顾及DCB 改正的伪距定位模型及动态性能评估
2023-12-01叶少春唐伟靖徐文兵
叶少春,唐伟靖,徐文兵
( 浙江农林大学环境与资源学院, 杭州 311300 )
0 引言
由于全天候、全天时、全范围等优点,GNSS 得到快速发展和应用. 在GPS 和GLONASS 之后,中国于2020 年6 月完成北斗三号 (BeiDou-3 Navigation Satellite System,BDS-3)卫星部署,实现全球服务[1];欧盟于2021 年12 月完成28 颗Galileo 卫星部署,实现全球服务[2]. 目前,GPS、GLONASS、Galileo、BDS四系统在轨可用卫星达一百多颗,极大地提高用户端卫星可用数,改善卫星空间构型和定位性能[3-4].
当前,最常用的GNSS 定位技术是伪距单点定位(single point positioning,SPP ),其优点是模型简单、不存在整周模糊度,对定位硬件的要求低. 相关学者对多系统SPP 模型及性能进行了评估[5]. 其中,文献[6]以典型城市遮挡环境为例,发现全向遮挡(高度角大于50°)观测环境下,四系统SPP 仍可实现水平5 m 和高程20 m 的定位精度;文献[7]基于手机双频伪距观测量进行差分SPP 模型评估,得到动态定位平面精度约1 m,且双频定位精度较单频明显改善.
以上SPP 模型及性能评估研究主要集中于陆地城市环境,而对于日趋重要的海洋环境下的定位测量分析还比较少. 文献[8]从卫星可见性、载噪比、伪距噪声、多路径效应等方面分析了智能手机海上GNSS观测数据质量,并基于单频伪距进行定位分析,缺少多系统以及单双频SPP 性能的比较. 为此,本文基于无人船(unmanned surface vehicle,USV)实测动态数据,首先分析海上多系统SPP 的定位精度,然后进一步给出单频电离层模型改正和双频消电离层(ionosphere-free,IF)两种模型的性能差异.
1 定位模型
1.1 GNSS 原始伪距观测模型
顾及电离层延迟、对流层延迟和硬件延迟的GNSS 双频伪距观测方程如下[9]:
1.2 GNSS 消电离层组合模型
为消去电离层延迟误差,可利用IF 组合,表达为
为进行实时定位,多采用广播星历进行卫星轨道和钟差计算. 但不同系统卫星钟差的基准存在差异,包含不同伪距或其IF 组合的硬件延迟[10],其中,GPS 基于P1 和P2,Galileo 基于E1 和E5a,BDS 基于B3I,表达为:
进一步展开卫星端的硬件延迟
2 试验分析
本部分介绍了多系统SPP 常用的单频以及双频IF 模型,将利用2 组海上USV 采集的实测动态数据进行模型定位性能分析. 主要从数据采集、数据质量和定位性能三个方面展开.
2.1 数据采集
为进行算法验证,在浙江舟山近海基于USV 进行了数据采集,采集平台如图1 所示. 无人船上搭载了多种传感器,包括GNSS、激光扫描仪、惯性导航系统(inertial navigation system,INS)等. 其中,GNSS 采用测量型天线,华测P5 接收机,可接收GPS 的P1、P2 信号,Galileo 的E1、E5a 信号和BDS 的B1I、B3I 信号. 采集时间为2021-11-15T13:00—16:40 和2021-11-16T10:00—15:00,包含了电离层活跃时段,采集的频率为1 Hz. 实验中,USV 的最大速度可达4 m/s,接近标配的最大航速,可较好验证动态场景的模型稳定性.
2.2 数据质量
本部分从信号信噪比(signal-to-noise ratio,SNR)和伪距多径(multipath,MP)两方面评估USV 采集数据的质量[16-17]. 由于两次实验SNR 和MP 相似,以第一次为例进行分析.
图2 给出所有可视卫星在两个频点上的SNR.可以看出,SNR 大小与高度角呈现明显的正相关,即高度角接近90°时(对应图上天底角0°),SNR 越大,接近50 dB;高度角低至10°时,SNR 越小,约30 dB.整体上看,两个频率上SNR 差异较小,具体统计结果如表1 所示.
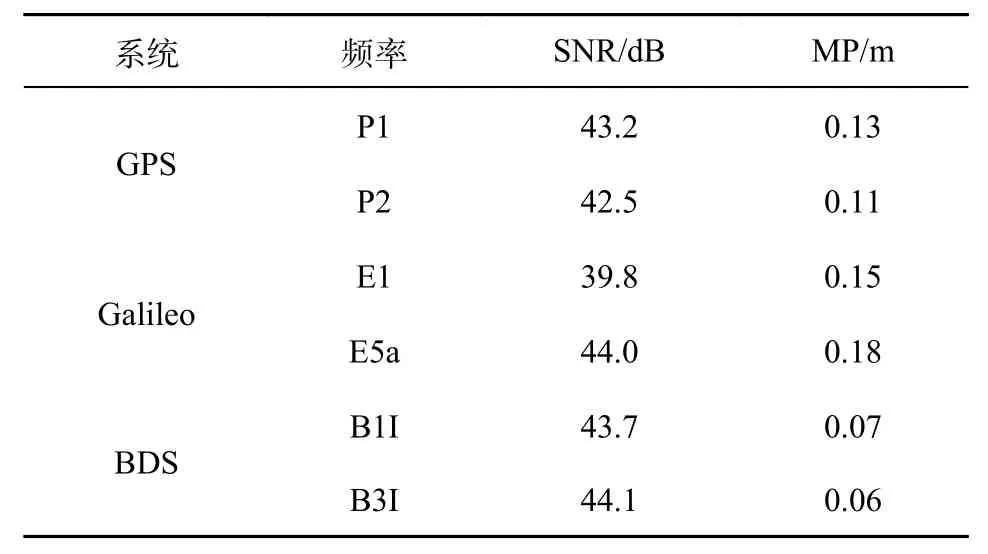
表1 卫星平均SNR 和MP 统计
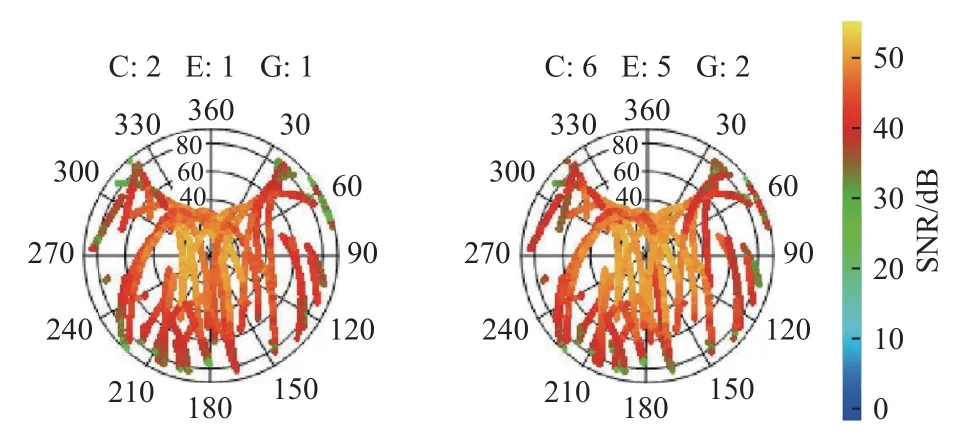
图2 卫星SNR 图
图3 给出所有可视卫星在两个频点上的MP. 可以看出,当高度角大于20°时,MP 比较小,基本在0.1 m以内,表明所用天线具有较好的抗多径性能. 两个频点上具体的三系统卫星平均MP 统计见表1. 可以看出,BDS 最优,GPS 次之,整体上观测质量较优.
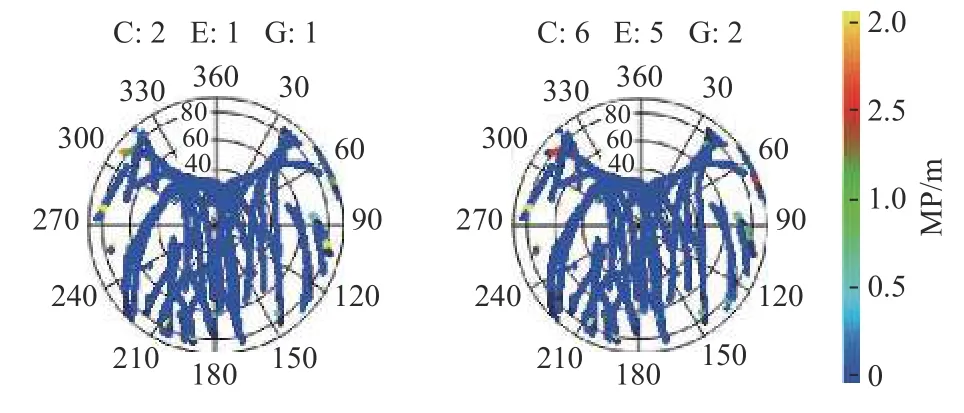
图3 卫星MP 图
2.3 定位性能
为对比单频/IF 组合以及多系统SPP 定位性能,设计以下两类方案:1)单频SPP,电离层采用广播星历的Klobuchar 模型改正;2)双频IF 组合SPP. 两类方案都采用GPS、GPS/Galileo、GPS/BDS、GPS/Galileo/BDS 四种系统组合. 另外,对流层采用Saastamoien模型改正,以高度角进行观测值定权,截止高度角设置为15°. 以IE 软件后处理的实时动态(real-time kinematic,RTK)固定解作为参考,其精度在厘米级,可用于评估SPP 定位性能.
图4~6 给出单频SPP 在东(east,E)方向、北(north,N)方向和天顶(up,U)方向的定位误差,横轴为当地时间. 通过两次实验结果可以看出,E 方向误差基本约–1~0.5 m,N 方向误差约–3~0 m,U 方向误差约–5~3 m. 整体上看,系统组合后高程方向较单GPS 性能更优. 图7 统计GPS、GPS/Galileo、GPS/BDS、GPS/Galileo/BDS四种方案的单频SPP 在平面(Horizontal)和高程方向(Up)的均方根误差 (root mean square error,RMSE). 可以看出,实验一平面精度约1.5 m,U 方向精度约2.3 m;实验二平面精度约1.2 m,U 方向精度约2 m. 两次实验平均平面精度约1.3 m,平均U 方向精度约2.1 m.
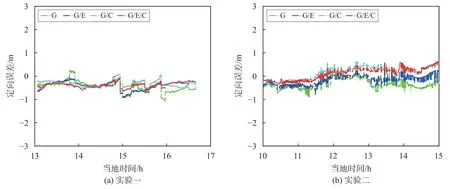
图4 单频SPP E 方向定位误差
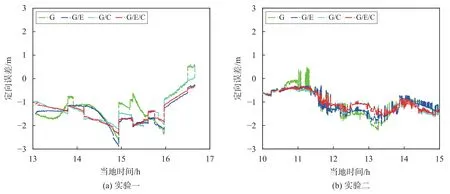
图5 单频SPP N 方向定位误差

图6 单频SPP U 方向定位误差
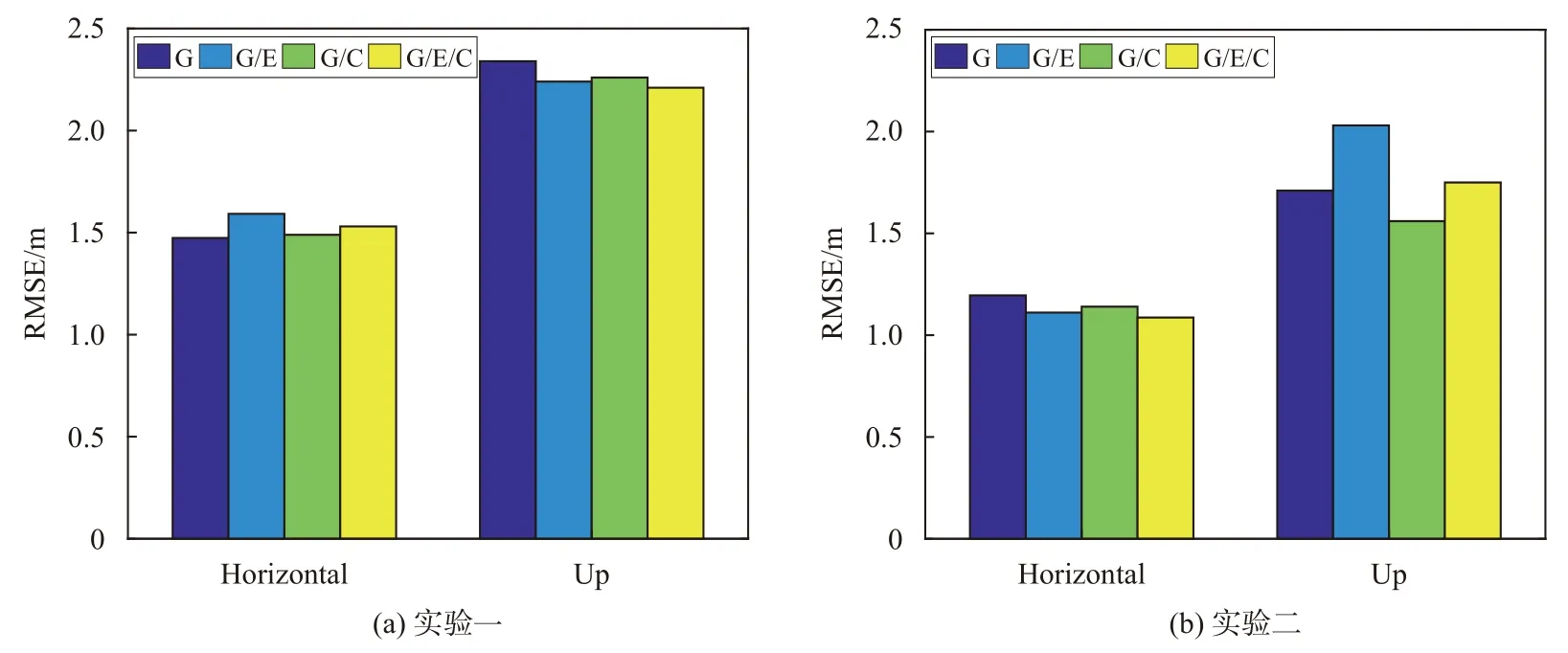
图7 单频SPP 平面和U 方向的RMSE
图8~10 给出IF 组合SPP 在E 方向、N 方向和U 方向的定位误差. 由两次实验结果可知,E 方向和N 方向误差基本约–1~0.5 m,U 方向误差约–1.5~1.5 m.相较于单GPS,GPS/Galileo/BDS 三系统组合后,定位精度明显改善. 图11 统计了GPS、GPS/Galileo、GPS/BDS、GPS/Galileo/BDS 四种方案的IF 组合SPP在平面和U 方向的RMSE. 可以看出,GPS/Galileo、GPS/BDS 组合后,平面和U 方向精度优于0.5 m 和0.8 m. 相较于单GPS,GPS/Galileo/BDS 在平面和U方向精度分别改善35%和40%,平面精度优于0.5 m,U 方向精度优于0.6 m.
为比较IF 组合SPP 和单频SPP 性能,对比图7和图11. 综合两次实验结果可知,单GPS 时,IF 组合SPP 的平面和U 方向精度较单频SPP 的分别改善0.7 m 和1 m;GPS/Galileo 双系统时,分别改善1.0 m和1.5 m;GPS/BDS 双系统时,分别改善0.8 m 和1.3 m;GPS/Galileo/BDS 三系统时,分别改善 0.9 m 和1.5 m.因此,相较于单频进行电离层经验模型改正的SPP,采用IF 组合的SPP 模型具有更优的定位性能. 另外定位误差序列中出现了一些误差较大的点,如图10(b)的12:30 时刻,主要考虑是由于该时刻有较多的伪距多路径误差,是未来进一步研究的一个重点方向.
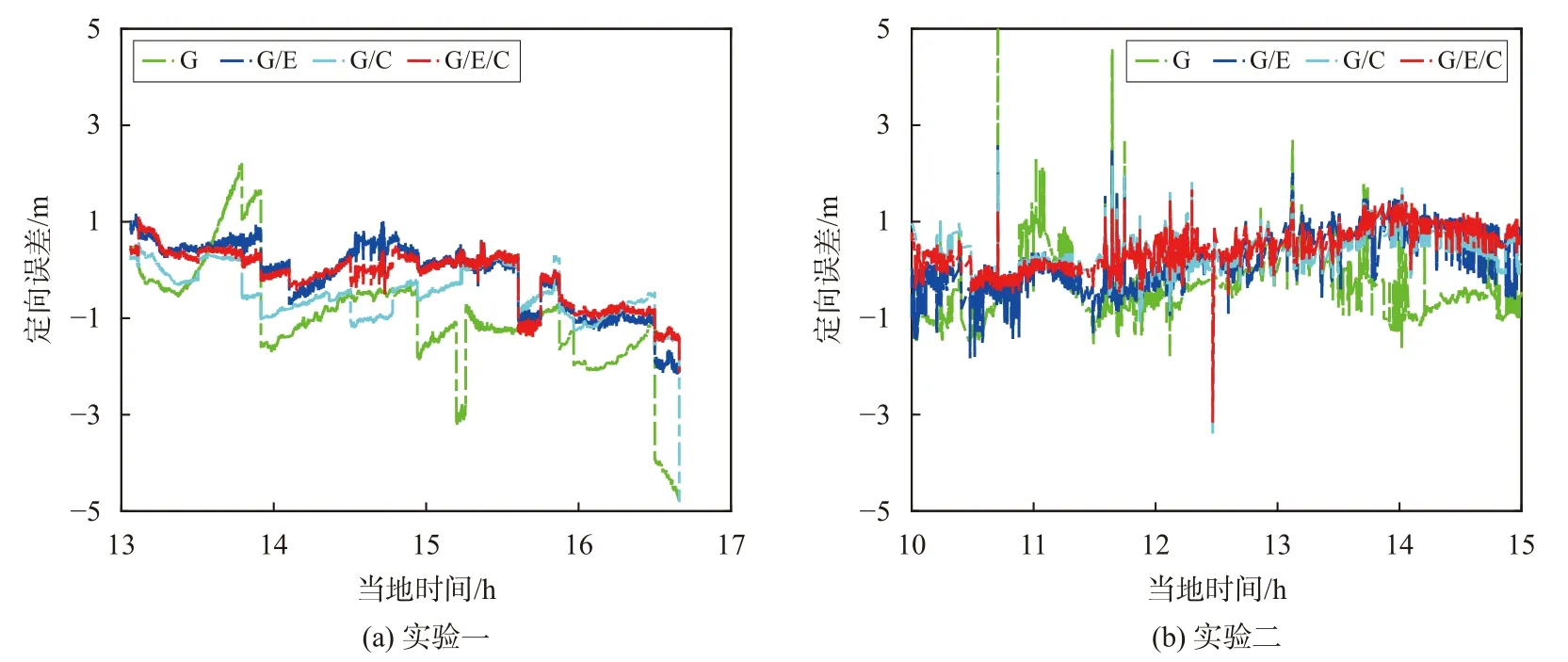
图10 IF 组合SPP U 方向定位误差
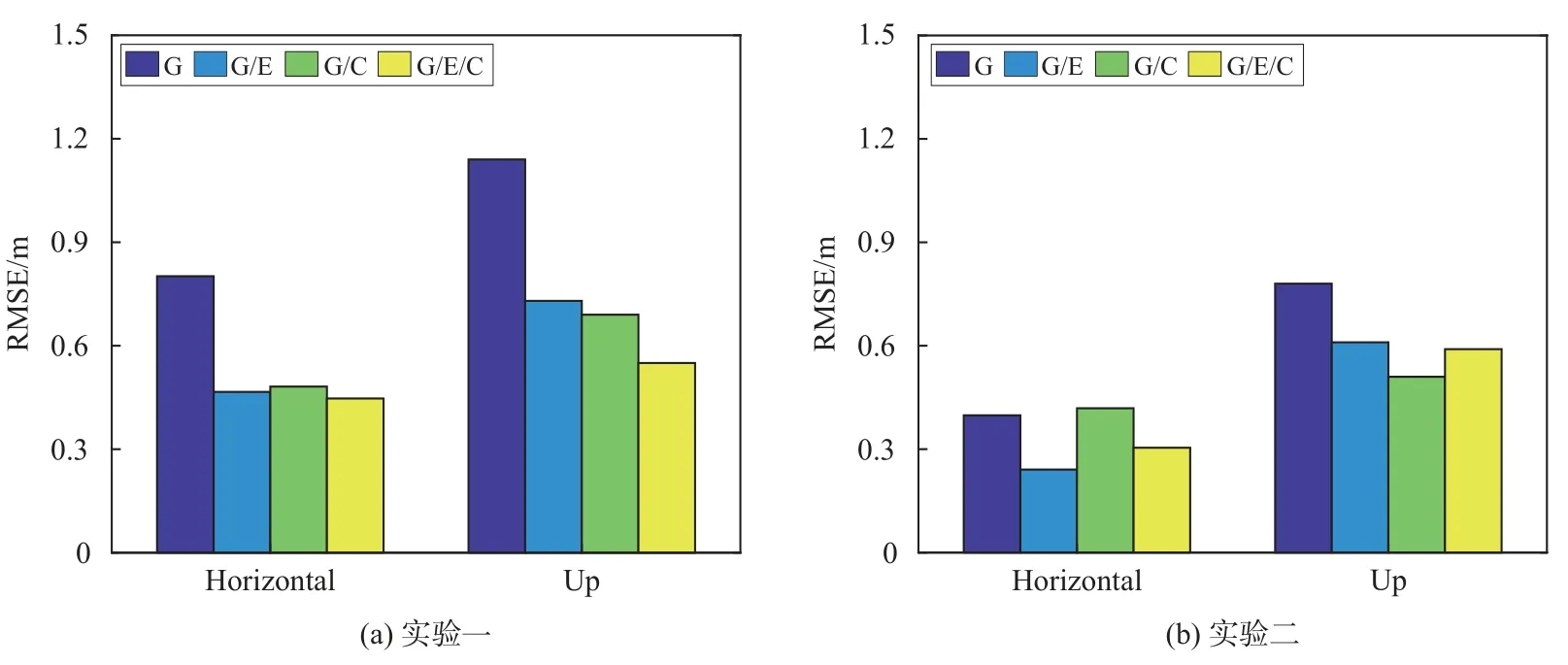
图11 IF 组合SPP 平面和高程方向的RMSE
3 结论
随着Galileo、BDS 全球组网以及海上定位设备可用频率的扩展,多系统、双频SPP 定位性能值得进一步评估. 为此,顾及不同系统伪距硬件延迟改正的基准差异,本文基于二组实测无人船动态数据评估了单频和IF 组合SPP 定位精度. 结果表明:
1) 相比于单一GPS,采用GPS/Galileo、GPS/BDS和GPS/Galileo/BDS 组合后,单频SPP 和IF SPP 定位精度都有所改善. 特别是GPS/Galileo/BDS 组合的IF 组合SPP 平面精度优于0.5 m,U 方向精度优于0.6 m,表明多系统组合在海上定位时具有较优的性能.
2) 相比于单频SPP,在GPS/Galileo、GPS/BDS和GPS/Galileo/BDS 组合后,IF 组合SPP 在平面和U 方向定位精度提高约1.0 m 和1.3 m,表明采用IF 组合的SPP 模型具有更优的定位性能.