自建纹影成像技术测量超声波波长
2023-12-11瞿嘉宇李沐旭黄河清刘升光
瞿嘉宇, 李沐旭, 黄河清, 辛 程, 刘升光
(1.大连理工大学基础物理国家级实验教学示范中心,辽宁大连 116024;2.青岛理工大学理学院,山东青岛 266520)
0 引 言
超声波是一种频率大于20 kHz,可在气态、液态和固态物质中传播,并含有声压、声阻抗、声功率和声波波长等声学量的机械波。声学量的定量测量是超声无损检测、超声定位、超声悬浮和超声成像等科研实验和工业技术的基础。并且,声学量的定量测量在科学研究、医疗健康和工程制作等方面也有普遍应用。其中,声波波长作为重要的声学量之一,在火箭材料塑化程度检测、溶液浓度测量和太赫兹技术应用等领域具有重要意义[1-3]。目前为止,已有多种常用的定量测量超声波波长的方法,邬佳璐等[3]叙述了基于迈克尔逊干涉原理测量太赫兹辐射波长的实验方法,但是迈克尔逊干涉法的光路搭建复杂且实验仪器精度要求高,同时平台位移量的不稳定性所引入的误差会导致需要对测量结果进行多次修正。彭国华等[4]研究了通过单缝衍射来测量超声波波长,测量结果虽然可通过读取接收装置转动角度进一步计算得出,但波形峰值极小值点选取的主观性和单缝衍射图像的模糊程度都会对超声波波长的测量结果造成较大误差。
纹影成像技术作为一种非接触式、高精度的流场观测方法,可以有效弥补上述超声波波长测量方法的缺点。目前,纹影成像技术已被广泛应用于气体的喷流速度、微型航空发动机尾喷温度场、对流换热系数和爆炸冲击波图像的研究。张津硕等[5]利用纹影图像研究了气体喷流的动态演化规律,于之靖等[6]采用纹影法观测实验室微型涡喷发动机尾喷区域温度场分布,彭力等[7]提出基于密度梯度和温度梯度的可视化纹影图像来测量水平圆管自然对流换热系数,郑星等[8]基于反射式纹影成像原理获取爆炸冲击波的速度信息。可见,纹影成像技术在流场可视化观察和物理量测量方面具有诸多优势,能在非接触条件下获取流场空间分布的纹影图像,并相较于其他观测方法具有更精密的观测结果,可以更好地展现被测流场空间分布随时间演化的诸多细节。
本文提出通过声悬浮装置产生稳定的驻波声场,并结合COMSOL有限元软件数值计算出驻波图像分布均匀、波腹数量多、便于超声波波长的测量的声波频率,并探究该频率下声场对于装置所处的空气域的影响,进而利用自建纹影成像系统获取该频率下的实验驻波图像,对超声波波长进行定量测量研究,分析实验驻波图像和计算驻波图像差异以及测量误差的产生因素。
1 实验原理及装置
1.1 自建纹影成像实验装置
图1 所示为基于纹影成像技术的实验平台,纹影成像技术的基本原理为光在经过折射率不均匀的介质时会发生偏折,偏折部分的图像亮度将会下降,形成阴影[9]。

图1 基于纹影成像技术的实验平台
图2 所示为自建纹影成像光路系统示意图,点光源发出的光束经准直凹面镜反射后会聚成像斑,在相机中形成纹影图像。准直凹面镜前方的区域为待测的非均匀流场。由于流场中折射率具有不均匀性,当光线经过非均匀流场时,会产生偏折。而光线的偏折将进一步导致纹影图像的变化,从而产生具有明暗相间特点的纹影图像[10]。

图2 自建纹影成像光路系统示意图
1.2 声悬浮装置
声悬浮的基本原理是借助2 列同幅同频、反向传播的超声波叠加形成驻波,形成声辐射压力,进而改变空气中气体粒子的空间分布。当声辐射压力与重力平衡时,可实现悬浮。
假设驻波声场初始入射波为正弦形式,则有:
则叠加后所产生的驻波声场为,
声悬浮装置通常采用一定数量的超声波声源,这些声源产生的超声波能够在空间中特定位置叠加形成强度一定的驻波,在物体表面产生与声波传播方向相同的压力,即声辐射压力[11]。声辐射压力具有简谐运动中回复力的物理特性,当物体偏离平衡位置时,会产生回到平衡位置的运动趋势。空间中物体表面所受的声辐射压力可用微分形式表示:
式中:F为声辐射压力;p为声压;ρa为声场中介质密度;u为超声波在介质中的声速;v为声场中介质粒子的运动速率。可以得出,声辐射压力和介质密度成正相关关系。
本实验设计的声悬浮装置为双凹球面。图3 所示为利用COMSOL软件建立的声悬浮装置模型图,声悬浮聚焦点为中心位置,压电陶瓷探头分别放置在上下2 个凹球面上,并呈环状对称分布[12]。

图3 双凹球面的声悬浮装置建模示意图
根据相控聚焦原理[13],建立声源间的相对相位关系,使得装置产生固定的声悬浮聚焦点。其表达式为
式中:t为任意两声源信号相对时延大小;ΔL为两声源信号到声悬浮聚焦点的距离差;u为空气域中声速。若t超过了超声波的最小周期T,由于声源信号提前t与延迟T-t的控制效果一致,可约定t使其始终在超声波的最小周期T之内,故有:
式中,n为自然数。通过控制每个声源信号的时延t,可以实现声源信号传播到声悬浮聚焦点时处于同一相位,从而声场可在声悬浮聚焦点附近实现叠加。
1.3 声场数值模拟
由COMSOL有限元软件数值计算模拟声悬浮装置在不同频率下产生的声场,得出声场的理论驻波图像,从而对声场的特性进行分析。基于实验所用的声悬浮装置具有关于装置主轴对称的特点,可将三维声悬浮装置简化为二维包含主轴的截面进行处理,以达到简化模型计算的目的。
由装置截面所建立的二维模型如图4 所示,模型主体由2 个半径100 mm、扇形角为70°的凹球面组成,其中各个独立的压电陶瓷探头以x-y坐标轴原点中心对称分布。

图4 二维模型图
在数值计算模拟中,选用压力声学模块频域接口和流体流动颗粒追踪接口进行模拟。在接口中,设置平面波辐射边界条件来模拟声悬浮装置的开放边界,设置网格单元大小为极细化得到精密的声场声学量理论图像和空气域中粒子运动轨迹图像,添加声泳辐射力、重力和曳力模拟粒子在声场中的受力情况,并选择空气作为声波的传播介质。
对于超声波声源,利用压力声学模块频域接口对压电陶瓷探头附件的压力进行建模,从而求解声场的Helmholtz方程并进行数值计算。由频域接口方程,可得压电陶瓷探头的总域源
式中:∇为哈密顿算子,pt为声场总声压;ρa为传播介质的密度;qr为偶极域源极矩为超声波的等效波矢,ω =2πf为声波的角频率,f为声波频率;u为声速;kz为空间直角坐标系z轴方向的波矢。由于压电陶瓷探头的域源可视为单极域源,因此偶极域源项qr为0;并且二维模型位于x-y平面,z轴方向的波矢kz也为0。可将式(6)化简为
对于空间坐标系中任意一个压电陶瓷探头的域源Qm可用Dirac函数[14]表示为
式中:rm为任意一个压电陶瓷探头在空间坐标系中的位置,r为空间中任意一点的位置坐标,σm为任意一个压电陶瓷探头域源流出的声场强度。利用Green 函数G(r)求解Helmholtz方程可得:
而模型凹球面在空间中任意一点产生的总声压等于各压电陶瓷探头域源Qm辐射声压之和,即:
通过ρaG和∑Qm的卷积可解出在空间内任意一点产生的总声压
由此,可选择单极点源模拟理想情况下的压电陶瓷探头域源的辐射声压产生情况。
根据装置所处的实验环境温度,设置声速u=343 m/s,选取位于上凹球面装置主轴处的单极点源作为基准信号,通过设定各单极点源间的相对相位关系,以使装置声悬浮聚焦点位于x-y坐标轴原点处,并在空气域中加入固体粒子用以模拟声场中气体粒子的运动轨迹变化规律。最后,通过改变声波频率来研究不同频率下装置中声场的物理特征。
2 实验结果与分析
使用COMSOL有限元软件数值计算模拟声悬浮装置在不同声波频率下产生的声场,得到声场的总声压图像,即计算驻波图像,部分图像如图5 所示。
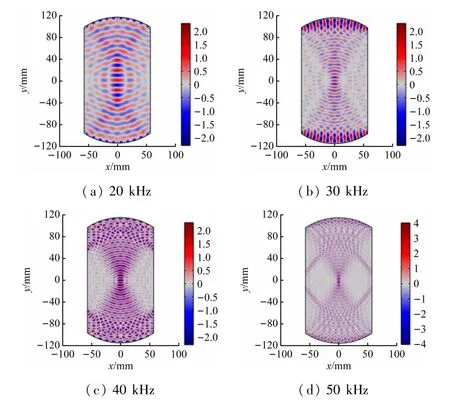
图5 不同频率下有限元计算驻波图(表面总声压:Pa)
通过有限元数值计算模拟分析不同声波频率下声场内声压分布,由图5 可知,当f<40 kHz 时,声场内理论驻波图像在装置主轴附近区域的波腹数量较少,不利于后续对纹影图像中测量位置的选取,会导致实验数据测量点数量减少,增大波长测量结果的误差;当f>40 kHz时,声场内驻波分布更加密集,声悬浮聚焦点附件的声压强度更高,但其余区域声压强度较弱,并且波腹的有效测量区域宽度更为紧窄,边界范围的涨落产生的影响更大,不利于装置驻波纹影图像的观察和测量;而f=40 kHz 时,驻波图像分布均匀、波腹数量多,并且波腹的有效测量区域宽度较宽,便于超声波波长的测量。因此,选择f=40 kHz 时的纹影图像进行观测。
图6 所示为f=40 kHz 时,声场中粒子的运动轨迹随时间τ 演化的图像。从图6 可见,τ =0 时,粒子均匀分布;当声源开始工作后,粒子受声泳辐射力、重力和曳力的作用开始运动;比较τ =0.1 和0.3 s时声场中粒子分布区域,可以发现粒子分布范围明显向声场中波腹位置收拢;在τ =1.5 s 时,粒子分布和驻波图像基本一直,已处于动态平衡状态。
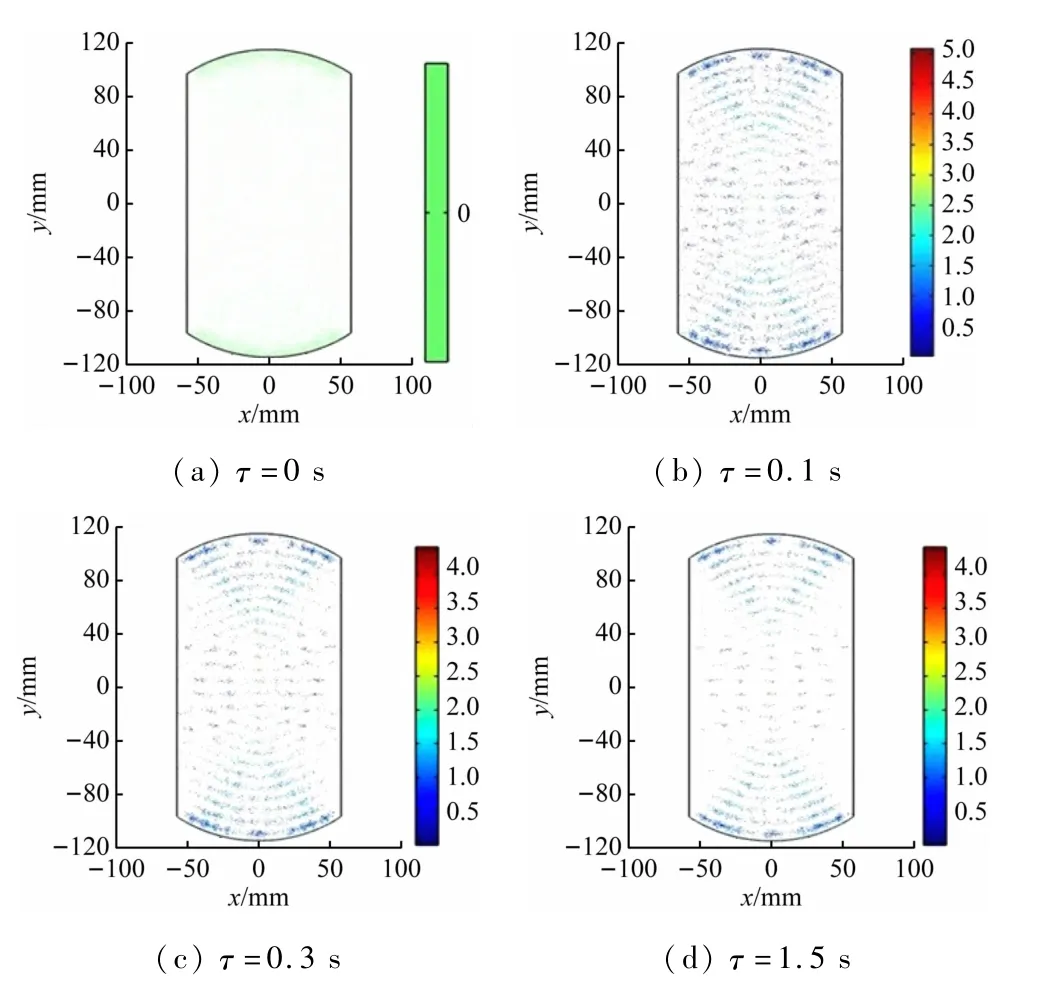
图6 40 kHz频率下粒子运动轨迹
借助固体粒子对声场中气体粒子的模拟,探究声场对于装置所处的空气域的影响。由于空气中u远大于v[15],则超声波声源产生驻波声场所需时间远小于气体粒子处于动态平衡状态所需时间,可认为当气体粒子均匀分布情况未改变时,驻波声场已经形成并稳定。本文研究表明,气体粒子在声泳辐射力、重力和曳力的共同作用下,不再在全空气域内均匀分布,而是逐渐向声场中波腹位置移动,并且声场中声压值高的区域粒子分布更为密集;在声源辐射声压产生1 s后,粒子基本在驻波波腹区域处于动态平衡状态,从而使空气域中介质按照声场驻波模式非均匀分布。这种非均匀介质分布模式使得经过0.6 mm光阑处理的LED光源的光线通过空气域后,受空气域内折射率梯度的影响,能产生可视化声场驻波的纹影图像。
图7 所示为利用自建纹影成像系统获得的f=40 kHz的实验驻波图像和数值计算出的计算驻波图像。相比计算驻波图像,可以发现在装置主轴附近区域图像纹影强烈、细节明显,而边缘区域则纹影较弱。在计算驻波图像中辐射声压高的区域,纹影明显且波腹纹影有效宽度和计算宽度接近;在辐射声压低的区域,纹影偏弱甚至没有。导致这一关系结果的主要因素为空气域中介质按照声场驻波模式非均匀分布。气体粒子由于受声泳辐射力、重力和曳力共同作用,在空气域中的分布情况和声场的辐射声压成正相关关系,并且空气域中局部的有效折射率和该局域内的气体粒子数密度也为正相关关系,又由于光线传播总着向折射率梯度为正的方向弯折,因此纹影产生区域和声场的计算声压数值相对应。

图7 40 kHz频率下驻波图像
图8 所示为经Photoshop 软件处理并经“标尺”的实验驻波图像。首先在实验驻波图像中选取9 个测量点(见图中x1~x9),再借助软件标定测量点的间距长度,通过最小二乘法获得拟合曲线,其中拟合曲线斜率k为纹影图像中波长长度的1/2,最后根据声悬浮装置上下凹球面间距H和图片中上下凹球面间距L的比例关系,即

图8 不同位置下实验测得驻波经软件处理后的图像
可测得超声波波长λ。图9 所示为不同测量位置对应的超声波波长测量结果。当测量位置为波腹上边界时,波长λa=0.844 7 cm;当测量位置为波腹下边界时,波长λb=0.849 9 cm。同在u=343 m/s 和f=40 kHz 环境下的数值计算值λ′=0.857 5 cm 相比,波腹上边界的误差ξa=;波腹下边界的误差ξb=。测量结果之所以会产生涨落,是因为气体粒子在声场声压极大值处的扩散运动会对测量边界位置带来浮动,使得有效测量范围发生变化,从而导致实验驻波图像中级数相同的波腹同主轴的交点到悬浮聚焦点的距离并不相同。

图9 不同测量位置的波节数与超声波波长关系曲线
3 结 语
本文设计并搭建了一套基于纹影成像技术的实验平台,由纹影成像系统和可产生稳定驻波的声悬浮装置构成。通过COMSOL 软件的数值计算模拟与实验测量,结果表明:波腹上边界的误差=1.492 7%;波腹下边界的误差=0.886 3%,测量结果误差较小。该研究成果可对超声波可视化成像,为声学量测量提供图像观测,对超声波的应用有着重要的参考价值。
