多物理场迁移相关分析的旋转机械智能诊断方法
2023-12-01孙原理宋志浩
孙原理, 宋志浩
(1.清华大学 核能与新能源技术研究院,北京 100084;2. 海军研究院,北京 100161)
旋转机械在国防和工业领域中被广泛应用,其运行的安全可靠性往往关系到系统的稳定运行。长期工作于高温、高压、高转速等恶劣的工作环境,旋转机械极易引发腐蚀、磨损等性能,若无法及时发现并排除这些故障,会给整个系统带来的极大的安全隐患,因此研究高精度旋转机械智能故障诊断方法具有重要意义。
近年来,随着旋转机械设备的高度现代化和智能化,存在着海量的数据来表征机械的运行状态,而k近邻[1]、人工浅层神经网络[2]等传统故障诊断模型难以表征数据与故障类别之间的复杂映射关系。深度学习由于其特征提取和特征表达能力较强,可实现高维数据与故障类别之间复杂映射关系,并被广泛应用于旋转机械故障诊断领域中。常用的深度学习方法有卷积神经网络(convolutional neural network, CNN)、深度置信网络(deep belief networks,DBN)、长短时记忆(long short-term memory, LSTM)网络等,并在故障诊断领域均有所研究与应用。Jiang等[3]提出一种多层深度学习卷积神经网络用于滚动轴承故障诊断,采用归一化预处理的方法对振动信号进行预处理,将处理后的信号送入多层CNN进行模式识别。王琦等[4]针对现有模型参数多、诊断率等问题,提出了一种改进的一维卷积神经网络的滚动轴承智能故障诊断模型(faultrecognition based on improved one-dimensional convolutional neural network, FRICNN-1D),该方法引用1×1卷积核增强了模型的非线性特征提取能力,并利用全局平均池化替代了传统全连接层,提高了计算效率。试验验证结果表明该方法在滚动轴承故障诊断中取得到了较好的诊断效果。Chen等[5]提出了一种基于稀疏自动编码(sparse automatic encoding, SAE)和DBN的故障诊断模型,采用多传感器融合技术融合来自不同传感器的振动信号,对融合信号特征提取后将统计特征送入二层稀疏自动编码神经网络进行处理,最后用DBN进行进一步分类。Xia等[6]提出了一种多传感器信号融合与卷积神经网络结合的旋转机械故障诊断方法,相比于单一信号提高了诊断准确率。Xing等[7]构建了并行注意力机制卷积神经网络处理多传感器信号,提高了故障诊断准确率。Shao等[8]利用粒子群优化的DBN进行滚动轴承故障诊断,其中将随机梯度下降用于受限波尔兹曼机(restricted Boltzmann machines, RBM)预训练之后的权重微调,粒子群算法进一步确定训练后的DBN的最优结构,最后使用优化的DBN进行故障诊断。Chen等[9]提出了一种多尺度CNN和LSTM相结合的滚动轴承故障诊断模型,通过建立两个CNN框架从不同尺度上提取原始振动信号特征,并结合LSTM网络提出数据的时序相关性,利用滚动轴承试验数据进行了验证,结果表明该模型可以实现较高的故障诊断准确度。
虽然基于深度学习的故障诊断方法取得一定的成果,但是大量旋转机械带标签的训练数据是基于深度学习等智能诊断模型有效性的重要保障,而实际中收集丰富的标签训练数据需要消耗大量的人力、财力等资源,并且受旋转机械运行条件限制,甚至无法得到特定工况运行数据。由于缺乏待诊断工况的标签数据参与故障诊断模型训练,导致模型在该工况下的诊断准确率下降,甚至完全失效。迁移学习方法[10]旨在利用一个数据域学习到的知识应用于另一数据域,有望解决上述问题。Han等[11]针对实际中迁移学习故障诊断中没有大量标注的训练样本问题,提出了一种仅利用少量标注样本解决迁移故障诊断问题的新框架,主要思想是将相同工况下的源域和目标域数据进行匹配并进行域自适应,以缓解目标域标注数据少的问题,同时缩小分布的差异以避免负迁移影响。陈祝云等[12]提出了一种增强迁移卷积神经网络模型解决旋转机械变工况下故障诊断问题,该模型构建两个独立的分类器分别训练,引用对抗训练策略最大两个分类器分类差异的同时最小化源域与目标域特征分布差异,并通过试验所提出的模型优于其他迁移学习方法。雷亚国等[13]构建了领域共享的深度残差网络,并在训练过程中施加领域适配正则项约束,形成深度迁移模型能够运用试验室滚动轴承的故障诊断知识识别出机车轴承的健康状态。张西宁等[14]采用预训练微调的迁移学习方法解决目标域标注样本不足的迁移学习故障诊断问题,文章采用全局池化层代替卷积神经网络中的全连接层进行分类输出,在保证模型精度的同时有效减少的参数量,利用大量有标注源域数据训练故障诊断模型后,使用少量有标注的目标域数据对模型参数进行微调,这种方法在小样本迁移故障诊断问题中能够实现较高的诊断准确度。
迁移学习方法能够从一定程度上解决旋转机械跨工况故障诊断问题。但上述基于迁移学习故障诊断利用了目标域少量样本数据,实际中可能仅含有大量无标签的的目标工况运行数据,并且这些方法也无法将旋转机械多物理场数据有效融合。针对上述问题,提出基于多物理场信号迁移相关分析的旋转机械跨工况智能故障诊断方法,首先针对某一工况下采集的带标签的多物理场运行数据,构建卷积神经网络提取多物理场信号的深层特征,根据卷积相关分析的多物理场信号融合策略得到多物理场信号特征相关度矩阵序列,并采用最大均值差异计算样本多物理场信号特征相关度矩阵序列的损失值,优化并缩小不同数据域之间的差异,同时将多物理场信号特征相关度矩阵序列输入构建的长短期记忆神经网络提取信号的时序相关特征,最后使用全连接神经网络进行故障诊断。本章提出的方法利用旋转机械在某一工况下的带标签的多物理场运行数据以及目标工况的无标签数据训练基于物理场信号迁移相关分析的跨工况故障诊断模型,并将该模型应用于目标工况的故障诊断中,解决领域自适应故障诊断问题。
1 多物理场迁移相关分析故障诊断方法
1.1 问题定义

1.2 卷积特征相关分析
传统基于卷积神经网络的旋转机械多物理场信号进行提取方法存在如下问题:一方面传统方法对每个多物理场信号单独的进行特征提取,没有考虑多物理场信号之间的空间相关性,无法有效对多物理场信号进行有效的融合,提取的特征比较孤立;另一方面一维多物理场信号是时间序列数据,而在传统卷积神经网络在对物理场信号提取的过程中没有将信号在时间维度上关联,无法提取信号的时序关联特征。
针对上述问题,为了充分提取多物理场信号之间的相关性信息以提高旋转机械故障诊断准确度,提出了基于多物理场信号卷积特征相关分析的特征提取方法。该方法在卷积神经网络对多物理场信号提取特征的基础上,以卷积神经网络输出的多物理场信号特征为输入,得到多物理场卷积特征相关度矩阵,该矩阵包含了多物理场信号之间的相关性信息,可有效提取旋转机械故障判别的多物理场信息。
为了从不同的角度提取多样的特征表示,在使用卷积神经网络对一维信号进行特征提取中通常使用多个卷积核进行运算。卷积核滑动计算得到特征表示,这些特征表示可认为是按照时间顺序排列。所提出的多物理场信号卷积特征相关分析流程示意图如图1所示。具体操作步骤如下所述。

图1 多物理场信号卷积特征相关分析示意图Fig.1 Schematic diagram of multi-physics signal convolution feature correlation analysis
步骤1构建卷积神经网络对物理场信号进行卷积运算,得到不同卷积核的卷积特征表示。

(1)

步骤3将第t次计算得到的每个任意两个传感器信号的卷积特征相关系数组成J×J的卷积特征相关度矩阵Rt,该矩阵以某一传感器信号的卷积特征为基准,与其他传感器信号的卷积特征相关系数组成一行或一列的方式排列,形成的多物理场卷积特征相关度矩阵
(2)
式中,J为多物理场传感器信号的数量。
1.3 所提出方法架构
所提出的基于多物理场信号迁移相关分析的智能诊断方法的基本框架如图2所示,该模型主要由4个部分组成,分别是卷积神经网络、卷积特征相关度矩阵、LSTM网络以及判别器。LSTM网络[15]是在传统循环神经网络基础上改进而来的,在提供记忆功能的同时,避免了循环神经网络模型在训练过程中出现的梯度弥散问题,适用于处理多物理场一维时间序列信号。源域及目标域输入的多物理场信号均是一维时间序列信号,因此构建的卷积神经网络为一维标准结构,包含多组卷积层、池化层以及激活层;输入信号经过卷积神经网络特征提取后,利用所提出的卷积相关分析计算方法获得多物理场信号卷积特征相关度矩阵序列,提取多物理场信号之间空间相关信息;其次利用源域和目标域之间的最大均值差异损失,通过反向传播运算缩小源域与目标域之间的差异;将卷积特征相关度矩阵输入所构建的LSTM网络模型中,提取信号的时间相关信息;最后将LSTM输出送入判别器,判别器判断故障类别。
1.4 损失函数
将源域有标签的旋转机械多物理场数据输入基于多物理场信号迁移相关分析模型中,前向传播完成特征提取及故障类别判断。使用交叉熵损失函数作为源域的分类损失,表达式如式(3)所示。通过反向传播更新模型的参数,逐步减小分类损失函数值。
(3)
式中:q(xi)为第i个样本预测概率值;Yi为第i个样本真实值。
为了缩小源域和目标域数据之间的差异,将最大均值差异(maximum mean discrepancy,MMD)[16]作为域自适应损失函数,如式(4)所示。通过反向传播逐渐缩小域自适应损失值大小,进而降低源域数据和目标域数据之间的差异。
LD=LMMD(XS,XT)=

(4)
式中,k(·,·)为核函数。模型采用高斯核函数,表达式为
(5)
式中,σ为核宽度。
综上,提出的模型的总损失函数如式(6)所示
L=LC+λLD
(6)
式中,λ为域自适应损失权重超参数。
2 试验验证及分析
2.1 泵组试验台搭建及故障数据获取
为了验证所提出的基于多物理场信号迁移相关分析的旋转机械智能故障诊断方法的有效性,搭建泵组故障模拟试验台,包括驱动系统、管路系统、测试泵以及数据采集系统等,如图3所示。该试验台使用电机驱动泵组,电机与泵组之间采用联轴器连接,可通过变频器控制电机及泵的转速。该泵组试验台具有较好的兼容性,可开展不同泵组在正常、故障状态试验以及振动、压力、流量等多物理场信号采集。

图3 泵组故障模拟试验台Fig.3 Pump failure simulation test bench
利用搭建的泵组故障模拟试验台,开展了叶轮磨损、轴承内圈、轴承外圈等3种故障模拟试验,故障均为人工植入。如图4(a)所示为正常状态的叶轮,在其边缘加工缺损凹槽以模拟叶轮磨损故障,凹槽尺寸约为5 mm×20 mm,如图4(b)所示;在内圈或外圈加工一条贯穿的裂纹以模拟轴承内圈或外圈故障,裂纹宽度约为2 mm,如图4(c)和图4(d)所示。

图4 不同类型故障植入Fig.4 Different types of fault
在2 320 r/min,2 610 r/min,2 900 r/min 3种运行工况下,分别采集4种运行状态(3种故障状态和健康状态)的泵组联轴器位置振动信号、轴承处振动信号、泵体振动信号、出口流量信号、出口压力信号以及温度信号等6种多物理场信号,所使用的传感器型号及参数如表1所示,采样频率为10 kHz。

表1 多物理场传感器参数列表Tab.1 Parametersof multiphysicssensors
2.2 模型参数设计及故障诊断流程
2.2.1 模型参数设计
(1)卷积神经网络模型参数
在提出的基于多物理场信号迁移相关分析的旋转机械智能故障诊断方法中,卷积神经网络主要用于从多物理场原始数据中提取深层的特征表示,在每层卷积操作之后使用Relu激活函数以提高模型的非线性特征提取能力,构建的卷积神经网络参数如表2所示。卷积神经网络的输入大小为2 048。
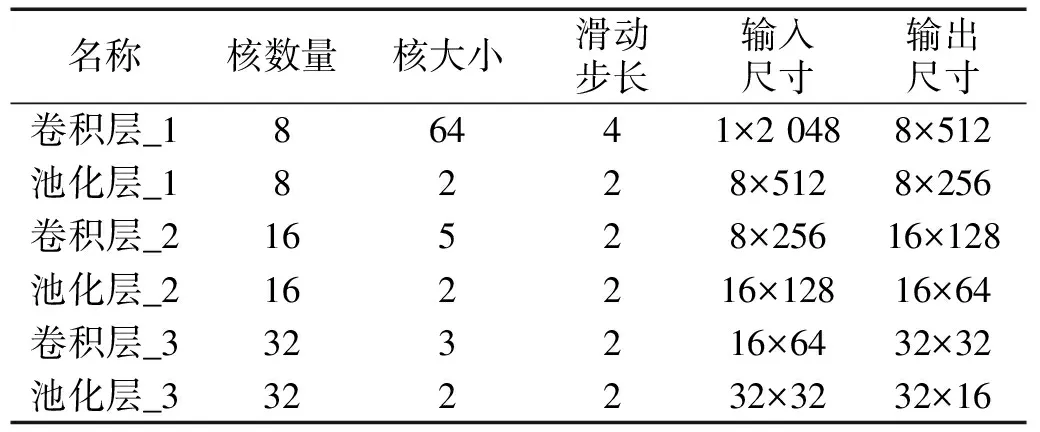
表2 卷积神经网络模型参数Tab.2 Convolutional Neural Network Model Parameters
针对每个多物理场信号单独构建一个上述结构的卷积神经网络,验证数据集共含有6个多物理场信号,因此构建6个卷积神经网络。各卷积神经网络的模型参数相互独立,以确保对每个多物理场信号进行独立的特征提取。
(2)LSTM模型参数
在每个卷积神经网络提取的多物理场特征的基础上,利用卷积特征相关分析方法得到多物理场卷积特征相关度矩阵,由于输入的是6个多物理场数据,因此得到的相关度矩阵大小为6×6。LSTM网络主要是从多物理场信号卷积特征相关度矩阵序列中提取信号的时序相关特征信息,使提取的故障特征更加充分,从而提高故障诊断准确率。设计的LSTM网络参数如表3所示。

表3 LSTM网络参数Tab.3 LSTM network parameters
(3)全连接网络模型参数
全连接网络主要是根据LSTM网络的输出结果,判断旋转机械的运行状态,实现故障判别诊断。本模型中全连接网络为二层:第一层的输入尺寸与LSTM网络的输出尺寸一致;第二层的输出尺寸为旋转机械设备的运行状态数量标识,模型验证数据集运行状态数量为4,模型参数如表4所示。

表4 全连接层网络参数Tab.4 Fully connected layer network parameters
(4)实施细节
模型使用Adam作为优化器,学习率设定为固定值为1×10-4,训练过程中将训练集数据划分为多个Batchsize,使用Batchsize大小为64,域自适应损失权重超参数λ取值为1。本文所提出方法模型以及对比方法模型均在PyTorch深度学习框架上实现。
2.2.2 故障诊断流程

图5 故障诊断流程Fig.5 Flowchart of the fault diagnosis method
具体诊断步骤为:
步骤1采集旋转机械在正常状态以及不同故障状态下的振动、温度、压力等多物理场信号。
步骤2根据跨工况诊断需求,划分训练集和测试集,训练集包括源域带标签数据和目标域无标签数据,测试集为目标域数据。
步骤3构建多物理场信号迁移相关分析诊断模型,输入训练集样本训练模型参数,直至Loss值满足要求。
步骤4将目标域测试样本输入训练完毕的诊断模型,提取旋转机械不同运行状态下的时、空相关性特征并完成诊断。
2.3 验证数据集建立及迁移诊断任务设定
对泵组试验台采集的不同运行状态的多物理场数据进行划分,每类运行状态含有200个训练样本和200个测试样本,每个样本包含2 048个数据点,数据集构建如表5所示。

表5 验证数据集Tab.5 Description of fault datasets
在本文讨论的旋转机械迁移故障诊断任务中,将离心泵在转速2 320 r/min或转速2 610 r/min设定为源域数据,将离心泵转速2 900 r/min设定目标域工况,设定的迁移诊断任务如表6所示。

表6 迁移诊断任务Tab.6 Transfer diagnostic tasks 单位:r/min
2.4 故障诊断结果及对比
使用训练集数据训练基于多物理场信号迁移相关分析的智能诊断模型,利用测试集的故障诊断准确率来衡量模型的诊断性能,诊断准确度定义如式(7)所示
(7)
式中:Ncorrect为测试集被诊断正确的样本数;Ntotal为测试集样本总数。
细纸筒一个,粗纸筒一个,纸圈两个,黑色套圈两个,黑色圆孔观察盖一个,彩色珠子若干,长方形镜片三个(也可以用能够反光的镜面纸,一般的快餐盒或礼品盒内都可以找到),彩色塑料片一片,透明塑料片一片,胶水、胶带、画笔,画纸若干。
2.4.1 不同模型结构方法对比
为验证所提出的基于多物理场迁移相关分析的智能故障诊断方法的优势,设计了3种对比方法进行测试。为了公平起见,3种方法的卷积神经网络模型结构一致,并且全连接层分类器均保持两层,不同之处在于对卷积特征处理,以及是否含有LSTM网络,并根据不同方法特征输出结果调整分类器的神经元数量。对比方法及详细描述如表7所示。

表7 不同模型结构对比方法设计Tab.7 Comparative method design
经过100次迭代后,得到不同方法在诊断任务一上的诊断率曲线和损失值曲线如图6所示。由图6可以看出,所提出的方法诊断准确率上升最快,并且在第40迭代步时,诊断准确率就达到了95%,说明所提出的方法收敛速度最快。相比其他3种对比方法,所提出的方法损失值最低,并且没有出现大幅度震荡的现象,说明该方法比其他3种方法训练更稳定。

图6 迭代过程中准确率和损失值曲线Fig.6 Accuracy and loss curves during iteration
为了消除随机因素的影响,进行20次测试并给出故障诊断准确率的平均值,得到了不同迁移诊断任务的试验结果如表8所示,可以发现,在设定的两个迁移诊断任务中,提出的方法均能达到最高的诊断准确度。
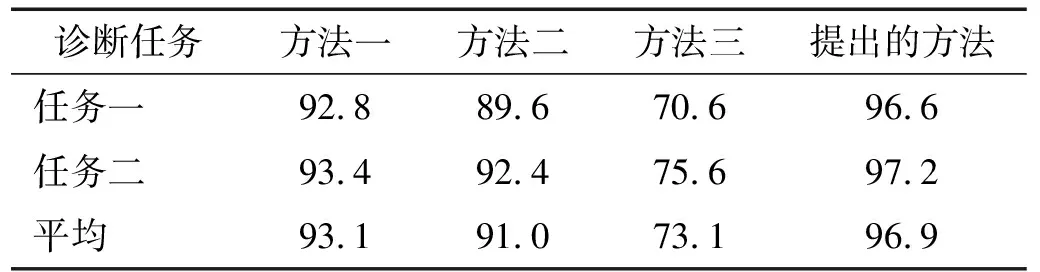
表8 不同任务下各种方法的故障诊断准确度对比
从表8诊断结果可以看出,与仅利用单一物理场数据的方法三相比,使用多物理场数据的方法一、方法二以及提出的方法故障诊断准确度均有大幅度提升,两个任务中的平均诊断率均超过了90%,其中方法一提高了20.0%,方法二提高了17.9%,提出的方法提高了23.8%。表明使用多物理场数据中含有丰富的故障判别性信息,利用这些数据进行故障诊断有利于故障诊断准确度的提高。
与使用多物理场数据的方法一和方法二相比,提出的方法故障的故障诊断准确率分别提高了3.8%和5.9%,这充分说明了多物理场卷积特征相关分析方法和LSTM方法在多物理场信号迁移故障诊断任务的优势,表明提出的方法能够从多物理场数据中提取域不变特征,进而提高了跨工况故障诊断准确度。
2.4.2 与其他信号融合跨工况诊断方法对比
采用两种基于信号融合的滚动轴承跨工况故障诊断方法与本文提出的多物理场迁移相关分析的诊断方法进行对比分析,分别构建Xia等和Xing等的故障诊断模型,测试模型在所设定的两个故障诊断任务中的诊断准确率。每种方法进行20次试验并取诊断结果的平均值,对比结果如表9所示。
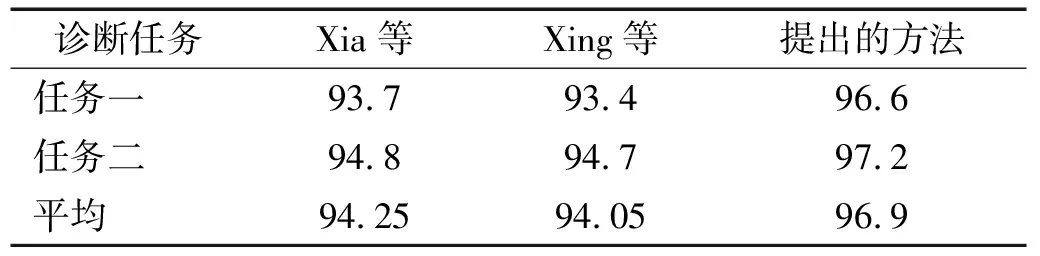
表9 不同信号融合跨工况诊断方法对比结果
由表9可以看出,本文提出方法在设定的两个迁移诊断任务诊断准确率分别为96.6%和97.2%,相比Xia等和Xing等的方法,平均诊断准确度分别提高了2.65%和2.85%,所提出的方法具有更高的诊断准确率。
2.5 诊断结果分析
为进一步分析所提出的多物理场迁移相关分析方法诊断结果的内部详细情况,使用混淆矩阵图来表征所提出的方法在设定的两个迁移诊断任务中,对不同故障类别的具体识别能力,如图7所示。

图7 所提方法诊断结果混淆矩阵Fig.7 The confusion matrix of results
从图7混淆矩阵中可以看出,所提出的方法对于工况一的正常状态和叶轮磨损状态以及工况二的正常状态识别准确率均为100%,对于工况二的叶轮磨损状态的准确率为99%,对于轴承内圈和轴承外圈故障识别均超过了90%以上。
为直观说明本文提出方法提取的不同运行状态故障判别性特征的有效性,使用t-SNE算法将LSTM输出的60维特征映射到2维平面表示,特征可视化结果如图8所示。

图8 t-SNE的特征可视化Fig.8 Featurevisualizationbased on t-SNE
从图8特征二维可视化可以看出,所提出的方法在两个迁移诊断任务中,对于正常状态和叶轮磨损状态有良好的区分;对于轴承内圈故障和外圈故障,个别样本的分类边界稍有重叠,但整体上来看内圈故障和外圈故障可以清晰的划清分类边界。
3 结 论
针对传统单一物理场信号无法充分提取域不变特征、跨工况诊断准确度提升困难问题,提出了基于多物理场信号迁移相关分析的智能故障诊断方法,通过试验验证,结果表明:相比利用单一物理场信号的跨工况故障诊断方法,提出的多物理场信号迁移相关分析方法能够大幅度提高故障诊断准确率,平均诊断准确度提高了23.8%;相比其他利用多物理场数据诊断的对比方法,提出的方法可以达到更高的故障诊断准确度,表明该方法能够提取域不变特征并进行跨工况迁移故障诊断。
