绝对式多极磁感应角位移测量系统的技术研究∗
2023-11-29叶大伟彭雪峰严春平
娄 敏,叶大伟,彭雪峰,严春平
(九江职业技术学院电气工程学院,江西 九江 332000)
本文所涉及的是一种多极磁感应角度传感器,学名为圆感应同步器,其基体为金属材质,且无类似光电式角度传感器所需的光源等寿命损耗器件,因而产品的使用寿命长、环境适应性好。由于这种磁感应角度传感器具有耐恶劣环境、测量精度高、寿命长等诸多优点,因而其应用领域遍及航天、航空、机械制造、精密仪器等[1-2]。
传统的磁感应角度传感器(圆感应同步器)为单通道模式,不具备绝对零位,为实现绝对零位功能可将其设计为双通道模式,双通道模式下外通道被设计为多对极,内通道被设计为单对极,多对极的外通道决定着整个测角系统的精度,单对极的内通道决定着绝对零点的位置[3-7]。
文献[3]中设计了相应的励磁和信号调理模块,通过解算单元获取了粗精通道角度信息,采用谐波注入的方法,将粗精通道的数据进行了融合。
文献[4-5]中设计了高精度、高稳定度的测角系统,并提出了一种粗精数据融合方法,对粗通道和精通道数据进行了有效处理。
文献[6]中针对双通道零位偏差导致的数据融合问题,介绍了一种利用实测精级数据过零点找粗级起始点,并进行四区间判读的方法进行粗精融合。
文献[7]中结合双通道测角系统的特点,提出一种查表实现粗精耦合的方法,阐述了建立粗精相关表及查表得到绝对角度的过程,应用查表法实现粗精耦合,提高了粗精角度数据融合的可靠性。
文献[8]中以绝对式圆感应同步器作为角度传感器,采用总体开环和数字信号处理部分闭环的方案,设计了绝对角度测量系统。
无论文献[3-8]中哪一类双通道粗精解码方法,虽然都能实现绝对零位测角,但在应该用过程中不可避免地带来如下不便之处:
①扩大了系统的体积
为实现绝对零位功能而增加的这一个内通道绕组,必然会大幅增加传感器的结构尺寸,这在一些对空间集成度要求较高的应用场合将带来不便。
②增加了系统成本及复杂性
对于新增加的内通道绕组,需另配一套电路系统对其进行解码处理,这进一步增加了整个测角系统的成本及复杂度。
基于此,本文提出一种全新的设计方案,无需增加内通道,而是利用U 型槽光电传感器来实现绝对零位功能,从而在降低系统尺寸、成本的同时还提升了可靠性。
由于U 型槽光电传感器的结构简单、应用成熟、可靠性高,且光电信号与本文所涉及角度传感器的电磁信号不会互相干扰,因而适合作为零位触发传感器在系统内进行集成。
1 设计原理
1.1 多极磁感应角度传感器工作原理
多极磁感应角度传感器(圆感应同步器)分为定子、转子两个部件,其中转子被安装在旋转轴系上,定子被安装在固定的台体上,如图1 所示,通过将交流激励信号施加到转子上驱动其工作,定子将感应出同频率的2 路正交的差分SIN+/-、COS+/-信号,且SIN+/-、COS+/-信号与旋转轴系机械转角呈一定比例关系,对其解码即可得到当前旋转轴系转过的角度值。

图1 角度传感器工作示意图
为实现角度电磁耦合效应,角度传感器的转子被设计为连续绕组,如图2 所示。

图2 转子连续绕组图
由图2 可见,转子的连续绕组包含有效导体、内端部及外端部,定义有效导体的数目即为角度传感器的极数,对于720 极(360 对极)的角度传感器,其有效导体数目为720。
为实现两路正交感应信号,角度传感器的定子被设计为分段绕组,如图3 所示。

图3 定子分段绕组图
定子分段绕组由2 K 个导体组组成,如图所示,导体组分属SIN、COS 两2 相,每相均有K 个导体组,SIN、COS 这两项导体组交错间隔排列,同相的导体组通过导线相互连接。
角度传感器定、转子实物图如图4 所示。
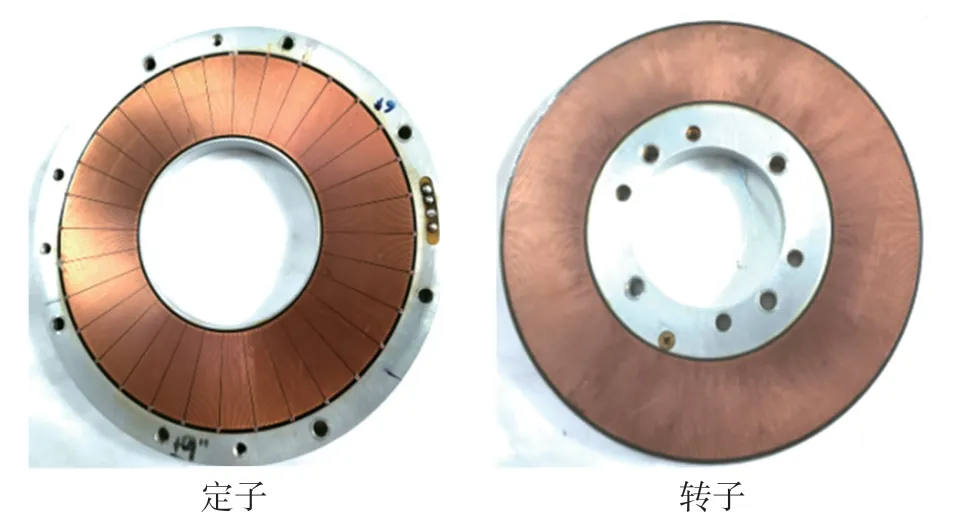
图4 定、转子实物图
设转子连续绕组激磁信号为:
在静态和低速条件下,定子SIN 相绕组的输出电势为:
式中:ku为电压耦合系数;ω为激磁电压角频率;αD为转子连续绕组与定子SIN 相分段绕组之间的偏离角度(电角度),令定子分段绕组的SIN、COS 相导体组在空间相位上相差90 度电角度,即两相绕组正交,则COS 相绕组的输出电势为:
将usin、ucos接入正余弦数字函数变压器,得到输出信号为:
式中:ke为数字函数变压器比列系数,φD为数字函数变压器角变量。
取双端输出之差值为:
式中:k=keku。
由上式可以看出,不论kUmsin(ωt)为何值,只要适当地改变φD的大小,令αD=φD,使输出电压usc为零,此时的可知变量φD就等于转子连续绕组相对定子SIN 相分段绕组之间的偏离角度(电角度)。
对于720 极的角度传感器,其对极数为360,即转子相对定子转过1 个电角度周期,对应机械上转过1°。
1.2 绝对零位设计原理
由于传统的多极磁感应角度传感器为增量式,对于720 极(360 对极)的角度传感器在360°范围内共有360 个对极,即有360 个电气零点,为实现绝对零位测角,本文设计一种集成光电传感器的绝对式测角方案,其结构示意如图5 所示。

图5 集成了光电传感器的系统结构示意图
如图5 所示,在转子上固定一个遮光片,在定子上安置一个光电传感器,光电传感器安装完毕后,每当转子带动遮光片通过光电传感器的U 型槽,则光电传感器的输出端会出现一次电平由高到低的跳变,当电路系统接收到这个跳变,则将当前对极所在的电气零点作为系统的绝对零点,每次测角系统上电执行一次寻零操作,即可在增量式测角系统内实现绝对零位功能。
多极磁感应角度传感器在360°范围内共有360个对极,光电传感器在定子上安装的位置不同,每次过零触发所在的对极不同,在定子上安装光电传感器需避免过零触发位置在两个不同对极的交界处,从而保证每次过零发生在一个固定的对极内,进而使得绝对零位恒定为这个对极的电气零点。
2 电气系统设计
2.1 硬件设计
多极磁感应角度传感器需要后续的电气系统对其进行信号处理才能实现完整的角度测量[9],电气系统的硬件包括解码板和信号调理板两部分,其中解码板内又分为主控单元、AD 单元、激励单元、显示单元、零位单元;信号调理板内又分为放大单元和滤波单元,如图6 所示,下面对各单元电路分别进行介绍。

图6 电气系统功能单元图
①主控单元
主控单元选择 FPGA 控制器,型号为EP2C5T144I8,EP2C5T144I8 是一款工业级的FPGA芯片,其引脚数为144,逻辑块为4608,可满足本项目的控制需求。
②AD 单元
AD 单元以美国ADI 公司研制的AD2S1210 为核心器件进行构建,AD2S1210 芯片分辨率在10/12/14/16 位可设,且芯片具有外围配置元件少、转换速率高的特点,同时该款芯片还能直接输出10KHz 的交流正弦信号[10-11]。
③激励单元
激励单元原理如图7 所示,可将AD2S1210 芯片输出的10 kHz 交流正弦信号EXC 经射极跟随、隔直、功率放大后输出大电流的驱动信号(VOUT),将VOUT 驱动信号传输到磁感应角度传感器转子上即可驱动其工作。
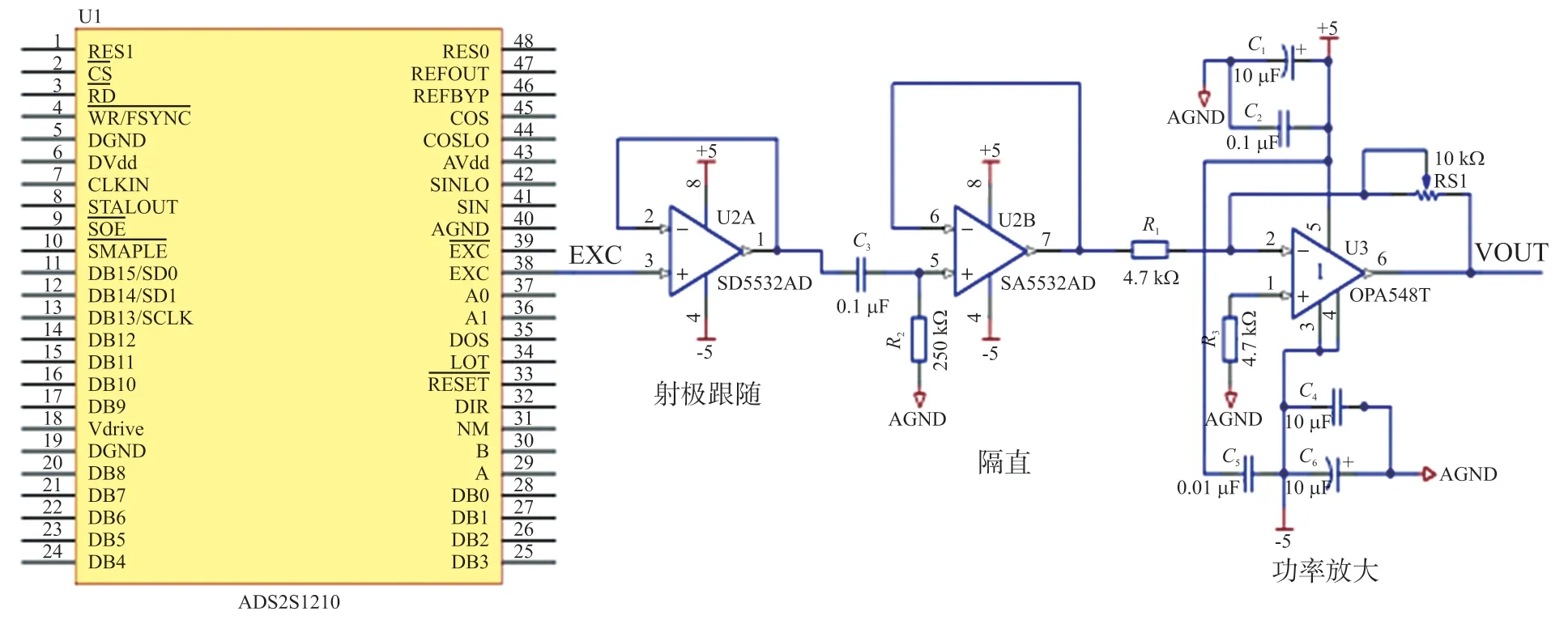
图7 激励单元电路图
④显示单元
解码后的角度值数据将通过显示单元上的数码管显示出来,显示单元的核心器件为MAX7219 串行显示控制芯片,MAX7219 是美国MAXIM 公司推出的多位LED 显示驱动器,采用3 线串行接口传送数据,可直接与微控制器连接,用户能方便修改其内部参数,以实现多位LED 显示,它内含硬件动态扫描电路、BCD 译码器、段驱动器和位驱动器。
⑤零位单元
零位单元主要用于驱动及接收U 型光电传感器,其实物如图8 所示,U 型光电传感器的工作原理是通过对红外发射光的阻断和导通,再根据红外接收管感应出的电流变化来实现开和关的判断。U 型光电传感器的发射器和接收器分别位于U 型槽的两边,并形成一光轴,当被检测物体经过U 型槽且阻断光轴时,光电传感器就产生开关量信号通过OUT 端输出。
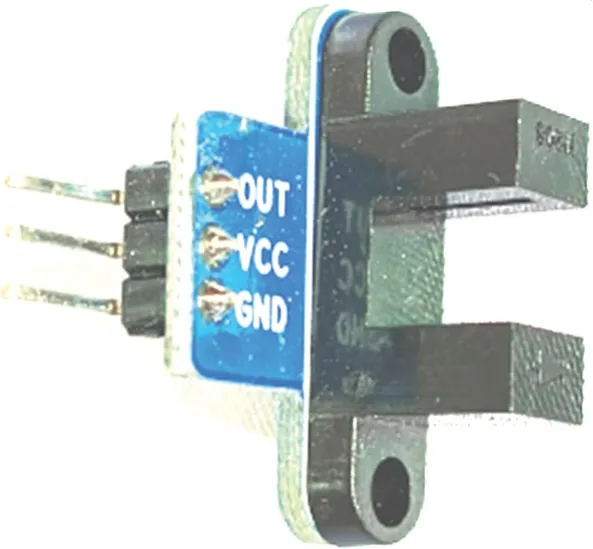
图8 U 型光电传感器实物图
⑥放大单元
放大单元主要用于将定子感应出的毫伏级微弱信号进行放大,测角系统电气误差主要来源于绕组设计制造误差[12]及信号调理误差(放大、滤波)[13]、这个环节直接影响整个系统的测角精度,对传感器直接输出的微弱信号进行一级放大需采用高精密的差分放大器进行处理[14-15],放大单元的原理如图9所示,放大单元选择INA163 芯片做为前级放大芯片进行微弱信号处理,INA163 芯片是具有极低噪声和失真度的单片仪表放大器,采用电流反馈电路,具有非常宽的频带宽度和优越的动态响应特性,可在商用级和工业级温度范围内应用,利用INA163 芯片对原始的定子感应输出信号进行100 倍放大后即可送入滤波单元进行调理,如图9 所示,定子感应出SIN+/SIN-差分信号经INA163 芯片进行放大后转为单端的SIN 信号,同理定子感应出COS+/COS-差分信号也可经放大后转为单端COS 信号。

图9 感应信号放大电路图
⑦滤波单元
传感器输出信号经放大后还存在较大的杂波,因而在放大电路后设计了一个带通滤波器,此带通滤波器采用先低通滤波,再高通滤波的设计方案。
A.低通滤波器设计
低通滤波电路如图10 所示。
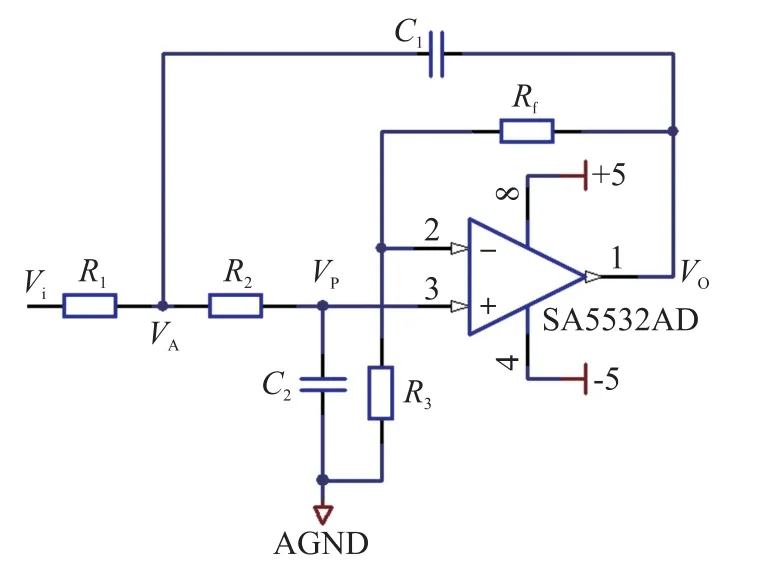
图10 低通滤波电路图
如图10 所示,Vp=其中Vp为运放的同相输入端电压,VO为输出电压,AVF为反馈放大倍数,根据电路进行分析得到Vp与VA的关系:
根据基尔霍夫定律又可得到:
进一步转化得到如下公式:
则式(8)可转化得
令R1=R2=R、C1=C2=C,则式(9)简化为
设定品质因数Q=0.707,由式(13)可得AVF=1.58,又由式(12)得出=0.58,在此设定Rf=9.1 kΩ,R3=15 kΩ,设定上限截止频率为12 kHz,令电容C1=C2=C的值为4.7 nf,则根据式(14)可算得R1=R2=R=2.8 kΩ。
B.高通滤波器设计
完成了信号的低通滤波后,再对信号进行高通滤波[16],其电路原理如图11 所示。

图11 高通滤波电路图
在此将高通滤波器的下限截止频率设定为8 kHz,品质因数Q=0.707,令电容C3、C4的值均为4.7 nf,参照低通滤波器设计分析过程,可计算出高通滤波器的参数值:R4=R5=4.2 kΩ,Rt=9.1 kΩ,R6=15 kΩ。
2.2 软件设计
图12 为电气系统软件流程图,按功能可分为5个部分,分别是AD 读取子程序、零位子程序、解码子程序、数码显示子程序、通信子程序,其中AD 读取子程序用于对AD2S1210 芯片进行配置并对原始模拟感应信号进行AD 转换得到数字量;零位子程序用于监测当前光电传感器的输出值并将其传递到主控单元;解码子程序用于对AD2S1210 转换输出的数字量信号进行融合处理,并结合光电传感器输出值进行计算得出当前的角度数据;显示子程序用于驱动max7219 芯片实现角度数码显示;通信子程序用于将角度值以一定的通信协议格式(如RS422/485)发送给用户系统。
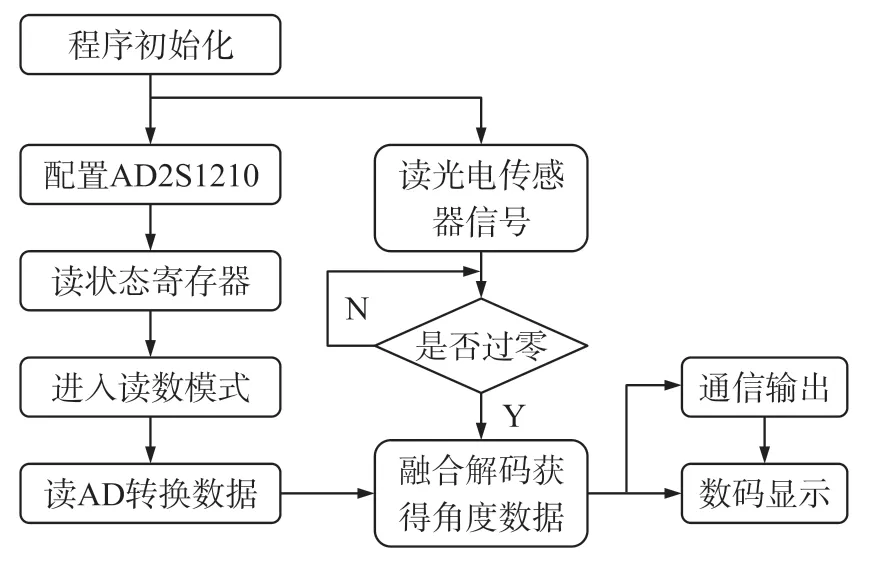
图12 软件流程图
3 实验验证
3.1 绝对零位功能验证
将多极磁感应角度传感器的定、转子分别固定在转台的台体及旋转轴上,光电传感器固定在定子上,遮光片固定在转子上,将解码板、信号调理板与磁感应角度传感器相连接,解码后的角度值通过数码显示出来,如图13 所示。

图13 测角系统组成图
如图14 所示,将光电传感器固定在磁感应角度传感器的定子上,将遮光片固定在磁感应角度传感器的转子上,对传感器正常解码显示角度数据,随着转子带动遮光片进入光电传感器的U 型槽内,则光电传感器将输出一个脉冲信号,为后续电路系统接收,则在电气系统内对角度值的整度数进行清零,角度值的小数位被保留,从而当前对极的电气零点就被设定为了绝对零位,进而实现了绝对零位的测角功能,其过零过程中的角度数据变化如图15 所示。

图14 零位功能部件实物图

图15 过零过程角度数据变化趋势图
如图15 所示,系统上电后转动转子带动遮光片接近光电传感器的U 型槽,在这个过程中,角度值不断在增加,直到增加到9.782 3°之后继续转动转子使得遮光片进入U 型槽内触发光电传感器输出脉冲,电气系统则将当前角度值的整度数清零,只保留角度值的小数位,因而由图15 可见,当前的角度值突变到了0.892 2°,当前对极的电气零点即被记为测角系统的绝对零点。
进一步利用自准直仪及多面棱体构建测试平台[17-18],对测角系统的绝对零点重复性进行验证,测试过程中所用的硬件设备如下:①7 英寸360 对极磁感应角度传感器;②传感器后续电气处理系统;③HK-J1 精密转台;④99 型光电数显自准直仪(包含光轴和数显2 部分,精度为0.1″);⑤23 面棱体。
构建完成的测试装置实物如图16 所示,测角系统绝对零位重复性测试过程介绍如下:
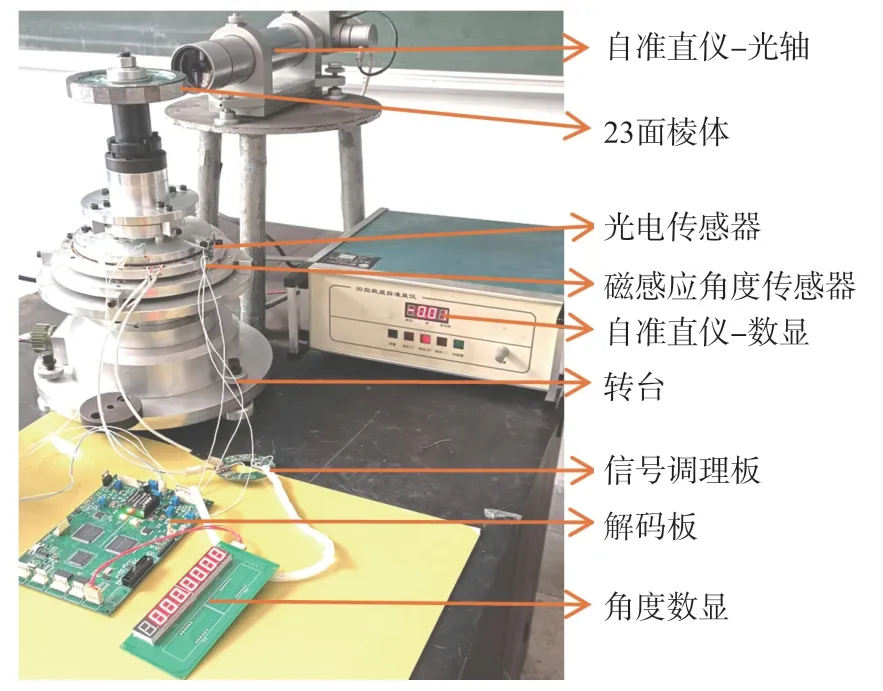
图16 测角系统及测试装置图
如前所述,测角系统上电后需要有一个找零的过程,当转子带动遮光片进入光电传感器的U 型槽内即触发了脉冲输出,电路系统接收到脉冲后将使得测角系统角度值的整度数被清零,只保留角度值的小数位,随后调节转台使得测角系统角度值输出为0 的位置即为系统的绝对零点,保持绝对零点位置不变,调节23 面棱体的第1 面与光电自准直仪的光轴垂直,此时可观测到光电自准直仪的输出也为0。
对测角系统重新上电,重复实现找零的过程,观测重复找零后测角系统在绝对零点位置处光电自准直仪的显示值,这个显示值即为测角系统绝对零位重复性误差值,实验中对测角系统绝对零位重复性的测试数据如表1 所示。
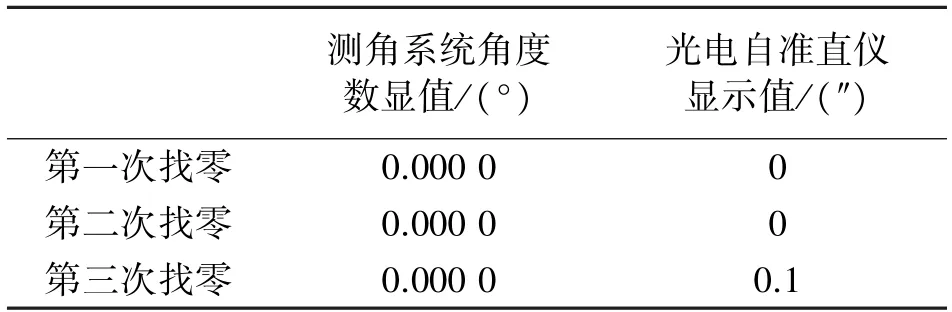
表1 绝对零位重复性测试表
由表1 可见,对集成光电传感器实现的测角系统的绝对零位重复性进行了3 次测试,最大重复性误差值为0.1″,与双通道方案实现的绝对零位重复性相似。
常规的多极磁感应角位移测量系统在360°范围内共有360 个对极,每个对极有1 个电气零点,本文涉及的方案是将光电传感器安置在多极磁感应角位移传感器的某一个对极空间内,在光电传感器被触发后即以这个对极的电气零点作为绝对零点,从而避开了光电传感器零位重复性不高的缺陷。
3.2 测角精度验证
利用3.1 节中所构建的测试平台,可对测角系统的精度进行验证。
测量系统精度时,首先令转台的旋转轴转动,使得角度数显输出为0,保持此状态,调节23 面棱体的第1 面与自准直仪的光轴完全垂直,此时可观测到自准直仪数显的输出也为0,这个状态即为测试的初始原点状态。
令转台的旋转轴转动使得角度数显输出为15.652 2°,此时23 面棱体的第2 面将与自准直仪的光轴对准,光轴与棱体面的不垂直度可通过自准直仪数显的输出观测到,这个输出值即为测角系统在15.652 2°角位置处的误差值,按此方法等15.652 2°间隔可依次测试15.652 2°、31.304 3°、46.956 5°、62.608 7°、78.260 9°、93.913 0°、109.565 2°、125.217 4°、140.869 6°、156.521 7°、172.173 9°、187.826 1°、203.478 3°、219.130 4°、234.782 6°、250.434 8°、266.087 0°、281.739 1°、297.391 3°、313.043 5°、328.695 7°、344.347 8°这些位置处的角度误差值,测试结果如表2 所示。
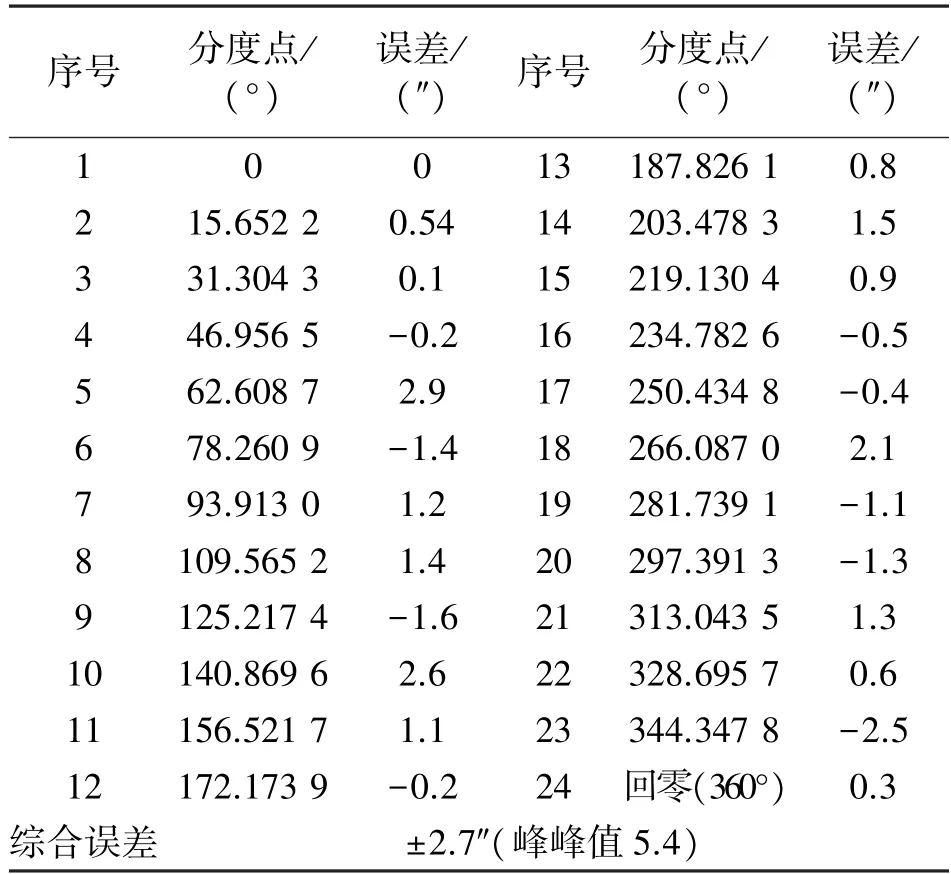
表2 测角系统23 面分度误差测试数据表
测角系统实测分度点误差见表2 的第3、第6列,分度点的误差最大值为2.9″,最小值为-2.5″,取误差峰峰值的一半记为综合误差,即±2.7″。
4 总结
本文介绍了一种绝对式多极磁感应角位移测量系统,文中首先对角度传感器的工作原理及零位实现方案进行了阐述,随后详细介绍了传感器后续电路系统的硬件及软件实现方案,重点论述了光电传感器及信号调理部分的技术路线,最后搭建了实验平台对绝对零位功能进行了验证,并对测角精度进行了标定,验证了本文所涉及绝对零位及高精度测角方案的可行性,本文所涉及的绝对零位实现方案可在旋转变压器等多极磁感应角位移传感器中进行推广应用[19-20],具有一定的行业覆盖性。
