LSTM 辅助车载GNSS/INS 组合导航算法及性能分析
2023-12-01刘东亮成芳沈朋礼李晓婉呼宇航
刘东亮,成芳,沈朋礼,李晓婉,呼宇航
( 1. 中国科学院国家授时中心, 西安 710600;2. 中国科学院精密导航定位与定时技术重点实验室, 西安 710600;3. 中国科学院大学, 北京 100049 )
0 引言
近年来,无人驾驶、智慧农业等领域快速发展,其对导航与位置服务需求日益明显,例如定位的可靠性、稳定性、连续性、服务范围等.GNSS 和惯性导航系统(inertial navigation system,INS)是提供定位服务的两种主流系统.GNSS 能够全天候实时提供定位、导航和授时(positioning,navigation and timing,PNT)服务.但是,GNSS 卫星信号穿透能力差,在城市峡谷、隧道等遮挡环境下,会出现可见星数目降低及信号丢失等现象,从而导致定位精度出现严重偏差甚至难以定位.INS 无须依赖外部信息也不受外界干扰,具有完全自主、抗干扰能力和实时性强、输出参数全面、频率高等优点,但其本质采用航位推算技术从而存在着误差随时间不断累积的问题,无法满足长时间导航需求.GNSS 与INS 具有天然的互补性,GNSS/INS 组合导航系统既继承了GNSS 全天候、高性能优势,又具备INS 输出新息全面、强抗干扰能力和高数据更新率的优势,可大幅提升位置服务能力[1].
遮挡环境导致GNSS 信号失锁时,GNSS/INS 组合导航系统退化为INS 提供导航定位,随着GNSS信号失锁时间增加,定位精度会迅速下降,为解决这一问题,可设计神经网络模块来辅助GNSS/INS 组合导航系统,抑制INS 单独定位的误差发散[2].部分学者提出使用径向基函数(radial basis function,RBF)神经网络辅助GNSS/INS 组合导航系统建模,相比INS 导航显示出稳定准确的结果[3-6].此外一些学者使用反向传播(back propagation,BP)神经网络来辅助GNSS/INS 组合导航系统,相比INS 导航精度明显提升[7-8].闫世霖等[9]使用循环神经网络(rerrent neural network,RNN)预测INS 的位置和速度误差,采用无人机试验数据证明了RNN 算法相比INS,导航精度平均提升了77%.使用BP、RBF 神经网络辅助GNSS/INS 组合导航算法都试图通过使用当前的INS 输出来预测INS 误差来改善GNSS 中断期间的导航性能.其主要缺点是处理时间序列数据时,它们无法存储更多过去的车辆动态信息,RNN 虽然可以存储车辆动态信息,但无法捕捉长时间影响且存在梯度爆炸和消失问题.在GNSS 信号长期失锁的情况下,上述三种神经网络辅助算法都可能无法提供准确和稳定的导航结果.长短期记忆(long short-term memory,LSTM)神经网络是RNN 的改进模型,引入了存储器单元,借助门控单元解决了梯度爆炸和消失,可以捕捉长时间影响,具有执行高度非线性动态映射和存储过去信息的能力.为此本文对车载环境下LSTM 辅助GNSS/INS 组合导航算法进行研究,解决GNSS 信号失锁较长时GNSS/INS 组合导航系统定位不可靠问题.
1 GNSS/INS 松组合系统
1.1 卡尔曼滤波
卡尔曼滤波(Kalman filtering,KF)算法通过系统的状态模型和观测模型递推状态向量的估计值.具有存储量小、效率高的优势.离散化后表示为
式中:Xk为k时刻n维状态向量;Zk为k时刻m维观测向量;Φk/k-1为n×n维状态转移矩阵;Γk/k-1为状态噪声分配矩阵;Hk为m×n维观测矩阵;Wk-1、Vk分别为k-1时刻系统噪声矩阵和k时刻观测噪声矩阵.通常假定观测独立,Wk-1与Vk为互不相关的零均值高斯白噪声.KF 滤波包括两个步骤:
1)时间更新
2)观测更新
传统KF 用于求解高斯分布的线性系统,组合系统为非线性系统,可进行局部线性化处理转换为线性系统来处理.
1.2 GNSS/INS 松组合算法设计
GNSS/INS 松组合流程如图1 所示,首先对INS进行初始对准,对准后经过机械编排可获得位置速度姿态信息,GNSS 通过解算获得位置、多普勒测速获得速度信息,将两者通过EKF 融合得到INS 误差,修正通过INS 编排获得的导航信息并将其作为最终结果输出,同时将估计的惯性测量单元(inertial measurement unit,IMU)零偏误差反馈给IMU 来修正IMU 误差.
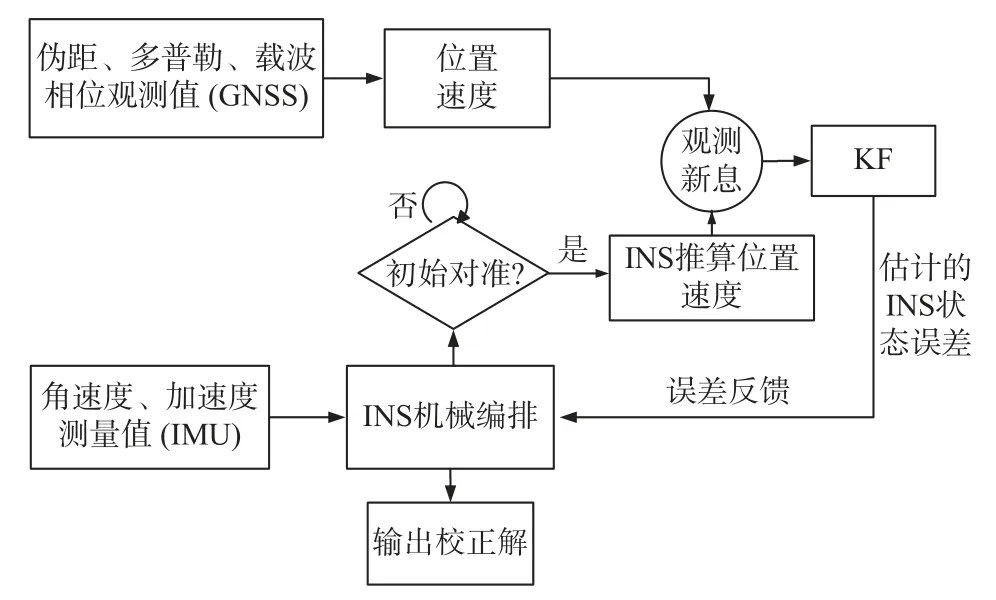
图1 GNSS/INS 松组合流程图
1)状态模型
关于公式的详细介绍可参考文献[10].
2)观测模型
在GNSS/INS 组合中,IMU 和GNSS 之间存在杆臂,因此在量测更新时,需进行杆臂补偿.对于GNSS 和INS 的时间不同步性,实际应用中一般通过GNSS 接收机秒脉冲来实现硬件时间同步.故本文不考虑时间同步,考虑杆臂问题,可将GNSS 和INS的位置速度转换关系表示为:
式中:pGNSS、为SPP 的位置、速度;pINS、为INS 位置、速度;Lb为杆臂.考虑到实际导航中各种误差,对位置速度进行误差扰动,整理可得:
式中,ep、ev为GNSS 测量位置和速度误差.因此,可将观测模型表示为
其中
2 LSTM 辅助GNSS/INS 组合导航算法
2.1 LSTM 网络
LSTM 是RNN 网络的改进模型,引入了存储器单元,借助门控单元解决了梯度爆炸和消失,结构如图2 所示.
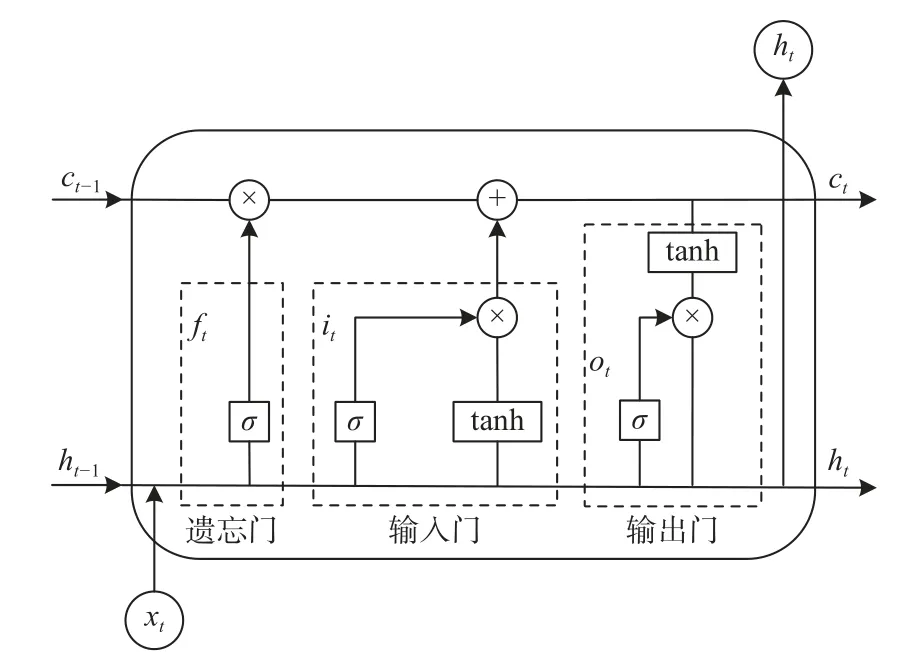
图2 LSTM 结构
每个单元结构由遗忘门f、输入门i和输出门o组成.c表示记忆单元,σ表示sigmoid函数,h表示隐藏状态.xt表示输入序列.LSTM 网络的计算过程为
式中:xt为t时刻的输入序列;ωf、ωi、ωo、ωc项为训练的权重参数矩阵;bf、bi、bo、bc项为偏置向量;符号◦为按元素乘,tanh为输出层激活函数.ft决定ct-1哪些信息传递给当前时刻ct,it决定xt哪些信息传递给当前时刻ct,ct经过tanh激活函数后与输出门ot按位乘,得到网络最终的输出ht.
2.2 LSTM 辅助GNSS/INS 组合导航系统模型
输入特征和输出特征是构建LSTM 网络辅助GNSS/INS 组合导航的前提,INS 的测量信息由IMU提供,为三轴角速度和比力,INS 的导航误差包括位置误差、速度误差和失准角(姿态)误差,理论上应将输出特征选择为位置误差、速度误差和失准角误差共9 个维度,但维度的过多增加会导致训练效果变差,考虑到实际情况为车载环境,用户主要关注水平方向的位置和速度.为此输入特征选择为三轴角速度和比力信息,输出特征选择失准角误差、东(east,E)方向和天顶(up,U)方向速度误差、纬度和经度位置误差,降低了输出特征纬度来提升训练效果.
训练阶段如图3 所示,将IMU 测量得到的角速度和比力信息作为网络训练的输入,将滤波器输出的失准角误差、经纬度位置误差和东北(eastnorth,EN)方向速度误差作为输出来进行训练.
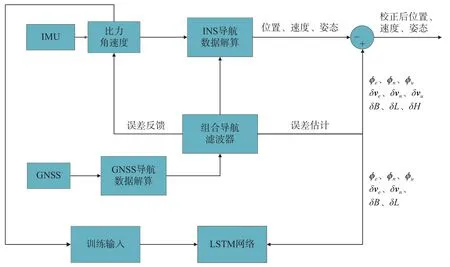
图3 LSTM辅助CNSS/INS组合航训练阶段原理图
LSTM 辅助GNSS/INS 组合导航系统的预测阶段原理如图4 所示,具体步骤可分为以下7 步:
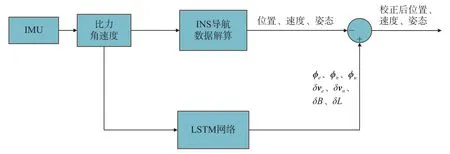
图4 LSTM 辅助GNSS/INS 组合导航预测阶段原理图
1)确定模型输入输出
将IMU 在t时刻输出的三轴测量角速度和三轴比力(加速度)信息作为输入特征,记为Xt作为网络输入,需要同时将该时刻滤波器输出的E、N、U 方向上的失准角误差、纬度、经度位置误差和EN 方向速度误差作为期望输出,记为Yt=(ϕe,ϕn,ϕu,δve,δvn,δB,δL),需要注意的是IMU 的测量数据Xt的频率为1s 200 次,而滤波器输出的导航误差Yt为1s1 次,两者频率不同,为实现映射关系,将1s 时间内的IMU 的所有测量信息作为输入特征,对应导航误差Yt.
2)执行标准化
3)设置LSTM 网络参数
LSTM 训练的准确性与网络参数密切相关,常见的如隐藏层层数、隐藏层神经元个数、学习率等.训练速度和训练误差和隐藏层数多少有关,在本次训练中设置一层隐藏层,对于隐藏层神经元的个数,本文首先采用的经验公式设置神经元个数,其中m表示输入层特征数,n表示输出层特征数,在此基础上根据训练效果进行神经元个数的调整.Adam 算法采用矩估计,具有自适应性、计算速度快、占用内存小等优点.故选择Adam 来加快训练速度.
4)训练网络
5)LSTM 预测
GNSS 信号失锁时,将INS 角速度和比力信息输入训练好的网络,可输出标准化的预测序列.
6)去标准化
将上一步得到的序列恢复原量纲,反标准化得到预测Yt,即E、N、U 方向上的失准角误差、纬度、经度位置误差和E、N 方向速度误差.
7)误差反馈
将预测的Yt反馈给当前INS 机械编排的姿态、速度和位置,对INS 导航信息进行补偿,得到最终预测导航结果.
3 测试结果与分析
3.1 实验环境及数据处理策略
直接采集遮挡环境下数据验证算法会出现参考解精度下降甚至不准确,为此先采集空旷环境下数据,再进行遮挡环境模拟来验证LSTM 辅助GNSS/INS 组合导航算法性能.实验数据采集日期为2023年2 月9 日,采集地点为中国科学院国家授时中心航天基地园区高精度定位测试轨道,轨道如图5 所示.采集时长约53min,移动集成测试平台如图6 所示.实验设备表如表1 所示,使用一台Trimble NetR9 GNSS 接收机和北京知行博远科技有限公司POLA_V18D 产品中的NAV300G 惯导,使用一台和芯星通UR4B0-D GNSS 接收机做基准站并架设于国家授时中心航天基地园区导航楼楼顶,利用IE8.7 软件多系统RTK/INS 双向平滑紧组合处理结果作为参考真值.

表1 实验设备表
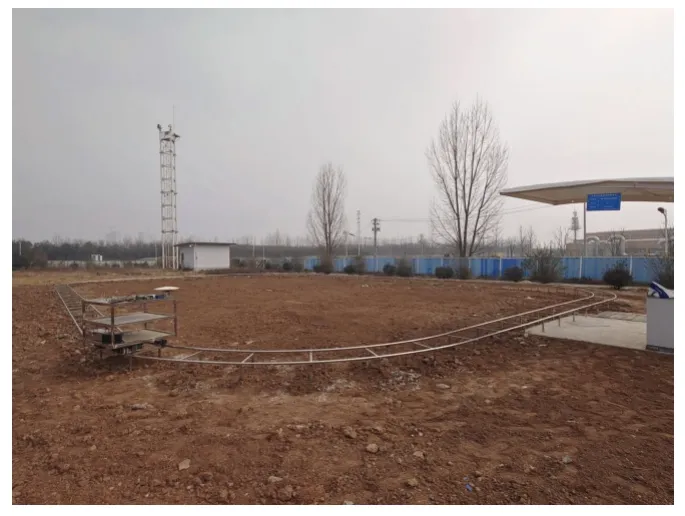
图5 国家授时中心高精度定位动态测试轨道
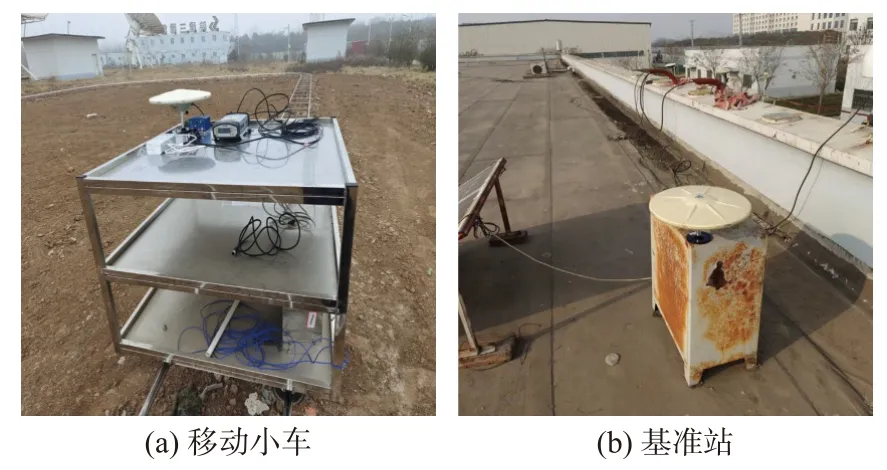
图6 移动集成测试平台
将NAV300G 静置约7.5h,采集陀螺仪和加速度计原始数据(以速率形式给出),采样率为200Hz,对陀螺仪和加速度计进行Allan 方差分析[12],绘制双对数曲线便于随机误差参数的识别,提取状态模型中陀螺和加速度零偏建模的关键参数.
图7~8 分别给出了陀螺仪和加速度计的Allan分析图,可以看出,NAV300G 的陀螺仪、加速度计的三个轴也基本一致.在实际组合导航中主要关注角度随机游走、速度随机游走、陀螺和加速度计的零偏稳定性和角速率和加速率随机游走,通过最小二乘拟合,得到随机误差参数,如表2~3 所示,这些参数将用于组合导航系统模型建模.
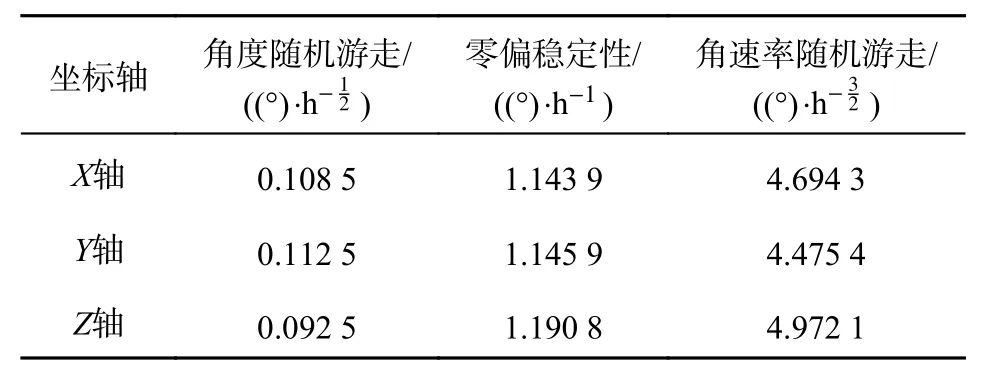
表2 陀螺仪Allan 方差分析结果
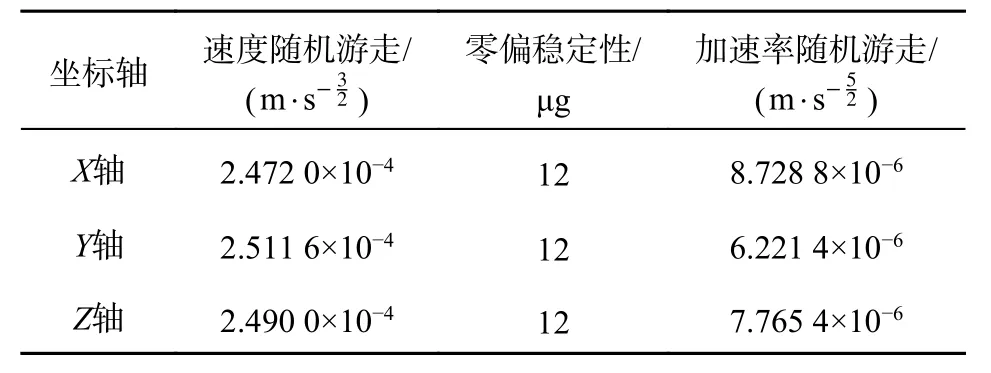
表3 加速度计Allan 方差分析结果
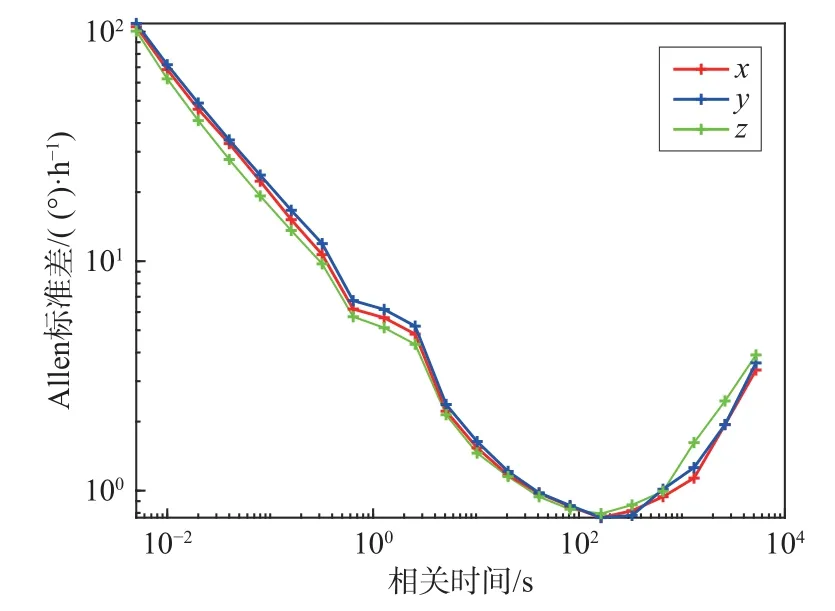
图7 陀螺仪Allan 方差图
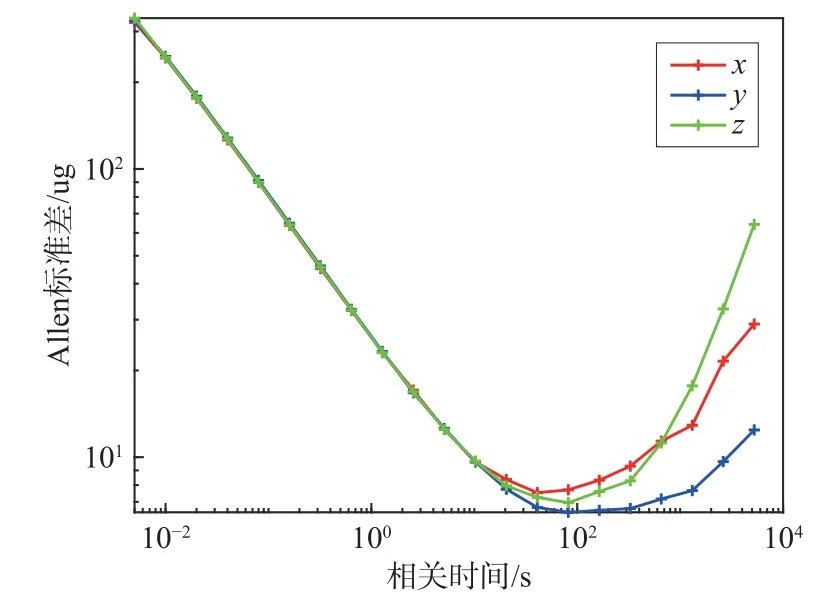
图8 加速度计Allan 方差图
GNSS/INS 数据处理模型与参数设置如表4 所示.
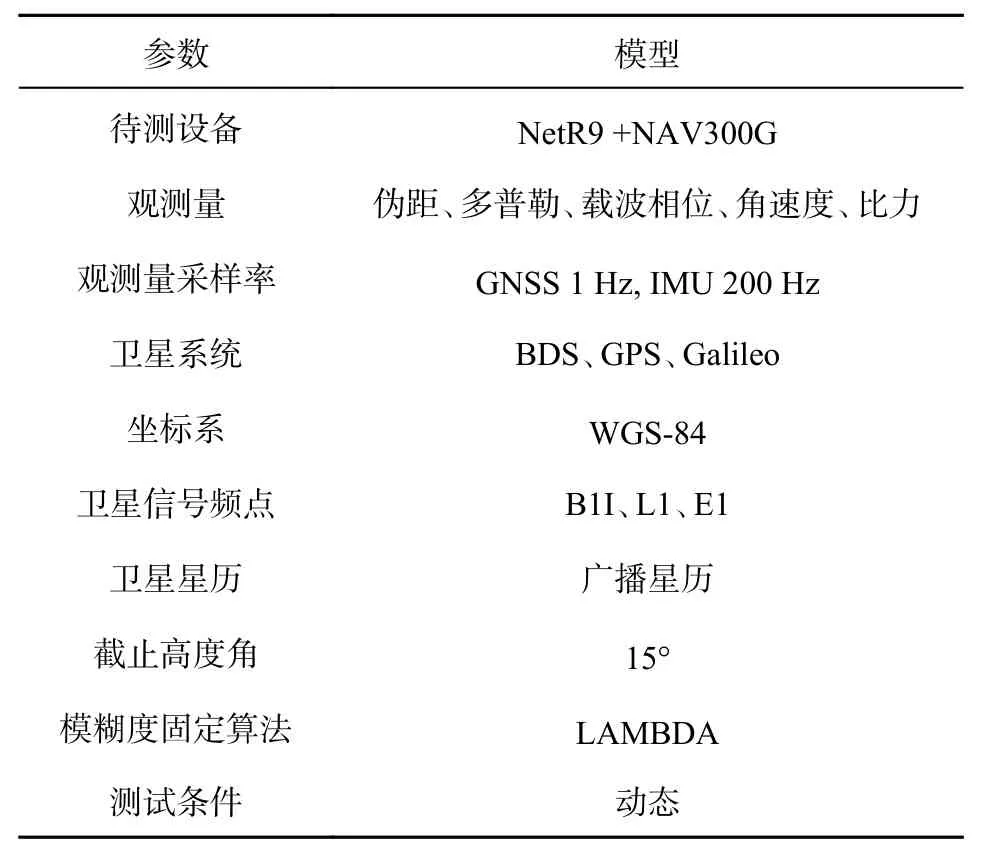
表4 GNSS/INS 组合数据处理模型与参数设置
小车运行轨迹如图9 示.图10 展示了本次实验中的卫星可见数和几何精度因子(geometric dilution precision,GDOP),卫星可见数保持在23 颗以上,最多时达到了28 颗,卫星可见数并不稳定,可能与接收机的性能、实验场景中轨道旁房子、大天线造成的干扰有关,当可见卫星数增多时,GDOP 会减小,相应的可见卫星数减少时,GDOP 会变大.

图9 小车行驶轨迹
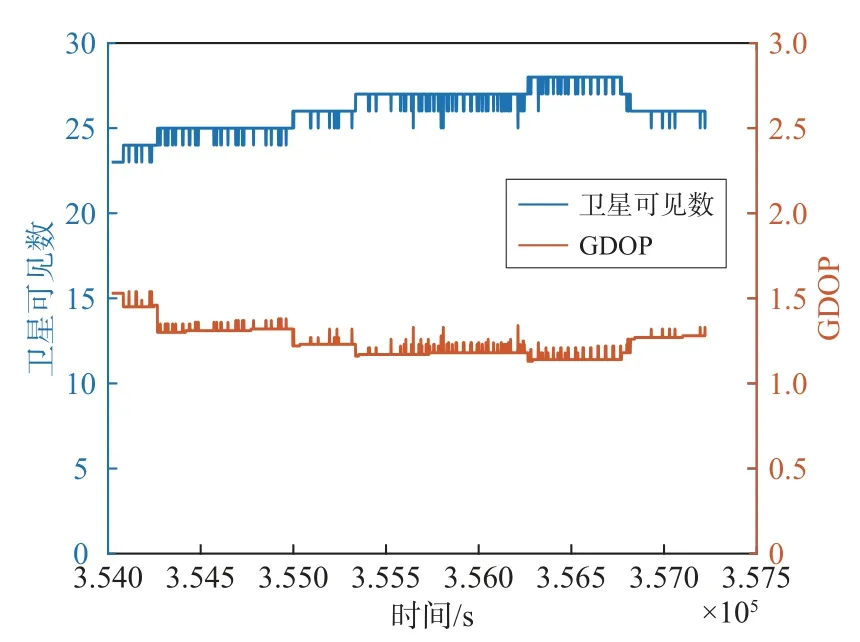
图10 卫星数与GDOP
假设GNSS 信号在356500~356529s 期间失锁30s,在357000~357099s 期间失锁100s,下面就此两个时间段进行LSTM 辅助GNSS/INS 组合导航算法性能评估.LSTM 模块的一些训练参数如表5 所示,MaxEpochs 表示最大迭代次数,越大训练时间越长,可根据训练效果进行参数调整.numHiddenUnits表示隐藏单元,设置依据可参考上文预测详细步骤.MiniBatchSize 表示最小批次,由于数据量不是很大,批次越小越稳定,为此选择1.InitialLearnRate 表示初始学习率,一般设置为0.001.LearnRateDropPeriod 控制乘法之间的迭代次数,LearnRateDropFactor 控制乘法因子.
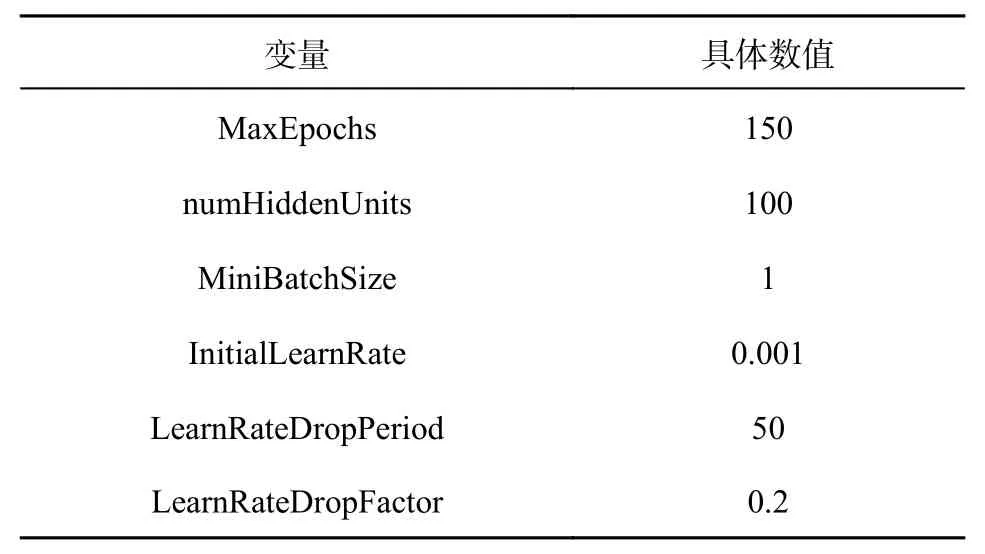
表5 训练参数设置
3.2 GNSS 信号失锁30 s 性能分析
图11 展示了GNSS 信号失锁30s 时有无LSTM辅助组合导航位置误差对比图,天向方向上两种方案差异不大,误差均在0.03m 内,但在水平方向上两中方案差异明显.随着时间增加,INS 的水平方向位置误差快速增加,使用LSTM 辅助手段之后,位置误差增大的趋势明显下降,这在E 向上更加明显.

图11 GNSS 信号失锁30 s 有无LSTM 辅助组合导航位置误差对比
表6 给出了GNSS 信号失锁30s 各时间段有无LSTM 辅助组合导航位置误差对比,可以看到在U 方向上LSTM+INS 相比INS 在30s 内的辅助效果并不明显,这是因为小车实际运行环境中没有高度的变化所致.而在水平方向上LSTM+INS 相比INS 导航定位误差明显减小.中断5s 时,INS 的水平位置误差已超过厘米级,而LSTM+INS 的水平位置误差仍在1cm 内,当中断15s 时,LSTM+INS 的水平位置误差才超过厘米级.就保持高精度定位即厘米级误差的时间来说,LSTM+INS 相比INS 提升了约200%.
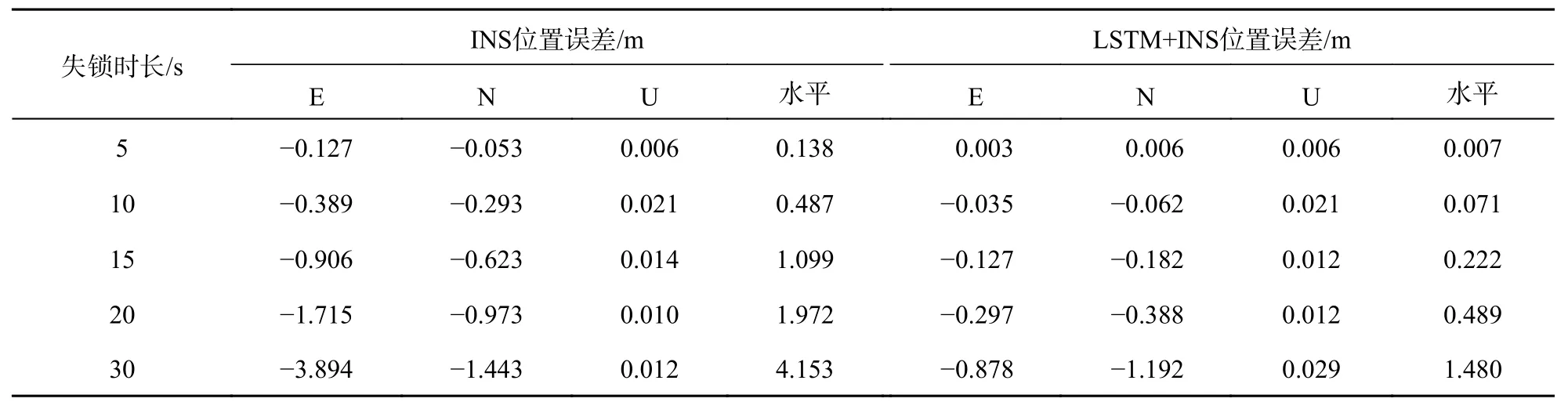
表6 GNSS 信号失锁30 s 各时间段有无LSTM 辅助组合导航位置误差对比
图12 展示了GNSS 信号失锁30s 时有无LSTM辅助组合导航速度误差对比,可以看到随着时间增加,INS 的E 向速度误差增大明显,而使用LSTM 辅助手段之后,E 向速度误差增加非常缓慢.N 向速度方向上,在GNSS 信号失锁前20s 内LSTM 辅助效果明显,之后效果不明显.两种方案的北向速度误差基本在0.1m/s 范围内.两种方案的U 方向速度误差均在0.01m/s 范围内,此次模拟LSTM 辅助组合导航速度提升效果从高到低依次是E、N、U.
图13 展示了GNSS 信号失锁30s 时有无LSTM辅助组合导航姿态角误差对比,可以看到两种方案俯仰角误差保持在0.15°以内,横滚角误差基本保持在0.1°以内,INS 的航向角随着时间增加呈现变小的趋势,而LSTM+INS 因为对航向角进行了补偿,所以围绕着INS 的航向角误差呈现上下波动情况,总体来看,LSTM+INS 相比INS 对姿态角精度提升并不明显.
表7 给出了GNSS 信号失锁30s 时有无LSTM辅助组合导航误差统计结果,从统计结果来看,两种方案的姿态误差差异不大,在U 向的位置和速度误差差异不大,但水平的位置和速度误差差异明显.水平位置误差方面,相比INS,LSTM+INS 在E、N 方向的位置误差最大值分别降低了77.45%、17.39%,均方根误差(root mean square error,RMSE)分别降低了79.53%、42.36%.水平速度误差方面,相比INS,LSTM+INS 在E 向的速度误差最大值降低68.28%,RMSE在E、N 方向上分别降低了74.84%、3.64%.总体来看,LSTM 辅助组合导航可以大幅度提升定位测速性能.
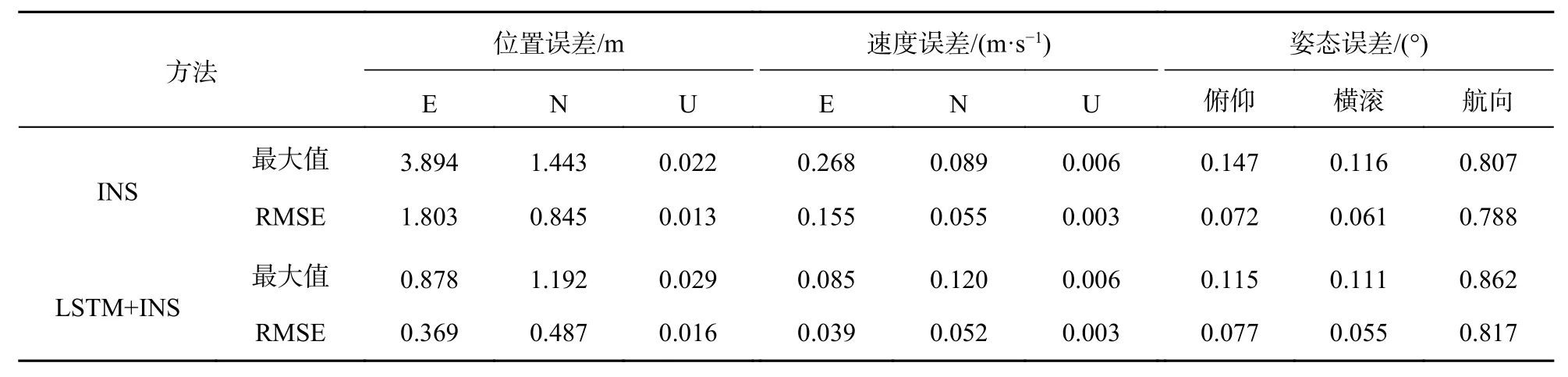
表7 GNSS 信号失锁30 s 有无LSTM 辅助组合导航误差统计结果
图14 展示了GNSS 信号失锁30s 时有无LSTM辅助导航轨迹与真实轨迹对比情况,其中真实轨迹用绿色线条表示,INS 轨迹用红线表示,LSTM 辅助组合导航系统用蓝色线条表示,三种方案的起始位置在图中坐标为(0,0),可以看到在刚开始的阶段,INS 和LSTM+INS 的导航轨迹与真实轨迹一致,在第一段直线行驶路中,INS 轨迹已慢慢偏离真实轨迹,第二次转弯之后,INS 轨迹明显偏离真实轨迹,而LSTM+INS 由于补偿了INS 的导航误差仍可以与真实轨迹保持一致,之后INS 位置误差发散越来越明显,在小车第三次转弯后,LSTM+INS 轨迹开始偏离真实轨迹.相比INS 轨迹,LSTM+INS 的轨迹与真实轨迹接近.
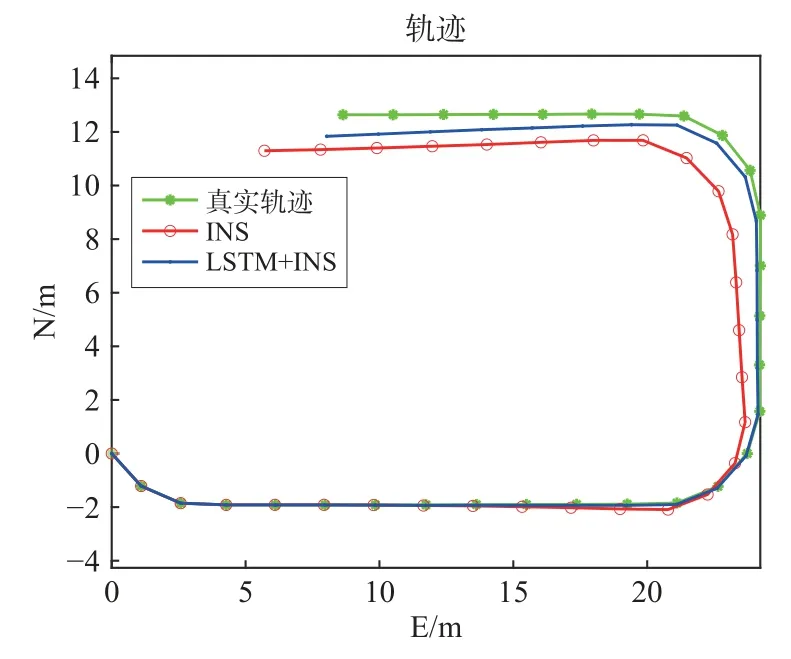
图14GNSS 信号失锁30 s 导航轨迹对比
3.3 GNSS 信号失锁100 s 性能分析
图15 展示了GNSS 信号失锁100s 时有无LSTM辅助组合导航位置误差对比图,可以看到随着时间增加,INS 的位置误差越来越大,使用LSTM 辅助手段之后,位置误差增大的趋势明显下降.
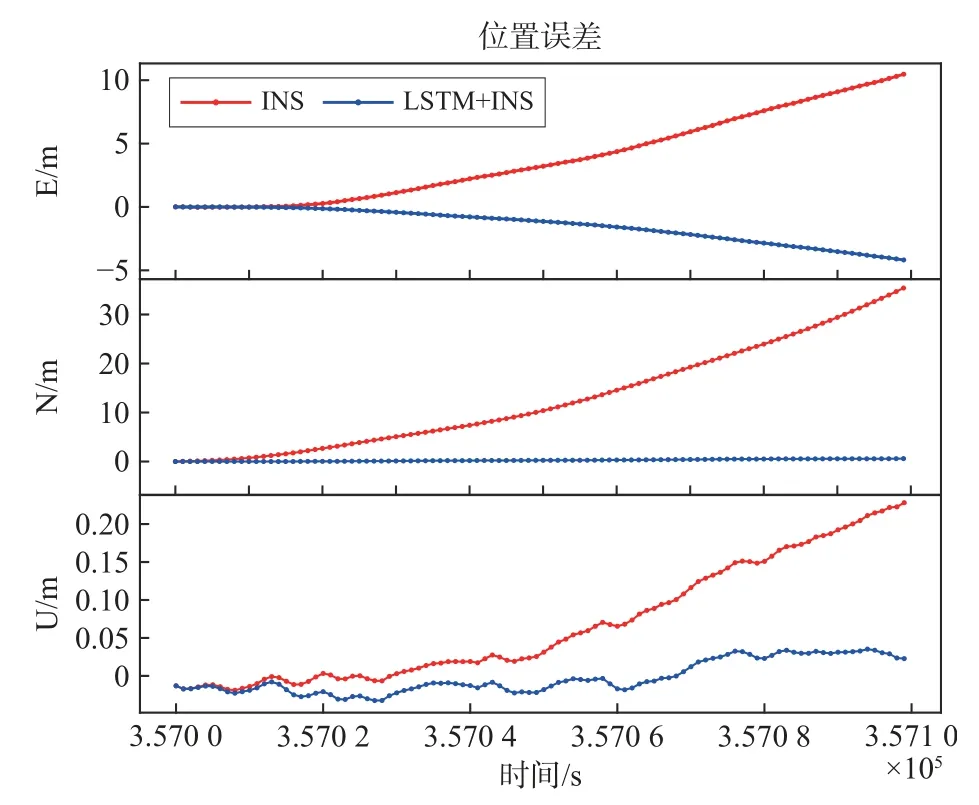
图15 GNSS 信号失锁100 s 有无LSTM 辅助组合导航位置误差对比
表8 给出了GNSS 信号失锁100s 各时间段有无LSTM 辅助组合导航位置误差对比,可以看到在U 方向上,GNSS 失锁前30s 内,LSTM+INS 相比INS的位置误差基本相同,但在30s 之后,LSTM+INS 很好的抑制了INS 误差的增加.U 方向上各时间段内LSTM+INS 相比INS 定位误差明显减小,中断5s时,INS 的水平位置误差已超过厘米级,而LSTM+INS 的水平位置误差仍在1cm 内,当中断20s 时,LSTM+INS 的水平位置误差才超过厘米级.就保持厘米定位误差的时间来说,LSTM+INS 相比INS 提升了大约300%,对比表6 展示的GNSS 信号失锁30s各时间段有无LSTM 辅助组合导航位置误差,可以看到LSTM 辅助保持厘米级的时间增加了25%,这是因为此次相比上一次GNSS 信号失锁30s 时的训练数据更加充分,因此预测效果更好.
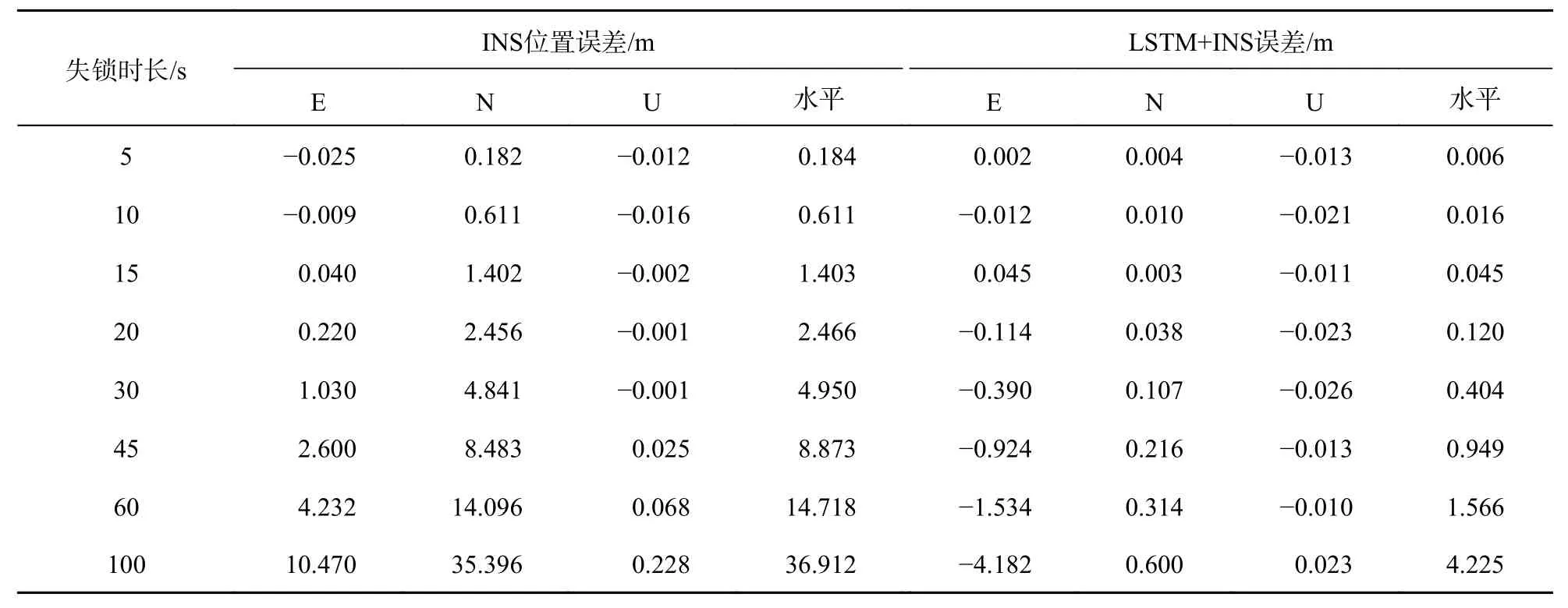
表8 GNSS 信号失锁100 s 各时间段有无LSTM 辅助组合导航位置误差对比
图16 展示了GNSS 信号失锁100s 时有无LSTM辅助组合导航速度误差对比,可以看到随着时间增加,INS 的E、U 方向速度误差增大明显,而LSTM+INS 的E、U 方向速度误差增大的趋势明显下降,其中N 方向速度误差在0.05m/s 范围内.在U 方向上两种方案的速度误差基本上在0.01m/s 范围内,INS的速度误差有缓慢增大趋势,而LSTM+INS 增长趋势进一步变慢.
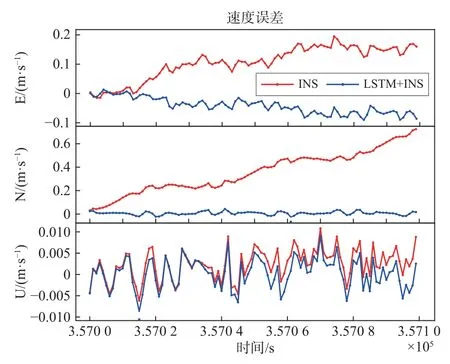
图16 GNSS 信号失锁100 s 有无LSTM 辅助组合导航速度误差对比
图17 展示了GNSS 信号失锁100s 时有无LSTM辅助组合导航姿态角误差对比,可以看到两种方案俯仰角误差保持在0.08°以内,横滚角误差保持在0.05°以内,INS 的航向角随着时间增加呈现变大的趋势,因为LSTM+INS 对航向角进行了补偿,所以围绕着INS 的航向角误差呈现上下波动情况,总体来看,LSTM 辅助相比INS 在姿态角精度的提升并不明显.
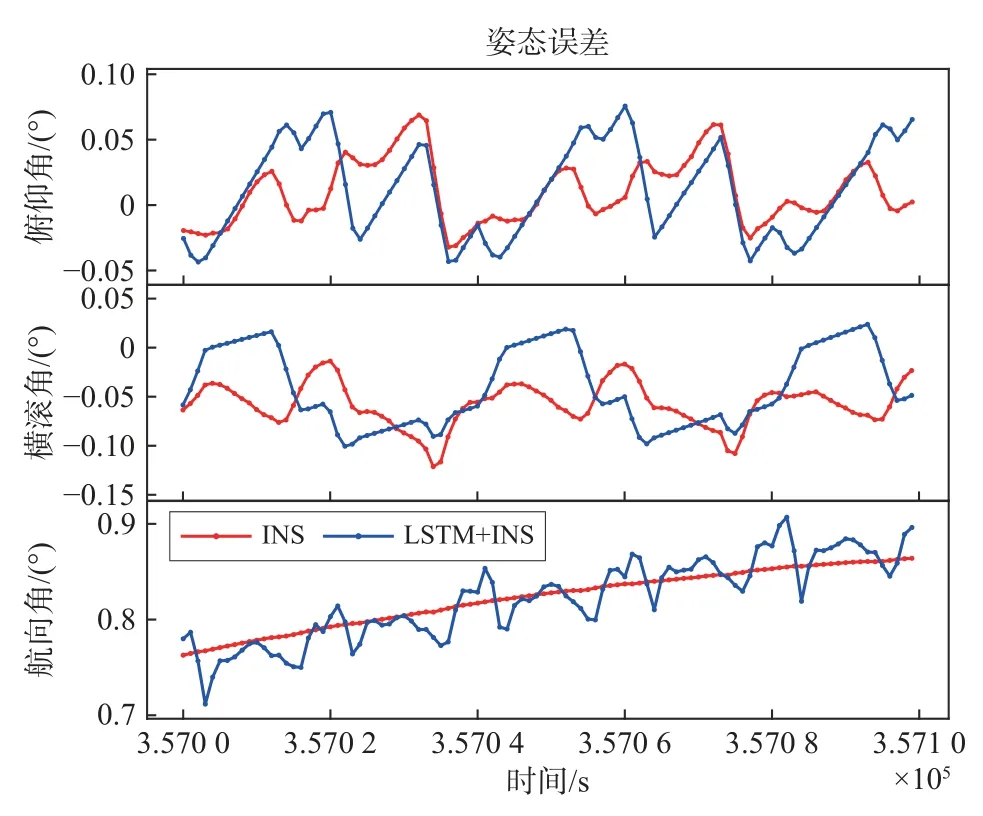
图17 GNSS 信号失锁100 s 有无LSTM 辅助组合导航姿态误差对比
表9 给出了GNSS 信号失锁100s 时有无LSTM辅助组合导航误差统计结果,由表可知,两种方案的姿态误差差异不大,在N 向的位置和速度误差差异较明显,水平的位置和速度误差差异显著.位置误差方面,相比INS,LSTM+INS 在E、N、U 三个方向上的位置误差最大值分别降低了60.07%、98.30%、84.65%,RMSE 分别降低了61.96%、97.98%、84.65%.速度误差方面,相比INS,LSTM+INS 在E、N、U 方向的速度误差最大值分别降低了53.85%、93.92%、18.18%,RMSE 分别降低了57.98%、96.23%、25%.总体来看,LSTM 辅助组合导航可以大幅度提升定位测速性能.
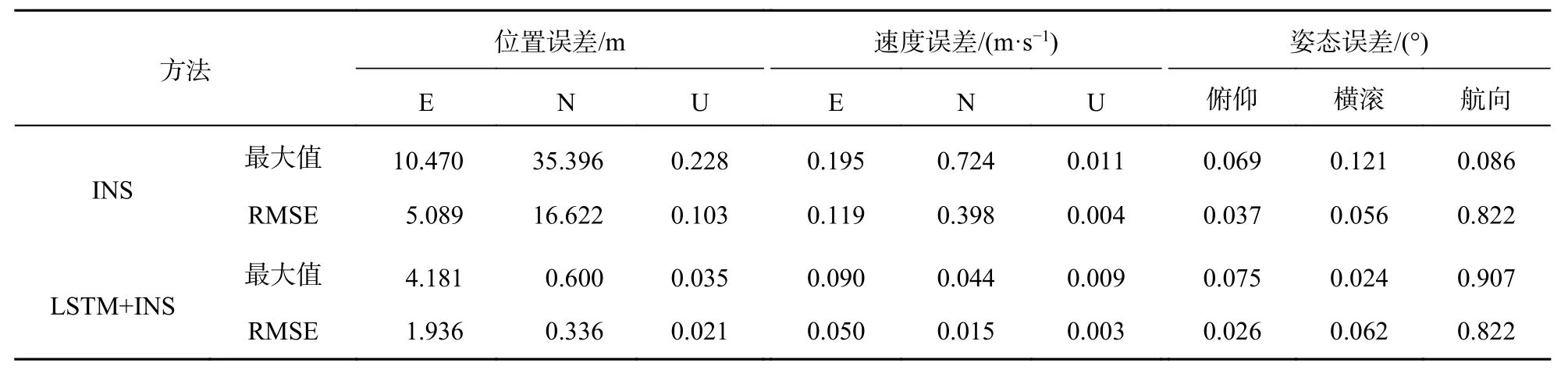
表9 GNSS 信号失锁100 s 时有无LSTM 辅助组合导航误差统计结果
图18 展示了GNSS 信号失锁100s 时有无LSTM辅助导航轨迹与真实轨迹对比情况,其中真实轨迹用绿色线条表示,INS 轨迹用红线表示,LSTM 辅助组合导航系统用蓝色线条表示,三种方案的起始位置在图中坐标为(0,0),可以看到在第一次转弯之后,INS 轨迹渐渐偏离真实轨迹,而LSTM 辅助由于补偿了INS 的导航误差仍可以与真实轨迹保持一致,当小车第三次转弯时,INS 的位置误差发散已经很严重了,和真实轨迹相差甚远,而LSTM 辅助的轨迹与真实轨迹的差异相比INS 明显小了很多,随着时间增加,LSTM+INS 的轨迹也开始偏移,但相比INS,与真实轨迹趋势接近.
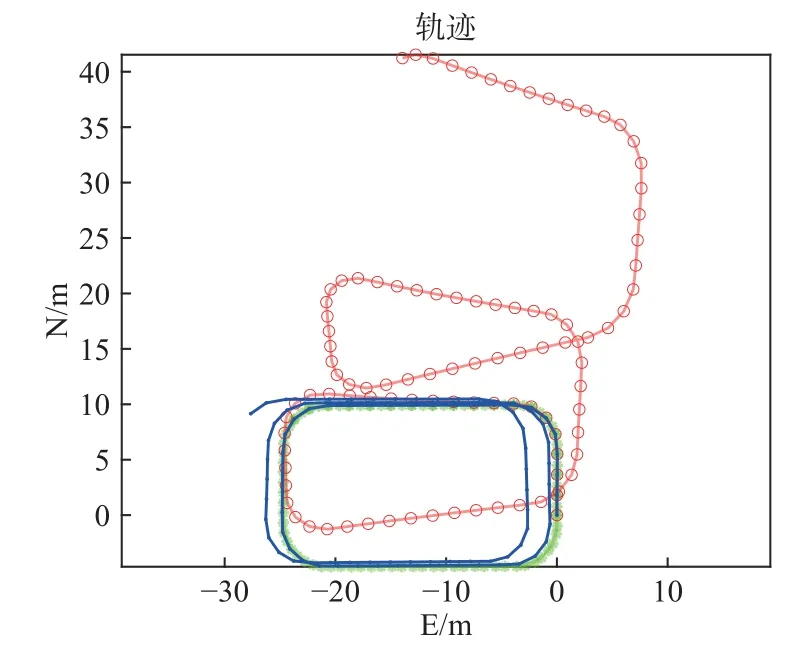
图18 GNSS 信号失锁100 s 导航轨迹对比
4 结束语
时,LSTM 辅助组合导航系统在E、N 方向的位置误差最大值分别降低了77.45%、17.39%,RMSE 分别降低了79.53%、42.36%;当GNSS 信号失锁100s 时,LSTM辅助组合导航在E、N、U 三个方向上的位置误差最大值分别降低了60.07%、98.30%、84.65%,RMSE 分别降低了61.96%、97.98%、84.65%.由此可见LSTM辅助较大地提升了车载GNSS/INS 组合导航系统的导航性能.
本文的测试场景还不够丰富,未来还需要采集大量的行车数据对LSTM 辅助车载GNSS/INS 组合导航算法性能进行评估.