改进COOT算法求解多目标柔性车间调度问题
2023-11-27凌方平吉卫喜
凌方平,吉卫喜
江南大学 机械工程学院,江苏 无锡214122
柔性作业车间调度问题(flexible jobshop scheduling problem,FJSP)隶属于NP-Hard 问题,是Bruker 等[1]在1990年建立的,它是调度问题中新的分支。此类问题旨在充分利用有限的生产资料,协调生产部门间的需求,同时最大化生产获益。现阶段离散制造企业中,车间对加工工件的机器和人员配置是灵活的、多样的,因此FJSP 相较流水车间调度和普通作业车间调度,能更好地契合该生产实况,探讨和解决FJSP具有重要意义。
元启发式算法通过制衡全域搜索与区域搜索能力,能出色地寻优求解NP-Hard 问题。单目标FJSP 的优化目标单一,大多根据完工时间比较不同调度方案的优劣。诸多元启发式算法一定程度上能在全局进行搜索,在短时间内得到此类问题的最优解或最优解的近似解。连裕翔等[2]以最大完工时间为优化指标,为Jaya算法设计了迭代候选解集和新的邻域结构,最后用基准实例集证明了改进Jaya算法的有效性。
然而在现实的生产作业中,车间常会有其他考虑的方向,因此多目标FJSP 应运而生。求解多目标FJSP 常见的手段有两种:一种对各个目标赋予权重后加权计算,再用类似处理单目标FJSP 的方法进行解决。陈浩杰等[3]针对不同的资源受限情况,分类设计了归一化方式,并改进了遗传规划算法来解决问题;Zhang等[4]在粒子群算法的基础上,结合禁忌搜索算法来接近最优解,从而化解了大规模多目标FJSP。还有一种是使用Pareto思想的优化策略。由Knowles等[5]构建的多目标问题演化策略PAES、由Deb等[6]提出的把遗传算法与非支配排序结合的NSGA-II 算法,常被学者进行改进,并用来求解多目标FJSP。例如肖世昌等[7]提出了多目标混合分布估计算法,得到了兼顾调度性能和鲁棒性的Pareto 解集;鞠录岩等[8]考虑了运输时间的影响,使用改进的NSGA算法求解多目标FJSP。
COOT 算法是一种根据鸟类群体行为提出的元启发式算法,由Naruei 等[9]在2021 年提出,初衷是解决单目标问题,具有收敛速度快、参数设置简单、个体更新方式多样的优点。该算法虽然刚出现不久,但目前已被用于求解各种优化问题[10-11]。然而,COOT 算法应用在生产调度领域的文献极少,且算法性能仍有改进的空间。因此,本文将COOT 算法扩展应用于FJSP,并对COOT算法进行了一系列的改进。
针对以上不足,本文构建了以最小化最大完工时间、机器总负荷、耗能为优化目的,且考虑了机器与工人柔性因素的车间调度模型。接着设计编解码方式,确保个体位置信息与更新方式均为连续值的COOT 算法能被离散型的调度问题使用。然后通过引入存档集和Pareto 解的概念,使得原先只能解决单目标问题的COOT算法,拥有了解决多目标问题的能力。还改进了算法中特定个体的更新方式以加快收敛速度,并更改其邻域搜索方式,同时配合SA的思想,避免算法陷入局部最优。最后通过算例进行测试,以证明MOCOOT-SA的有效性。
本文的主要贡献是:一是改进了COOT 算法,使之能解决多目标问题。二是在FJSP的多目标权重难以确定的情况下,提供了解决思路和方案。
1 问题描述与模型建立
本文的多目标柔性车间调度问题描述如下:工厂现有l个工人L={L1,L2,…,Ll},要在m个机器M={M1,M2,…,Mm} 上制作n个工件N={N1,N2,…,Nn},工件的工艺路线是固定的、已知的,工件Ni有j道工序{Oi1,Oi2,…,Oij},Mij⊆M和Lij⊆L分别是能加工工序Oij的机器和人,同一工序选择了不同的机器或者人,导致它的加工时间可能不同。调度的目的是把每个工件的工序合理分配给工人,并安排工人在机器上加工,让优化目标尽可能达到最优。
建立问题模型时,根据实际的加工情况,提出若干约束条件:
式(1)~(8)中,m为总的机器数,l为总的工人数,gi为工件i的总工序数,p为机器号,q为工人号,Sij为工序Oij的开始时间,Eij为工序Oij的结束时间,BTp为机器p的开机时间,CTp为机器p的关机时间,tijpq为工序Oij在机器p上被工人q加工所需的时间,Z为足够大的正数。αijpq、βijrsp、γijrsq为0~1决策变量:如果工序Oij在机器p上被工人q加工,则αijpq=1,否则αijpq=0;如果工序Oij与Ors都在机器p上加工,且Oij先于Ors,则βijrsp=1,否则βijrsp=0;如果工序Oij与Ors都被工人q加工,且Oij先于Ors,则γijrsq=1,否则γijrsq=0。
式(1)表示每个工序的加工过程不会中断,工序的完工时间等于开工时间加上加工所需时间;式(2)表示每个工序仅加工一次,且只能选一个工人和机器;式(3)表示只有在上道工序完成后,该工件才能开始下道工序的操作;式(4)表示所有机器在0时刻都已开动,且可以被使用;式(5)表示每个机器在任何时间点只能加工一个工序;式(6)表示每个工人在任何时间点只能加工一个工序;式(7)表示所有工序的开工时间、完工时间和加工时长都是非负数;式(8)表示任何一个机器,只有在完成了所有分配给它的任务后,才能关机。
调度的优化目标有三项:最大完工时间f1,机器总负荷f2,总耗能f3。以此建立数学模型,目标函数为:
式(9)~(11)中,n为工件的总数,Di为工件i的完工时间,PYp为机器p的负载功率,PNp为机器p的空载功率。
2 编码与解码
2.1 编码
标准COOT算法的初衷是解决连续性问题,而调度问题中机器、工序、人员的选择都是离散的,因此直接用标准COOT算法来解决FJSP是无法实现的。编码的方式在一定程度上影响算法的性能,本文选择了基于工序的编码方式。算法中的种群个体由位置向量表示,向量的长度为,其中每个值的取值范围为0至1间的随机数,它与工序的对应关系如图1 所示。例子中共有3工件7工序,先将位置向量与有顺序的工序编码进行映射,再将原向量升序排序,工序编码随之移动,得到的[2 2 3 1 3 2 1]中,以工件2 为例,出现第几次2 就代表是工件2的第几道工序。如此,就得到一个有效的工件序列,记作List。
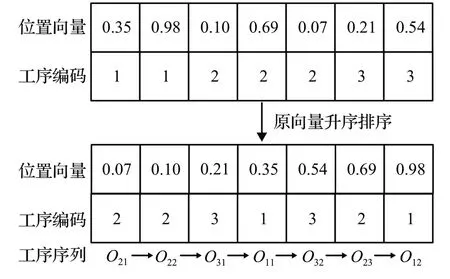
图1 编码样例图Fig.1 Coding sample map
这种编码方式简洁明了,还确保了所有个体的位置信息都能转化成合法的调度方案。
2.2 解码
本文考虑了机器与工人的约束,采用了插入式贪婪的解码方式。效仿文献[12]提出的中继卫星调度任务构成的时间窗口概念,把FJSP 中每个机器或者工人空闲的时间段称为时间窗口集。时间窗口集是若干个不重叠的时间窗口[ ]t1,t2的并集,并给出如下定义:时间窗口集a与时间窗口集b相重合的时间段c,记作c=a∩b。
解码方式如下:
(1)以集合Rn记录各工件最后一道已完成工序的完工时间,Rm、Rl分别记录各机器、工人的时间窗口集,从List中选择加工优先度最高的工序Oij。
(2)获取可加工Oij的设备集合Mij,设其中有x1个机器;获取可加工Oij的工人集合Lij,设其中有x2个工人,则对于两者的选择共有x1x2种组合。对于每种组合,可知工件在该组合的情况下所需的加工时长t。从Rm中取对应机器的时间窗口集Um,从Rl中取对应工人的时间窗口集Ul,求得交集U=Um∩Ul,再从Rn里得到此工件的上道工序完成时间Ei(j-1)(若Oij是工件i的头道工序,该值取0)。从U中按时间先后顺序,找到其中第一个符合Ei(j-1)时刻且长度不小于t的时间窗口。一旦找到这种时间窗口[t1,t2],即可得知在此种机器、工人组合下,Oij的加工时间为[t1,t2+t]。同理,分别计算其他组合情况所对应的加工时间。
(3)以最早完工的原则,取得该工序所有组合情况中的min(t2+t),它对应的机器与工人就是此工序最后确定使用的。
(4)更新Rn、Rm、Rl,从List中选择下道工序,循环步骤(1)~(3),直至遍历全部工序后,按式(9)~(11)计算f1至f3。
3 基于MOCOOT-SA算法的模型求解
3.1 标准单目标COOT算法
COOT算法的原理为:用搜索空间中分布的散点模拟自然界中白骨顶鸟个体,将搜索过程模拟成白骨顶鸟在水面上集体运动的过程,把问题的目标函数模拟成白骨顶鸟所在位置的优劣。
该算法主体思想如下:
(1)初始化种群,随机选取其中NL个成为leader,剩余的NC个为coot,比例常取1∶10,把所有coot 平均分配给每个leader 形成一组,共NL组,并根据适应值确定全局最优。
(2)每个coot 有三种运动方式,按其中一种更新位置。
(3)每个coot 更新后的适应值优于所在组的leader时,交换两者。
(4)每个leader 向全局最优的邻域移动。
(5)每个leader 更新后的适应值优于全局最优时,交换两者。
(6)重复(2)至(5)直到满足结束条件。
该算法主要仿生了如下的移动方式:
(1)coot 根据所在组的leader 调整位置
式中:CootPos(i)为某个coot 的位置;LeaderPos(k)为该coot 服从的leader 位置;R和R1是随机值。
(2)coot 跟随前一个coot 链条移动
(3)coot 随意移动
式中:A=1-L/Iter,L为当前迭代次数,Iter为最大迭代次数;R2是随机值;Q是全局随机一点。
(4)leader 向全局最优的邻域移动
式中:LeaderPos(i)为某个leader 的位置;gBest是全局最优位置;B=2-L/Iter;R和R3是随机值。
3.2 结合SA的多目标COOT算法
3.2.1 存档集的引入
在单目标COOT算法中,易通过比较得到全局最优值。然而在多目标问题中,除了一个解的各目标值均劣于另一个解的情况外,不能严格地区分两个解的优劣。为此,在多目标COOT 算法中,引入存档集的概念,当leader 要向全局最优的邻域移动时,改为向存档集中随机一个邻域移动。设存档集的大小为C,存档集的建立步骤如下:
(1)将上一代的存档集与当代种群合并,筛选出目标函数值不重复的个体(若为初代,则改为对初代种群执行此操作)。对合并的种群进行非支配比较,筛选出Pareto最优解集。
(2)若Pareto 解集中解的个数不大于C,则该解集成为新的存档集。
若个数大于C,则先令解集中所有个体的初始拥挤度I为0。再把这些解按每个优化目标函数值的大小排序。特别的,边界上解的I为无穷大,然后按下面式子计算解集中其余每个解的拥挤度I:
式中:x是要优化目标的个数;分别为第i个解的前一个与后一个解的第d个目标函数值;为第i个解在第d个目标函数的最大值与最小值。I越大,说明该解附近的解就越少,与其他解的相似程度越低,对种群的多样性能作出更大的贡献。
最后按拥挤度排序,依次从解集中删除拥挤度最小的解,直至解集的个数为C,令此解集成为新的存档集。
3.2.2 边界变异
在COOT算法迭代寻优的过程中,种群中个体的位置随着变异操作,会有越出搜索域的可能,这样的个体称为无效个体。原COOT算法中的处理方法如下:若个体的某个维度在变异后超过了该维度所定义的上(下)限,则令该维度的值修正为上(下)限。这种做法会让个体在搜索域的边界上聚集,个体的随机性变低,算法的局部搜索能力下降,为此采用如下式子处理个体在某个维度上的越界:
式中:ub和lb为搜索区域在维度d的上限和下限;m通常取0.01至0.1;xd为越界修正后在维度d的值。
3.2.3 自适应选择系数
COOT 算法中,已知当前迭代次数为i,选择概率p1、p2均为固定值0.5,coot 个体选择的更新方式及其概率如图2所示。
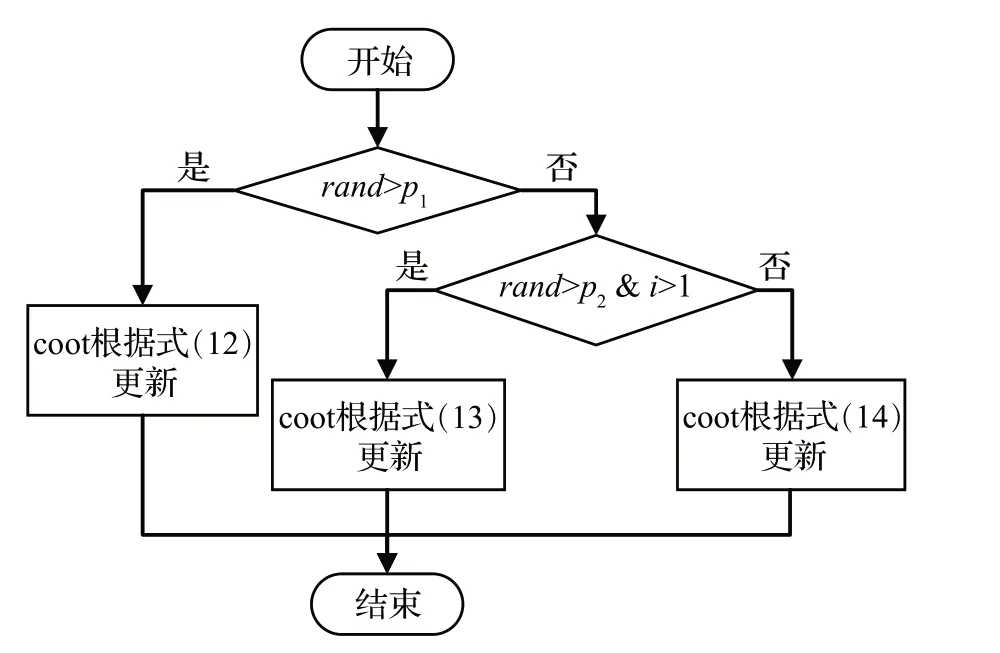
图2 coot个体选择的更新方式及概率Fig.2 Update method and probability of coot selection
基于群体的元启发式算法的搜索权重往往是动态变化的[13-14],以利于算法跳出局部,尤其在算法运行的后期很重要。因此,本文对p2进行了自适应调整修改。为此,定义了两个参数:聚集度因子ω和进化速率因子φ。
聚集度因子ω定义为:
式中:d为优化目标的个数;分别为第i次迭代中,存档集的所有解与种群的所有解在某个优化目标上适应度的均值;ω体现了当前种群所有个体的聚集程度,0<ω≤1。
进化速率因子φ定义为:
式中:d为优化目标的个数;分别为第i次与第i-1 次迭代中,存档集的所有解在某个优化目标上适应度的均值;φ体现了种群的进化速率,0<φ≤1。
当ω变大时,体现了种群的聚集程度变高,有进入局部最优的风险,此时要使p2增大,提升coot 个体移动的随机性,扩大其搜索区域,以强化算法的全局搜索能力;当φ变大时,体现了种群的进化速度逐渐变小,此时需要减小p2,使得coot 个体在更小的区域内搜索,进而充分搜索局部找到最优解。
结合上述讨论,将固定值p2更改为自适应选择系数,应为ω与φ的函数,表示为:
式中:当ω取0.10~0.25,φ取0.40~0.60 时,算法的性能较好。
3.2.4 改进leader的更新方式
在COOT算法中,种群中两类个体的更新方式有较大差异。coot 的更新方式有三种,且个数相较leader 众多,有较强的全局搜索能力。
对比之下,leader 的更新方式有三个缺点:(1)只有式(15)一种更新方式,局部搜索能力一般,且更新后的位置如果劣于原leader,则不会被接受,进一步降低了搜索能力,使得陷入局部最优的可能性增大。(2)leader是通过向已知的全局最优移动,全局最优再向真实的Pareto前沿移动的方式来更新的,一定程度上降低了算法的收敛速度,如图3 所示。(3)COOT 算法适用于解决连续的实数问题,式(15)是在笛卡尔空间中对leader 的邻域进行搜索,解码后映射到离散的调度方案时,不能保证解码后是有意义的邻域。因此,本文改进了leader的更新方式。
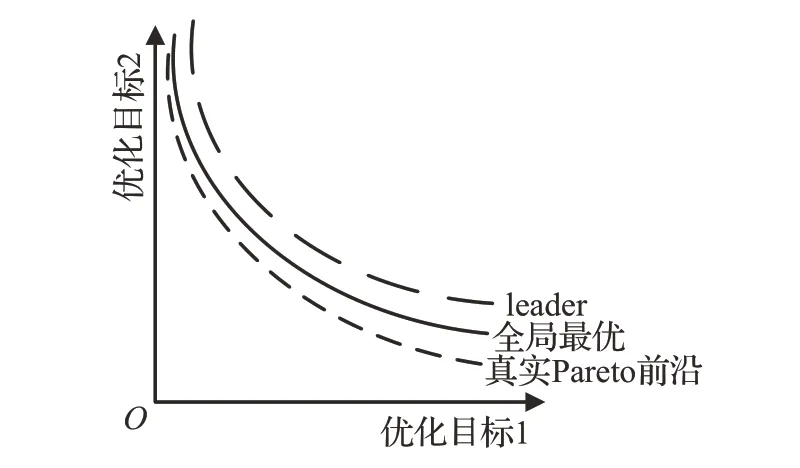
图3 leader更新示意图Fig.3 Leader update diagram
首先,每个leader 更新时仍按式(15)搜索gBest 的邻域生成一个临时解tem,若tem 支配leader,则tem 替代对应的leader,否则从存档集中随机选取一个取代该leader。这个操作虽然加快了收敛速度,且保证了新的leader 是已知解里面的最优解之一,但增加了陷入局部最优的风险。作为代偿,引入了SA 对leader 进行邻域搜索,并对leader 的邻域定义进行调整。leader 邻域的新定义是调换向量leader 上任意两个位置上的值,对应到工序序列的变换就是调整任意两个工序的位置,如图4所示。对新的工序序列进行插入式贪婪解码,就得到了新的调度方案。
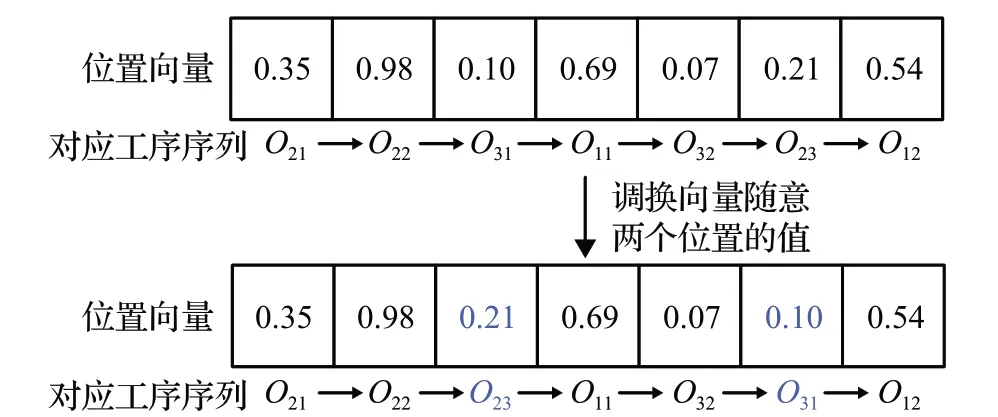
图4 个体leader的某个邻域图Fig.4 Neighborhood graph of leader
SA 算法具有局部搜索能力强的优点[15],在初始温度足够高、结束温度足够低、退火速率足够慢的情况下,理论上能获取全局最优解,缺点是迭代次数过多导致的算法运行时间长,因此不能直接使用。
在使用SA 对leader 邻域搜索时,也会出现两个解互不支配的现象,进而引发难以比较优劣的问题。常见的方法是赋予权重后进行比较,或者在出现互不支配的情况时,随机选取一个[16]。本文参考SUMAN[17]对SA算法提出的Pareto支配适应度值的改进接受准则,按如下计算的概率接受新解:
式中:T为当前退火温度;Sold、Snew分别是旧解和新解的适应度值,适应度值等于档案集中支配该解的个数。
在式(21)中,分子的大小与档案集的规模有关,因此初始温度不宜过高,取档案集大小的1/2 左右既能避免陷入局部最优,又能一定程度上缩减迭代次数,减少SA算法运行时间过长带来的弊病。
3.2.5 算法流程
结合上述改进,构建MOCOOT-SA算法。其中的参数设置:种群规模N(其中leader 类个体有NL个,coot类个体有NC个),初始选择系数p1、,最大迭代次数Iter,档案集最大容量Nr,模拟退火初温Ts,终温Te,降温系数δ,马尔可夫链长度lm。MOCOOT-SA 算法的流程图如图5所示。
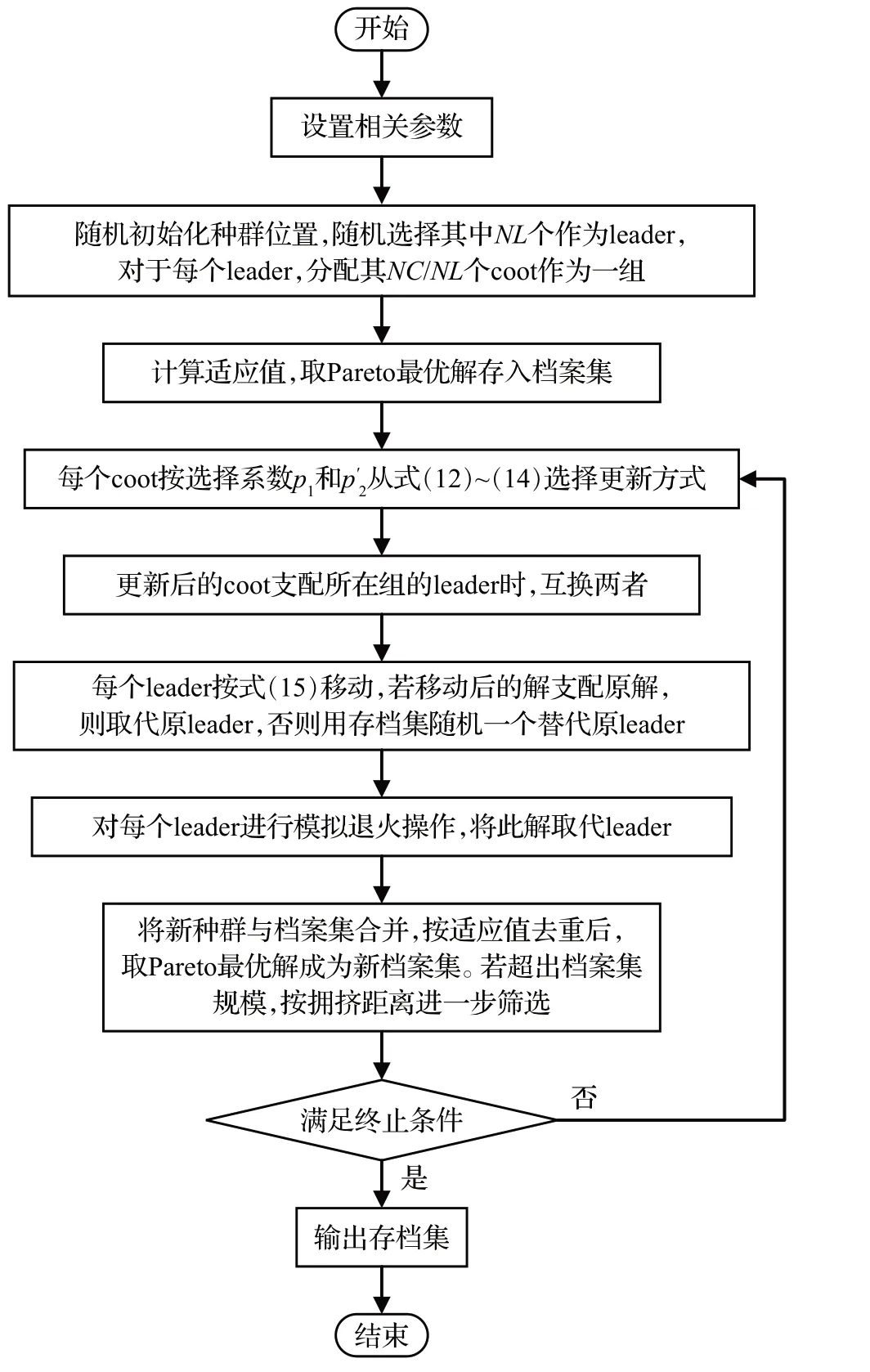
图5 MOCOOT-SA算法流程图Fig.5 MOCOOT-SA algorithm flow chart
4 实验结果与分析
为了验证MOCOOT-SA算法的有效性与可行性,本文在MK01基准算例(10工件6机器)的基础上,结合实际,给出了机器与工人的信息,数据如表1~表2 所示。表1 是5 个工人与6 个机器的关系,符号○代表当前工人能操作该机器。表2 是6 个机器的耗电情况,机器在负载与空载的情况下耗能不同。

表1 各工人能加工的机器信息Table 1 Machine information that each worker can process
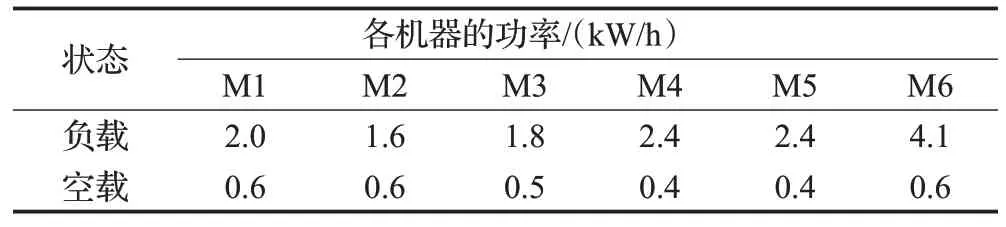
表2 机器的耗能信息Table 2 Machine energy consumption information
对MOCOOT-SA 算法运行上述例子,参数设置如下:种群规模N=100(其中leader 类个体有10个,coot类个体有90 个),选择系数p1=0.5,自适应选择系数0.5+0.1h-0.4g,档案集最大容量Nr=30,最大迭代次数Iter=150,模拟退火初温Ts=15,终温Te=0.3,降温系数δ=0.85,马尔可夫链长度lm=100。
多目标粒子群算法(MOPSO)、NSGA-Ⅱ算法分别是在成熟的粒子群算法和遗传算法上进一步改进得到的,两者突出的寻优能力使它们常被应用到调度问题中[8,14]。为了比较新算法的性能公平起见,尽量使得三种算法的种群个数和迭代次数等保持一致。MOPSO的有关参数如下:最大迭代次数为200,种群规模为100,档案库大小为50,初始惯性权重系数为0.9,惯性权重衰减为0.99,个体学习因子为1.7,全局学习因子为1.8;NSGA-Ⅱ的有关参数如下:最大迭代次数为200,种群规模为100,交叉概率为0.9,变异概率为0.03。实验结果如表3所示。
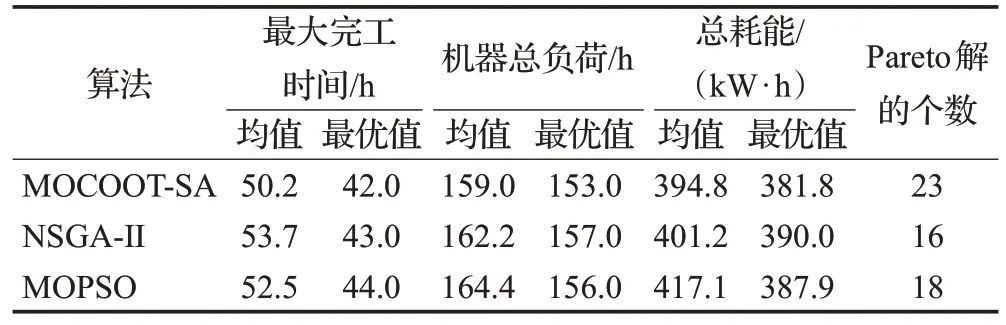
表3 三种算法结果Table 3 Three algorithm results
由表3的信息得知,通过MOCOOT-SA得到的Pareto解总体上不劣于其他两个算法:与NSGA-Ⅱ比较Pareto解的均值,最大完工时间优化了3.5 个单位,优化比为0.065,机器总负荷优化了3.2个单位,优化比为0.020,总耗能优化了6.4个单位,优化比为0.016;与MOPSO比较Pareto解的均值,最大完工时间优化了2.3个单位,优化比为0.044,机器总负荷优化了5.4个单位,优化比为0.033,总耗能优化了22.3个单位,优化比为0.057。同理,比较MOCOOT-SA与NSGA-Ⅱ算法在各目标上的最优值,均有提升,优化比为0.023、0.025、0.021;比较MOCOOT-SA与NSGA-Ⅱ算法在各目标上的最优值,优化比为0.045、0.019、0.016。同时,在同等种群规模的前提下,通过MOCOOT-SA 得到的Pareto 解的数量要比另外两个算法多,能给予工厂更丰富的选择,可见MOCOOT-SA 算法有解决FJSP问题的能力。
用MOCOOT-SA 算法仿真后得到的存档集的解共有23组,如表4所示。决策者可根据表4中的解和各自的偏好,选取一个作为最终的调度方案。
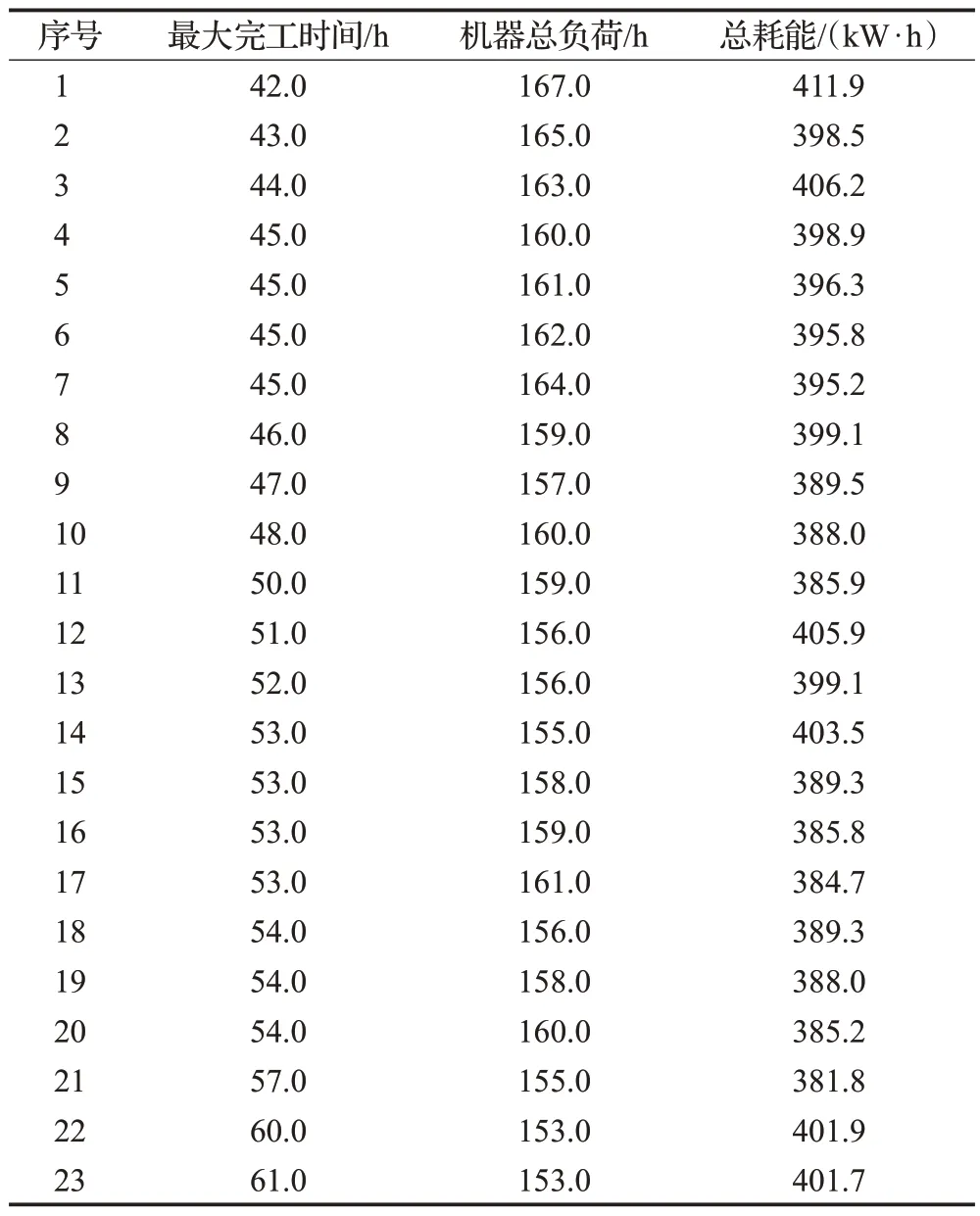
表4 最后一代时存档集的解Table 4 Solution for archive set in last generation
MOCOOT-SA算法求解该问题迭代至最后一代时,种群的解与存档集的解的分布如图6所示,证明了使用SA对leader 进行邻域搜索的有效性。
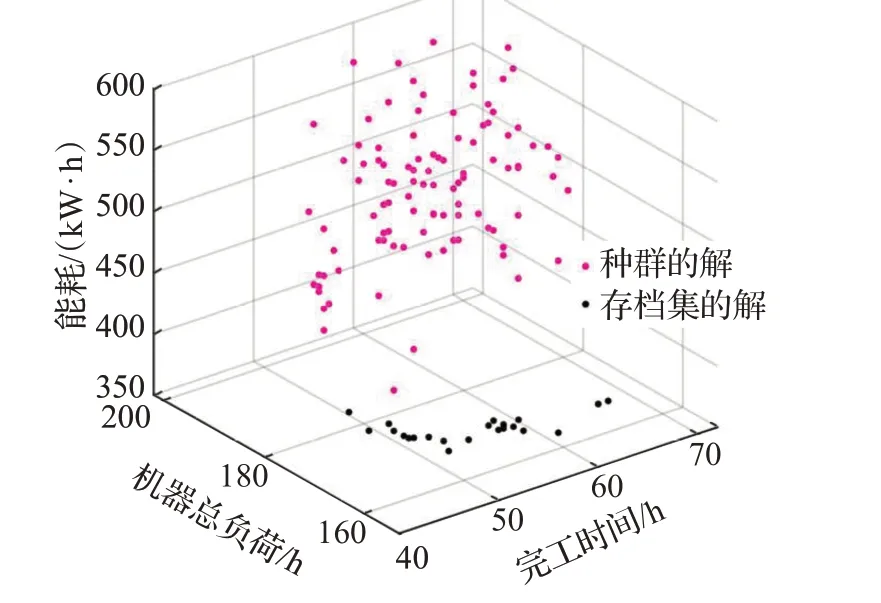
图6 种群与存档集的个体分布图Fig.6 Individual distribution graph of populations and archive sets
存档集中各目标适应值的迭代过程如图7所示,体现了存档集中所有解的最值与均值随迭代次数变化的情况。
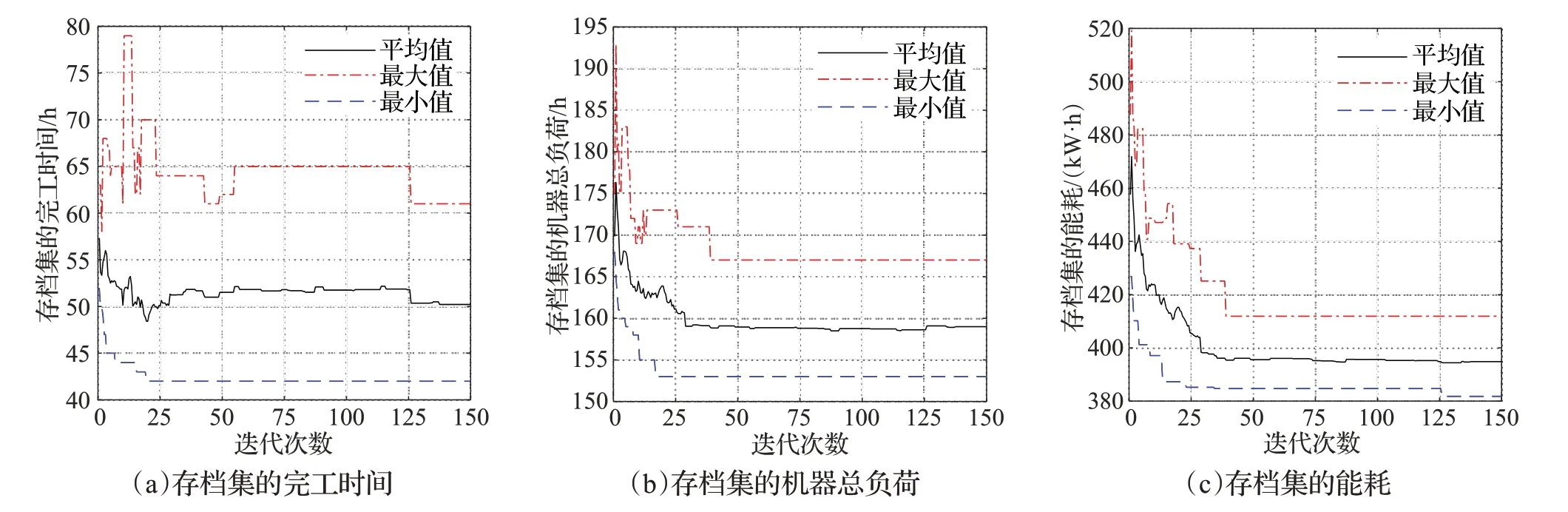
图7 存档集的解的变化图Fig.7 Variation graph of solution for archive set
图8 是表4 中第一个解的调度方案。以M6 的第一个工序上注明的10/1 5为例,表示工件10的第1道工序由工人5在第6个机器加工。按这种方式可依次获得所有工序的加工安排。
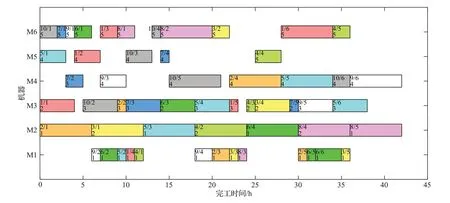
图8 调度甘特图Fig.8 Scheduling Gantt chart
5 结束语
本文考虑了机器与工人的约束,以最小化最大完工时间、机器总负荷、能耗三个优化目标,对多目标柔性调度车间问题建立了数学模型,并使用了简洁的编码方式,在解码过程中采用了时间窗口的概念,使得离散问题能在连续性算法上适用。同时,对单目标COOT算法进行了多方面的改进,以适应求解多目标问题和FJSP问题,得到了性能更好的MOCOOT-SA 算法。最后,通过算例测试,对MOCOOT-SA与NSGA-Ⅱ算法、MOPSO算法的方案进行比较,其各目标上的平均值的优化比为0.013~0.047,各目标上的最优值的优化比为0.016~0.045,证明了新算法的有效性。
在下阶段的研究进程中,可以考虑更多的约束条件,例如工装与刀具,并探索MOCOOT-SA 解决扰动环境下车间调度问题的能力。