复杂异形钢结构精确定位与安装技术*
2023-12-13任烨军刘复磊杨成龙
陈 涛,刘 平,任烨军,刘复磊,杨成龙
(1.中国建筑第五工程局有限公司,湖南 长沙 410004; 2.广东中擎建设有限公司,广东 广州 510000)
1 工程概况
东莞市虎门TOD钢结构工程位于东莞市虎门高铁站旁,无地下室,高铁站东西横穿本项目,基地东接白沙南路。首层采用混凝土板梁;2层楼面采用钢梁上铺设压型板+钢筋+混凝土楼板;整体罩棚主桁架为类似飘带的双扭结构;3层穹顶和外环构架均采用钢结构,并设置3个不规则旋转楼梯。如图1所示,东西长40.674m,南北长46.541m,占地面积约 1 500m2,施工高度15.197m,体量约850t。本工程在施工过程中以空间大跨、法向穹顶、远距离悬挑和弯扭双曲面钢结构体系为主,是一种筒体多支撑的钢结构组合形式,预计用钢量为1 000余t,钢材质设计为Q355B。
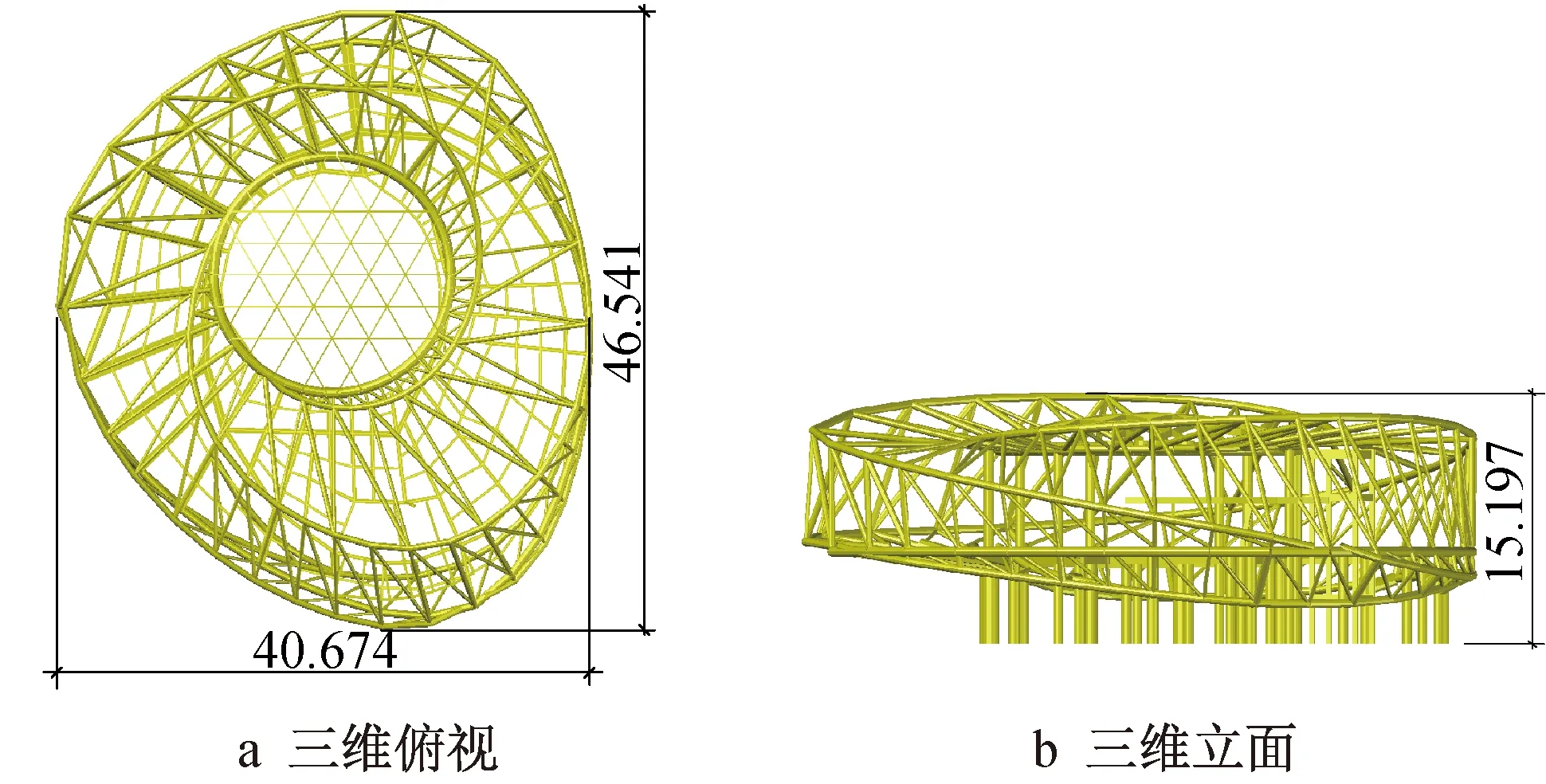
图1 钢结构三维模型(单位:m)
2 三维空间坐标定位难点分析
2.1 钢梁、钢柱精准定位
钢柱是呈不同心圆的2个圆形布置的埋深基础柱,均为圆管柱,共4种规格,埋深标高不统一且对标高与定位控制精度要求较高。钢柱分布形式间接导致钢梁交错呈扇形不规则网状相连,安装角度复杂,其中梁与梁、柱与柱、梁与柱间的对接需利用模型和轴线绘制坐标网,根据三维坐标值进行精准定位。钢梁、钢柱安装时,若为箱形结构,则断面要最大限度地保证管口对口精度,这在操作过程中具有很大难度。
本工程设置有单根跨度约12m的远距离悬挑梁,悬挑梁预起拱的设计提高了施工定位难度,需要设置大量支撑胎架,并需做好定期沉降监测。同时,又涉及高空作业,定位工作更加难以掌控。
2.2 不规则双曲外部壳体桁架三维空间坐标控制
钢结构外形整体是以双曲线形式呈现且为双曲线管桁网架,杆件主要为直缝高频焊接管和无缝管热弯成型,并采用地面胎架预拼装后大块体吊装方式进行安装。在施工过程中,因桁架杆件跨度较大,整体结构曲率也不断变化,最终以不规则曲面形式呈现,因此外部结构桁架和节点精准定位与安装难度较大,其杆件加工与安装精度必须保证在5mm以内才能满足要求。
经过研究,决定采取工厂试拼装解体后运输至现场预拼装,再按方案划分的单元体吊装空中合龙,并采用多点测量,全站仪进行全过程测量监测,以保证过程管控的精准度。
2.3 法向球面穹顶测量与定位
顶部球面穹顶由400mm×100mm矩形管制作而成,存在拼接错位现象,定位放线也是一大难点。拼装坐标定位是通过建立球面坐标系,确定3个数值,即2个角度(x-y轴为角度定位,z轴为高度定位),1个距离。
2.4 旋转楼梯制作放线与定位
外侧和中庭分别设置2个宽1m和1个宽4m旋转楼梯,楼梯梁全部为弯弧箱形梁。首先需要根据楼梯梁旋转弧度绘制出每根梁弧线坐标点,每根楼梯梁长度为35m左右,因为要体现弧形旋转线条,每隔100mm左右需设置4个坐标点,共需要设置500余处定位点,制作时需要用全站仪准确投至钢梁制作夹具上,然后将依据图纸开好料的钢板固定在夹具上,跟随夹具形状焊接成带弯弧箱形梁。并确保整个制作精度控制在3mm以内,便于现场安装不出差错。楼梯梁制作工艺如图2所示。
3 复杂钢结构精确定位与安装技术分析
3.1 三维空间坐标测量定位技术
梁、柱施工过程中,因立柱分布独特、钢梁连接多而复杂,外部壳体桁架呈双曲面飘带围绕及球面穹顶弧形射线分布等特点。若在常规施工过程中,通过平面直角坐标系进行测量即可实现,但在本工程施工中如果依然采用常规测量方法,将无法保证测量精度,施工质量也如此。为确保工程顺利施工,技术人员采用实时三维空间测量定位技术,在计算机技术帮助下进行辅助测量。技术人员需结合设计方案中已有定位坐标建立模拟坐标系,然后在模拟坐标系中导入建筑模型参数,通过计算机计算核验,精准计算出每个关键节点坐标位置,最后设定其编号并进行存储(在定位时需用全站仪)。实时三维测量定位技术在应用过程中具有以下优势。
1)此项技术可应用于各种复杂部件测量且操作便捷,只需在虚拟坐标系中输入相应建筑模型参数即可,可进一步简化复杂测量过程。同时,在测量时需利用全站仪保证测量精度,使测量效率大大提升。
2)实时三维测量定位技术在应用过程中适应性更强,且所需配套设备成本较低,故在一定程度上降低了建筑企业产生额外施工成本的风险。
3)具有更高的自动化与智能化程度。因全站仪在测量过程中能实现对数据的自动计算并存储测量结果,可进一步降低测量人员工作压力。
实时三维测量定位技术应用过程如下。
1)建立控制网 技术人员需要在计算机软件中建立虚拟测量空间,同时确认坐标原点,然后利用坐标定位法进行测量。
2)实施测量 为进一步提高技术测量速度与精度,施工人员在安装杆件前需研读施工图纸,为测量工作做好准备,同时在需要安装的杆件上进行标记与编号并存储,在此基础上利用三维模拟测量技术在计算机软件模拟的空间中计算出具体坐标值,将数据存储至全站仪,在实际操作时工作人员只需要调出相应编号即可。对不同控制点做必要安全防护,技术人员通过平差计算后验证最大点位数据误差为2mm,边长最大相对误差为 1/22 000,定位精度符合施工要求。
因此,在实时三维空间测量定位技术支持下,各种复杂异形曲面钢结构造型建筑现场安装定位精度可得到有效提高,进而保证施工效率和质量。
3.2 外部管桁架壳体腹杆相贯面旋转就位技术
因整个外部为双曲面壳体结构,在管桁架腹杆预拼装过程中,通常采用单根杆件的吊装方式,腹杆在与节点对位时,节点需要与腹杆进行相贯面对位,施工人员必须调整杆件管孔进行转动。因此,为最大限度地避免腹杆在吊装过程中出现杆件滑落情况,工人在吊装时一般在近上弦节点腹杆的杆端处焊接定位板作为防滑装置。虽极大程度上保证了吊装安全,但还是会在一定程度上影响吊装效率,使相贯面对位时间再次延长。而且施工结束后,工作人员还需切除防滑装置并对该位置进行打磨、涂刷,继而会带来一定施工强度影响,甚至存在影响施工工期的风险。
为最大限度地提高施工效率和质量,技术人员对管桁架腹杆安装工艺进行深入研究并实现了技术创新。具体内容为:技术人员将定位销安装在上、下弦杆定点处,在吊装时将腹杆相贯口套在定位销外,定位销直接保留于杆件上且对钢结构自身几乎无影响,也不存在影响后续美观问题。经工程实际验证可知,此项技术不仅安全可靠,同时可实现多杆同步吊装,因此,可有效提高施工效率,进一步降低施工人员劳动强度,并免除后续切割、打磨工序;还可有效解决相贯面对位难题,故在钢结构定位安装过程中具有实际指导意义。
4 超长空间弯扭结构预拼装定位与安装
4.1 整体外部结构拼装单元块体划分
依据方案和设计模型,对整个结构进行区域单元块体合理划分。单元块体划分如图3所示。
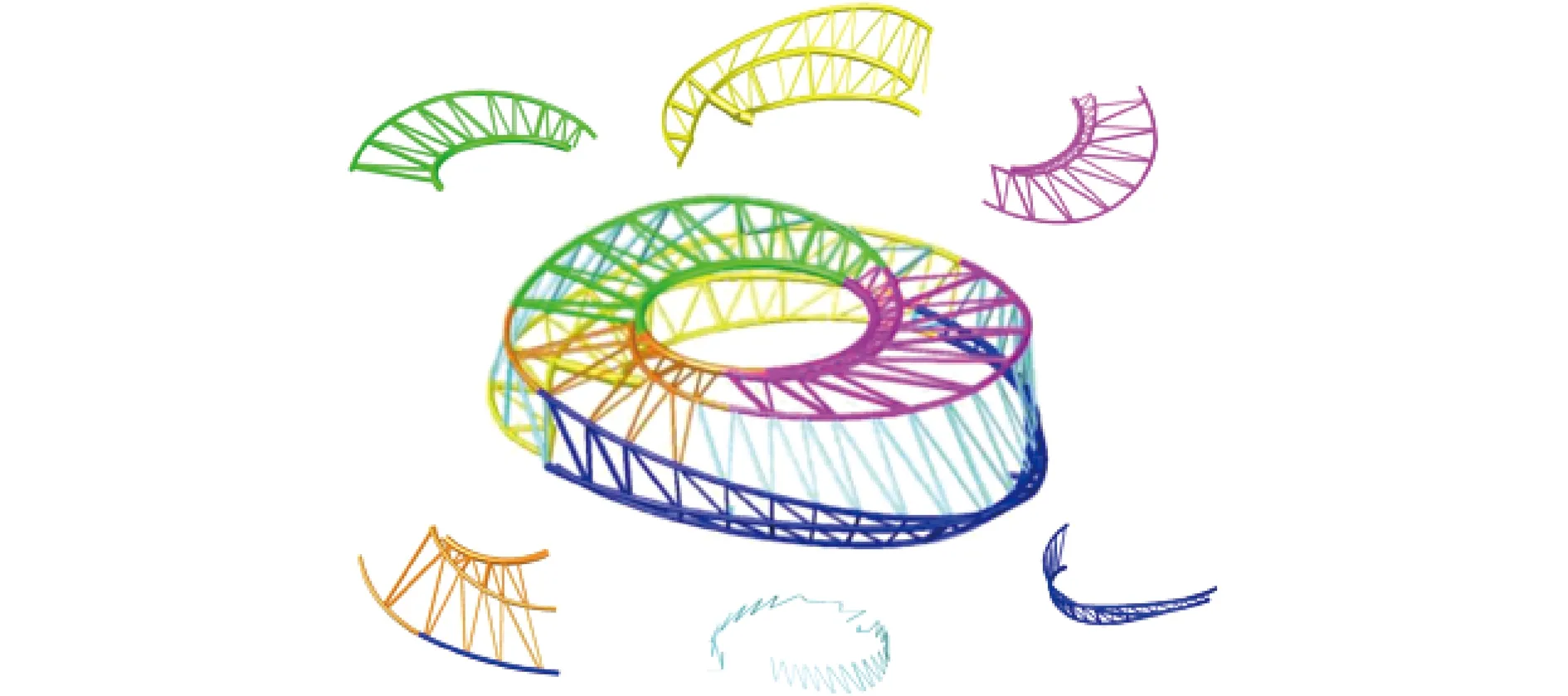
图3 外部结构单元块体划分示意
首先应考虑整个结构稳定性,其次考虑构件分段部位对接时的精度控制难易程度,还需要考虑每个单元块体整体自重,编制详细的专项施工方案报审,依据方案计划好吊装设备站位和吊装场地。
整个外部管桁架壳体安装顺序为:在对应模型和图纸设定的支撑胎架定位点安装固定好格构柱,然后按先底部后上部、先外部后内部的施工顺序,先将第1,2单元片体安装固定,支撑胎架受力,再将与单元片体相连的所有悬挑梁安装就位,监测沉降位移数据,确保无下挠变形,然后按顺时针方向安装其他单元片体,最后进行补档合龙闭合。
4.2 对弯扭杆件坐标值进行复测
外围结构为弯扭钢柱体系,其中弯扭杆件约200根,总重约380t,杆件长度约12m,每根杆件弯扭角为20°~52°,因该体系中弯扭杆件长短、倾斜角度差异较大,有些杆件甚至与地面倾斜角度接近20°,故在定位与安装时难度较大。在进行弯扭杆件安装时,技术人员需采用全站仪多次测量安装的最低位置并标记十字线作为安装控制线,同时精准测量杆件中部多个点和顶部坐标,以此确认弯扭杆件具体长度及曲度。
4.3 杆件预拼装
预拼装是国内外常见的拼接方法,该方法有效降低了高空作业工作量,避免高空作业危险性并提高了施工人员作业安全性。施工人员需在拼装前搭设胎架以保证胎架能够承受杆件自重,然后分别吊装两端杆件放置至胎架上,并做好支撑。利用全站仪对钢柱上、下两端接口的4个端点及中部弯扭部分坐标值进行精准测量,测量数据符合施工标准后,施工人员则需对钢柱进行定位焊接,此时必须保证2个人同时对称焊接,以避免钢柱在焊接过程中收缩变形,最大限度地保证杆件拼接精度,待定位焊接完成后方可进行全程焊接。
4.4 超长空间弯扭结构预拼装块体吊装方法
在超长空间弯扭结构预拼装块体安装时,采用多点支撑胎架支承受力部位的方法。首先测量人员将设置的胎架支撑点引至相应部位并做好明显标记;单元块体起吊时利用缆风绳稳定,缓慢吊至设定部位,就位后观测是否出现沉降,并调校至设定坐标点;胎架完全受力后方可焊接固定部位,加强临时固定措施后可松开吊钩;复测各定位点是否在设定范围,消除误差并做好下一榀块体合龙对接准备。在卸载作业区域范围内禁止无关人员进入,并且作业面杂物卸载前必须保证清理完毕,防止卸载过程中杂物坠落。支撑胎架安装阶段和卸载阶段标高对比如表1所示。不同测点下标高差值曲线如图4所示。
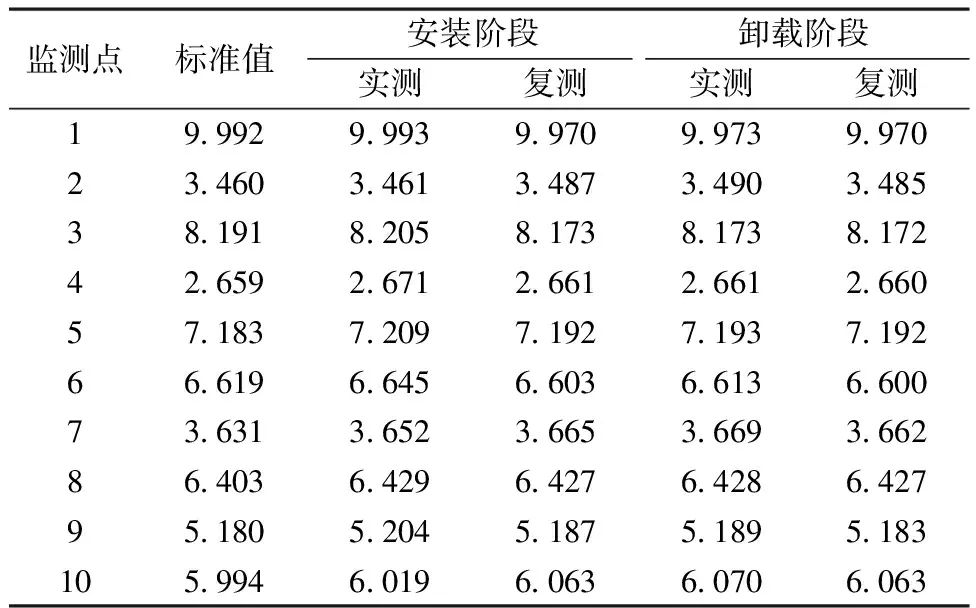
表1 支撑胎架安装和卸载后标高对比
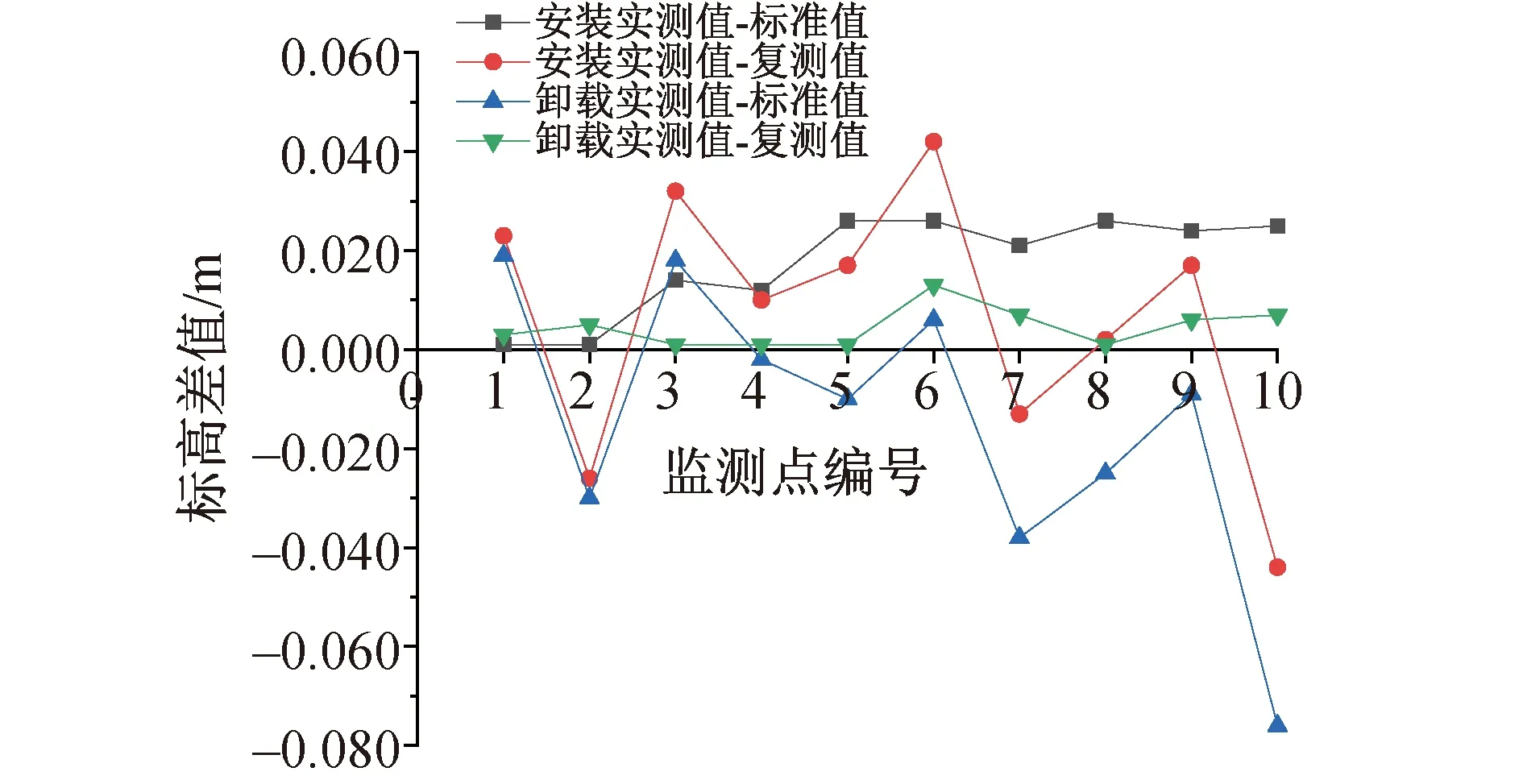
图4 不同测点下标高差值曲线
由图4可知,标准标高与安装实测值相比最小相差0.01%,最大相差0.36%,整体呈略微抬升趋势,最大处标高抬升2.6cm。可见抬升距离和缩小比例均较小且数据结果吻合良好。当安装阶段再次进行复测后整体标高呈回弹趋势,如最大减小0.63%,局部测点标高略微抬升,最大相差4.4cm。而卸载后实测值与标准标高相比整体趋势略微增加,最大增长比例为1.27%,最大处标高抬升7.6cm。卸载后复测得到整体呈回弹趋势,标高最大缩减比例为0.20%,最小为0.02%,可见卸载前后标高影响较小。综上可看出现场实测与标准标高相差均较小,故可反映多点支撑胎架支撑受力部位的方法可行。
5 结语
1)针对实时异形梁柱、外部双曲面壳体桁架和球面穹顶的三维空间坐标测量定位技术,经验证,最大点位数据误差为2mm,边长最大相对误差为1/22 000,现场安装可有效提高定位精度且保证施工效率和质量。
2)对外部管桁架壳体腹杆相贯面旋转就位技术进行创新,经验证,其可实现多杆同步吊装。
3)针对超长空间弯扭结构预拼装块体吊装方法,经多次实测数据与标准值最大处增加比例为1.27%且吻合良好,故该方法可行性较好且对实际施工具有一定技术指导意义。
