旋转导向近钻头方位伽马测量仪研制与应用
2023-11-23孙龙飞王晓鹏张启龙谢涛林海董平华尚捷
孙龙飞,王晓鹏,张启龙,谢涛,林海,董平华,尚捷
1.中海石油(中国)有限公司天津分公司(天津 300459)
2.海洋石油高效开发国家重点实验室(天津 300459)
3.中海油田服务股份有限公司(河北 廊坊 065201)
随钻方位伽马测井仪是石油勘探开发必不可少的仪器,该仪器通过测量地层自然放射性的差异,确定地层岩性及泥质含量,以评价油气藏可能性及储量[1-3]。以斯伦贝谢、哈里伯顿为代表的各大油服公司相继推出随钻方位伽马仪器,可准确识别地层信息,在现场得到广泛应用。近年来随着我国部分海上油田进入开发中后期,薄油层、断块油层地开发越来越多,传统的随钻方位伽马测井仪由于伽马测点距离钻头较远,不利于钻井轨迹的及时调整,导致钻出储层,难以实现高效开发。针对此问题,介绍了旋转导向近钻头方位伽马,该仪器集成安装在中海油服研发的旋转导向钻井系统加长柔性短节内部,是旋转导向钻井系统的一部分,可实现内存8 扇区和实时上传4 扇区的伽马测量,且伽马测点距离钻头只有4.069 m,测量精度±5API@100API(钻进速度ROP≤30 m/h),并且与旋转导向钻井系统高度集成,借助旋转导向的轨迹控制能力实现及时回调,确保轨迹在储层穿行,提高钻遇率。
1 旋转导向近钻头方位伽马系统结构
旋转导向近钻头方位伽马测量系统集成了自然伽马测井技术和方位扇区测量技术。由伽马测量模块、方位扇区测量模块和双伽马探测器组成,如图1所示。伽马测量模块与系统总线挂接,实现取电和通讯,同时从系统总线读取井斜INC 和方位AZI 值,并采用双伽马探测器实现伽马射线的采集处理和计数。方位扇区测量模块采用三轴磁通门传感器实现方位测量,其原理是通过测量磁场强度在x轴、y轴、z轴的分量Hx、Hy、Hz,再利用其三角函数关系得到方位角。同时,通过向伽马测量模块发送扇区整周期标记信号S0 和分扇区标记信号S1,实现对应扇区的伽马强度测量,以反映地层岩性变化信息。

图1 系统结构图
2 方位扇区测量模块
2.1 方位扇区测量原理
旋转导向近钻头方位伽马测量仪可实现8扇区和4 扇区两种测量模式。8 扇区是环井周8 等分,每个扇区45°,扇区编号顺时针分为0 扇区至7 扇区,并将对应扇区的伽马计数记录到内存中。4 扇区是环井周4 等分,每个扇区90°,分为上、下、左、右扇区,并通过泥浆脉冲信号实时上传对应扇区的伽马计数,地面工程师可通过4 个扇区伽马强度变化的先后顺序,判断进出油气层的方向[4],从而及时调整钻井轨迹。
方位扇区角ϕ是仪器横截面上伽马探测器环井周扫过的扇区角[5],如图2 所示,它由两部分组成:一是磁工具面角γ;二是地磁北在横截面上的投影与该截面高边的夹角ω。利用安装在钻铤骨架上的正交磁通门传感器可测得地磁矢量的两个分量Hx和Hy,则有:

图2 扇区角几何关系示意图
已知ω只与磁倾角θ、井斜角α、方位角β有关,且磁倾角只与纬度位置有关,井斜角和方位角可通过随钻测量仪(MWD)测量得到,则有:
在旋转钻进工况下,方位扇区角ϕ的计算公式为:
因此只需通过双轴磁通门传感器快速测量Hx和Hy,即可实现方位扇区角的准确实时测量。
2.2 方位扇区测量电路设计
为满足测量需求,旋转导向方位扇区测量模块由MCU 主控电路、磁通门测量采集处理电路[6-7]、温度测量电路、数据存储电路、通讯电路、基准电压电路构成。
MCU 主控电路是方位扇区测量模块的控制核心,采用ADUC845 处理器,主要功能是实现方位扇区角解算[8]、A/D 转换、数据存储和通讯及时间同步。磁通门测量采集处理电路将地磁场3 个轴向上的分量转化为对应的电压信号Hx、Hy、Hz,并进行激励放大后输入到主控电路完成采集处理,如图3所示。主控电路根据温度测量电路输入的电压信号,进行温度补偿计算,得到扇区角。数据存储电路由电源转换芯片、电平转换芯片和FLASH 存储器芯片构成,实现测量数据和加载参数的存储。基准电压采用ADR421 芯片提供+2.5 V 和+1.25 V 的参考电压。通讯电路采用SN65HVD11QD 芯片与上位机实现差分异步串口通讯,实现程序和参数下载。
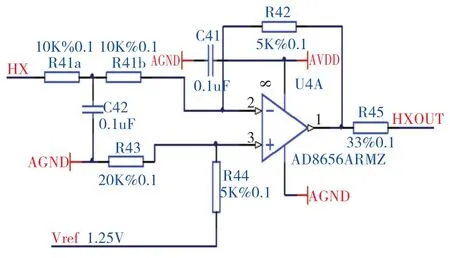
图3 轴磁通门输出信号调理电路
3 伽马测量模块设计
根据井下作业工况和测量要求,选用型号为NGT-075 的伽马探测器,外径为19.05 mm(0.75″)。该伽马探测器将NaI 晶体、光电倍增管、高压模块、前置放大电路集成于一体,以节省安装空间。伽马测量模块由主控电路、电源电路、系统总线接口电路、RTC 时钟电路、数据存储电路构成,如图4所示。主控电路完成双伽马探测器伽马射线采集计数、扇区中断信号处理、伽马强度计算及系统总线指令收发等功能。 电源电路实现系统总线取电,并转化为3.3 V、±5 V、24 V输出,为其他芯片、磁通门传感器和伽马探测器供电。RTC时钟电路完成同步时间,数据存储电路实现方位伽马测量数据的存储。伽马测量模块的固件程序包含5个业务处理单元和10个外设接口处理单元,如图5所示,可实现方位伽马的测量、存储和传输功能。
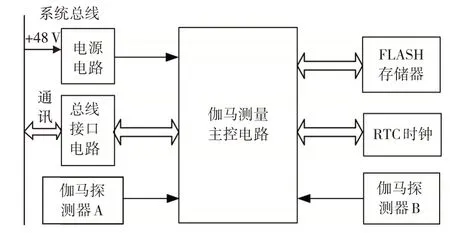
图4 伽马测量系统电路结构
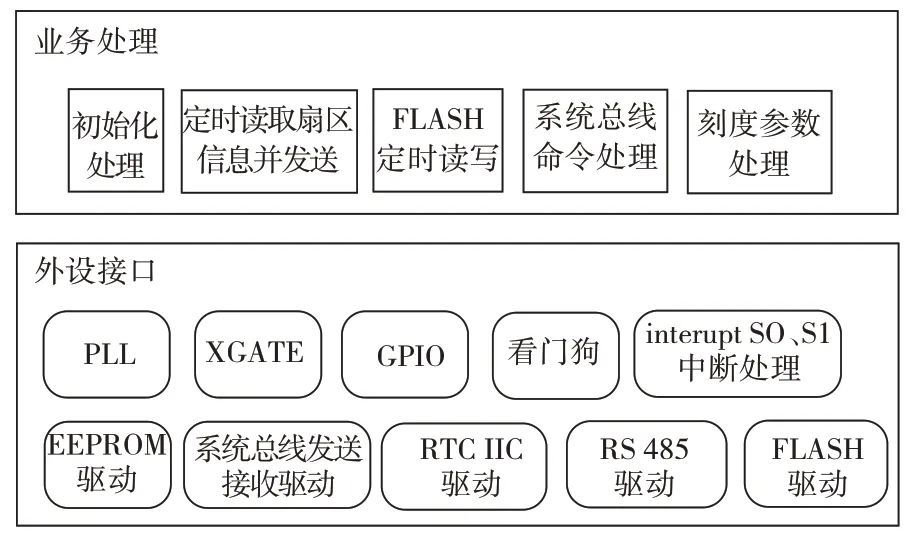
图5 伽马测量模块程序结构
4 方位伽马刻度方法与软件开发
由于不同伽马探测器的计数效率存在差异,以及安装伽马探测器的机械结构及材料对伽马射线的屏蔽程度不同,所以需要在仪器出厂前进行刻度标定[9]。针对不同井眼尺寸的仪器,选用对应的刻度井进行刻度标定[10-11]。对于675 型旋转导向近钻头方位伽马仪器选择井眼直径216 mm 的刻度井,低刻值伽马强度为11.8 API,高刻值伽马强度为264.5 API,刻度井的结构如图6 所示。刻度过程分低刻和高刻两步进行:低刻时,下入低刻井;高刻时,下入高刻井,且保证伽马测点距离井口1.25 m。

图6 刻度井结构图
为了提高刻度标定的效率和精度,以Visual Studio 2012为平台开发了刻度标定专用软件,如图7所示。该软件具有刻度参数自动拟合、刻度数据自动保存及刻度时间写入等功能。通过采集100组实测数据,利用最小二乘法拟合得到伽马强度Gr与单位时间伽马计数值cps的线性关系,即:Gr = K × cps + B,其中K为比例系数,B为截距,并将K和B加载到仪器当中,以计算伽马强度。
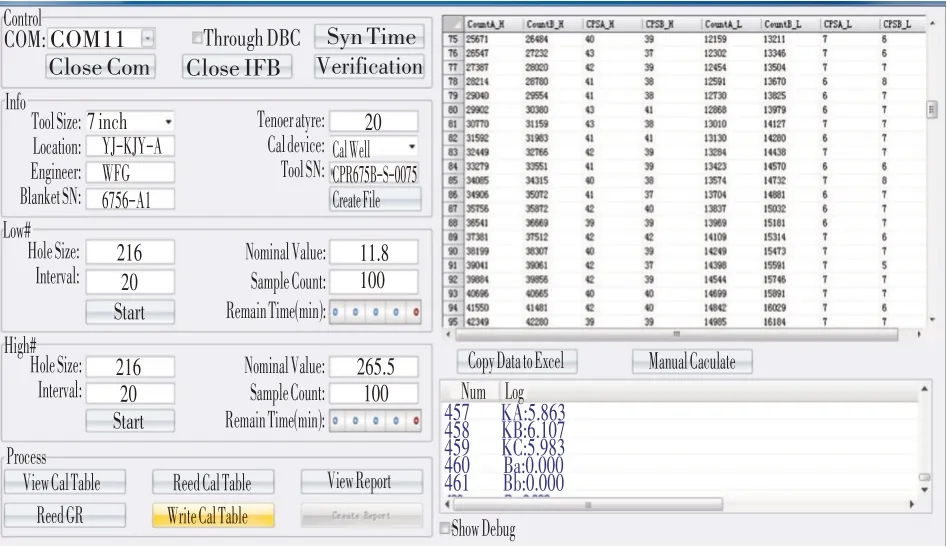
图7 刻度标定软件
5 现场应用
旋转导向近钻头方位伽马在海上油田顺利完成作业,总进尺1 480 m,循环时间48.8 h,验证了测量电路及机械结构稳定可靠,上、下、左、右4扇区伽马测量数值稳定,方位信号输出正常,且能正确反映地层岩性变化信息,与同一趟钻常规电阻率方位伽马仪器测量数据相吻合。伽马测量曲线如图8所示,纵坐标为井深,横坐标分别为旋转导向近钻头方位伽马PGRUm(上伽马值)、PGRDm(下伽马值)、电阻率方位伽马PGRUm_ACPR(上伽马值)、PGRDm_ACPR(下伽马值)。从图8 可判断出在井深2 037 m位置,下伽马值先增大,上伽马值后增大,说明仪器从储层下部穿出,进入泥岩,为现场工程师及时调整轨迹指明了方向。
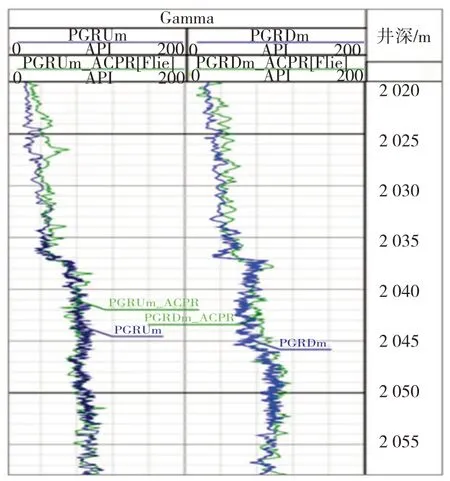
图8 旋转导向方位伽马测井曲线
现场应用表明,该仪器运行正常,测量电路及机械结构稳定可靠,能正确反映地层岩性变化信息;并为现场工程师及时决策提供依据。
6 结论
旋转导向近钻头方位伽马测量仪作为中海油服自主研发的旋转导向钻井系统的组成部分,使旋转导向钻井系统具备了近钻头地层识别能力,为井下闭环系统和地面决策人员提供了更为精准、及时的轨迹调整依据,可有效防止轨迹出层,保证钻井轨迹始终在目标油气层中钻进。其成果如下:
1)距离钻头更近,测点距离钻头只有4.069 m,可及时判断储层情况,并第一时间调整轨迹。
2)具备扇区方位测量功能,设计温度补偿电路和磁通门信号调理电路消除温度波动误差,提升扇区方位测量精度。
3)优化扇区中断信号处理机制,提升测量采集速度,防止丢失扇区脉冲信号,实现环井周实时4扇区、内存8扇区的伽马测量。
4)开发方位伽马刻度软件,实现伽马刻度“一键化”,提升了工作效率和刻度精度。
随着油气勘探开发的深入,深井、超深井、大位移井越来越多,需要进一步提高方位伽马测量仪对高温、高压及强烈震动工况的适应能力,从制造工艺、电路设计优化和处理算法优化方面进行改进,以满足应用需求。