多雷达组网与协同探测关键技术研究
2023-12-12齐崇英贺峰陈超
齐崇英 贺峰 陈超


摘 要:瞄准未来强对抗环境下雷达网作战任务需求,开展了多雷达组网与协同探测关键技术研究。首先,介绍了雷达网作战能力需求,其次,在雷达网传统树状层级结构基础上,给出新的雷达网分布式网络化体系架构,最后,研究了雷达网信息分发共享、情报融合处理、自主协同探测、系统反馈控制等关键技术。研究成果有助于促进多雷达组网理念更新与领域技术发展,为推动雷达装备和情报系统的迭代升级提供思路。
关键词:多雷达组网;体系架构;协同探测
中图分类号:TN95 文献标志码:A DOI:10.3969/j.issn.1673-3819.2023.06.007
Research on key technology of multi-radar network and cooperative detection
QI Chongying, HE Feng, CHEN Chao
(Academy of Air Force,Beijing 100085, China)
Abstract:In this paper, the key technologies of multi-radar network and cooperative detection are studied in order to meet the urgent needs of radar network operations in the future strong countermeasure environment. Firstly, the operational capability requirements of radar network are introduced. Secondly, based on the traditional tree hierarchical structure of radar network, the new distributed network architecture is given. Finally, the key technologies of radar network information distribution and sharing, intelligence fusion processing, autonomous cooperative detection and system feedback control are studied. This paper will promote the updating of the concept and the development of the domain technology of the multi-radar network, and will promote the iterative upgrading of radar equipment and intelligence systems.
Key words:multi-radar network; architecture; cooperative detection
收稿日期:2023-04-06
修回日期:2023-06-02
*基金項目:国防科技卓越青年科学基金(2020-JCJQ-ZQ-006)
作者简介:齐崇英(1978—),男,博士,高级工程师,研究领域为多源信息融合、多传感器协同探测。
贺 峰(1981—),男,博士。
雷达是国家空天预警体系的主体,是获取空天目标实时信息的主要力量。谱系、型号多样的雷达装备,有效担负了国家空天安全预警监控职能。然而,随着信息技术的不断发展,高隐身、超低空、强机动、超声速等新的空天目标不断出现,单雷达难以有效应对各种目标威胁,更难以满足对目标及时发现、稳定跟踪与精准识别的需求。为此,多雷达组网应运而生,其利用通信网络和计算机技术,将一定区域内配置的多部不同体制、不同型号的雷达进行分布式部署和网络化集成,从而构成新的网络化装备,产生新的体系作战效能。由此看出,多雷达组网是一种过程或行动,更强调从作战需求、技战术运用上将多部雷达进行体系集成,最终构成物理形态上由雷达装备、通信网络、情报处理系统等组成的雷达网。
当前,多雷达组网受到普遍关注,领域技术得到蓬勃发展,但仍存在体系架构落后,雷达装备间自主协同能力弱,精细化管控水平低等问题,难以适应瞬息万变的空战场态势,更不能适应强对抗环境下软杀伤、硬摧毁时自我生存能力的需要。针对上述问题,本文开展了多雷达组网能力需求、新的分布式网络化体系架构以及多雷达组网与协同探测领域的关键技术研究,以期促进多雷达组网理念更新与领域技术发展,推动雷达装备和情报系统的迭代升级。
1 多雷达组网能力需求
信息化、智能化条件下,空中目标向“高快隐”和“低慢小”两极化发展,单一雷达难以完成复杂背景下的探测任务,为进一步提高对目标的发现跟踪能力[1],延长威胁预警时间,适应强对抗条件下对雷达网不间断、高质量、强韧性的情报保障需求,要求多雷达组网[2]具备以下能力。
1)更广的探测覆盖空间
为实现对空中目标的尽远探测发现,要求雷达网中不同体制、不同型号、不同频段的雷达按一定原则分散部署[3],相邻雷达的探测包络能在空域上相互衔接,频域上参差交错,从而形成更广阔的空域覆盖和频域覆盖。
2)更高的目标检测能力
“高快隐”和“低慢小”目标使雷达网面临较大的威胁,通过不同频段、不同体制、不同部署位置的雷达对目标的共视探测[4-5],雷达网能够比单雷达提供更多的目标发现机会,从而提高目标检测概率。
3)更稳定的目标跟踪能力
雷达网充分利用多部雷达的点航迹数据,能够进行航迹快速起始,缩短融合航迹更新周期。通过交互多模型(IMM)算法,提高系统对各类运动目标的快速响应和跟踪能力,采用序贯滤波融合缩小融合航迹点间隔,进一步提升目标跟踪精度。
4)更强的抗扰顽存能力
为应对电磁干扰和反辐射导弹威胁,不同体制、不同频段的雷达交错配置,构成有机统一的雷达网,其频率、波形、脉宽、重复频率、极化方式各异,可迫使对方干扰能量分散,增加其侦察、分选、干扰的难度,从而提高雷达网抗扰顽存能力。
2 雷达网体系架构
2.1 传统树状层级架构
受“平台中心战”思想影响,传统雷达网主要为树状层级结构,以战役级雷达单位为例,情报信息自下而上报送,作战指挥命令自上而下施行,如图1所示。
这种体系架构存在三方面问题:一是网内各雷达独立执行预警探测任务,战场信息获取主要由各探测器独自完成,相互间缺少情报共享与横向协同,未充分发挥多雷达组网优势;二是各雷达统一受控于上级单位,作战中的“观察—判断—决策-行动”这一过程需要指挥员自上而下地进行协调指挥,指挥效能低下;三是多层级间为节点式架构,体系抗毁性差,无法适应强对抗环境下的未来战争。
2.2 分布式网络化体系架构
为建立高效统一的情报共享与协同机制,基于“网络中心战”思想,构建新的分布式网络化体系架构,以战术级雷达单位为例,其架构如图2所示。
由图2可以看出,雷达单位内部构建集中与分散相结合的系统架构,所属雷达装备既直接受控于上级任务单位,雷达装备间又可根据作战需求进行灵活的任务分组,任务组内各雷达间可共享情报与自主协同。同理,上一层级的不同雷达单位之间也采用类似架构,形成上一层级集中与分散相结合的分布式体系架构。在分布式体系架构下,根据空情态势、目标威胁程度、雷达工作状态等,多雷达间可自动进行情报分发共享、基于规则实现相互协同引导、基于任务实现装备的集中管控。
3 雷达网协同探测关键技术
3.1 信息分发共享
分布式、网络化体系架构下,可建立网内多雷达间的情报共享机制。当一部雷达发现目标时,根据雷达所属单位及目标所处位置,自动向上级雷达单位及目标责任区单位共享情报数据,并向未探测到目标的友邻雷达发送协同引导信息。此方式可直接由传感器源头进行信息的分发共享,避免了由上级处理单元进行信息转发带来的信道带宽占用多,服务器节点压力大等问题。信息分发共享流程如下:
1)雷达A搜索发现空中目标,判断目标位置处于哪个单位的责任区,以及周边可探测雷达情况;
2)根据情报共享机制,雷达A上报情报至直属上级单位及目标责任区的单位,并向有探测能力的雷达B共享情报;
3)雷达B根据雷达A的目标指示信息,调整雷达工作模式及探测扇区,及早截获目标;
4)上级单位或友邻责任区单位的情报处理单元汇集目标探测信息,进行多雷达情报融合处理,从而获取目标精确位置参数信息。
3.2 情报融合处理
1)目标融合编批
情报处理单元接收多部雷达上报的点迹或航迹信息,对上报信息进行时空一致性校准、多雷达点航迹相关、航迹起始、滤波估计等,实现对目标的连续稳定跟踪。各情报处理单元按照事先分配的航迹批号段,采用“先发现,先编批”原则,按照流水号顺序对目标依次编批。
2)统一态势生成
情报处理单元按责任区职责报告目标融合航迹,相邻情报处理单元共享融合航迹态势,后发现目标的情报处理单元沿用目标原始批号,并对下级的传感器处理节点进行目标统批,确保全网分布式、多层级系统间目标态势一致。
3.3 自主协同探测
1)协同规则构建
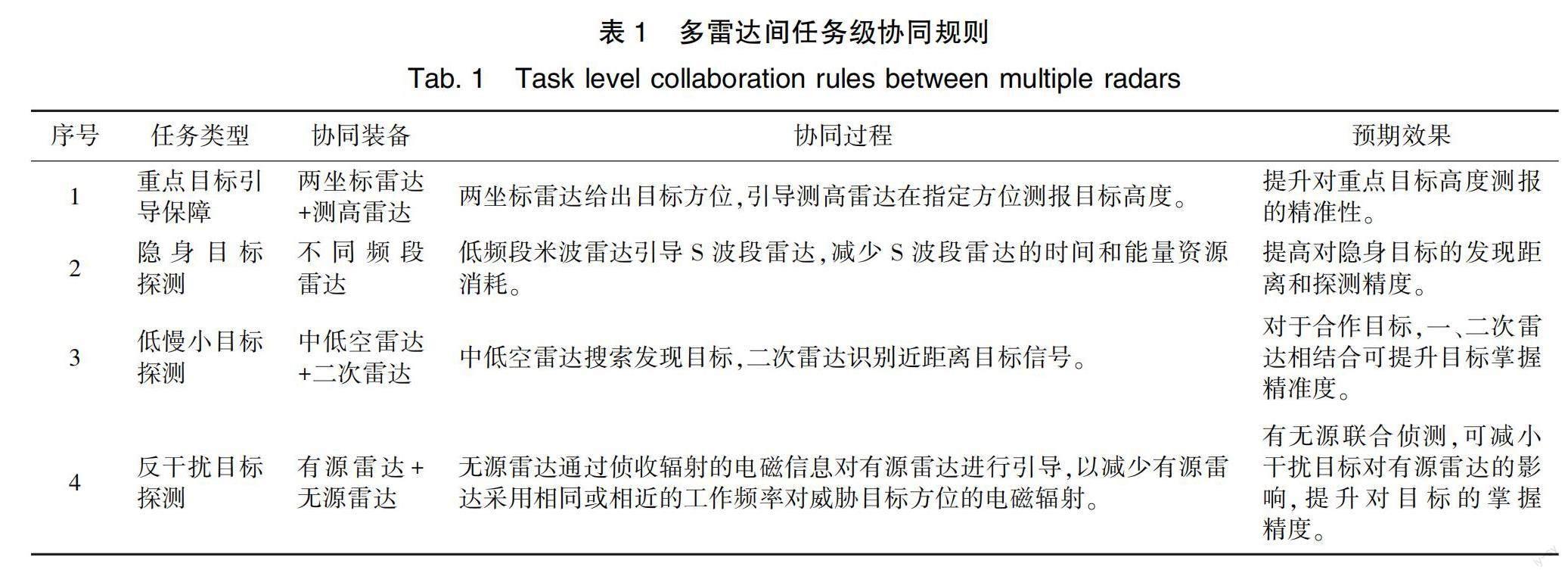
多雷达自主协同探测[6-7]是为了合理地分配雷达任务,扩展探测区域的空间和时间覆盖范围,提高对目标的检测和连续跟踪能力。自主协同探测的关键是制定合适的协同运用规则,即在目标特性库和多雷达能力模型基础上,建立一组雷达装备选配方式和装备工作指令集,形成系统可自动识别使用的算法策略。表1列举了多雷达间任务级协同的规则。
针对重点目标、隐身目标、低慢小目标及干扰目标,在各型雷达均能探测发现目标的情况下,表1的协同规则集对多雷达探测任务进行合理区分,实现不同頻段、不同体制雷达的优化组合,从而完成雷达网对目标的合理精准探测。
2)协同探测机理
通常,任务开始前,雷达网会进行任务规划,生成雷达网探测预案。实际作战过程中,空战场态势复杂多变,需要根据实时战场态势对网内雷达进行有效的指挥控制。为提升指挥控制的时效性、精准性及智能化程度,需要由协同规则引擎实时解算上述多雷达协同规则,自动进行任务级或参数级的协同控制,其工作原理如图3所示。
由图3可以看出,基于任务和空战场实时态势,在多雷达信息分发共享基础上,多雷达网可自主进行多雷达间的任务级协同或参数级管控,从而缩短雷达网自身的 “观察-判断-决策-行动”(OODA)循环周期,提升多雷达组网探测效能。
3.4 系统反馈控制
1)情报质量监控
多雷达组网的目的是为了得到更优的情报,因此,需要建立合理的情报质量监控指标体系[8],实时监控融合情报质量,并给出及时的告警提示。不同于情报质量的事后评估分析,此处更为关注实时目标的要素完整性(如是否由目标属性、机型、架数、二次代码)、高度可靠性(如目标是否由三坐标雷达、测高雷达掌握)、位置准确性和航迹连续性(如目标辅站数量、辅站类别)等,以便根据监控信息和告警,提示值班人员进行相应处置,或根据系统管控规则,适时调整网内雷达装备或系统工作状态。
2)闭环反馈控制
融合情报质量与雷达、系统工作状态密切相关,本文基于实时情报质量监控结果、融合模型算法、雷达控制规则等,建立情报处理系统与雷达装备的闭环反馈控制模型,其信息交互内容与反馈控制关系如图4所示。
由图4可以看出,系统根据情报质量监控结果,可向值班人员及时反馈目标漏批、混批及机型、架数等情况,提示战勤人员进行相应处置。系统自动生成点航融合控制指令,修正融合模型及算法参数,提升融合航迹质量。根据网内雷达工作状态,系统动态调控雷达及附属设备工作模式、状态参数、抗干扰措施等。常见雷达管控规则包括:
1)根据情报质量监控结果,控制无源雷达、二次雷达、III型询问机等开关机,提高目标识别能力和要素完整性;
2)增开三坐标雷达、测高雷达,提升目标高度的可靠性和准确性;
3)根据“低慢小”目标特点,调整雷达的工作模式、检测门限、天线转速与俯仰等参数,改善对目标的探测跟踪效果;
4)根据隐身目标特点,调整雷达工作模式、上报点迹区域、检测门限、工作频率、极化方式等,更好地获取低可探测目标的有效点迹;
5)根据目标的机动状态,调整雷达的检测门限、天线转速等,提高对目标的连续跟踪率。
4 结束语
为充分发挥多雷达组网探测效能,本文在研究多雷达组网能力需求基础上,提出了集中与分散相结合的分布式网络化雷达网体系架构,开展了雷达网信息分发共享,情报融合处理,自主协同探测,系统反馈控制等关键技术研究。研究表明,通过末端多雷达间的扁平化组网、情报共享、横向自主协同与反馈控制,可使原分散部署、独立使用的雷达装备一体化组网运用,大幅提升雷达网体系探测效能和融合情报质量。
参考文献:
[1] 何友, 王国宏, 陆大紟, 等. 多传感器信息融合及应用[M]. 2版. 北京: 电子工业出版社, 2007.
HE Y, WANG G H, LU D J, et al. Multisensor information fusion with applications[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2007.
[2] 丁建江, 許红波, 周芬. 雷达组网技术[M]. 北京: 国防工业出版社, 2017.
DING J J, XU H B, ZHOU F. The technology of netted radar system[M]. Beijing: National Defense Industry Press, 2017.
[3] 刘洋, 宫志华, 田家磊, 等. 基于量子遗传算法的雷达组网布站分析[J]. 弹道学报, 2019, 31(4):39-43, 67.
LIU Y, GONG Z H, TIAN J L, et al. Analysis of radar netting disposition based on quantum genetic algorithm[J]. Journal of Ballistics, 2019, 31(4):39-43, 67.
[4] 任骞. 雷达组网探测系统任务规划软件设计[J]. 现代雷达, 2019, 41(3):7-11.
REN Q. Design of mission planning software of radar network detection system[J]. Modern Radar, 2019, 41(3):7-11.
[5] 李志汇, 刘昌云, 倪鹏, 等. 反导多传感器协同任务规划综述[J]. 宇航学报, 2016, 37(1):29-38.
LI Z H, LIU C Y, NI P, et al. Review on multisensor cooperative mission planning in anti-TBM system[J]. Journal of Astronautics, 2016, 37(1):29-38.
[6] 韩志钢, 卿利. 多节点传感器协同探测技术综述与展望[J]. 电讯技术, 2020, 60(3): 358-364.
HAN Z G, QING L. Overview and prospect of cooperative detection technology for multi-nodes sensors[J]. Telecommunication Engineering, 2020, 60(3): 358-364.
[7] 徐羽丰, 王玉珠. 多传感器自适应协同管控方法[J]. 指挥信息系统与技术, 2021, 12(3):72-76.
XU Y F, WANG Y Z. Method for multi-sensor adaptive collaborative control[J]. Command Information System and Technology, 2021, 12(3):72-76.
[8] 朱兴乐. 雷达组网系统效能评估指标体系设计[J]. 舰船电子对抗, 2019, 42(5):48-51, 91.
ZHU X L. Design of efficiency evaluation index system of radar networking system[J]. Shipboard Electronic Countermeasure, 2019, 42(5):48-51, 91.
(责任编辑:张培培)