幅度信息辅助的认知雷达跟踪波形选择
2023-12-12熊芳勇王建涛黄洁党同心
熊芳勇 王建涛 黄洁 党同心


摘 要:为提升认知雷达跟踪性能,提出了一种幅度信息辅助的认知雷达跟踪波形选择算法。首先,讨论了认知雷达跟踪波形参数选择的框架,其次,分析了幅度辅助跟踪概率数据关联的性能,提出了波形参数选择的方法;最后,结合交互式多模型无迹卡尔曼滤波器(Interactive Multiple Model Unscented Kalman Filter,IMMUKF)提出了幅度信息辅助的认知雷达跟踪波形选择算法。仿真结果表明,所提算法能有效提升目标跟踪性能,同时减少了目标跟踪丢失概率。
关键词:幅度信息;认知雷达;目标跟踪;波形选择
中图分类号:TN953 文献标志码:A DOI:10.3969/j.issn.1673-3819.2023.06.008
Amplitude information aided waveform selection for cognitive radar tracking
XIONG Fangyong1,2, WANG Jiantao1, HUANG Jie1, DANG Tongxin1
(1. University of Information Engineering, Zhengzhou 450001; 2.94326 troops of PLA, Jinan 250000, China)
Abstract:In order to improve the tracking performance of cognitive radar, this paper proposes a waveform selection algorithm for cognitive radar tracking assisted by amplitude information. Firstly, the framework of waveform parameter selection for cognitive radar tracking is discussed. Secondly, the performance of amplitude-assisted tracking probability data association is analyzed, and the method of waveform parameter selection is proposed. Finally, combined with the Interactive Multiple Model Unscented Kalman Filter (IMMUKF), an amplitude information assisted waveform selection algorithm for cognitive radar tracking is proposed. Simulation results show that the proposed algorithm can effectively improve the target tracking performance and reduce the probability of target tracking loss.
Key words:amplitude information; cognitive radar; target tracking; waveform selection
收稿日期:2022-12-13
修回日期:2023-03-20
作者簡介:
熊芳勇(1987—),男,硕士,助理工程师,研究方向为目标信息获取与处理。
王建涛(1984—),男,博士,讲师。
认知雷达[1]相较于传统雷达在多种任务场景下都体现出了性能优势,其中面向跟踪任务的认知雷达能够基于感知-行动循环(Perception-Action Cycle, PAC)过程的波形参数选择实现雷达跟踪精度的有效提升[2-6]。雷达跟踪任务的PAC循环流程是根据先验信息和当前的观测数据的信息反馈,在最小化代价成本(跟踪性能)的准则下选择作用于下一时刻的发射波形,波形与目标和环境交互后以回波的形式被接收,经过雷达信号处理后提取新的观测信息进行跟踪,并形成下一时刻的信息反馈。图 1展示了典型的认知雷达跟踪波形参数选择的PAC循环流程。
基于贝叶斯框架的雷达跟踪问题可以等效为利用模型先验知识和观测更新数据对目标进行参数估计的问题。认知雷达波形选择的其中一个关键问题正是如何界定波形与观测误差的关系、先验误差与观测误差的关系。因此波形选择问题可以分为基于控制理论或信息论的两类方法[7],即基于观测数据质量的跟踪波形优化[8-11]和基于信息论准则的跟踪波形优化[12-17]。前者更加注重通过波形选择提高观测数据的质量,即改善观测数据自身的精度来提升跟踪性能;后者将跟踪与滤波过程相结合来减小最终滤波的融合误差。
基于控制理论的跟踪波形自适应最早见于文献[8],将观测噪声协方差近似为参数估计的克拉美罗下界(Cramer-Rao Lower Bound, CRLB),在线性观测关系和高斯噪声的前提下,通过卡尔曼滤波(Kalman Filter,KF)的线性递推关系给出了在最小均方误差准则和最小信息熵准则下的跟踪波形参数的闭式求解。文献[9]针对密集的量测虚警场景下的跟踪问题,提出了波形自适应概率数据关联滤波算法(Adaptive Waveform Selection Probabilistic data association filter,WSPDAF),极大地改善了跟踪性能。文献[15-16]提出了量测虚警场景下基于雷达任务的机动目标跟踪的自适应波形选择算法及自适应发射波形与检测门限联合优化方法。基于信息论的波形优化[17-19]的典型应用是通过分数阶傅里叶变换(Fractional Fourier Transform,FrFT)建立旋转波形库实现的,通过求解与先验误差椭圆正交的角度去变换观测误差椭圆的方向。
以上两类方法实现波形选择的过程,对于目标状态的反馈,仅仅利用了雷达目标信息中的一部分(例如时延与多普勒信息),这些信息直接表现为目标的距离、径向速度与方位观测值,然而在目标回波信息中包含的其他有用信息(目标幅度)并未得到有效的利用。事实上,利用目标幅度信息辅助的方法能够显著改善雷达对目标的检测跟踪性能[20-22],考虑将幅度量测信息辅助的跟踪结合认知雷达波形选择,将能进一步提升认知雷达跟踪性能。
1 认知雷达系统模型
2 幅度辅助的目标跟踪
3 机动目标跟踪波形选择算法
4 仿真分析
4.3 仿真结果及分析
机动目标航迹是在虚警密度ρ=1×10-6,虚警率PFA=1×10-2,参考距离r0=50 km的情况下的目标跟踪航迹如图3所示。波形选择的认知雷达跟踪航迹更加接近真实航迹,而加入幅度信息辅助的波形选择跟踪过程精度明显更好,尤其是在机动转弯处的轨迹平滑、精度高。
单次跟踪过程的交互式多模型的概率更新见图 4,可见CV模型与CS模型的多模型库较好地实现了转弯机动过程中的机动跟踪模型切换。
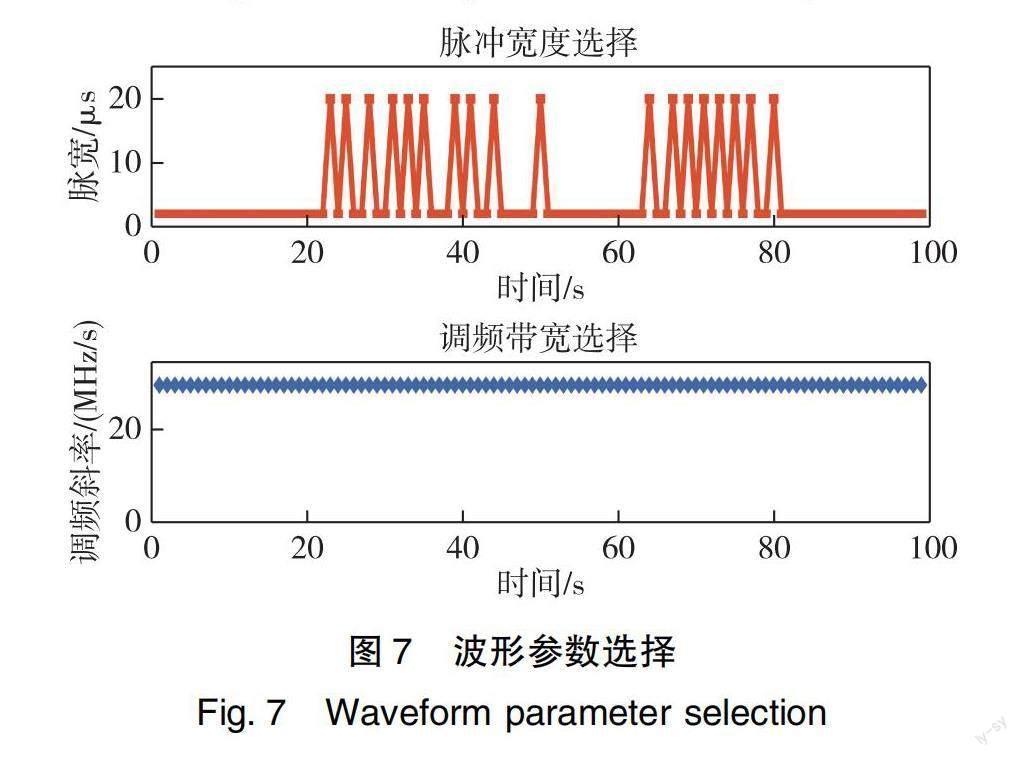
图5和图6是虚警密度ρ=1×10-6,虚警率PFA=1×10-2,参考距离r0=50 km的情况下蒙特卡洛仿真结果,只计算有效跟踪轨迹的均方根距离误差和均方根速度误差对比图,从图6和图7中可以看出,本文所提算法相比对比的三组跟踪策略体现出较大的性能优势。
不同仿真参数跟踪性能指标如表3所示。
从表3第一组数据来看,使用幅度信息辅助的波形选择跟踪,相比于常规的波形选择跟踪方法,距离跟踪精度提升9.7%,速度跟踪精度提升7.5%,失跟率减少1.4%,相比于固定波形跟踪,距离跟踪精度提升31.5%,速度跟踪精度提升22.5%,失跟率减少5.6%。结合第二组数据,虚警密度变大时,跟踪精度均有所下降,但此时幅度辅助的波形选择相比波形选择的失跟率减少1.2%。从第三组数据看,当参考距离变大,信噪比提升后,各跟踪策略误差均明显减少,本文算法在失跟率性能优势上提升明显,相比于波形选择的失跟率减少2.2%,这是因为在信噪比提升后,目标的量测幅度提升较大。
5 结束语
为提高在杂波背景下的认知雷达跟踪性能,本文首先介绍了认知雷达跟踪波形参数选择的方法,分析了杂波背景下量测幅度信息辅助跟踪的方法,因PDAF-AI性能难以获得闭式的参数表达式,本文提出了一种次优的波形参数选择方法,并论证了该幅度信息辅助的方法跟踪性能优于经典的WSPDAF方法。最后,并以瑞利分布杂波背景下的Swerling Ι型目标为例进行了仿真实验。针对机动跟踪问题,在交互式多模型跟踪框架下,提出了本文的AIWSCRT算法。通过仿真分析,验证了方法的有效性。量测幅度信息辅助的机制结合雷达接收端对环境的认知理解,进一步提升了仅有波形选择机制的认知雷达的跟踪性能,然而本文讨论的方法并不是最优波形参数选择,下一步研究将考虑现实雷达跟踪问题的复杂性,幅度信息辅助的方法通常运用在檢测前跟踪问题中,将目标幅度量测信息作为原始观测数据信息保留,进行帧间的数据积累,在此类问题上结合雷达跟踪的波形设计将更有研究价值。
参考文献:
[1] HAYKIN S. Cognitive radar: a way of the future[J]. IEEE Signal Processing Magazine, 2006, 23(1): 30-40.
[2] LI Z J, XIE J W, LIU W J, et al. Joint strategy of power and bandwidth allocation for multiple maneuvering target tracking in cognitive MIMO radar with collocated antennas[J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 190-204.
[3] ZHANG H W, LIU W J, SHI J P, et al. Joint detection threshold optimization and illumination time allocation strategy for cognitive tracking in a networked radar system[J]. IEEE Transactions on Signal Processing, 2022, 70: 5833-5847.
[4] ZHANG H W, LIU W J, ZONG B F, et al. An efficient power allocation strategy for maneuvering target tracking in cognitive MIMO radar[J]. IEEE Transactions on Signal Processing, 2021, 69: 1591-1602.
[5] ZHANG H W, LIU W J, XIE J W, et al. Joint subarray selection and power allocation for cognitive target tracking in large-scale MIMO radar networks[J]. IEEE Systems Journal, 2020, 14(2): 2569-2580.
[6] ZHANG H W, LIU W J, FEI T Y. Joint detection threshold adjustment and power allocation strategy for cognitive MIMO radar target tracking[J]. Digital Signal Processing, 2022, 126: 103379.
[7] 余若峰, 杨威, 付耀文, 等. 面向不同雷达任务的认知波形优化综述[J]. 电子学报, 2022, 50(3): 726-752.
YU R F, YANG W, FU Y W, et al. A review on cognitive waveform optimization for different radar missions[J]. Acta Electronica Sinica, 2022, 50(3): 726-752.
[8] 王树亮. 认知雷达跟踪理论及关键技术研究[D]. 长沙: 国防科技大学, 2019.
WANG S L. Research on theory and key technologies of cognitive radar tracking[D]. Changsha: National University of Defense Technology, 2019.
[9] KERSHAW D J, EVANS R J. Optimal waveform selection for tracking systems[J]. IEEE Transactions on Information Theory, 1994, 40(5): 1536-1550.
[10]KERSHAW D J, EVANS R J. Waveform selective probabilistic data association[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(4): 1180-1188.
[11]RAGO C, WILLETT P, BAR-SHALOM Y. Detection-tracking performance with combined waveforms[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(2): 612-624.
[12]NIU R X, WILLETT P, BAR-SHALOM Y. Tracking considerations in selection of radar waveform for range and range-rate measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(2): 467-487.
[13]JIN B, JIU B, SU T, et al. Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for maneuvering target tracking[J]. IET Radar, Sonar & Navigation, 2015, 9(2): 199-209.
[14]HOWARD S D, SUVOROVA S, MORAN W. Waveform libraries for radar tracking applications[C]//2004 International Waveform Diversity & Design Conference. Edinburgh, 2018: 1-5.
[15]王建濤. 面向参数估计的认知雷达自适应发射波形优化技术研究[D]. 长沙: 国防科学技术大学, 2014.
WANG J T. Research on adaptive transmission waveform optimization technology of cognitive radar for parameter estimation[D]. Changsha: National University of Defense Technology, 2014.
[16]WANG J T, QIN Y L, WANG H Q, et al. Dynamic waveform selection for maneuvering target tracking in clutter[J]. IET Radar, Sonar & Navigation, 2013, 7(7): 815-825.
[17]张浩为, 谢军伟, 葛佳昂, 等. 基于波形调度的机动目标跟踪算法[J]. 电子学报, 2019, 47(3): 560-567.
ZHANG H W, XIE J W, GE Jiaang, et al. Maneuvering target tracking based on waveform scheduling[J]. Acta Electronica Sinica, 2019, 47(3): 560-567.
[18]冯翔, 赵占锋, 赵宜楠, 等. 基于矩阵加权多模型融合的认知跟踪波形设计[J]. 哈尔滨工业大学学报, 2018, 50(5): 30-37.
FENG X, ZHAO Z F, ZHAO Y N, et al. Cognitive tracking waveform design based on matrix-weighted multiple model fusion[J]. Journal of Harbin Institute of Technology, 2018, 50(5): 30-37.
[19]JIN B, GUO J, SU B F, et al. Adaptive waveform selection for maneuvering target tracking in cognitive radar[J]. Digital Signal Processing, 2018, 75: 210-221.
[20]聂泽东, 汪圣利. 幅度信息辅助的GM-PHD-UKF弱小多目标跟踪算法[J]. 电光与控制, 2020, 27(12): 41-44.
NIE Z D, WANG S L. An algorithm of weak multi-target tracking based on GM-PHD-UKF with amplitude information[J]. Electronics Optics & Control, 2020, 27(12): 41-44.
[21]彭華甫, 黄高明, 田威, 等. 幅度信息辅助的多机动目标跟踪算法[J]. 海军工程大学学报, 2020, 32(2): 25-30.
PENG H F, HUANG G M, TIAN W, et al. Amplitude-information aided tracking of multiple maneuvering targets[J]. Journal of Naval University of Engineering, 2020, 32(2): 25-30.
[22]吴丽丝. 基于知识的目标跟踪理论与应用研究[D]. 成都: 电子科技大学, 2019.
WU L S. Research on the theory and application of target tracking based on knowledge[D]. Chengdu: University of Electronic Science and Technology of China, 2019.
[23]WILLETT P, NIU R, BAR-SHALOM Y. Integration of Bayes detection with target tracking[J]. IEEE Transactions on Signal Processing, 2001, 49(1): 17-29.
[24]KERSHAW D J, EVANS R J. A contribution to performance prediction for probabilistic data association tracking filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(3): 1143-1148.
[25]FORTMANN T, BAR-SHALOM Y, SCHEFFE M, et al. Detection thresholds for tracking in clutter—a connection between estimation and signal processing[J]. IEEE Transactions on Automatic Control, 1985, 30(3): 221-229.
[26]王云奇. 知识辅助检测跟踪一体化算法研究[D]. 成都: 电子科技大学, 2014.
WANG Y Q. Research on knowledge-aided detection and tracking integrated algorithm[D]. Chengdu: University of Electronic Science and Technology of China, 2014.
[27]SPECHT D F. A general regression neural network[J]. IEEE Transactions on Neural Networks, 1991, 2(6): 568-576.
[28]潘泉, 刘刚, 戴冠中, 等. 联合交互式多模型概率数据关联算法[J]. 航空学报, 1999, 20(3): 234-238.
PAN Q, LIU G, DAI G Z, et al. Combined interacting multiple models probabilistic data association algorithm[J]. Acta Aeronautica et Astronautica Sinica, 1999, 20(3): 234-238.
[29]周宏仁. 机动目标跟踪[M]. 北京: 国防工业出版社, 1991: 15-16, 134-142, 278.
ZHOU H R. Tracking of maneuvering targets[M]. Beijing: National Defense Industry Press, 1991: 15-16, 134-142, 278.
[30]刘瑶. 基于知识辅助的多目标跟踪技术研究[D]. 成都: 电子科技大学, 2013.
LIU Y. Study on knowledge-based multi-target tracking[D]. Chengdu: University of Electronic Science and Technology of China, 2013.
(责任编辑:胡前进)