导流罩对推流器性能的影响研究
2023-11-27张金金葛新峰杨修远杨孝才
张金金,林 路,葛新峰,程 诚,杨修远,杨孝才
(1.河海大学能源与电气学院,江苏 南京 210098;2.南京蓝奥环境科技有限公司,江苏 南京 211500;3.南京蓝奥环保设备有限公司,江苏 南京 211500)
0 引言
“双碳”战略倡导绿色、环保、低碳的生活方式。加快降低碳排放步伐,有利于引导绿色技术创新,提高产业和经济的全球竞争力。近些年,随着我国对于环境问题的逐渐重视,再加之潜水推流器具有安装方便,易于维护,操作简单等优点,伴随着潜水机电的设计和制造工艺不断地进步,潜水推流器已经成为了我国非常重要的污水处理设备[1]。潜水搅拌机及泵一般都是连续地运行,电力消耗是生命周期成本的重要因素。如何能高效节能地提高潜水推流器的性能是污水处理行业一直追求的目标[2]。
对于潜水推流器的研究主要有试验研究和数值计算两部分,但由于试验研究的局限性,大多数学者采用数值模拟的方法更为普遍,有关的试验研究还较为缺乏。田飞[3]等人对潜水式搅拌机搅拌的污水处理槽进行数值模拟,分析了整个槽内流体的宏观流场和各截面速度分布,并分析了潜水式搅拌机的轴向有效推进距离和水截面的有效扰动半径。任向轩[4]等人研究出随着叶片安放角的增加,潜水式搅拌器的轴功率以及推力不断增大,叶片压力面高压区域也在逐渐增大。龚发云等[5]人以潜水式搅拌器桨叶为研究对象,探索其参数对搅拌效果的影响规律。SZULC[6]等着重探究了潜水式搅拌器性能评价的方法,并开展实验,将实验结果与用稳态数值模拟分析得到的结果进行了对比。BŁOŃSKI[7]等提出了一个具有已知几何结构的潜水推流器试验,测量了推力、转矩、转速和电动率,采用理论方法对CFD 结果进行了验证。CHOI[8]等在文章中预测了潜水式搅拌器的性能,探讨了叶轮设计参数对性能特性的影响。
本文采用试验与CFD 相结合的方法,对安装导流罩推流器和未安装导流罩推流器的下水运行过程进行试验研究,利用称重传感器测量,计算得出不同工况下两者推力和功率的大小关系。采用CFD 模拟方法,对两者进行非定常计算,分别对速度云图、推功比、有效推进距离进行分析,以此揭示两者运行过程中的特性和规律,为潜水搅拌机优化提供参考依据。
1 试验研究
1.1 推力和功率测量机构设计
推力和功率是衡量潜水搅拌器性能的重要参数[9],推力和功率测量机构如图1(a)中所示,潜水推流器推力的测量有直接测量法。直接测量法是利用类似于图1(b)所示的布置结构,采用称重传感器直接测得的读数F1乘以一个系数之后便可以得到潜水搅拌器推力,基本原理与杠杆原理一致,实际测量装置的推力读数应为:
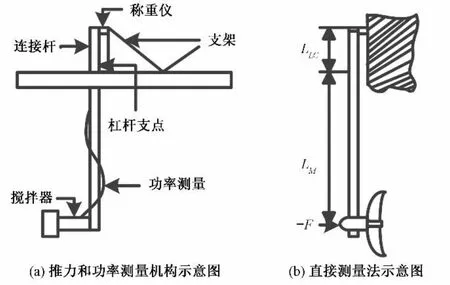
图1 试验设计Fig.1 Experimental design
式中:F和F1分别表示潜水搅拌器的推力和称重传感器所测得的推力;LM表示靠近推流器一端杠杆长度;LLC表示靠近称重传感器一端杠杆长度。
1.2 试验工况
试验考虑潜水推流器是否安装导流罩对推力和功率的影响。潜水推流器进行2 种工况方案的试验,具体方案如表1所示。
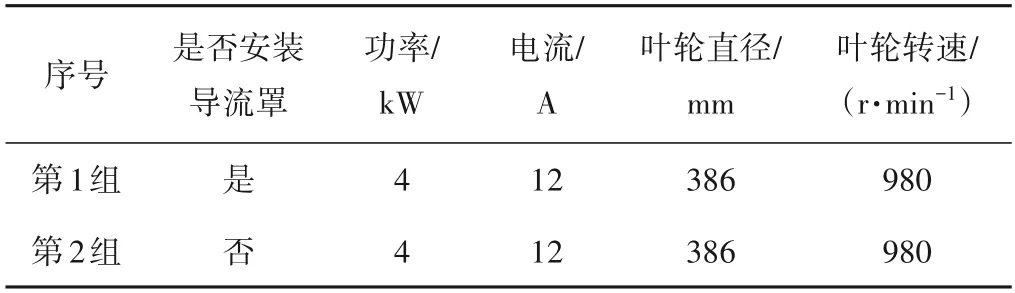
表1 潜水推流器试验工况Tab.1 Submersible thruster test conditions
1.3 试验过程
图2(a)所示为安装在支架上的有导流罩的潜水推流器实物图,图2(b)所示为称重测力传感器实物图,它安装在整个试验装置的最上端。图2(c)所示为安装有导流罩的潜水推流器下水运行的过程。图2(d)所示为无导流罩的潜水推流器安装在支架上的实物图,图2(e)所示为未安装导流罩的潜水推流器的下水过程,图2(f)所示为记录结果。

图2 试验过程Fig.2 Experimental process
1.4 推力和功率测量
由推力机构的布置可知,杠杆两端长度、分别为1.05 m 和0.35 m,测量安装导流罩潜水推流器的称重传感器读数为2 220 N,未安装导流罩潜水推流器的称重传感器读数为2 931 N,根据称重传感器的读数带入到式(1)中便可以得到安装导流罩潜水推流器的装置实际测量到的推力读数应为740 N,未安装有导流罩的潜水推流器的装置实际测量到的推力读数应为977 N。选取的称重传感器量程至少应大于其读数,同时根据标准力测量的不确定性应满足小于2%的要求,选取DYLY-103 型称重传感器以及DY920 力值测控仪。通过采集仪器获得功率,安装导流罩的潜水推流器功率的功率读数为903 W,未安装导流罩的潜水推流器的功率读数为1 164 W。
1.5 试验结果
试验过程中记录的结果如表2所示,试验结果表明不同工况下安装导流罩的潜水推流器的推力和功率分别小于未安装导流罩的潜水推流器的推力和功率。

表2 潜水推流器试验结果Tab.2 Submersible thruster test results
2 模型建立
2.1 潜水推流器模型建立
采用软件UG12.0 进行建模。坐标系如图3(a)中所示,坐标原点位于转轮中心处,实验池长(沿X轴方向)14.78 m,宽(沿Y轴方向)6 m,水深(沿Z轴方向)3.5 m;潜水推流器布置在距离池底0.75 m、距离池壁1.5 m 处。潜水推流器分为两种,第一种不带有导流罩直径为386 mm,第二种带有导流罩直径为405 mm,由于转轮曲线较为复杂,故采用模型扫描的方法将实际数据直接导入至电脑中,并基于上述基本数据,构建直径为386 mm、高为120 mm 的圆柱形旋转域以方便软件计算。潜水推流器建模如图3(b)和图3(c)所示。

图3 坐标系、试验池模型及潜水推流器模型Fig.3 Coordinate system,test cell model and submersible thruster model
3 网格划分及无关性验证
采用ICEM 软件进行网格划分,整体采用结构化网格来划分试验池水池以及旋转域,如图4所示。
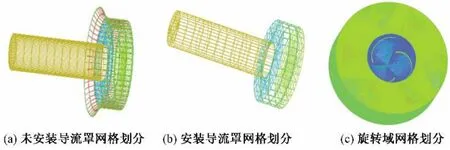
图4 导流罩及旋转域网格划分Fig.4 Mesh delineation of the deflector and rotational domains
如图5所示,对网格的无关性进行验证时,分别对网格的五种不同数量的划分方案(有导流罩为620 万、720 万、820 万、890万、960 万,无导流罩为600 万、700 万、800 万、870 万、940 万)进行计算,可以得到网格数量和推力的关系,随着网格数量的增加,理论推力趋于稳定。安装导流罩和未安装导流罩潜水推流器平均理论推力分别为756.4 N 和996.1 N,本文分别选用890万网格和870 万网格。

图5 网格总数-推力图Fig.5 Total number of grids-thrust diagram
4 数值模拟结果及分析
4.1 速度云图
为了探究叶片的出口流场,从叶片出口面向叶片方向(X轴负方向)截取平面,分别截取X=0.08 m、X=0.06 m、X=0.04 m、X=0.02 m处的速度云图作为研究对象。
如图6 和图7所示,未安装导流罩叶轮与安装导流罩叶轮的出口流场大体相似,流体在叶轮内轴对称地流动。安装导流罩潜水推流器明显小于未安装导流罩潜水推流器叶轮的出口流速。流体经过叶片旋转作用之后,与附近流体产生剪切应力,从而形成体积流,使得受控流体搅拌推流[10]。安装导流罩潜水推流器叶轮由于导流罩的限制作用,其小于未安装导流罩潜水推流器叶轮的出口流速。所以,安装导流罩的潜水推流器要比未安装导流罩的潜水推流器所受到的推力小,故安装导流罩潜水推流器小于未安装导流罩的潜水推流器的功率。
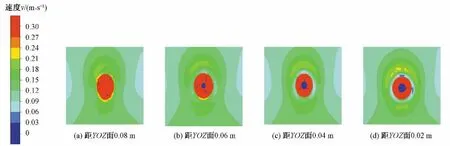
图6 安装导流罩叶轮出口处速度云图Fig.6 Velocity cloud at the outlet of the impeller with deflector installed

图7 未安装导流罩叶轮出口处速度云图Fig.7 Velocity cloud at the outlet of the impeller without the deflector cover
4.2 数模结果验证
转轮在试验池中运转,功率除去设备损耗之外应全部应用于克服流体压力以及黏性力做功,因此只要知道了流体对于转轮的扭矩以及转轮转速就可以计算出推流器的功率:
其中,M和分别n表示扭矩和转速,推流器的转速为980r/min。推流器推力与推流器功率的比值为推力功率比:
式中:F表示作用在潜水推流器上的推力;P表示推流器的功率。
安装导流罩的潜水推流器推力图和扭矩图分别如8 和图9所示。由图8 可以看出经过12.5 s,推力趋于平稳,为759.33 N。由图9 可以看出,经过9.7 s,扭矩值趋于稳定,为8.66 N·m。由以上分析可知,安装有导流罩的潜水推流器的推功比在12.5 s后趋于平稳,为0.85 N/W。
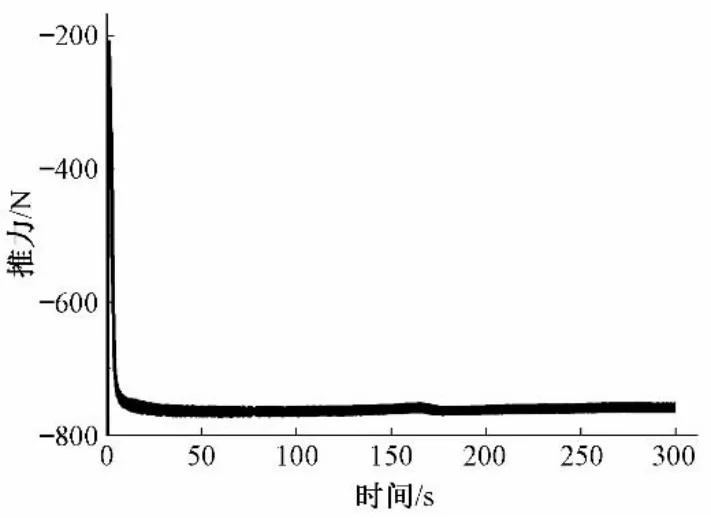
图8 推力图Fig.8 Thrust diagram

图9 扭矩图Fig.9 Torque diagram
未安装导流罩的潜水推流器的推力,经过6.32 s,推力趋于平稳,为1 003.39 N。未安装导流罩的扭矩,经过4.1 s,扭矩值趋于稳定,为11.16 N·m。由以上分析可知,未安装有导流罩的潜水推流器的推功比在6.32 s 后趋于稳定,为0.88 N/W。结果表明安装有导流罩潜水推流器的推功比小于未安装导流罩潜水推流器的推功比。
和实验结果对比分析,有无安装导流罩潜水推流器的相关数据如表3所示,由表3 中数据分析可知,潜水推流器所受到的水推力的理论模拟值大于试验值,需要考虑到水对导杆的阻力作用、轴承的传动效率和水力损失,从而使得潜水推流器所受到的水推力的理论模拟值大于试验测量值。而潜水推流器的理论模拟功率值要比试验测量功率值小,考虑到轴承等摩擦力的作用,从而使得潜水推流器功率的理论模拟值小于试验值。模拟值与试验值的误差在5%以内,结果说明了数值模拟的正确性和试验的可靠性,安装导流罩的潜水推流器的推力、功率以及推功比比未安装导流罩的潜水推流器分别要减小24.3%、22.4%、2.4%。
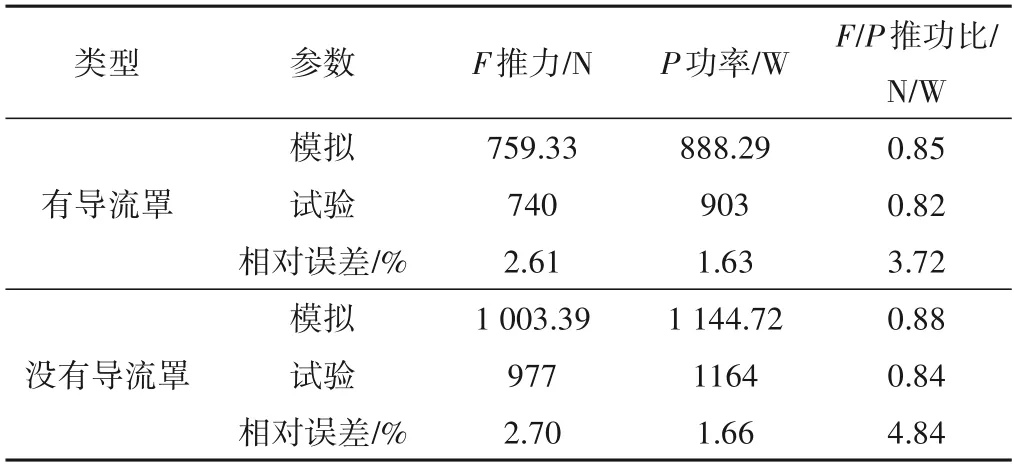
表3 推力和功率数模验证Tab.3 Thrust and power digital-analog verification
4.3 推流器有效推进距离
有效推进距离是衡量潜水推流器水力性能的主要指标之一,有效推进距离指在潜水搅拌器的有效工作区域内(保持流速大于等于0.3 m/s 的条件下)[11],其对水流产生推进作用的有效距离;搅拌器有效推进距离所能包含的池中区域越大其起到的搅拌效果越好,潜水推流器在转轮安装断面处速度云图如图10所示。
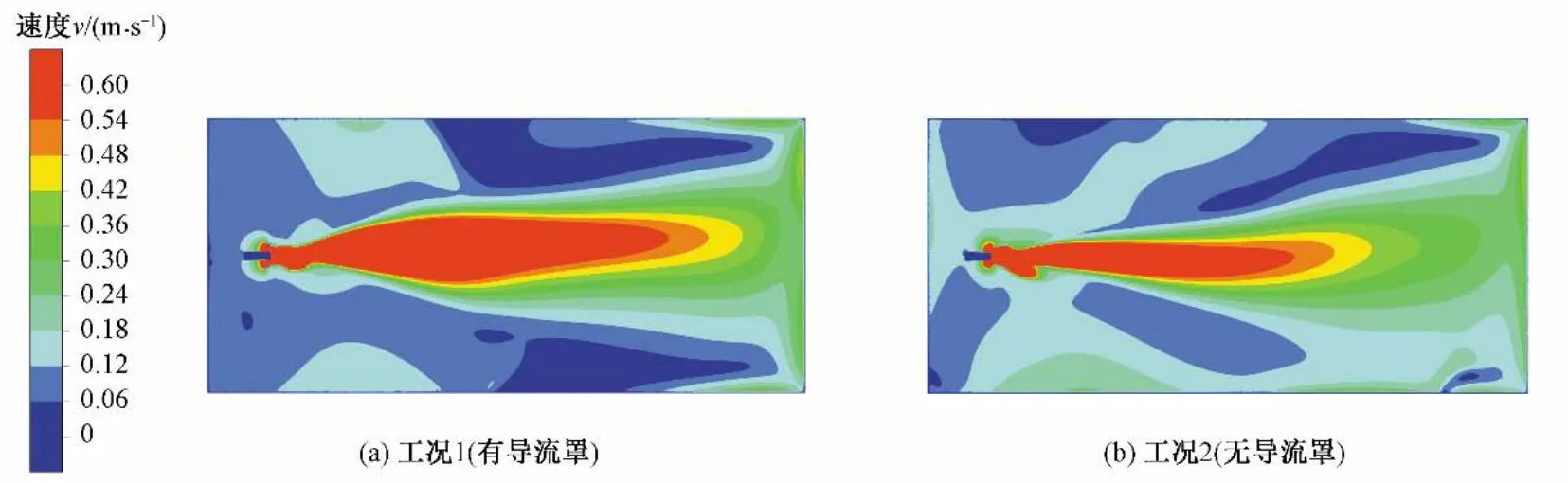
图10 潜水推流器在转轮安装断面处速度云图Fig.10 Velocity cloud of the submersible thruster at the rotor mounting section
从图10速度云图分别可以看出,有无安装导流罩潜水推流器在0.3 m/s 下为13.1 和12.5 m,0.4 m/s 下有效推进距离为12.2和9.5 m,在0.6 m/s 下为8.5 和6.5 m。由此可见:安装导流罩可以增加高速推流器的推进距离,有导流罩的推流器(工况1)的有效推进距离比没有导流罩的推流器(工况2)的有效推进距离在0.3、0.4、0.6 m/s条件下分别增加了4.8%、28.4%、30.8%。
5 结论
文章采用试验和CFD 相结合的方法,通过试验获得潜水推流器下水运行过程中的试验推力、试验功率和试验推功比,通过CFD 分析方法获得理论模拟推力、理论模拟功率、理论模拟推功比、速度云图和有效推进距离。主要结论如下:
(1)通过开展试验和数值模拟得到了推力、功率及推功比,数值模拟和试验值相比误差小于5%,安装导流罩的潜水推流器的推力、功率以及推功比比未安装导流罩的潜水推流器分别要减小24.3%、22.4%、2.4%。
(2)安装导流罩可以增加推流器的有效推进距离,安装导流罩与未安装导流罩相比在0.3、0.4、0.6 m/s条件下有效推进距离分别增加了4.8%、28.4%、30.8%。