洛阳地铁车辆紧急制动故障分析及应对策略
2023-12-03牛秀蓉
朱 琳,牛秀蓉
(洛阳市轨道交通集团有限责任公司 运营分公司,河南 洛阳 471023)
0 引言
洛阳地铁1号线自试运行以来,在前期人员设备磨合阶段,车辆正线运行过程中,经常发生紧急制动。本文以洛阳地铁车辆紧急制动故障为例,分析紧急制动产生的原因及应对策略。紧急制动设置的目的是保障列车在紧急状况下能够以最大减速度停车,保障行车安全。紧急制动采用纯空气制动,一旦触发紧急制动,直至列车停止才能缓解制动[1]。
洛阳地铁1号线列车采用故障导向安全原则设计,只要出现危及行车安全的操作或者设备故障,制动优先原则,都会触发安全回路,产生制动[2]。电客车的主电路、高压分配、牵引、网络控制、零速、警惕、PIS控制、车门控制等指令均采用高电平有效的设计原则。但是制动指令与之相反,包括常用制动、快速制动、紧急制动、停放制动指令均采用“低电平有效”。即采用失电制动,得电缓解这种控制方式,发生紧急制动列车线失电时,列车将会自动施加紧急制动[3]。
1 车辆制动控制原理
1.1 车辆制动控制
司机控制器的面板上有控制手柄、换向手柄2种可操作机构。控制手柄包含牵引区、0位、制动区、快速制动位;换向手柄有“向后”、“0”、“向前”3个挡位。
车辆在正线运行中,方向手柄发出向前指令,车辆执行该命令。向前运行过程中,列车有惰行、牵引、制动3种状态。牵引制动逻辑判断如表1所示[4]。

表1 牵引制动逻辑判断
洛阳地铁1号线采用架控空气制动系统,制动设备包括动力转向架的电制动和每个转向架的电空制动控制及基础制动装置;基础制动采用踏面制动单元,车辆采用成熟的三点悬挂方式。
空气制动系统按一列车进行系统设计,车与车之间的接口、功能相匹配,编成列车后互不干扰。整个系统设计高度完整,以安全为导向。
列车配备有2套制动系统:一套电制动系统(ED制动),电制动由牵引系统提供;一套电空制动系统(EP制动),电空制动系统为模拟式单管直通摩擦制动系统(见表2)。
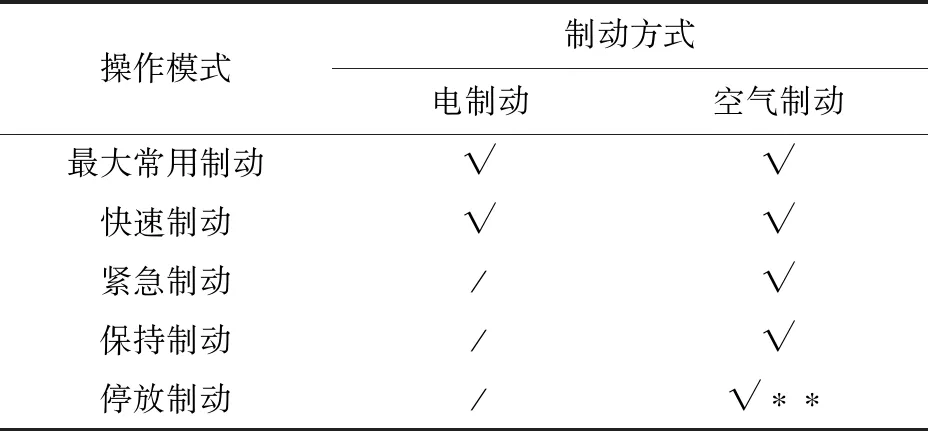
表2 制动方式区别
制动模式分为可恢复制动和不可恢复制动,2种模式之间存在区别。任何时候,操作人员均可缓解可恢复制动;而不可恢复制动一旦施加,直至列车停止才能缓解制动。列车安全回路失电,列车施加紧急制动。紧急制动不可恢复,并予以零速互锁。只有在车辆停止,并且触发紧急制动的条件复位后,安全回路重新得电,才能缓解紧急制动[5]。
1.2 驾驶模式分类
车辆在正线操作模式分为切除ATC信号非限制人工驾驶(NRM)、ATP防护下的手动驾驶(ATP模式)、系统自动驾驶(ATO模式)等模式,驾驶模式分类如表3所示。
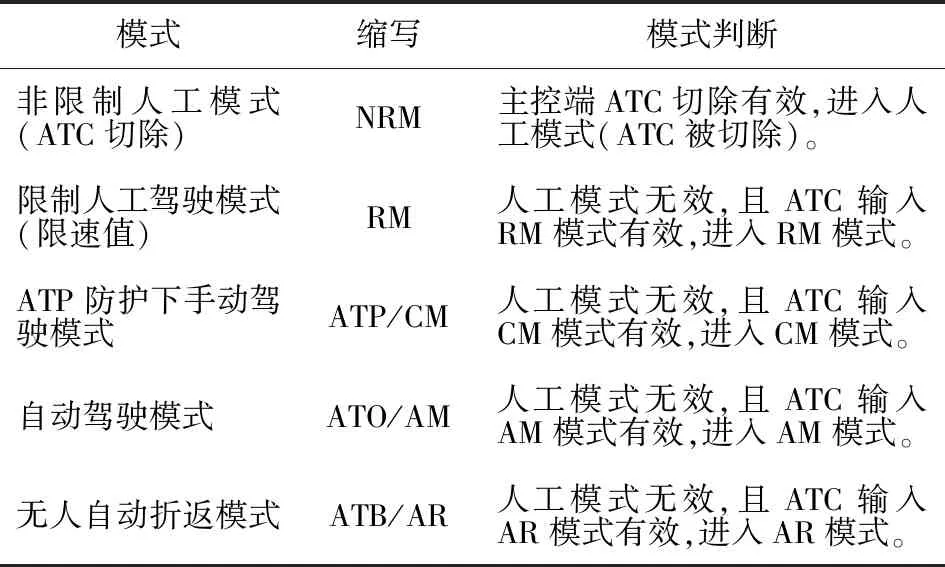
表3 驾驶模式
在距离码ATP系统的基础上安装了ATO系统,列车就可采用手动方式或自动方式进行驾驶。在选择自动驾驶方式时,ATO 系统代替司机操纵,诸如列车启动加速、匀速惰行、制动等基本驾驶功能均能自动进行。不论是由司机手动驾驶还是由ATO系统自动驾驶,ATP系统始终是执行其速度监督和超速防护功能。当列车处于手动驾驶模式,即非AM/AM-H/AR模式下,在牵引工况下,警惕按钮须一直触发,若警惕按钮被释放3 s后,警惕延时继电器(=22- K110)失电,列车将产生紧急制动。
非限制人工驾驶(NRM):切除ATC信号,司机人工驾驶。
手动驾驶(ATP) :在ATP防护下的,司机人工驾驶。
系统自动驾驶(ATO):在ATP防护下,ATO自动驾驶。
1.3 驾驶模式转换说明
1.3.1进入AM驾驶模式
当ATP处于监督模式且ATO设备处于可用状态时,可以激活ATO的自动驾驶功能。当以下条件得到满足时,驾驶室2个ATO启动按钮/指示灯处于闪烁状态提示司机可以启动自动驾驶功能:(1)列车处于CM/ AM模式。(2)列车预设最高模式为AM。(3)方向手柄在向前位,并且牵引/制动手柄在零位。(4)ATO设备工作正常。(5)列车未实施紧急制动。
当ATO启动灯闪烁时,司机确认前方线路条件后,通过同时按压2个ATO启动按钮来启动ATO的自动驾驶。ATO自动驾驶时,ATO灯将保持一直亮灯状态,表示ATO系统处于正常工作状态,同时MMI上将显示当前列车的驾驶模式,列车将由ATO自动驾驶到下一站或下一个红灯信号机处。
车载ATO设备能自动识别ATC监控区,当列车自非ATC监控区进入ATC监控区时,车载设备能立即进入工作状态。
1.3.2退出AM驾驶模式进入CM模式
当不满足自动驾驶条件时,ATO会自动退出,这些条件包括:(1)列车最高预设模式不是ATO模式。(2)方向手柄不向前或者牵引/制动手柄不在零位。(3)列车实施了紧急制动。(4)ATO设备故障。(5)当列车回段,确认转为RM模式时。
司机随时都可以停用自动驾驶功能并且重新获得对列车运行的控制。只要移动一下方向手柄或牵引/制动手柄就可以切除ATO对列车的控制。
列车退出自动驾驶后,新的驾驶模式将显示在MMI上。
1.3.3退出CM驾驶模式进入非限制人工模式
司机操作司机室控制柜中ATC切除旋钮(=43-S105)。司机通过操作司机控制器的方向和牵引制动级位手柄执行非限制人工模式。在牵引工况下,司机手掌一直要放在牵引制动级位手柄,一直要触发警惕按钮(司控器=22-A101,警惕按钮行程开关S00)。
1.4 紧急制动触发条件
下列条件之一时,TCMS将触发紧急制动指令:
(1)ATC车载设备(=43-A01)触发紧急制动。
(2)当列车处于非AM/AM-H/AR模式下,且在牵引工况下,警惕按钮被释放3 s后;警惕延时继电器(=22- K110)失电。
(3)数字量输入输出模块(=24-A104.04)紧急制动信号输出,EGWM紧急制动继电器(=22-K188,5-9触点)得电吸合。
(4)任一端“L_本端紧急停车按钮按下”有效;任意一端紧急停车按钮按下,紧急停车继电器(=22- K109,3-11触点)得电吸合。
(5)主风管压力低于0.55 MPa且无旁路信号,无占有端“总风压可用旁路”有效;总风压力可用继电器(=22-K104,3-11触点)得电吸合。
(6)列车运行过程中(列车非零速),车门未关好且无旁路信号;即在司机室操作端“DXM11(DXM61)通信正常”时,司机室占有端的“列车门关好左”和“列车门关好右”信号无效且“客室车门关好旁路”信号无效;或者主控端“司机室门关好”信号无效且“司机室门关好旁路”信号无效。
(7)列车综合速度超过88 km/h触发紧急制动,低于 86 km/h解除紧急制动;车辆在紧急牵引模式下,紧急牵引速度超速(=22-K145,5-9触点)得电吸合。
(8)拖动模式下速度超过 50 km/h。
(9)运行过程中方向丢失或转换。
(10)紧急制动继电器(=22-K125)、(=22-K127)、(=22-K128)故障。
(11)司机室占有继电器(=22-K152)的3-11触点故障。
(12)22-A01-S11的1-2触点故障。
当紧急制动有效,且满足下列条件之一时,网络系统进行紧急制动提示:
(1)任一DCU“硬线紧急制动反馈”有效。
(2)ATC的MVB数据流中“ATP触发紧急制动”有效。
(3)紧急制动环线有效:1车或6车IO模块通信正常且“紧急停车列车线”有效。
1.5 紧急制动不能缓解原因
根据紧急制动列车线(见图1)[6],可知引起整列电客车制动不能缓解的原因有9点:
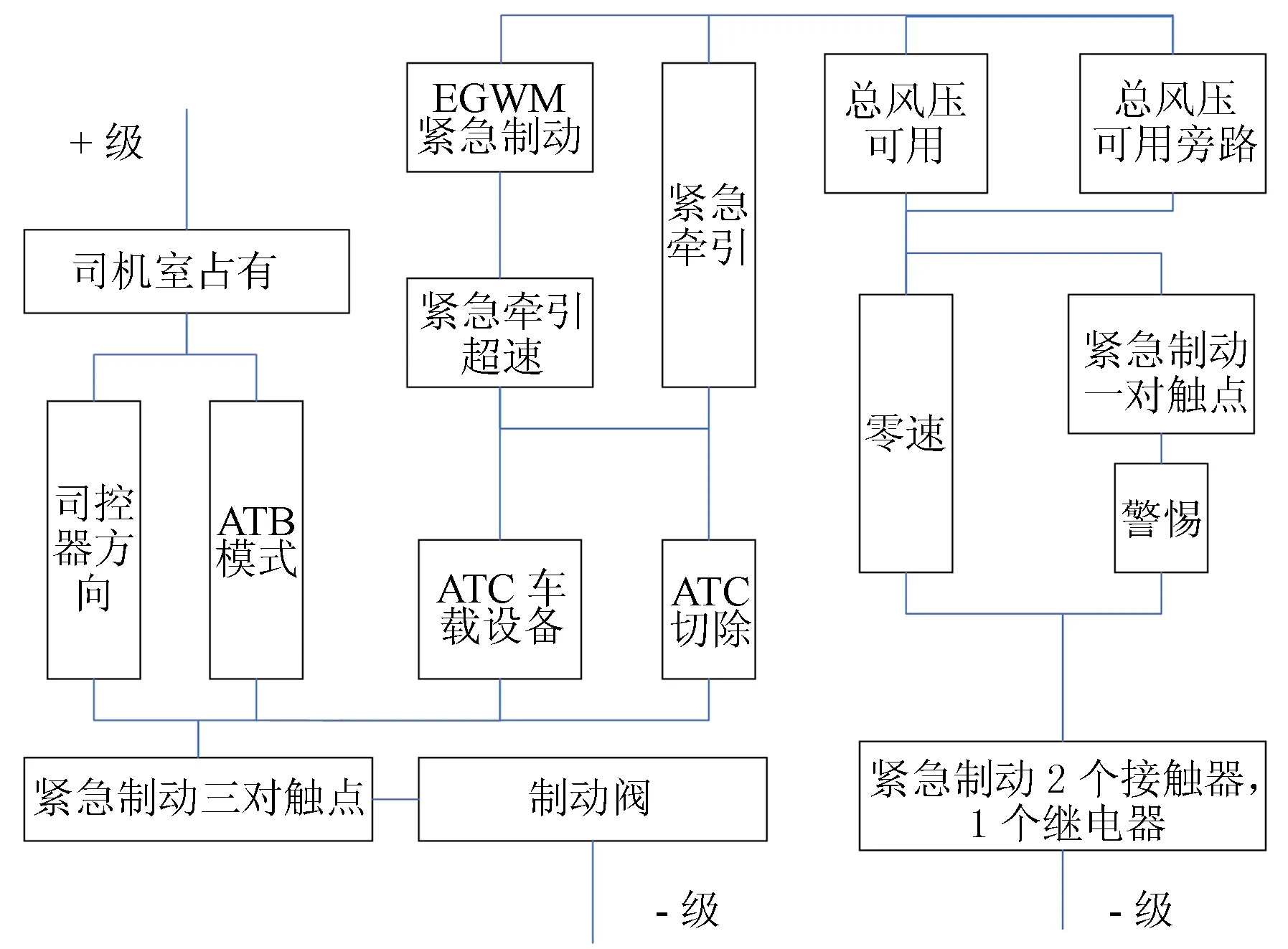
图1 紧急制动控制列车线
(1)司机室占有继电器(=22-K152)的3-11触点故障。
(2)22-A01-S11的1-2触点故障。
(3)ATC车载设备(=43-A01)故障。
(4)紧急停车继电器(=22- K109)的3-11触点故障。
(5)EGWM紧急制动继电器(=22-K188)的5-9触点故障。
(6)紧急牵引超速继电器(=22-K145)的5-9触点故障。
(7)总风压力可用继电器(=27-K104)的3-11触点故障。
(8)零速继电器(=22-K119)的4-14触点故障。
(9)紧急制动继电器(=22-K125)、(=22-K127)、(=22-K128)故障。
2 解决策略
根据洛阳地铁线网故障统计、车辆控制逻辑、紧急制动控制列车线电气原理分析,紧急制动故障主要分三类:一是人为操作触发,二是信号设备触发,三是车辆设备触发[7]。洛阳地铁1号线现场紧急制动故障部分数据如表4所示。针对3种不同的故障提出相应解决策略。

表4 紧急制动部分故障数据统计
2.1 人为操作触发紧急制动
加强司机业务培训,避免因业务不熟练造成方向手柄回零位、列车超速、警惕手柄松开、紧急停车按钮触发的紧急制动。当然司机人为操作触发的紧急制动,在车辆零速后,司机操作司控器能够缓解紧急制动。通过紧急制动是否缓解可以判定是设备故障还是人才操作故障,优先保证列车动车,避免故障列车占用线路,导致救援和大规模晚点。
2.2 信号设备触发紧急制动
第一种情况是ATC设备故障引发的紧急制动且制动无法缓解。列车在ATO模式下,无须按压警惕按钮,但是当ATO模式丢失时,车辆屏幕报“ATP触发紧急制动”、“DCU硬线紧急制动反馈有效”,此时需要人工按压警惕按钮,但是司机默认在ATO模式,此时警惕超4 s未被按下,车辆根据逻辑判断触发紧急制动,在HMI报“警惕按钮DMS断开超时”、“运行中警惕按钮释放时间过长”。列车停稳后,紧急制动不能缓解,若列车切除ATC,列车可以以人工驾驶动车,则排除是车辆设备故障,基本锁定ATC设备故障。
紧急制动命令经由ATP触发,当司机在操作RM按钮使列车进入RM模式时紧急制动缓解故障消除,或者RM模式建立失败后,尝试切除ATC设备,人工驾驶动车,可判断电客车产生紧急制动为ATC车载设备(=43-A01)故障。对信号设备进行升级改造,通过软硬件整改,避免非正常紧急制动现象的发生。
第二种情况是ATC设备的正常逻辑防护。ATC车载系统监控到列车运营状态不对或者司机操作不当时,信号系统会自动触发紧急制动。但是列车停稳后,紧急制动缓解,车辆可正常在信号控车模式下运行,则判断为ATC设备的正常逻辑防护触发的紧急制动。
2.3 车辆设备触发紧急制动
为提升紧急制动控制回路可靠性,可通过提升设备质量或者环路优化技术改造,解决紧急制动环线故障引发的紧急制动无法缓解问题。
在提升设备质量方面,在设计联络阶段加强设备选型把关。正式运营过程中加强关键回路电气设备检查,确保电气元件功能质量,同时跟踪电气元件寿命,定期更换关键电气元件,更换后的电气元件进行测试,质量良好的可以装用在非关键回路中。同时,在车辆设计时加入LCU设备代替部分非关键继电器,降低继电器故障的概率,提高设备可靠性[8]。
在安全回路优化设计方面,开展大旁路技术改造及功能验证,解决紧急制动无法正常缓解或者牵引无法建立的情况,减少正线清客、救援事故[9],大旁路设计如图2所示。主要体现在2个方面:(1)解决当紧急制动接触器 (=22-K127) 和 (=22-K128)的触点 1-2、3-4、5-6 中任意一对触点出现卡分时,将会导致紧急制动指令有效,无法缓解影响车辆动车的故障。增加2个继电器(=22-K129)、(=22-K130),紧急制动备用,通过2个继电器的触点 1-2、3-4、5-6旁路原有紧急制动接触器 (=22-K127) 和 (=22-K128)的触点 1-2、3-4、5-6。(2)解决当司机室占有继电器(=22-K152)中3- 11 触点的无法闭合或者紧急制动回路中其他部分断开时,将导致紧急制动状态一直存在,影响车辆动车的故障[10]。
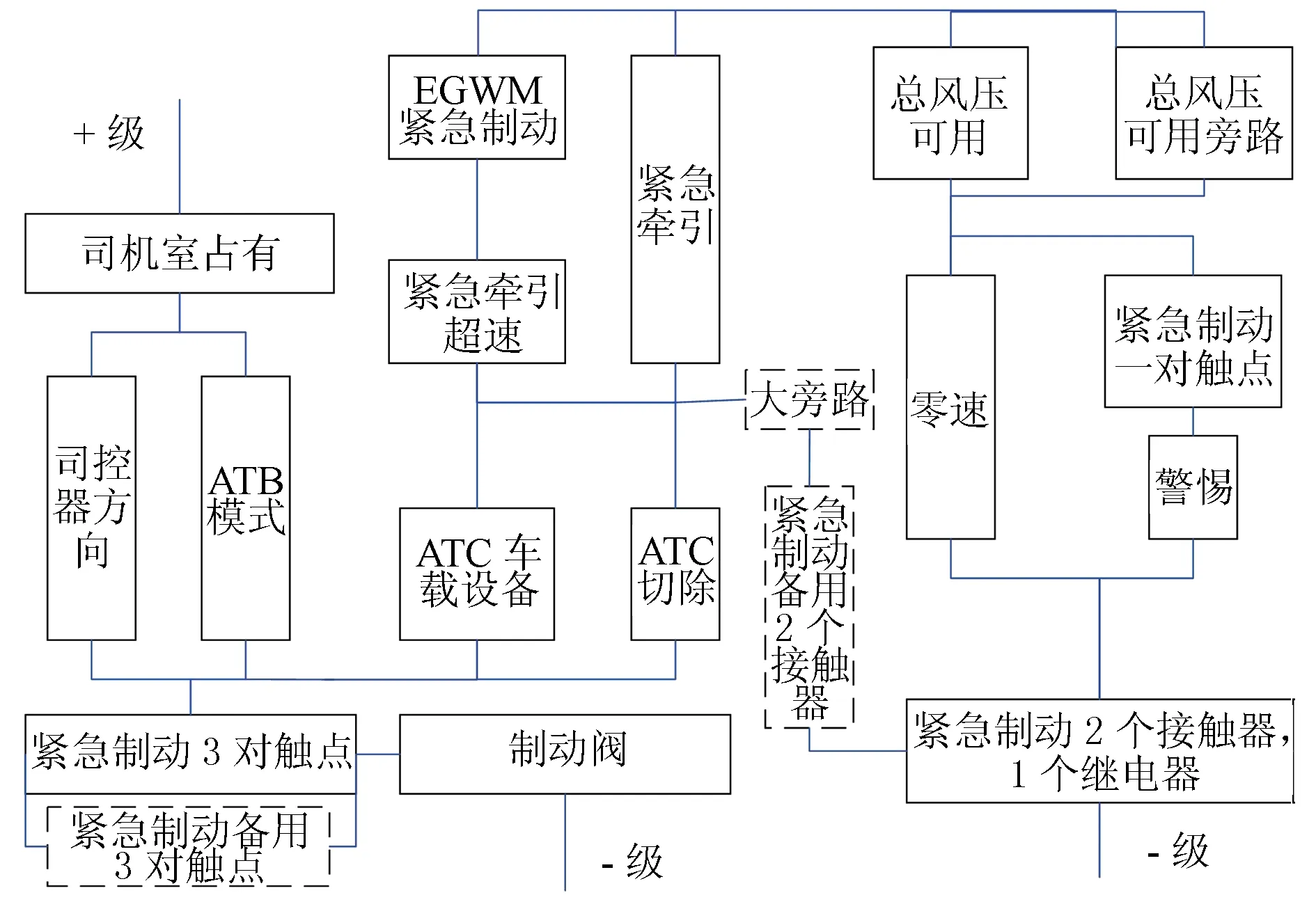
图2 紧急制动不缓解旁路
3 总结
本文以洛阳地铁1号线车辆紧急制动控制回路为研究点,重点探讨了车辆产生紧急制动的原因,对原因类型进行划分,分为人为操作触发、信号设备触发、车辆设备触发三大类,并提出不同故障下的处理措施。通过洛阳地铁1号线紧急制动回路优化和人员技能培训,紧急制动故障从开通初期的一周7次降低到现在的一个月不超过2次。并且通过大旁路优化设计紧急制动控制回路,实现电客车在正线运行时的紧急动车,降低正线救援风险。
