基于机器视觉的鸽子种蛋识别技术与装置
2023-12-13冯燕柱宋安亮林钦永铁风莲
冯燕柱,蔡 肯,宋安亮,林钦永,铁风莲
(仲恺农业工程学院自动化学院,广州 510550)
0 引言
鸽子是一种肉质好、营养丰富、蛋白高、脂肪低的健康美食[1]。随着社会的发展和居民消费水平的提高,居民对肉鸽的需求量逐渐增加,肉鸽产业迅速发展[2]。目前肉鸽生产主要依靠人工孵化技术,但在进行人工孵化前需要对鸽子种蛋进行挑选[3]。鸽子种蛋挑选仍以传统人工方式为主,效率低、人工成本高,肉鸽产业的发展和经济效益收到严重制约。因此,急迫需要研究鸽子种蛋识别技术与装置,以提高效率、降低成本、释放劳动力,实现鸽子种蛋挑选自动化和智能化。
鸽子种蛋挑选主要为了选出受精的种蛋。目前,种蛋受精无损识别的方法主要有机器视觉法[4]、光谱技术[5]和光电检测技术[6]等。机器视觉法主要根据种蛋图像里的血丝特征进行受精判别[7]。光谱技术依据受精蛋与无精蛋内部物质的不同进而导致获取的光谱信息不同,从而能够判断是否受精[7]。光电检测技术依据种蛋的透光度进行受精识别[7]。研究表明,蛋重和蛋形指数对受精率无显著影响,但对鸽子活胚蛋孵化率影响较大[8]。光谱技术和光电检测技术都无法获得种蛋的蛋重和蛋形指数数据,而通过机器视觉法可以获得这些数据。国内外学者基于机器视觉对鸡蛋和鸭蛋的研究较多[9-10],对鸽子蛋的研究较少。因此,提出采用机器视觉法对鸽子种蛋进行识别筛选。
目前,机器视觉技术在工业领域得到广泛应用,其中在产品的识别分类[11-12]、尺寸测量[13-14]、抓取安装[15]和检测[16-17]方面应用广泛。本文基于机器视觉检测技术,结合鸽子种蛋的特征,设计了一台鸽子种蛋识别装置。通过机器视觉成像、中值滤波、二值化、形态学膨胀处理、最大类间方差法和自适应直方图均衡算法等方法准确识别鸽子种蛋受精特征和获取鸽子种蛋的蛋重和蛋形指数数据。
1 机器视觉鸽子种蛋识别原理及装置
机器视觉鸽子种蛋识别技术是利用工业相机对鸽子种蛋进行图像采集,并使用合适的图像处理算法对所获得的图像进行处理、计算,最终在鸽子种蛋图像中找出受精特征和计算出蛋重、蛋形指数。如图1 所示,机器视觉鸽子种蛋识别装置主要由工业计算机、工业相机、照蛋光源、避光箱、数据传输线和支撑架组成。照蛋光源提供合适的亮度,突显鸽子种蛋内部的特征信息,照蛋光源可以选用LED光源;避光箱相当于是黑箱,使得成像不受外部环境的影响,提高成像质量,避光箱由亚克力板加工组装而成;工业相机获取鸽子种蛋图像,通过数据传输线传给工业计算机处理;工业计算机应用图像处理算法对图像进行处理,获得鸽子种蛋的受精、蛋重和蛋形指数信息,最后结合这3种信息判断是否适合作种蛋。

图1 机器视觉鸽子种蛋识别装置示意图
2 鸽子种蛋图像处理
工业相机获取的图像由前景区域(鸽子蛋)和背景区域组成,如图2(a)所示。为了提高处理速度和简化图像处理算法,需要对所采集图像进行预处理提取前景区域。从图2(b)鸽子种蛋图像的三维图可以发现背景区域存在很多噪声点。中值滤波法是一种非线性数字滤波技术,去除椒盐类噪声较好,而且模糊轻微,边缘保留较好,本研究采用中值滤波去除背景区域的噪声点,处理结果如图3 所示。

图2 机器视觉系统采集的鸽子种蛋图像

图3 鸽子种蛋图像中值滤波处理前后结果
图像二值化处理是基于给定的阈值T 将前景区域和背景区域进行划分,从而获得相应的二值化图像。若前景区域中的点(x,y)满足f(x,y)≥T,则剩余点组成背景区域,二值化图像g(x,y)表示如下:
式中:T为给定的阈值。
自适应阈值分割算法(Otsu)是最大类间方差法,利用整幅图像的直方图特性确定全局的阈值T。基于中值滤波处理的结果,使用Otsu算法进行二值化处理,再进行形态学处理获取前景区域,处理结果如图4 所示。

图4 鸽子种蛋图像预处理前后结果
2.1 鸽子种蛋的蛋重和蛋形指数信息提取
研究表明鸽子蛋重为21.8 ~24.9 g,鸽子活胚蛋孵化率最高[8]。鸽子蛋的外形类似椭球形,所以可把鸽子蛋假设成椭球形状,那鸽子蛋的蛋重表示如下:
式中:me为蛋重;a 为鸽子蛋的长半径;b 为鸽子蛋的短半径;c为鸽子蛋的极半径;ρ为鸽子蛋的密度。
由于鸽子蛋的短半径b 和极半径c 相等,蛋重me只与长半径a、短半径b 和密度ρ 相关。鸽子蛋的横截面为椭圆形,其面积为πab,而每个鸽子蛋的密度可以看作常数,鸽子蛋的横截面面积和蛋重都是关于长半径a和短半径b 的函数,所以可以用鸽子蛋的横截面面积代表鸽子蛋的蛋重。基于预处理好的二值化种蛋图像,从二值图像中删除像素小于1 000 pixel 的连通域,然后计算连通域的面积,最后求最大的连通域面积即得到鸽子蛋的横截面面积,实例如图5 所示。

图5 鸽子种蛋的蛋重信息
研究发现鸽子活种蛋的孵化率随蛋形指数的增加而降低[8]。蛋形指数用蛋的横直径与纵直径的比值表示,鸽子蛋的横直径和纵直径如图6 所示。

图6 鸽子蛋的横直径与纵直径示意图
基于预处理好的二值化种蛋图像,求与该区域具有归一化二阶中心矩的椭圆长轴和短轴的长度,即可得到鸽子蛋的横直径与纵直径,蛋形指数也可得到,处理结果如图7 所示。

图7 鸽子种蛋的蛋形指数
2.2 鸽子种蛋的受精特征识别
工业相机采集到的受精蛋和无精蛋的图像如图8 所示,对比发现受精蛋图像比无精蛋图像颜色偏黄、透光率低,受精蛋图像中存在红色的血丝网特征,而无精蛋图像中没有血丝网。所以可以通过识别血丝网特征进行受精判断。

图8 受精蛋与无精蛋图像
彩色图像以一个三维矩阵的方式进行存储,包含红、绿、蓝3 个通道的信息,图像矩阵的第一维表示红色通道信息,第二维表示绿色通道信息,第三维表示蓝色通道信息。若用A表示一张彩色图像,则红、绿、蓝三通道图像可以表示为:
式中:R为红色通道图像;G 为绿色通道图像;B 为蓝色通道图像。
首先从原图像中获取前景区域即鸽子蛋区域作为处理对象,针对受精蛋图像中红色血丝网的特征,获取图像的红、绿和蓝三通道图像。然后将鸽子种蛋区域图像进行灰度转换,使用每个像素周围的局部一阶图像统计量来确定局部自适应图像阈值,使用该阈值进行二值化处理。膨胀运算是将与模板接触的背景点合并到目标对象中,能使对象的边界向外部扩大。将二值化结果图像取反,再用2 ×2 单位矩阵模板与取反的二值化图像进行形态学膨胀运算以获得受精特征的大概区域。通过对比发现,绿色通道图像中受精特征比较明显,将绿色通道图像与处理后的鸽子种蛋区域图像作点乘运算以获得绿色通道图像里的受精特征区域。再将处理后的绿色通道图像进行自适应直方图均衡化和局部自适应阈值二值化处理以增强受精特征区域。其次将处理的图像结果分别与红、绿、蓝三通道图像作点乘运算以获得各个通道图像中的受精特征区域;由于受精特征颜色为红色,对受精特征区域的红、绿、蓝三通道的像素进行筛选。当红色通道图像点R(x,y)比绿色通道图像点G(x,y)的值大于70 以上,同时比蓝色通道图像点B(x,y)的值大于70 以上,则判断该点(x,y)为红色特征即受精特征,保留该点(x,y)像素值,反之将该点像素值设为255。将处理得到的图像转化成灰度图像,使用Otsu算法进行二值化处理,将处理后的图像取反运算。最后通过求连通域的面积来计算受精特征的面积,与设定的阈值100 比较,若受精特征的面积大于阈值时即判断为受精成功,否则判断为受精未成功,处理结果如图9 所示。

图9 鸽子种蛋受精特征识别结果
3 试验结果分析
为了验证所应用方法的有效性,对采集到的样本鸽子种蛋图像进行测试。测试的样本图像数量为12 幅,其中6 幅为受精蛋图像,6幅为无精蛋图像,原图像的大小都为770 pixel×1 028 pixel,受精蛋和无精蛋图像都被成功识别。本文定义蛋的横截面面积的选择范围为110 000 ~160 000,蛋形指数的选择范围为0.65 ~0.76。若鸽子蛋为受精蛋,蛋的横截面面积在110 000 ~160 000 之间,且蛋形指数在0.65 ~0.76 范围内,则该鸽子蛋适合作种蛋,否则不适合作种蛋。鸽子种蛋的识别结果如表1 ~2 所示。从表中数据,可以发现无精蛋的蛋重结果偏小,这主要是无精蛋的透光率高,导致边缘区域不纳入计算范围。

表1 鸽子种蛋的识别结果1
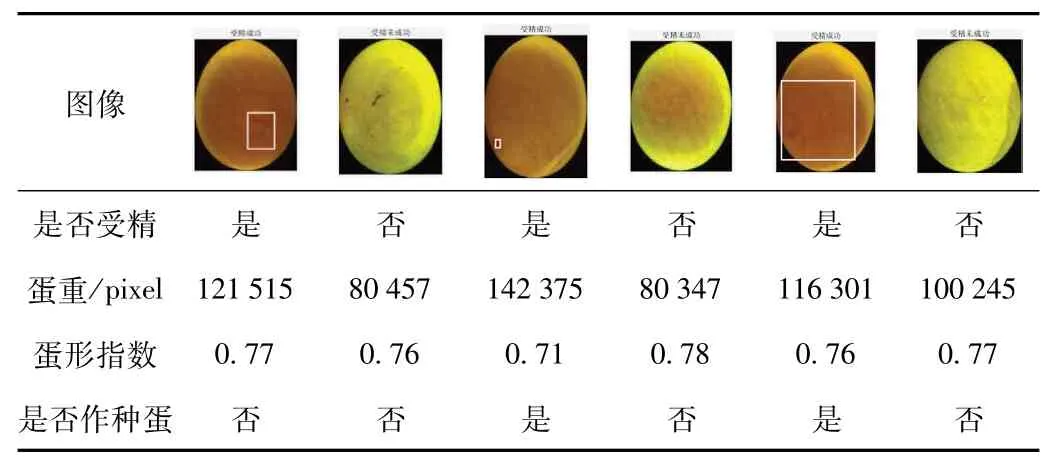
表2 鸽子种蛋的识别结果2
4 结束语
为解决人工挑选鸽子受精蛋存在的效率低、劳动强度大、主观性强等问题,本文设计了基于机器视觉的鸽子种蛋识别装置,运用灰度化、二值化等算法提取鸽子蛋的蛋重和蛋形指数数据。对鸽子蛋受精识别问题,通过分析鸽子蛋受精特征的特点,提出了利用绿色通道图像增强受精特征的方法,将红色通道图像与其余两通道图像对比获得受精特征,再结合受精特征的区域大小判断是否为受精蛋。实验结果表明该方法能够识别鸽子蛋的受精特征,有一定的适应性。结合蛋重、蛋形指数和受精情况3 项数据判断鸽子蛋是否适用作种蛋。在实际生产过程中,可以使用所提出的方法与装置对鸽子种蛋进行识别筛选。
