频域插值与窗宽优化提升外调制OFDR 空间分辨率研究∗
2023-11-29张建国梁昌硕靳宝全
申 振,张建国∗,白 清,2,梁昌硕,张 昆,王 宇,2,靳宝全
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西 太原 030024;2.山西省交通科技研发有限公司,山西 太原 030600)
分布式光纤传感技术因其适应性强、抗电磁干扰、本征安全、分布式测量等优势,成为了研究人员关注的热点[1-3]。其中,光频域反射(Optical Frequency Domain Reflectometry,OFDR)技术具有高精度、高空间分辨率和高灵敏度的特点[4-5],在温度监测、建筑结构健康监测和形状传感等领域得到广泛应用[6-7]。
基于外调制扫频光源的OFDR 系统,其光源具有线宽窄、扫频线性度高等优点,降低了OFDR 系统长距离传感时的噪声干扰,可有效提升传感距离[8]。然而,外调制OFDR 系统采用外置扫频微波源作为驱动信号,存在频率扫描范围较小的问题,严重制约了OFDR 系统的传感空间分辨率。针对这一问题,研究人员提出了循环移频器、注入锁定、四波混频等方案以提升光源的扫频范围进而提升系统空间分辨率[9-11]。然而上述方案均基于硬件改进实现,增加了系统结构复杂度和设备成本,同时也使得系统的整体控制策略更加复杂。除基于硬件改进方案外,减小数据处理过程中滑动窗函数窗宽的软件处理方法也被用做提升系统空间分辨率[12]。然而,研究表明减小窗宽可提升系统空间分辨率,但过小的窗宽会使定位结果出现异常“假峰” (ghost peak),导致系统定位准确度降低,即系统传感空间分辨率和定位准确度之间存在相互制约。
针对上述情况,本文提出频域插值和窗宽优化方法,综合评估系统的定位误差,在兼顾定位准确度的同时,优化系统窗宽,实现外调制OFDR 系统空间分辨率的进一步提升。首先阐述了OFDR 定位传感原理和解调方法,研究了影响系统空间分辨率的关键参数的选择问题,并搭建了外调制OFDR 温度定位传感系统,验证了频域插值和窗宽优化方法对系统空间分辨率的提升效果。
1 理论研究
1.1 OFDR 系统定位传感原理
图1 为OFDR 光纤传感系统原理图。当OFDR系统工作时,扫频光源模块发出频率随时间t线性变化的扫频光E(t),其瞬时光场强度如下:

图1 OFDR 光纤传感系统原理
式中:EL为光强,γ为扫频速率,f0为起始频率,φ(t)为初始相位。
扫频光E(t)通过耦合器分为两束,一束进入参考臂作为参考光,另一束进入测量臂作为测量光。测量光在待测光纤上不同位置引发的后向瑞利散射信号通过环形器返回,与参考光在耦合器C2汇合[13]。
设参考臂长为Z0,测量臂长为Zi,而测量光从进入待测光纤到返回探测端经过的光程为2Zi,则待测光纤上任一位置散射点所返回的后向散射光与参考光的光程差为Z=2Zi-Z0,由于参考臂长Z0远小于测试臂长Zi,可忽略不计,因此待测光纤上任一位置散射点的后向散射光与参考光在到达探测端的时间差为2τi,其中:
待测光纤中各散射点的后向瑞利散射信号Ei(t)叠加组成的后向瑞利散射光与参考光在光电探测器上会发生拍频干涉得到探测信号I(t):
式中:R(2τi)为随距离而衰减的后向瑞利散射系数,c为真空中光速,n为光纤折射率[14]。
由式(3)可得,在拍频探测信号中,非直流部分是由相对应待测光纤上的点Zi的后向瑞利散射光信号叠加而组成的,根据式(2)可知,该部分信号的频率分量2γτi与待测光纤上的各散射点物理位置相互对应。
当外部温度发生变化时,受温度变化影响的待测光纤上散射点的后向瑞利散射信号的频率会发生偏移。通过采集温度变化前和温度变化后,两次不同条件下探测信号,通过快速傅里叶变换(Fast Fourier Transform,FFT)得到其频域信号,对该频域信号进行加窗分段截取,再将加窗截取信号通过逆快速傅里叶变换(Inverse Fast Fourier Transform,IFFT),得到待测光纤截取位置的后向瑞利散射信号,通过重复移动窗截取,即可得到分布于待测光纤上的后向瑞利散射信号。对两次采集的探测信号的差异性进行分析解调,即可定位温度变化的位置。
1.2 频域插值和窗宽优化方法
OFDR 解调时采用互相关解调算法来对比温度变化前采集到的参考信号和温度变化后的测量信号的差异性,以此定位温度变化的位置[15]。在无温度变化的位置,参考信号和测量信号相似程度很高,互相关结果只在固定位置有明显的互相关峰;在有温度变化的位置,两组信号相似度较低,此时互相关峰会发生明显偏移。具体来说,该过程中使用的离散信号的互相关函数为:
式中:f和g分别为参考信号和测量信号,N为信号数据点数,即距离域中选择的窗宽大小。
具体流程如图2 所示,首先进行数据采集,在对传感光纤施加温度变化前,采集一组数据作为参考信号,在对传感光纤局部位置施加一定的温度变化后再采集一组数据作为测试信号。对两组信号进行FFT,将探测信号从时域转为频域,频域数据与传感光纤长度互相对应,作为定位信息。对两组信号的频域数据进行分段截取,以一定的窗宽N将数据截断,每段窗宽所截取的频率分量即对应传感光纤物理位置。对加窗截取后的信号进行IFFT 得到该截取位置的时域信号,将对应位置的参考信号和测量信号的时域数据进行互相关运算,即可得到该位置的差异信息,重复上述过程可实现待测光纤上温度变化的定位[16]。

图2 OFDR 传感解调流程
从上述解调过程可以得出,温度变化转换成了互相关结果的偏移,而互相关是对参考信号和测量信号加窗分段之后的时域进行的,因此截取后时域信号的质量影响着互相关结果的精度,也就对应着系统温度定位准确度。系统空间分辨率则与频域截取时所加的窗宽大小有关。
具体而言,系统空间分辨率由频域选择的窗宽大小N和系统的两点空间分辨率Δz共同决定,表示为:
由式(2)可知,由于所得后向瑞利散射光与参考光的光程差近似为参考臂长的两倍,在扫频速率为γ的线性扫频光的作用下,待测光纤上距离为Zi的后向散射点的位置可表示为:
式中:ng为光纤折射率,c为光速,fi=γτi为外差拍频频率,对等式两边同时求微分可得:
式中:Δf为系统距离域外差信号的相邻两点间的频率差,即系统的频率分辨率。在采样时间Ts和扫频时间相等T1的情况下,将频率分辨率转化为采集卡的采样率,两点空间分辨率Δz可表示为:
代入式可(5)得,系统空间分辨率为
由式(9)可得,在扫频范围ΔF确定的情况下,系统空间分辨率与解调窗宽成正比,随窗宽增大而趋于恶化。
通过上述原理分析,为得到最优系统空间分辨率,应选择尽可能小的窗宽。然而,窗宽的选择同时影响了参与互相关信号的波长分辨率,如果选择的窗宽过小,则分段截取后时域信号互相关的数据点数过少,将导致系统波长分辨率δλ较差,造成定位准确度恶化。即:
在此基础上,本文提出频域插值和窗宽优化解调方法,具体流程如图3 所示。

图3 频域插值和窗宽优化解调方法
频域插值和窗宽优化方法在频域数据加窗截取的N位数据点的基础上进行了插值,使得参与IFFT的分段信号包括N+M位数据点,通过插值后的局部距离域数据经IFFT 后得到的时域信号更加细化,进而提高系统的测量精度,此时系统波长分辨率表示为:
该方法仅对参与互相关的光谱进行了细化,提高了系统的波长分辨率,而未改变窗宽的大小,系统空间分辨率不会下降。因此,通过此方法,可在比传统解调方案窗宽更小的前提下,获得与传统解调方案在较大窗宽条件下中同等的波长分辨率,进而实现高精度、高空间分辨率的测量。但是由上述原理可知,插值位数的增加会导致系统有效传感信号在解调信号中的权重降低,插值位数过大会导致传感结果不可靠。因此,必须综合考虑多方面因素,选择合适的窗宽和插值位数,在保证定位精度的同时,尽可能提高系统空间分辨率。
因此,本文进一步通过求得数字化后传感定位结果与理论定位结果的均方根误差(Root Mean Squared Error,RMSE),将其定义为系统传感定位误差,由此实现对定位误差的量化。可表示为:
式中:yi为测量数据,xi为理论数据,N为数据点数。
通过调整不同窗宽和插值位数规模,并以系统传感定位误差为依据,评估不同窗宽以及插值位数情况下系统的空间分辨率及定位精度,将评估得到的定位误差最小值作为此系统窗宽与插值位数的最优解,以此提高系统空间分辨率。
2 温度定位实验与结果分析
2.1 实验设计
图4 为基于微波扫频的外调制OFDR 系统。扫频光源模块主要包括1 550 nm 的窄线宽激光器、微波源以及IQ 调制器,通过利用IQ 调制器的电光效应把微波源发出的扫频电信号施加到电光晶体上,将窄线宽激光器发出的单频光调制为功率恒定、相位连续且频率随时间线性变化的扫频光,该扫频光经分光比为1 ∶99 的光纤耦合器分为两路。1%的光经过光电探测器转换为偏置电信号为偏压板提供反馈偏压参考,对生成的扫频光进行实时调整,保证扫频光的稳定。耦合器输出的99%的光进入探测模块,经耦合器后再次被分为两路,1%的光作经过偏振控制器和偏振分束器后分为偏振态互相垂直的参考光,99%的光通过环形器进入待测光纤中作为测量光。传感光纤的后向瑞利散射信号经环形器返回,通过偏振分束器与参考光在偏振分集接收系统中汇合并进入采集模块。参考光和测试光在采集模块中发生拍频干涉得到光外差探测信号,并通过采集卡进行采集。
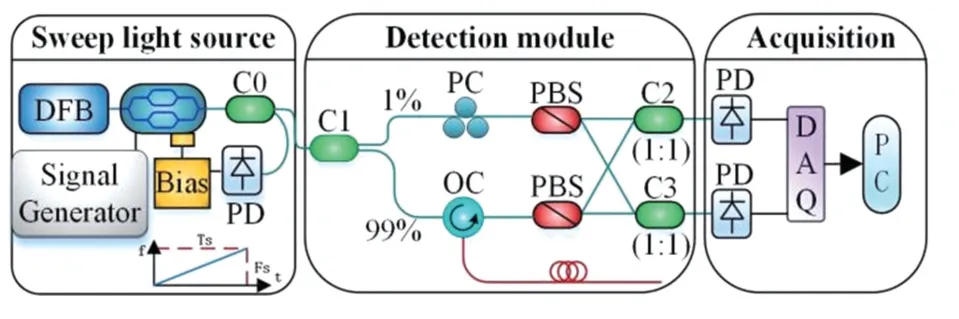
图4 外调制OFDR 系统
实验中,使用的待测光纤总长度为1 000 m,并将起始位置为690 m,长度为30 m 的光纤段放入恒温水浴箱中,其余光纤置于常温环境。将微波源扫频范围设置为12.8 GHz~16.0 GHz,扫频时间设置为0.01 s,扫频速率为320 GHz/s,通过式(8)可知,本系统对应的两点空间分辨率为3 cm。
首先将恒温箱温度设置为50 ℃并使其保持稳定,采集此时系统的拍频信号将其作为参考信号;再将温度设置为60 ℃并使其保持稳定,采集此时系统的拍频信号将其作为测量信号。
将参考信号和测量信号经过FFT 变换到频域,信号的频率分布对应着光纤的物理距离分布。对两组频域信号进行加窗截取并进行插值,将截取插值后的频域数据进行IFFT,得到待测光纤在频域截取对应位置的瑞利后向散射光谱信号。
通过互相关计算两组瑞利后向散射光谱信号的差异性,获得待测光纤上该位置的温度变化情况。移动频域加窗截取位置并重复上述解调过程,即可获得整条待测光纤上各位置的温度变化情况。
2.2 实验结果分析
通过上述实验方案分别采集到参考信号和测量信号,对两组信号进行FFT 转换到频域,结果如图5所示。光纤尾端位置频率为3.14 MHz,符合实验预期。

图5 探测信号频域
通过对频域数据进行加窗截取,发现当窗宽较小时互相关点数较少,导致互相关结果出现杂峰,对温度定位产生影响。如图6(a)为窗宽为100、无插值时的解调结果,除了温度变化位置690 m~720 m处产生定位峰,在温度变化以外的位置950 m 处产生了杂峰,导致定位结果不准确。而如图6(b)所示,通过频域插值在窗宽为100、插值位数为1 000的情况下,杂峰被消除,误定位现象得以解决。因此在相同窗宽下,通过频域插值互相关算法能够有效消除误差峰,提高系统定位准确度。

图6 窗宽100 时无插值及插值位数1 000 解调结果
为了对定位误差进行评估,将图6 进行数字化阈值处理,将解调结果中幅值小于0.1 的点变为0,视为无温度变化;将幅值大于0.1 的点变为1,视为存在温度变化,由此得到图7 所示的数字化温度变化定位结果。

图7 数字化后定位结果
同时,将理论定位结果数字化,即在690 m~720 m位置处的幅值为1,其他位置为0,作为评估定位误差的基准数据,如图8 所示。
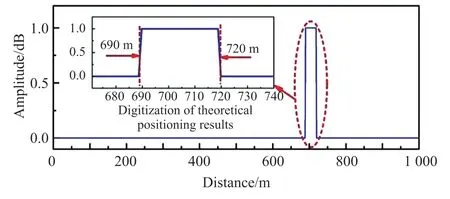
图8 理论定位结果数字化
通过计算实验定位结果与理论定位结果之间的均方根误差,动态调整系统窗宽与插值位数,评估不同插值位数和窗宽下的定位误差,得到图9(a)所示结果。将图9(a)中获取的不同插值位数下,定位误差最小的窗宽作为最佳窗宽,得到图9(b)所示的最佳窗宽随插值位数的变化规律。

图9 不同窗宽和不同插值位数曲线图
从图9(b)中可看出,系统最佳窗宽随插值位数增大而呈阶梯状减小,且在插值位数达到450 时,最佳窗宽达到最小值50,此处对应最优空间分辨率1.5 m。由于之后继续增大插值位数并不会进一步改变空间分辨率,反而会导致过度插值带来的解调可靠性降低,因此,在插值位数为450,窗宽为50时,系统的综合性能达到最佳。
图10 为无插值与插值后窗宽-误差曲线对比图,通过对比得出,传统方法数据解调得到误差最小时的最佳窗宽为100,即系统空间分辨率为3 m,而利用频域插值方法进行数据解调得到的最佳窗宽为50,即系统空间分辨率优化至1.5 m,优化率达到50%,表明通过频域插值及窗宽优化方法能有效提高系统空间分辨率。

图10 无插值与插值后窗宽-误差曲线对比图
采用最佳窗宽为50 及对应的插值位数为450对传感数据进行解调,得到的定位结果及数字化后的定位结果如图11 所示。尖峰位置在690 m~720 m位置处,与加热位置吻合,定位结果准确。

图11 最佳窗宽及对应的插值位数下的定位结果
3 结论
本文提出了基于频域插值和窗宽优化的OFDR系统数据处理方案。在数据处理过程中,通过频域插值提高了外调制OFDR 系统的定位准确度,并评估系统定位误差,确定系统最优窗宽及插值位数规模,进而在保证高定位准确度的前提下优化了系统的空间分辨率。基于上述方案搭建了外调制OFDR温度定位传感系统,并通过最优插值窗宽优化方案进行信号解调。实验结果表明,在插值位数为450,窗宽为50 时,实现了在1 000 m 待测光纤上,1.5 m的系统空间分辨率,相较传统解调方案提升近1 倍。研究结果为外调制OFDR 系统提供了一种空间分辨率提升软件解决方法,无需增加硬件成本,本方法也可推广至基于可调谐激光器的常规OFDR 系统。
