达芬奇机器人手术系统在头颈肿瘤外科的应用报道*
2023-12-08蔡永聪周雨秋马霖杰汪旭税春燕孙荣昊熊鹿静刘蕾李超
蔡永聪,周雨秋,马霖杰,汪旭,税春燕,孙荣昊,熊鹿静,刘蕾,李超
610041 成都,四川省肿瘤临床医学研究中心,四川省肿瘤医院·研究所,四川省癌症防治中心,电子科技大学附属肿瘤医院 甲状腺-口腔颌外科(蔡永聪、周雨秋、马霖杰、汪旭、税春燕、孙荣昊、李超);610041 成都,电子科技大学 研究生院(熊鹿静、刘蕾)
自美国FDA 批准了首个应用于头颈外科治疗的机器人手术系统—达芬奇外科机器人,该系统在头颈部各类手术中逐渐得到应用。然而,由于头颈部特殊解剖结构,颈部没有自然腔隙,口腔口咽部腔隙狭小,使其在头颈领域的应用受到限制,目前主要集中应用在甲状腺和口咽肿瘤手术,在欧美等发达国家广泛应用,而在国内开展相对较晚。2010 年,南京军区南京总医院在国内首先开展达芬奇机器人辅助经口双侧扁桃体切除术[1],同年,中山大学肿瘤防治中心开展达芬奇机器人辅助完成口咽癌手术[2]。2014 年,由贺青卿在国内首次开展机器人甲状腺手术[3]。笔者团队在国内较早通过综述介绍了机器人辅助手术在头颈肿瘤外科的临床应用[4],该技术在西部地区开展较晚,直至2022 年,才由我中心在四川省首次开展腋窝入路机器人甲状腺癌根治术、经口达芬奇辅助口咽癌手术。2023 年,我中心在国际上率先完成了机器人辅助腋窝入路颌下腺切除[5]。历经了近10 年的发展,机器人辅助手术在头颈肿瘤中开展越来越多、技术也逐步成熟,并且在我国机器人系统辅助甲状腺手术已达成专家共识[6]。本文就四川省肿瘤医院头颈中心使用达芬奇机器人经不同入路完成甲状腺、口咽、颌下腺、腮腺肿瘤手术进行回顾总结,包括应用单侧腋窝乳晕入路(unilateral axilla-areola,UAA)完成达芬奇辅助甲状腺手术及颌下腺肿瘤切除,初步探讨达芬奇机器人在头颈肿瘤中的应用,这些经验为其临床应用提供实践依据。
1 资料与方法
1.1 病例资料
回顾性分析2022 年 6 月至2023 年7 月在四川省肿瘤医院接受达芬奇机器人(Da Vinci Xi 系统)手术的54 例头颈部肿瘤患者的基本资料,其中男性12 例,女性42 例,年龄24~71 岁。疾病种类包括:甲状腺肿瘤41 例,其中40 例术前评估均为甲状腺乳头状癌,1 例为滤泡性病变,术前彩超和CT 评估肿瘤没有包膜外侵,没有侧颈淋巴结转移;口咽部恶性肿瘤8 例,病理类型均为鳞状细胞癌,其中2 例患者诱导化疗后肿瘤评估为部分缓解以上,1 例为肿瘤放化疗后局部复发,5 例患者肿瘤分期为早期(T1、T2)。所有患者先于直视下行患侧颈淋巴结清扫,再通过机器人辅助完成口咽原发病灶切除。腮腺肿瘤3 例,病理类型2 例为腺淋巴瘤,1 例为多形性腺瘤,肿瘤位置均位于腮腺下极,肿瘤小于4 cm;颌下腺疾病2 例,1 例病理类型为多形性腺瘤,1 例为慢性颌下腺炎保守治疗无效。入路选择包括口腔入路机器人手术(transoral robotic surgery,TORS)8 例、经双侧腋窝和乳晕入路(bilateral axillo-breast approach,BABA)5 例、UAA 38 例,经耳后入路(retroauricular approach,RAA)3 例,具体信息详见表1。

表1 患者基本资料信息Table 1.Basic Information of Patients
1.2 手术方法
1.2.1 UAA 入路甲状腺手术 具体操作按照笔者团队报道的内镜腋窝免充气甲状腺癌手术“六步法”[7]。第一步:体位及切口设计,患者手术体位采取垫肩仰卧位,头偏向健侧约45°,患侧上肢自然外展90°~180°,显露患侧腋窝及患侧乳晕手术切口位置。以腋窝自然第二皱褶切口,在直视下完成切皮和逐层分离至胸大肌外侧缘上端,置入悬吊拉钩显露手术操作腔隙;第二步:直视下建立手术腔,腔体从切口两端分离至胸骨上窝(下界)和甲状腺软骨平面(上界)。建腔完成后在患侧乳晕内侧缘作纵行长度约1.0 cm 第二手术切口作为达芬奇机器人操作臂置入位置,然后对接镜头臂和2 个机械臂;第三步:操作达芬奇机器人完成分离甲状腺上极及其血管,识别并保护喉上神经;第四步:操作达芬奇机器人完成识别和保护上甲状旁腺,识别下甲状旁腺;第五步:操作达芬奇机器人完成暴露、分离和保护喉返神经和下甲状旁腺,气管食管沟中下段钝性分离,清扫周围淋巴组织;第六步:完成甲状腺悬韧带处理及肿瘤整体切除,切除甲状腺峡部、锥体叶、喉前淋巴结,创腔冲洗止血,安置引流管缝合切口。
1.2.2 UAA 入路颌下腺手术 第一步:取垫肩仰卧位,头偏向患侧约45°,患侧上肢自然外展90°,显露患侧腋窝及患侧乳晕手术切口位置。直视下腋窝自然第二皱褶作切口,切开腋窝皮下脂肪层后逐层分离至胸大肌外侧缘上端,置入悬吊拉钩显露手术操作腔隙;第二步:在患侧乳晕内侧缘作纵行长度约1.0 cm 第二手术切口作为达芬奇机器人操作臂trocar 的置入位置;沿乳晕手术切口trocar 植入路径皮下注入膨胀液(采用生理盐水500 mL +罗哌卡因40 mg +肾上腺素1 mg),使用分离棒皮下钝性分离到达手术操作区域置入戳卡接镜头臂和2 个机械臂;第三步:机器人辅助沿胸大肌表面分离皮瓣,越过锁骨,显露胸锁乳突肌后缘。该过程中注意显露保护锁骨上皮神经和颈外静脉;第四步:显露胸锁乳突肌,在肌肉表面分离向头侧,机器人辅助沿颈动脉三角区域继续分离直至二腹肌前后腹,分离暴露患侧颌下腺下缘;第五步:将颌下腺向上牵拉分离颌下腺导管及周围血管后凝闭,分离舌神经和舌下神经,在二腹肌后腹深面分离面动脉近心端,血管夹夹闭后超声刀慢档多点凝闭,即可将下颌下腺深面整体游离;第六步:继续向下牵拉颌下腺,在颌下腺上缘和下颌骨下缘之间钝性分离,分离保护面神经下颌缘支。寻找并显露面动、静脉远心端,超声刀慢档多点凝闭后血管夹夹闭。继续游离下颌下腺上份,完整切除下颌下腺。
1.2.3 RAA 入路腮腺肿瘤手术 第一步:患侧耳后发际内切口,切开皮肤及皮下组织,显露耳大神经,直视下沿胸锁乳突肌表面分离及腮腺表面,置入悬吊拉钩显露手术操作腔隙;第二步:耳后发际切口向下后5 cm 发髻线作为第二切口,作为达芬奇机器人操作臂trocar 的置入位置;使用分离棒皮下钝性分离到达手术操作区域置入戳卡接镜头臂和2 个机械臂;第三步:机器人辅助分离腮腺后缘和下缘,从胸锁乳突肌前缘分离寻找面神经总干,操作过程中注意耳大神经的保护;第四步:沿面神经总干分离颈面干,沿总干顺性分离后保留面神经颈支和下颌缘支;第五步:保护下颌缘支后切除腮腺下极浅叶及肿块。
1.2.4 TORS 口咽肿瘤手术 第一步:患者垫肩充分后仰卧位,戴维斯开口器暴露口咽;第二步trocar接机械臂后安置位置,镜头臂位于中央,钝双击和单击电刀机械臂分别安置于两侧口角;第三步:沿肿瘤外界扩大2.0 cm 完整切除肿瘤,送冰冻切片;第四步:创腔冲洗止血,缝合口咽黏膜。
1.2.5 BABA 入路甲状腺手术 第一步:体位及切口设计:患者垫肩后仰卧位,双侧乳晕及双侧腋窝切口,沿设计隧道路径皮下注射肿胀液(采用生理盐水500 mL +罗哌卡因40 mg +肾上腺素1 mg);第二步:皮下隧道建立,置入trocar,接镜头臂后在镜下观察植入3 个机械臂;第三步:游离皮瓣上至甲状软骨平面,下至胸骨柄上缘,两侧至胸锁乳突肌内侧。沿颈白线分离带状肌暴露甲状腺及气管前淋巴结组织,清扫气管前淋巴结组织;第四步:分离甲状腺外侧被膜后完成分离甲状腺上极及其血管,识别并保护喉上神经,识别和保护上甲状旁腺,识别下甲状旁腺;第五步:完成暴露、分离和保护喉返神经和下甲状旁腺,气管食管沟中下段钝性分离,清扫周围淋巴组织;第六步:完成甲状腺悬韧带处理及肿瘤整体切除,切除甲状腺峡部、锥体叶及喉前淋巴结,创腔冲洗止血,安置引流管缝合切口。
1.3 统计学方法
本研究中颌下腺、腮腺和口腔病例数较少,无法进行统计分析,仅对甲状腺癌患者旁腺保留情况予以统计分析。使用SPSS 26.0 对数据进行统计学分析,正态分布定量资料以均数±标准差(±s)表示,分类资料以频数和百分比表示,组间比较采用χ²检验或Fisher 确切概率法,P < 0.05 认为差异有统计学意义。
2 结 果
54 例患者均顺利完成机器人辅助手术,无中转开放手术,相关手术指标详见表2。在甲状腺手术患者中,1 例UAA 甲状腺癌患者术后8 小时乳晕隧道出血再次内镜下手术止血,1 例腋乳入路甲状腺癌腺叶切除患者术后7 天出现创腔感染,予以冲洗换药、抗炎治疗后愈合良好;3 例患者出现暂时性喉返神经麻痹;6 例甲状腺全切患者中,2 例患者出现术后暂时性甲状旁腺功能减退,1 周后恢复,其余患者术后甲状旁腺值均位于正常范围内;甲状腺腺叶切除患者术后均未发生甲状旁腺功能减退,甲状腺组不同入路和不同切除范围对甲状旁腺的保留情况见表3。表4 显示UAA 和BABA 入路对旁腺保护的差异没有统计学意义(P = 0.330,P = 0.105)。腮腺和颌下腺患者随访3 个月无面瘫、舌尖麻木、口底运动感觉异常等并发症,美观满意度高,疗效满意。口咽肿瘤患者术后没有创面出血、感染等并发症,恢复良好。

表2 不同手术入路患者相关临床数据Table 2.Clinical Data of Patients with Different Surgical Approaches
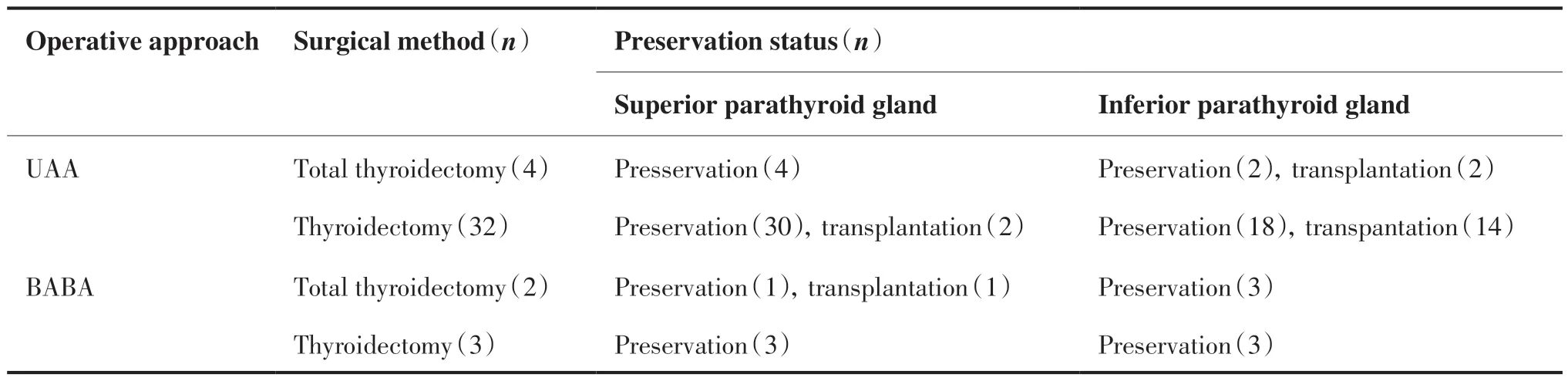
表3 甲状腺组术中甲状旁腺保留情况Table 3.Preservation Status of Parathyroid Glands during Thyroid Surgery

表4 甲状腺组术中甲状旁腺保留情况与手术入路的关系Table 4.Relationship between Parathyroid Gland Preservation and Operative Approach during Thyroid Surgery
3 讨 论
目前,达芬奇机器人手术被广泛应用于甲状腺、口咽、下咽等头颈手术治疗,报道最多的是甲状腺手术,其次为口咽、下咽等部位的手术。手术入路包括TORS、经腋窝入路(transaxillary approach,TAA)、BABA、RAA、经口腔前庭入路(transoral robotic thyroidectomy via vestibular approach, TORTVA),单侧腋窝和双侧乳晕入路(unilateral axilla-bilateral areola,UABA)[8-10]。
2017 年,TAA 入路在韩国首次应用于机器人甲状腺手术,该入路也成为了目前国际上应用最多的机器人甲状腺手术入路[10]。多年的开展及研究证实该入路甲状腺手术是安全可行的技术,在患者满意度、美容方面明显优于传统开放手术[11-12]。笔者团队长期从事腔镜辅助甲状腺手术,在熟练掌握腔镜辅助经腋窝入路甲状腺手术技术要点的基础上,本组病例中大部分甲状腺手术是按照早期报道内镜腋窝免充气甲状腺癌手术“六步法”[7]进行入路改进,采用UAA。较TAA 入路,UAA 入路可以更好地减少机械臂相互干扰,借助机械臂更高的自由度,有助于清扫VIB 淋巴结和完成甲状腺切除。同时把原来置入trocar 位置改为乳晕辅助切口,乳晕切口术后恢复更为隐蔽,减少trocar 处的瘢痕,患者获得更好的满意度。本组病例中有36 例采用UAA入路,其中全切加双侧中央区清扫4 例,腺叶峡叶切除加中央区清扫32 例,平均手术时间全切组为(226.7±37.9)分钟,腺叶组为(124.8±29.7)分钟,和国内外报道类似。和我们前期有关腔镜和开放甲状腺手术研究比较,腺叶切除腔镜组平均时间为130 分钟,开放组平均时间为95 分钟[13],可见机器人辅助和单纯腔镜甲状腺手术时间相似,但长于开放手术,主要是增加建腔时间和机器臂安置时间。基于UAA 入路的较多优势和前期采用腔镜经UAA入路完成颌下腺手术的经验[14],笔者团队也通过该入路在国内率先开展机器人辅助下颌下腺切除术,取得了满意效果,平均手术时间(125.0±7.1)分钟,比同期单纯腔镜组(116 分钟)和开放组(68 分钟)所用时间长,相比于传统开放颌下腺术式,机器人辅助下经腋乳入路下颌下腺切除术手术切口隐蔽,美观效果更好,同时借助机器人高清三维立体视觉,多自由度机械臂,更好地保护面神经、舌神经、舌下神经等重要解剖结构;其次腋乳入路通过颈阔肌皮下隧道到达术区,入路没有重要的血管、神经,不会加重重要组织的损伤,其解剖顺序和颌下腺切除步骤同开放术式类似,不增加手术难度,学习曲线短,外科医生在具备开放术式基础上开展更得心应手[5]。
BABA 机器人甲状腺切除术 (robotic thyroidectomy via BABA,BABA-RT) 2008 年首次在韩国开展[15]。与开放手术相比,BABA-RT 手术时间更长,淋巴结切除数更少,医疗成本更高,但患者满意度和美容效果更好,其余方面并无差异[16]。本组研究中有5 例患者采用BABA-RT 手术,其中全切2 例,腺叶切除3 例。由于开展数量较少,手术时间方面较目前国内外报道的偏长,但术后并发症方面没有明显差异[17-18]。相较于其他入路,BABA 入路优势非常明显,无手术范围限制,尤其是甲状腺全切及胸骨后和喉返神经深面淋巴结的清扫,在侧颈淋巴结清扫时安全有效性更高[19-20]。
自2005 年Mcleod 等[21]首次报道采用达芬奇机器人系统辅助经口会厌囊肿切除手术,便开创了达芬奇机器人在口咽疾病治疗中的应用。研究表明达芬奇机器人减少了手术部位的创伤,患者术后恢复时间较短、吞咽功能损伤小,其疗效优于传统开放手术[22]。相比放化疗,最新研究表明TORS 在局控率、总生存率和无病生存率虽没有显著差异,但可显著改善短期和长期唾液相关生活质量,而放化疗所致唾液和味觉相关生活质量更差,TORS 在器官功能、生活质量和生存率方面均显示出了更优的效果[23-24],使得TORS 成为欧美国家中治疗早期口咽肿瘤常规手段。国内达芬奇机器人口咽手术于2010 年后开展,目前已有多家中心报道这方面的研究,并取得不错的效果[10,25-26]。我院自2022 年开展四川省首例达芬奇TORS 口咽癌手术以来,已完成了8 例手术,患者术后康复理想,满意度高,短期内随访未见特殊并发症,初步疗效满意。
RAA 入路机器人甲状腺手术是由 Terris 等[8]2011 年首次在美国实施,2020 年张彬等[27]在国内首次报道,在手术安全性、肿瘤根治和美容效果方面都取得不错效果。基于前期我中心有开展腔镜经耳后发际线内入路腮腺良性肿瘤切除手术的经验[28],本组病例中采用RAA 入路完成机器人切除腮腺肿瘤,本组病例选择为腮腺良性肿瘤,肿瘤位于腮腺浅叶下极,术后病理为腺淋巴瘤和多形性腺瘤。相对开放手术,机器人手术切口在发际内,术后隐蔽,患者美容效果更佳;同时得益于达芬奇机器人三维高清放大视野,术中可以减少对面神经的分离和牵拉,减少术后面瘫的风险,更好地保护面神经功能,因此RAA 入路机器人手术可以用于腺淋巴瘤、多形性腺瘤、肌上皮瘤等腮腺良性肿瘤治疗。
本研究应用达芬奇机器人在头颈部肿瘤手术领域,不仅包括甲状腺和口咽肿瘤手术,还扩展到经腋乳入路下颌下腺切除术和经耳后入路行腮腺肿瘤切除手术,这些创新的手术入路较传统的开放手术,具有更佳的美容效果和更好的功能保护。但其手术时间会有所增加,主要是增加机器人手术的准备时间,包括隧道的建立,机器臂的安装等,本组研究中腋下建腔平均时间为22.8 分钟,安置机器臂平均时间为9.6 分钟,和其他报道一般腋下通道的平均时间为(20.9±8.4)分钟,放置机械臂的时间平均为(6.8±3.1) 分钟相似,在团队配合建立起来后手术时间也会逐渐缩短[29]。鉴于目前国内外对此报道甚少,没有较多可借鉴的经验,我们更推荐该区域的良性病,希望累及大量相关经验后可以用于早期恶性肿瘤中。
在国内外,达芬奇机器人在头颈部肿瘤手术中展现出了明显的优势,包括三维高清放大视野、器械多角度活动度等特点,与传统开放手术相比,在头颈部肿瘤中具有较大的优势,代表了微创外科的发展方向。未来,随着针对头颈部手术机器人的不断研发,包括单孔机器臂、触觉反馈、显微成像、影像导航、神经监测等更多功能的新型外科机器人,达芬奇机器人在头颈部肿瘤手术中的应用范围将进一步拓宽,这为患者提供了更好的治疗选择,预示着头颈部肿瘤外科领域的未来发展前景。
作者声明:本文全部作者对于研究和撰写的论文出现的不端行为承担相应责任;并承诺论文中涉及的原始图片、数据资料等已按照有关规定保存,可接受核查。
学术不端:本文在初审、返修及出版前均通过中国知网(CNKI)科技期刊学术不端文献检测系统的学术不端检测。
同行评议:经同行专家双盲外审,达到刊发要求。
利益冲突:所有作者均声明不存在利益冲突。
文章版权:本文出版前已与全体作者签署了论文授权书等协议。
