海面GNSS-R 模型与时延-多普勒特征研究
2023-12-01万林钰杨鹏举吴瑞曹新亮任新成
万林钰,杨鹏举,吴瑞,曹新亮,任新成
( 延安大学物理与电子信息学院, 陕西 延安 716000 )
0 引言
全球导航卫星系统反射测量(Global Navigation Satellite System-Reflectometry,GNSS-R)是一种无源遥感技术,于1978 年被首次提出.该技术利用卫星导航的反射信号进行遥感,在风速反演[1]、海面测高[2]和海面溢油探测[3]等海洋遥感领域具有重要的研究意义和广阔的应用前景.
自上世纪90 年代中期GPS 得到广泛应用以来,人们开始关注并深入研究GNSS-R 在海洋遥感领域的应用.1988 年,Hall 等[4]首次提出了利用地球表面反射的GNSS 信号进行散射测量的想法.1993 年,Martin-Neira[5]第一次提出了PARIS 的概念,以利用GNSS 反射信号进行海洋测高.1998 年,Garrison等[6]首次在机载实验中证明可利用GPS 反射信号进行风速测量.2002 年,Lowe 等[7]首次在星载高度观测到GNSS 反射信号.2005 年,Gleason 等[8]在UK-DMC卫星上检测到GPS 海洋反射信号,表明利用近地轨道的双基GNSS 反射信号进行海洋遥感是可行的.
相较于国外,国内在GNSS-R 技术领域的研究起步较晚,但取得了显著进展.2006 年,北京航空航天大学率先开展了利用GPS 信号进行海面风场探测的研究[9],并成功研制出GNSS-R 接收机[10].近几年,北京航空航天大学在GNSS 反射信号建模及遥感应用方面进行了大量的研究[11-13].
中国矿业大学构建了星载GNSS-R 海浪有效波高的反演模型[14].武汉大学利用改进的星载GNSS-R卷积神经网络进行海冰探测研究[15].
近年来,各国相继发射GNSS-R 接收卫星,为GNSS-R 技术在海洋领域的应用提供了大量实测数据资源.2014 年,英国萨里卫星技术公司发射了TechDemoSat-1(TDS-1)卫星,搭载GNSS-R 遥感仪器,以完成星载GNSS-R 测量的任务[16].NASA 于2016 年启动了旋风全球卫星导航系统(Cyclone Global Navigation Satellite System,CYGNSS)任务[17],旨在监测飓风变化和热带气旋.欧洲航天局和西班牙国家研究委员会也在这一领域积极展开研究.2019 年,中国自主研制的捕风一号A/B 星发射成功,实现了利用卫星导航信号进行海面风场探测的突破,对台风预警和防灾减灾具有重要意义[18].随着我国自主研制的北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)[19]正式开通运行,利用北斗卫星反射信号进行海洋遥感的应用也越来越多[20-21].
对GNSS 反射信号建模与仿真分析是开展GNSS-R遥感应用研究的重要基础.本文首先分析了GNSS 海面散射的几何模型和GNSS 信号的结构,然后建立了GNSS 反射信号模型,利用经典Z-V 模型研究了海面反射信号的时延一维相关功率和时延-多普勒二维相关功率谱特征,讨论了时延间隔和多普勒频移间隔分别对时延一维相关功率和时延-多普勒图(delay-Doppler map,DDM)波形的影响.
1 GNSS-R 几何模型与信号结构
1.1 GNSS-R 几何模型
GNSS 卫星、海面与接收机的双基雷达几何模型如图1 所示.对于本文中的海面散射问题,使用了固定在反射面上的局部散射坐标系.原点设置在镜面反射点处,z轴位于局部水平面的法线方向.y、o、z平面包括GNSS 卫星、接收机和镜面反射点,正y轴朝向GNSS 卫星,x轴由右手正交法则可得.
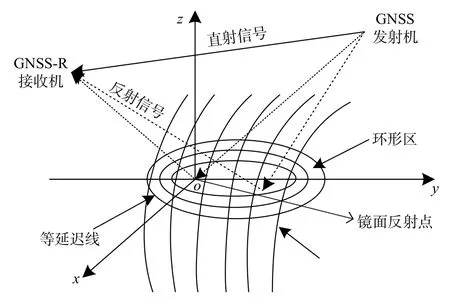
图1 GNSS-R 几何模型图
GNSS 卫星发射的信号经由两条路径到达信号接收机,一是从GNSS 卫星直接到接收机,信号中间传播过程的衰减忽略不计;二是GNSS 卫星到海面再到信号接收机,散射信号与直射信号相比,在时延和多普勒两个维度上均有差异.GNSS 卫星信号两种到达接收机的方式,如图1 所示.
1.2 GNSS 信号结构
以BDS B1I 信号为例对GNSS 信号结构进行说明.BDS B1I 信号与其他GNSS 发射的信号如GPS L1 信号、Galileo E1 信号和GLONASS L1 信号具有相似的特点和相近的调制方式.B1I 信号在北斗二号(BeiDou-2Navigation Satellite System,BDS-2)和北斗三号(BeiDou-3Navigation Satellite System,BDS-3)系统的中圆地球轨道(medium earth orbit,MEO)卫星、倾斜地球同步轨道(inclined geo-synchronous orbit,IGSO)卫星和地球静止轨道(geostationary earth orbit,GEO)卫星上播发,提供公开服务[22].
BDS B1I 信号由“测距码+导航电文”调制在频率为1561.098MHz 的载波上构成,其信号表达式为
式中:上角标i为北斗卫星编号;AB1I为信号振幅;CB1I为信号测距码;DB1I为导航电文;f为B1I 信号的载波频率;φB1I为信号初始相位.
BDS B1I 信号测距码类似于GPS 信号中的扩频码.测距码称为伪随机噪声(pseudo random noise code,PRN)序列,具有确定、周期性和良好的相关特性,BDS 优先使用1~37 号测距码.图2 给出了BDS 4 号卫星测距码的自相关函数.图3 给出了BDS4 号和10 号卫星测距码的互相关函数.图2 和图3说明了BDS B1I 信号测距码具有良好的自相关和互相关特性,高自相关峰值和低互相关峰值可为信号捕获提供很宽的动态范围.
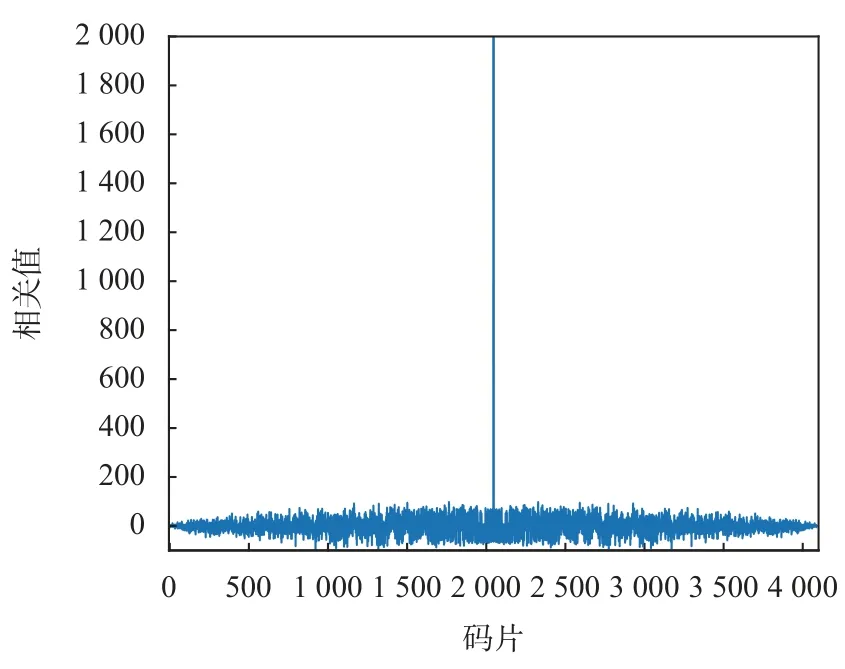
图2 BDS 4 号卫星B1I 信号测距码的自相关函数

图3 BDS 4 号和10 号卫星B1I 信号测距码的互相关函数
2 GNSS 反射信号模型
在实际测量中,GNSS-R 接收机平台接收到的信号来自闪耀区内多个散射点处反射信号的集合.由于反射信号的传播路径不同,不同散射点的时延也不同.GNSS-R 接收机、GNSS 卫星和散射点始终处于相对运动状态,因此不同散射点处的反射信号具有不同的多普勒频率.故不同的时延间隔和多普勒频率间隔对反射信号具有不同的影响,而海面的特征信息包含在不同的反射信号里.
2.1 伍德沃德模糊函数
雷达脉冲压缩技术中,距离和多普勒频率测量的不确定性是一个重要问题.为了分析这种不确定性,可以应用模糊函数这一理论工具.该函数最初由伍德沃德引入用于雷达系统的分析.而在GNSS-R 中,双基雷达方程是其理论基础,因此也可借用伍德沃德模糊函数来进行相关分析.故伍德沃德模糊函数χ(τ,f)可定义为[23]
式中: ∆τ为时延变化值;∆f为多普勒频率变化值;Ti为积分时间;uPRN(·)为PRN 序列.
图4 给出了矩形脉冲的模糊函数,它是实际PRN 模糊函数的理想化.由图4 可知,该函数的最大值出现在原点(τ=f=0)处,值为1.
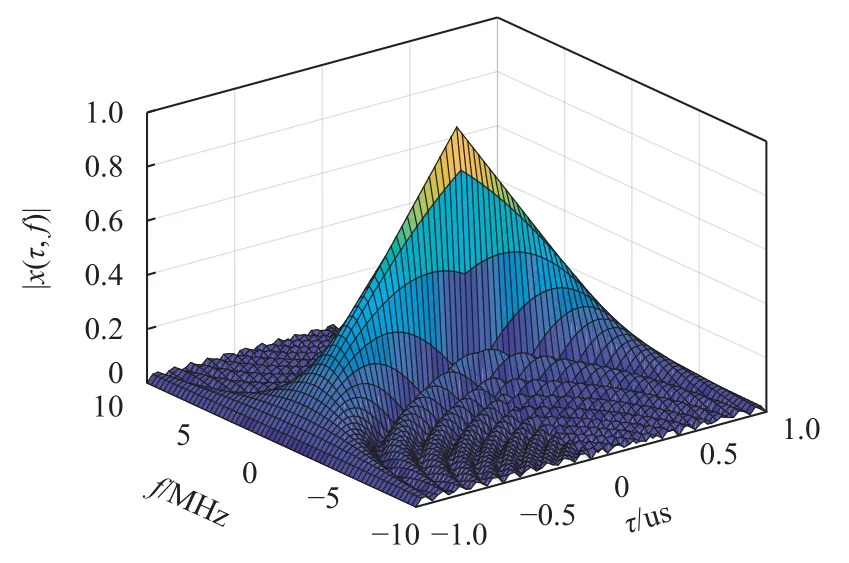
图4 矩形脉冲的模糊函数
沿轴∆τ=0(零延迟)和∆f=0(零多普勒)的窄区域中,模糊函数可以用三角形相关函数Λ(∆τ)及sinc型函数S(∆f)的乘积来近似
Λ函数和S函数分别决定了等环形区和等多普勒区.图4 在零多普勒和零延迟时的切片分别为三角形Λ函数和具有相移的sinc函数.
式中,τc为码片周期.
2.2 时延一维相关功率
Zavorotny 和Voronovich 提出了一个经典理论模型用于描述GNSS 散射信号的功率,该模型基于双基雷达方程,使用基尔霍夫近似的几何光学极限导出了散射信号的相关功率,表达式为[23]
其中,
式中: τ为两条不同路径的时间延迟,即从发射机-散射点-接收机和发射机-镜面反射点-接收机的路径;fd为多普勒频移;Ti为相干积分时间;G是积分区域;D为接收机的天线增益;Λ为测距码的自相关函数;S为多普勒滤波函数;Λ2(∆τ)|S(∆f)|2是上文提到的GNSS-R 双基雷达模糊函数,描述了相关功率谱对时延和多普勒频移的选择性;r0和r分别为发射机、接收机到散射点的距离;ρ为平均海面上的某一散射点;σ0为归一化散射截面(或散射系数),在KA-GO的近似条件下,可表示为
式中:R是菲涅尔反射系数;q是散射向量;P(·)是海面坡度概率密度函数(probability density function,PDF).文献[24]利用Gram-Charlier 分布来描述海面坡度PDF,Gram-Charlier 分布通过修正二维高斯分布,在海面坡度PDF 中引入了偏度(skewness)和峰度(peakedness).GNSS 信号的等效均方坡度(mean square slopes,MSS)[25]:
其中,
式中,U表示海面风速,单位为m/s.
反射信号的时延一维相关功率与海面的风速和风向等物理参数有着密切的关系[23].在接收机高度为682km,风向与入射面夹角为0°的条件下,风速为4~10m/s,间隔为2m/s 的反射信号时延一维相关功率曲线如图5 所示.由图5 可知,在不同风速条件下,反射信号的时延一维相关功率曲线呈现出不同的特征.这种差异可以归因于波形对海面风速的敏感性,随着风速逐渐增大,波形后沿斜率也逐渐变大.
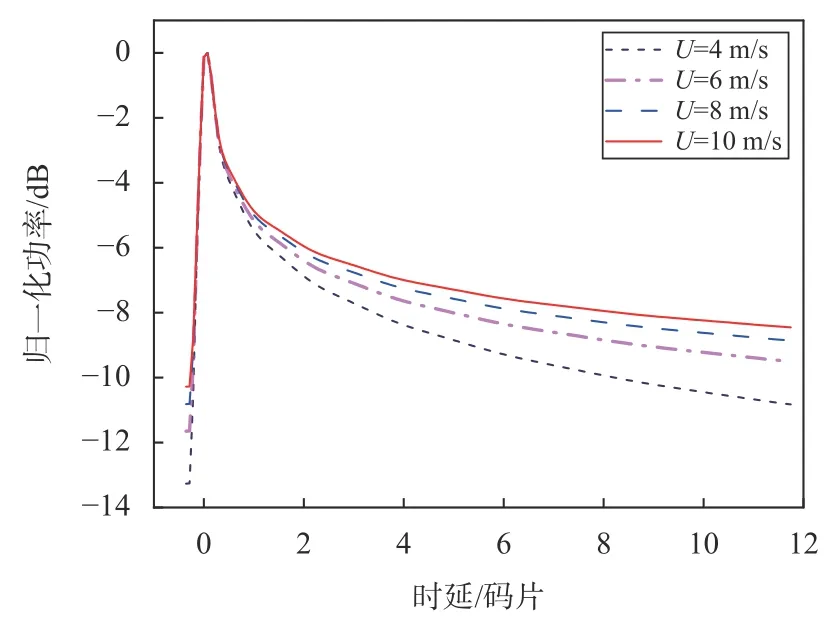
图5 时延一维相关功率曲线
2.3 时延-多普勒二维相关功率
式(6)可表示为二维卷积形式
式(12)可通过二维傅里叶变换加速计算.在式(12)中,χ2(τ,fd)是模糊函数,χ可理解为来自单个延迟-多普勒单元的散射信号的脉冲响应.Σ由式(13)给出
GNSS 反射信号的时延-多普勒二维相关功率可视为海面闪耀区内散射信号相关功率在时延和多普勒两个维度上的映射,也称为DDM.由式(12)可知,DDM 可由(τ,fd)域上的二维卷积完全确定,故只需在时延-多普勒坐标系下考虑式(12),而无需关注模拟的物理表面的实际大小.
为了得到DDM,先进行一个变量变换,将其从空间域(x,y)转换到时延-多普勒域(τ,fd)
式(13)中的表面微分d2ρ变为
式中: dfd,xy和dτxy为新积分变量的微分;|J|为式(14)中变量变换的雅可比矩阵的行列式.雅可比矩阵说明了物理空间与延迟-多普勒空间的对应关系.
等时延线和等多普勒线将反射面划分成了大量的反射面元,而时延间隔和多普勒间隔的大小决定了这些反射面元的大小,如图6 所示.

图6 反射面单元与时延-多普勒单元映射图
GNSS 反射信号由于传播特性和海面粗糙性,总体表现为信号幅度的衰减,且相对于直射信号,反射信号有不同的时延和多普勒频移.GNSS 海面反射信号是不同海面散射单元的散射信号共同作用的结果.利用等延迟线和等多普勒线将海面散射单元划分成一个个小反射面元,这些小面元在时延和多普勒两个维度上的功率叠加起来即是反射信号的DDM.反射面单元与时延-多普勒单元的映射关系如图6 所示.
3 结果与分析
为分析时延间隔对海面反射面元的影响,图7 仿真了在多普勒频移一定时,时延间隔分别为0.25、0.50 和1.0 个码片的反射信号海面散射单元的划分区域显示.在图7 中,接收机高度为682km,GNSS卫星高度角为60°,风速为10m/s,多普勒间隔固定为500Hz.

图7 不同时延间隔的海面散射单元划分
当多普勒频移一定时,时延间隔越小,等延迟线和等多普勒线相交的反射面面元越小.由图7 可知,整个环形区的宽度及环的厚度取决于时间延迟τ和双基几何结构,而环形区的宽度携带了有关海浪坡度或近海面风的信息.
当时延保持不变时,多普勒频移间隔的大小对于DDM 波形的仿真结果有一定影响.图8 展示了两种情况下的评估结果.仿真中涉及到的主要输入参数如表1 所示.

表1 主要输入参数
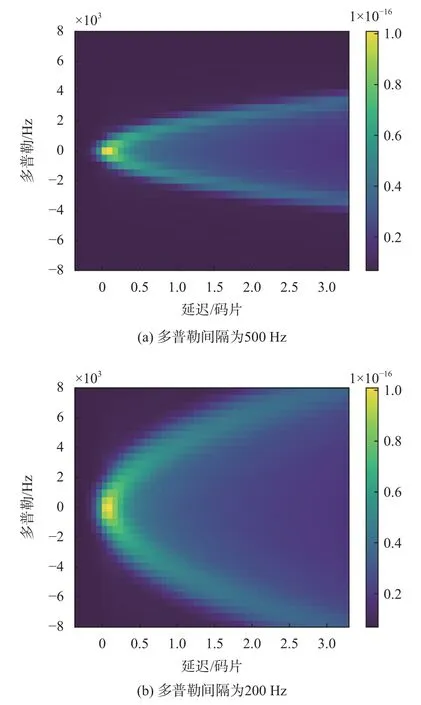
图8 不同多普勒间隔下的DDM 波形
图8 给出了不同多普勒间隔下的DDM 波形.由图8 可知,二维时延-多普勒相关功率呈经典的“马蹄”状分布.其中图8(a)是多普勒间隔为500Hz 时的DDM 波形.图8(b)的多普勒间隔为200Hz,对比图8(a)和图8(b)可知,多普勒频移间隔越小,仿真得到的DDM 波形分辨率越高.由图8 可以发现,DDM最大相关功率位于时延和多普勒为零处,也就是镜面反射点的位置.镜面反射点是发射机-地球表面-接收机之间距离最短的点,是测量和建模的主要参考点.通过对比图4 和图8 可以发现,DDM 具有很强的中心瓣和较弱的旁瓣,恰好反映了GNSS 信号的伍德沃德模糊函数的结构特征.
DDM 波形中的每一个单元表示GNSS-R 海面反射信号在特定时延和多普勒频移下的强度,或者说相关功率.通过观察DDM 波形,可以得到反射信号在时延和多普勒频率上的功率分布情况.DDM 对于分析海面目标的散射特性具有重要意义,在GNSS-R的研究和应用中起着重要作用.
4 结束语
本文在经典Z-V 模型的基础上,研究了GNSS海面反射信号特性,所使用的建模方法不仅可以仿真时延一维相关功率,而且可以模拟反射信号的DDM.讨论了不同风速下的相关功率变化情况,数值结果表明,时延一维相关功率对风速具有敏感性.研究了时延间隔对海面散射单元的影响,结果表明,时延间隔越大,等延迟线和等多普勒线相交的区域越大.分析了多普勒间隔对时延-多普勒二维相关功率即DDM的影响,结果表明,多普勒间隔越小,DDM分辨率越高,海面散射单元划分越小,二维相关功率的计算越精确.且在时延间隔不变的情况下,多普勒间隔变小,海面散射区域尾部逐渐展宽.因经典的Z-V 模型中海面散射模型基于物理光学的几何光学极限,故该模型不适用于低掠入射角场景.为此,后续将基于更合理的海面散射模型开展海面GNSS 散射信号建模及应用研究.