机场目标可见性性能建模与分析
2023-12-11王志巍
王志巍
(上海民航新时代机场设计研究院有限公司,上海 200335)
0 引 言
塔台是机场建设的重要建筑物之一,也是机场安全、高效运行的核心设施。为保障机场塔台建设满足安全运行需求,我国民航局空管办下发了咨询通告[1],作为机场塔台建设的指导要求,但对于一些参数的计算方法并没有明确。塔台建设的最基本要求是站在塔台的管制员能够通过肉眼感知机场运行的飞行器或车辆的存在,然而目前的规章和规定中,并没有对机场中的目标的可见性模型或评价方法。
张涛[2]研究了塔台通视各项指标,并以某机场为例,分析了不同情景下各指标是否满足塔台通视要求;李娜等[2]研究了国内不同跑道构型、不同塔台位置情况下塔台通视情况,分析了机场塔台位置和高度专项论证所面临困境。
本文结合国内已发布规章、国内外研究成果,建立机场目标可见性性能模型,并通过机场现场实验对比模型的可行性。该模型可用于对现有机场塔台的通视情况进行评估,也可用于对新建或扩建机场塔台选址、高度设计等提供机场可见性数据参考。
1 机场目标可见性问题描述
1.1 问题描述
机场在运行过程中,需要被塔台管制员时刻关注的最重要目标是运动的航空器或车辆。塔台管制员通过眼睛感知航空器或车辆的过程如图1 所示。在机场大气条件下,太阳和天空漫射光把场面运动的航空器或车辆照亮;航空器的影像通过大气传输至管制员眼睛;影像由眼睛传至大脑进行分析和处理,并判断是否察觉或识别出目标。

图1 机场目标可视性示意图
机场目标可视性问题研究是在当前光照和大气条件下,机场塔台上的管制员通过裸眼,能否感知到机场关键点的航空器或车辆。
在机场周边大气环境中,管制员需要依赖眼睛感知航空器或车辆,其感知过程的影响因素包括:管制员的视力;目标航空器或车辆与管制员之间的距离;航空器或车辆的大小、外貌等特性,航空器或车辆与背景环境的颜色、亮度等差异;机场大气对光的透射、衍射、散射等特性。
1.2 目标可见性定义
可见性是指目标物体的可见程度,即从人眼所在位置观察远处目标物体,能观测到的目标物体的清晰程度。人眼的感知过程需要依赖人眼视觉系统,根据人眼对目标细节感知程度的不同,可把目标的可见性分成:察觉、识别和辨认3 种情况。
察觉 目标察觉是通过人眼视觉系统能觉察到机场存在某物体(目标),例如航空器或车辆等物体,而不考虑该物体的类别、类型或型号等信息,即观察者知道存在某物,但无须识别或辨别该物体。
识别 目标识别是通过人眼视觉系统区分一类物体的能力,例如单引擎类通用航空器。
辨识 目标辨识是能通过人眼视觉系统观察辨认出目标是什么类型,例如Cessna172 机型。
在机场目标可见性性能评价时,由于机场运行瞬息万变,时间紧迫,首先是能察觉目标;其次判断目标能否被识别。目标能否被察觉是目标可见性性能分析的首要任务。
1.3 机场目标可见性评估过程
为建立基于人眼的目标感知模型,不失一般性,做如下假设:机场场面的目标一般是指航空器或车辆;所有观察都通过观察者肉眼进行的,观察者的视力正常;假定观察者处于指定的塔台高度,所有目标(例如航空器、车辆)的高度为1 m 左右;如果相同条件下,小型航空器或车辆能够被察觉或识别,则正常运行的更大的航空器或车辆等也可被感知到。
塔台管制员在塔台上通过裸眼确定机场中目标可见性评估过程如下:
(1)确定机场的关键点,把该点作为航空器、车辆等目标所在位置。
(2)指定塔台高度,确定管制员眼睛与关键点的距离。
(3)确定目标对象及其尺寸,即该机场运行时的航空器最小机型或车辆。
(4)确定机场光照环境和目标位置的亮度。
(5)确定目标对比度函数(target contrast,Ctgt),即确定目标对象相对于机场环境的对比度。
(6)建立大气调制传递函数(the atmospheric optical turbulence modulation transfer function,MTF),通过MTF模拟机场大气湍流的散射和折射,大气透射率,大气能见度,大气气溶胶等影响。
(7)确定人眼对比度阈值函数(the human contrast threshold function for discrimination,CTFeye),CTFeye用于表示人眼视觉特征。
(8)计算目标任务性能(Targeting Task Performance,TTP)。
(9)计算察觉和识别的概率,比较和评估目标感知概率是否达到可接受标准(例如,与最小值进行比较)。
2 机场目标可见性模型
本文将参照光电成像技术,建立目标可见性数学模型。
2.1 机场目标鉴别方法
目标的察觉、识别和辨识是基于目标鉴别方法[4]。在相同对比度下,观察者感知目标的能力与其分辨不同频率的模式靶的能力有关。大量实验表明,可通过人眼对目标物体的等效条带的分辨能力,确定眼睛对目标的感知能力,即Johnson 准则。Johnson 以50%概率完成察觉、识别和辨识等目标感知任务所需的等效条带周期数(V50)建立目标可见性感知准则。其中目标等效条带周期数可通过目标分辨力(-cyc/mrad)乘以目标尺寸(mrad)获得。Vollmerhausen 基于TTP准则,给出目标获取任务选择的数据,见表1[5]。

表1 TTP准则中V50取值
塔台管制员对目标物体的可见性概率
式中:V50为达到50%探测概率所需要的等效目标任务周期数,由视觉实验测试得到;V为目标物体的可分辨周期数,该参数与目标的尺寸大小、TTP和距离有关。
一般以临界特征长度作为机场目标航空器或车辆的大小尺寸参考值,临界特征长度可简单表示为目标的正面或侧面横截面积的平方根。机场不同航空器或车辆特征尺寸不相同。在可见度评估时,通常选择较小的尺寸进行评估,如拖车、牵引车等,FAA 推荐的评估测试为Dodge Caravan、Cessna172 等。如果从正面或侧面观察,航空器或车辆可分辨周期数
式中:l、W和h分别为目标物体的外貌特征的长、宽和高;R为目标物体与管制员之间的距离;TTP为目标物体的任务性能。
2.2 目标任务性能
TTP 是Richard 等人基于Johnson 准则提出的[6-7]。把Ctgt与CTFeye围成的区域作为人眼获取到的目标物体的信息,横坐标使用空间频率,在视觉领域定义为cyc/mrad,纵坐标使用对比度表示,如图2 中影响面积所示。
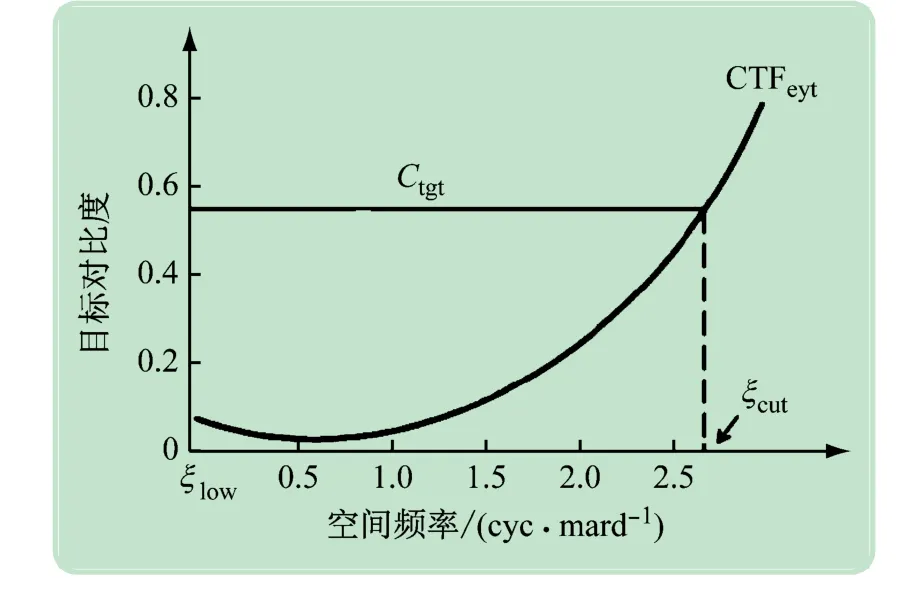
图2 TTP准则示意图
本文采用的TTP模型(包括Ctgt、MTF和CTFeye)
式中:ξlow、ξcut为Ctgt与CTFeye交点横坐标,即积分的起始点和截止点的空间频率。眼睛的横向视角限制导致CTFeye具有空间带通响应,可更好的识别ξlow和ξcut间的空间频率。在该积分方程中,ξlow是Ctgt超过CTFeye的低空间频率,非常接近于零。ξcut是Ctgt超过人CTFeye的高空间频率。
如果目标物体与其背景的对比度减小,会使目标变得模糊不清[8],对于航空器或车辆的影像来说,Ctgt可定义为
式中:δtgt为目标物体亮度(或温度)的标准差;μscene为目标物体周边场景的平均亮度(或温度);Δμ =μtgt-μB为目标物体平均亮度与其背景平均亮度(或温度)的差值。
此外,管制员与目标物体有一定的距离时,目标物体的亮度由于受到大气传输特性的影响发生衰减,导致航空器被管制员眼睛感知的视在亮度变小[9]。通过大气对光线传输的衰减MTF进行讨论。
2.3 人眼对比度阈值函数
目标的可见性就是人眼在特定背景环境下对目标的察觉、识别和辨识过程。大脑中枢对刺激信号的感知和辨识与信号相对于其背景的对比度有关,对比度太大,或者太小,都会降低图像质量[10]。常用人眼对比度阈值函数(CTFeye)来表征人眼对信号感知的灵敏度[11]:
式中:ξ为空间频率;L为目标亮度或为人眼观测视角。
2.4 大气调制传递函数
大气通过影响光线的传播来影响目标物体影像的清晰程度,主要为大气湍流和悬浮颗粒构成的气溶胶,对光线的主要影响为散射、折射和吸收作用[12-13]。目标物体图像光线被大气吸收、散射,引起光线在传播过程中不断衰减,造成图像对比度降低、形状扭曲变形、清晰度下降,影响管制员对目标航空器或车辆感知的准确性,把这两种影响分开考虑,则:
式中:MTFtub为大气湍流调制传递函数;MTFaer为气溶胶调制传递函数。
(1)大气湍流的调制传递函数。MTFtub可分为长曝光湍流MTF和短曝光湍流MTF。一般认为人眼属于短曝光[14](曝光时间小于0.01 s):
(2)气溶胶的传递函数。大气气溶胶效应在目标识别研究中经常被忽视。气溶胶会对光线产生散射作用。MTFaer计算模型[18]
式中:Aα为大气气溶胶的吸收系数;Sα为大气气溶胶的散射系数;ξc为气溶胶的空间频率,ξc≈a/λ;a为大气中主要气溶胶例子半径[16]。
根据ξ与ξc关系,MTFaer分为低频区和高频区,ξ>ξc时为高频区,ξ≤ξc时为低频区。假定气溶胶粒子直径为a=2 μm,波长λ =0.55 μm,则ξc≈3.6 cyc/rad,故MTFaer为高频区。由于高频区,MTFaer与空间频率ξ无关,因此结果取大气透过率数值[17]。
3 仿真实验
以国内某新建4C类机场为例,如图3 所示。

图3 某机场平面简图
机场场面运行时,跑道入口是重点关注区域,设置跑道入口处为目标可见度性能评估的关键位置点。
该机场的塔台位置见图3,距跑道中心线距离476 m,塔台距机场地面的高度为42 m。塔台距关键点位置约1 535 m,即R=1 535 m。
考虑2 种目标物体,具体尺寸见表2。

表2 测试目标尺寸数据 m
3.1 基于模型的仿真结果
根据某日该机场气温条件,背景温度为300 K;目标与背景的温差为30 K,目标对比度为0.4;考虑大气轻微湍流和气溶胶高频率区影响,大气能见度设为10 km。察觉、识别、辨识时选择的V50分别为:4.6、14.5和23.3。假设距离R逐渐变化,根据上述模型,计算结果见表3 和图4。
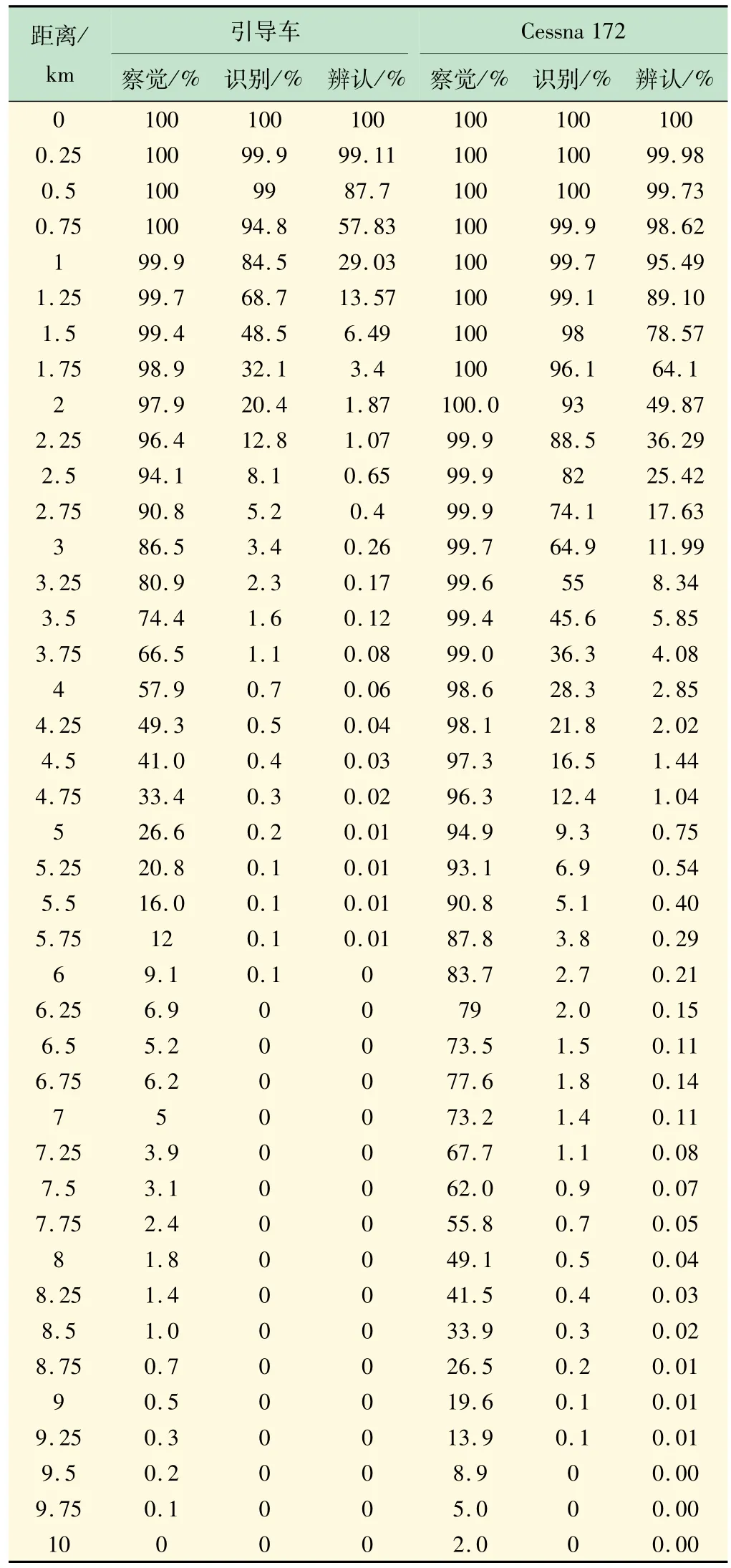
表3 不同目标不同距离处的可见性概率

图4 不同距离和目标可见性预测概率对比
图4 中分别为引导车和Cessna172 飞机的察觉、识别和辨识的概率随距离的变化关系。基于不同距离、不同目标物体的可见性预测概率可知:在物体不变情况下,目标的可见性会随距离增大而下降;在距离不变情况下,人眼对场景目标的察觉比识别容易,识别比察觉容易;并且目标尺寸越大,预测概率越大。
3.2 现场测验设计
为了验证实际管制人员对机场目标的可见性,选择了该机场15 名管制员进行现场测试。被测试人员不知道关键点会放置什么物体,要求通过裸眼观察关键点位置,识别和判断目标。关键点设置3 个场景,依次放置Cessna 172、引导车和无任何目标物体。根据3个场景,测验共进行3 次。
实验过程:针对每次测验,依次让测试人员从塔台指定位置窗口进行观察,每人观察时间为1 s,然后回答调查问卷。
调查问卷包含4 个问题:
问题1 您是否在关键点看到了物体?(选择题,如果选择A 请回答问题2,如果选择B 答卷结束。)( )
A有 B没有
问题2 您看到的是车辆?航空器?(选择题,如果是选择A 请回答问题3,如果选择B 请回答问题4。)( )
A车辆 B航空器
问题3 您看到的是什么车辆?( )
A引导车 B摆渡车 C加油车
问题4 您看到的是什么航空器?( )
A小型航空器 B中型航空器 C大型航空器
上述4 个问题,问题1 用于测试目标是否能够被察觉,问题2 测试目标是否可以被识别,问题3、4 测试目标是否可以被辨认。同时,可根据数学模型仿真计算出目标可见性的概率。对比测试结果和模型仿真结果,见表4。
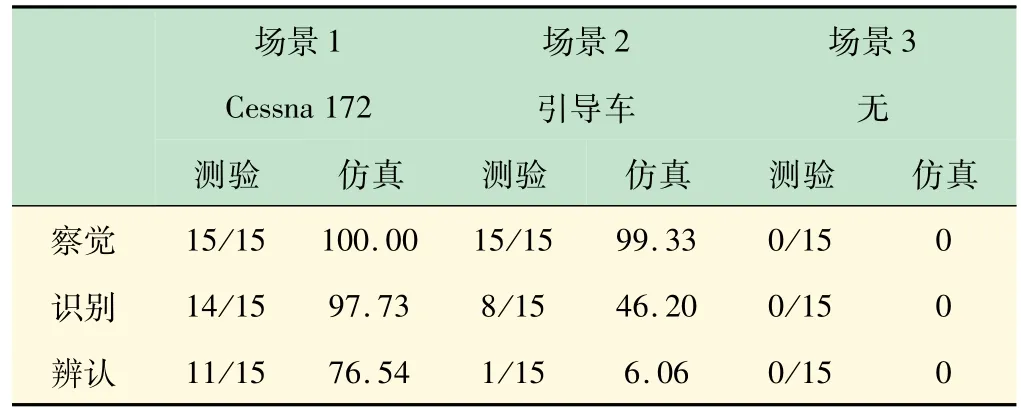
表4 现场测验与仿真结果对比
表4 中“测试”列是通过现场15 人的测试结果。其中数据“*/15”为参与人15 人,选择结果与实际一致的有*人。该测试可从统计结果上初步说明目标的可见性。表4 中的“仿真”列为相同条件下通过数据模型仿真得出的结果。为详细对比2 种方案结果,绘制成雷达图,如图5、6 所示。

图5 Cessna172测试与仿真对比
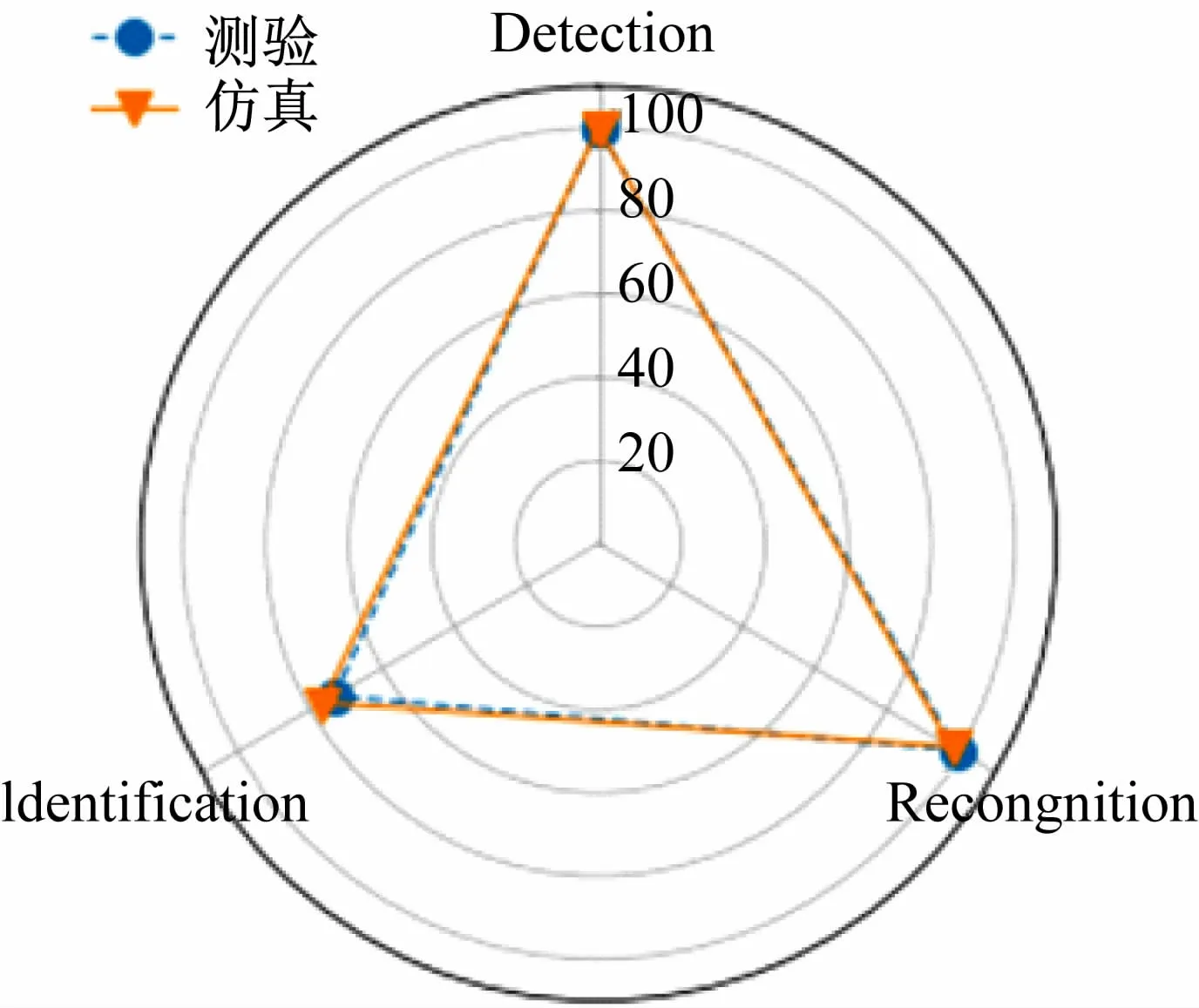
图6 引导车测试与仿真对比
通过测试与仿真对比可知,仿真结果与测试结果在目标可见性趋势上是一致的,表明仿真模型有一定的参考意义,可作为定性的参考和判断。
现场人员测试方法受到物理的距离、大气环境等条件限制,只能测试和评估特定条件下的目标可见性,对机场设计或建设阶段缺少必要条件,无法开展相关测试;测试需要投入大量人力、物力和时间,成本较大;因此测验方法在实际应用中受到较大限制。而仿真可通过调整不同的参数,获得所需条件的任意情况数据,这正是目标可见性数学模型的意义。
4 结 语
本文针对机场场面目标的可见性问题进行详细的分析。分析了机场目标可见性的具体问题,详细定义了机场目标的可见性概念,基于一般性假设,给出了机场目标可见性的评估过程。借鉴光学成像技术,建立了目标可见性模型。论述了目标鉴别方法、目标任务性能、人眼对比度阈值函数、大气环境调制传递函数等影响因素模型建立过程。根据模型完成了对某机场场面目标可见性性能的预测评估。
设计现场测试实验,通过现场测试统计数据与模型仿真预测数据对比发现,2 种方法的结果在目标可见性趋势上具有一致性,表明了该模型的可行性。
由于现场测试数据较少,未来工作需进一步丰富和完善现场测试,进一步论证、修正和完善模型。
