装包卸包型马铃薯联合收获机设计与试验
2023-11-23魏忠彩苏国粱李学强金诚谦
魏忠彩 韩 梦 苏国粱 张 浩 李学强 金诚谦
(1.农业农村部南京农业机械化研究所, 南京 210014; 2.山东理工大学农业工程与食品科学学院, 淄博 255091;3.山东思代尔农业装备有限公司, 德州 253600; 4.山东省马铃薯生产装备智能化工程技术研究中心, 德州 253600)
0 引言
马铃薯是中国第四大粮食作物,种植面积和总产量均居世界首位,但近几年马铃薯种植面积有所下降,装备支撑不足导致的种植成本增加是主要原因之一,严重影响薯农种植积极性[1-2]。2022年初,全国马铃薯耕、种、收及综合机械化率分别为78%、31%、32%和50.06%,远低于小麦、玉米和水稻三大主粮,尤其是机械化收获水平[3]。对于马铃薯收获,国内种植模式复杂多变,高效与低损收获难以兼顾。薯土秧杂分离效果不理想是影响机具作业效率和收获品质的关键[4-5],马铃薯秧蔓具有一定的韧性和强度,机收时会产生秧蔓缠绕杆条、团簇秧蔓堵塞分离和除杂部件等现象,导致含杂率过高,迫使机收后直接装箱、装袋及入库后的薯块需要二次清选,影响生产效率,也会增加薯块收获-清选-仓储整个机械化流程的伤薯率和破皮率[6-8]。在机械化分离、除杂、集薯和装袋环节产生的碰撞冲击是导致伤薯破皮的主要原因。伤薯率和破皮率较高,会导致马铃薯高病变率,影响储藏品质[9-11]。
在国外,德国GRIMME公司生产的VARITRON 470型马铃薯联合收获机,可实现浮动限深挖掘与坡地调平,可在粘重土壤条件下收获作业,对土块和石块等块状杂质具有较佳的清选性能;为降低含杂率,美国Double L公司生产的7340型马铃薯联合收获机,采用气流除杂、辊式清选和人工排杂相结合的方案,采用传感器实时监测作业数据和故障;意大利Spedo公司生产的SPRA-1/J型马铃薯收获机,配备人工分拣装箱平台,分离输送单元采用液压驱动,筛面两侧用于分拣薯块,筛面中间用于除杂。BULGAKOV等[12]建立了螺旋型薯土分离筛数学模型,探究了薯土秧杂运动过程关系,获得最佳结构和运行参数;OLT等[13]设计了V型分流装置,细碎土壤从分流装置与筛面的间隙穿过,马铃薯由橡胶材质分流器翼板向两侧分流输送,以实现缓冲减损与高效分离;BULGAKOV等[14]设计了一种马铃薯收获机挖掘装置,上叶片迫使薯垄表层土块破碎后运移至垄沟,下叶片将薯块挖掘而出运行至筛面,实现薯块和土壤的初步分离。
近年来,国内中机美诺1710A型、青岛洪珠4U-170B型和希森天成4ULZ-170型等马铃薯联合收获机均可实现薯土挖掘、输送分离、清土除杂和集薯装车等功能[15-16];吕金庆等[17]研制的马铃薯收获机薯秧分离装置采用挡秧杆、摘秧辊以及驱动辊等结构将秧蔓及杂草拽出,并通过秧蔓排放口排放至地面,解决秧蔓堵塞机具问题的同时,有效提高了薯秧、杂草等杂物的分离效率;魏宏安等[18-19]研制的4UFD-1400型马铃薯联合收获机,设置两级薯秧分离装置,一级薯秧分离装置为弹性梳杆摘辊式,二级茎秆分离装置为橡胶带式,确保不伤薯的同时能够有效分离薯秧、杂草及地膜等,收获过程耗用人工少,显著提高了作业效率;王相友等[20]针对机械化收获后含杂马铃薯物料中石块和土块的快速识别及除杂,提出了一种基于改进YOLO v4模型的薯杂检测方法,采用Mosaic数据增强的方法微调模型,实现了石块和土块的检测;杨然兵等[21]设计了一种马铃薯联合收获机辊组式输送分离装置,采用清土辊与光辊交替排列揉搓的方式实现清土除杂,能够更好地满足输送分离要求,有效提高了作业质量。
本文针对现有的马铃薯联合收获机薯土秧杂分离效果差、伤薯破皮严重以及后续清选除杂成本高等问题,采用薯土杂振动分离、拨板摘薯、人工辅助分拣除杂和自动装包卸包相结合的作业方式,研制一种装包卸包型马铃薯联合收获机。在阐述整机结构设计和工作原理的基础上,分析关键部件的设计过程与参数选取,以及薯块在双筛式薯杂分离阶段、拨板摘薯阶段、缓存集薯阶段和装包卸包阶段的运动轨迹和碰撞特性,对样机的损失率、伤薯率、破皮率和含杂率以及纯工作时间生产率等指标进行测试,以期达到减损增效的目的。
1 整机结构与工作原理
1.1 整机结构
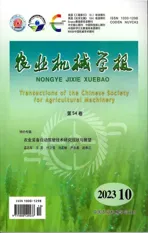
根据国内北方一作区马铃薯旱地垄播、单垄单行的种植模式,前期调研收获期垄型参数为:垄间距900 mm、垄顶宽度400 mm、垄底宽度700 mm、垄高240 mm、垄周长900 mm。结合马铃薯收获高效薯土秧杂分离以及装包卸包减损增效的现实需求,设计的装包卸包型马铃薯联合收获机如图1所示,采用拖拉机牵引作业方式,作业垄数为2垄,作业幅宽为1 700 mm,主要由松土限深装置、切土切蔓装置、挖掘装置、双筛式薯杂分离装置、拨板摘薯装置、集薯装包卸包装置等组成。
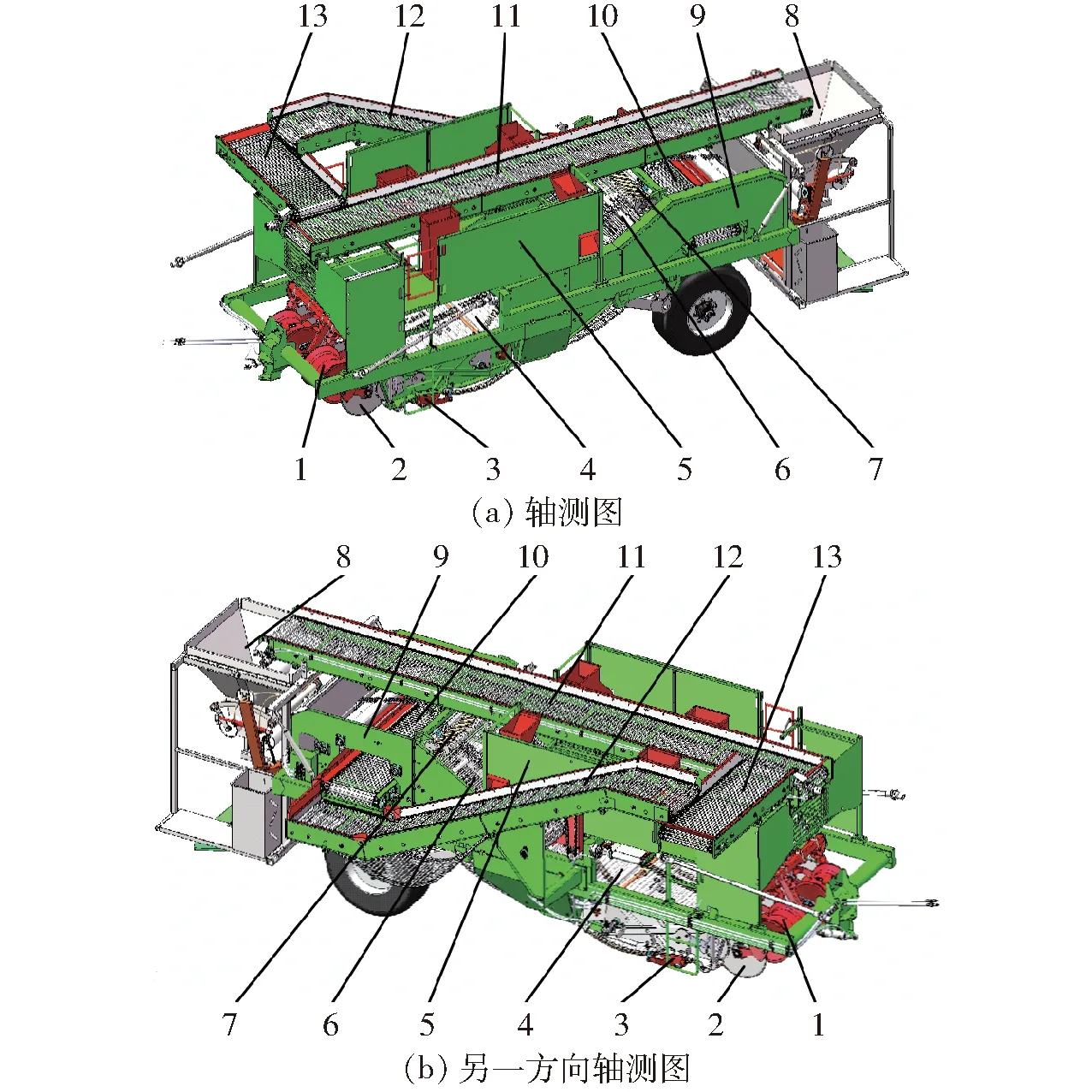
图1 装包卸包型马铃薯联合收获机总体结构图Fig.1 Overall structure diagrams of bagging and unloading potato combine harvester 1.松土限深装置 2.切土切蔓装置 3.挖掘装置 4.一级薯土分离筛 5.杂物分拣平台 6.双筛式薯杂分离装置 7.拨板摘薯装置 8.集薯装包卸包装置 9.机架 10.低位横向输送装置 11.分拣输送筛 12.侧升运装置 13.高位横向输送装置
机具可一次完成高效切土切蔓、限深挖掘、薯土杂振动分离、双筛式薯杂分层分离、拨板摘薯、人工辅助分拣除杂及干净马铃薯自动装包卸包等作业过程。在机械化杀秧、提前去除滴灌带的前提下,该机具适用于国内北方地势平坦宽广、地面起伏较小的地形。马铃薯收获机动力传递路线如图2所示。拖拉机动力输出轴经传动轴Ⅲ将动力传递至变速箱Ⅱ,变速箱Ⅱ一侧的输出轴通过传动轴Ⅰ将动力传递至变速箱Ⅰ,变速箱Ⅰ的输出轴通过传动轴Ⅱ和链传动将动力传递至低位横向输送装置,变速箱Ⅰ另一侧的输出链轮经链传动将动力传递至侧升运装置;变速箱Ⅱ另一侧通过链传动将动力分别传递至两级薯土分离筛,二级薯土分离筛的主动轴通过链传动将动力传递至薯秧分离筛。
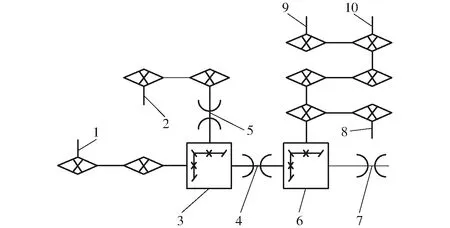
图2 马铃薯收获机动力传递路线Fig.2 Power transfer route of potato harvester1.侧升运装置主动轴 2.低位横向输送装置主动轴 3.变速箱 Ⅰ 4.传动轴Ⅰ 5.传动轴Ⅱ 6.变速箱Ⅱ 7.传动轴Ⅲ 8.一级薯土分离筛主动轴 9.薯秧分离筛主动轴 10.二级薯土分离筛主动轴
1.2 工作原理及主要技术参数
田间作业时,拖拉机牵引收获机前进,2组松土限深装置分别对应于薯垄上方位置,对板结土壤施压扰动,迫使薯土混合物处于相对松散状态;2对切土圆盘分别对应于薯垄两侧,完成垄侧土壤切沟和秧蔓的切断过程,起到减阻和防缠绕作用,减轻后续分离除杂部件的作业负担;薯土混合物经挖掘后,由一级薯土分离筛向后输送,在梅花轮驱动产生的筛面波动及振动装置的抖动碎土作用下,实现土块破碎和透筛分离;薯块经薯秧分离筛透筛后跌落至二级薯土分离筛,向后运行至低位横向输送装置,薯秧和杂草等柔性杂质经薯秧分离筛运行至杂质跌落通道,完成薯土杂二次分离;随后,薯土混合物经摘薯分离以及人工辅助分拣除杂后,干净的薯块被输送至位于集薯吨包中。
根据前期试验,为解决地轮较小而导致联合收获机作业通过性和灵活性较差的问题,选取外径为1.1 m,宽度为400 mm的地轮,并增加转向功能。为避免收获过程中物料堆积导致人工分拣除杂困难等问题,避免除杂不彻底的现象,在人工辅助分拣平台两侧增加投杂口,用于土块、石块、小薯和秧蔓等杂物的分拣投掷,实现马铃薯联合收获的精细化除杂作业。根据国内北方马铃薯垄作的主导种植模式及其农艺要求,装包卸包型马铃薯联合收获机主要技术参数如表1所示。

表1 装包卸包型马铃薯联合收获机主要技术参数Tab.1 Main technical parameters of the bagging and unloading potato combine harvester
1.3 主要技术及结构特点
装包卸包型马铃薯联合收获机采用薯土杂振动分离、双筛式薯杂分离、拨板摘薯、人工辅助清土除杂和自动装包卸包的作业方式,优势在于:
(1)双筛薯杂分离与拨板摘薯相结合。利用薯秧分离筛的被动振动作用与摘薯拨板的拨动作用,解决薯秧较难脱附分离的问题,避免薯块进入除杂通道,以此来降低含杂率和损失率。
(2)人工辅助分拣除杂。经过振动分离-双筛薯杂分离-拨板摘薯分离后的物料流,进入分拣平台,未被分离的块状杂质和秧蔓等由人工精细剔除,有效避免马铃薯二次清选分离,提高收获效率。
(3)缓存集薯装包,随重渐降卸包。采用柔性缓存料斗,可实现缓存和装包状态不停机自动切换;料斗内设有缓冲辊,能够降低马铃薯跌落的速度,有效吸收碰撞冲击能。
2 关键部件设计与参数确定
本文的挖掘装置采用前期设计的多铲片挖掘结构[11],具有良好的滑切性能,有利于减阻和切削。多个铲片间留有间隙,防止秧蔓和杂草缠绕挖掘部件,以确保挖掘效率。由前期马铃薯机收试验可知,杀秧后的秧蔓具有一定的强度和韧性[17],分离筛上的团簇秧蔓和较长的秧蔓清除困难,易与薯块混在一起并装入料斗车,含杂率过高,收获的薯块必须通过二次清选除杂才能够入库,增加清选除杂成本,加剧伤薯破皮现象。为确保薯杂分离效率和收获品质,以薯-土-秧等混合物清选分离特性分析为基础,采用多重分离和减损措施,确保摘薯效果,降低损失率;通过人工辅助分拣除杂作业,干净薯群进入具有缓存功能的料斗,实现自动装包卸包。
2.1 双筛式薯杂分离装置设计
双筛式薯杂分离装置如图3所示,主要由二级薯土分离筛、薯秧分离筛、驱动装置、换向胶轮和支承胶轮等组成,采用薯秧分离筛与二级薯土分离筛分层布置的结构形式,形成一个从筛面起始端到驱动端逐渐增大的楔角,沿着薯秧分离筛的运行方向看,两筛面工作段之间的距离逐渐增大。为确保薯秧分离效果,使薯秧分离筛的两相邻杆条间距较大,以承托团簇秧蔓等杂质;二级薯土分离筛的两相邻杆条间距相对较小,用于薯块与细碎土壤等杂质的分离,筛面杆条均采用“65Mn杆条包覆橡胶”的结构形式,以减损防损。

图3 双筛式薯杂分离装置结构图Fig.3 Structure diagram of double sieve potato impurity separation device1.薯秧分离筛换向胶轮 2.二级薯土分离筛换向胶轮 3.支承胶轮 4.二级薯土分离筛 5.二级薯土分离筛驱动装置 6.薯秧分离筛 7.薯秧分离筛驱动装置 8.被动振动胶轮
二级薯土分离筛采用梅花轮驱动结构,薯秧分离筛采用齿-杆啮合驱动结构。不同种植区域对于分离筛的线速度数值设定有差异,在线速度为1.15~1.85 m/s时,分离效果较好;当线速度超过1.85 m/s时,分离效果较差[22]。双筛式薯杂分离装置的传动系统如图3中ABC段所示,整个传动过程分为AB(二级薯土分离筛的传动过程)和BC(薯秧分离筛的传动过程)2段。2个阶段传动比为
(1)
式中iAB——二级薯土分离筛传动过程传动比
iBC——薯秧分离筛传动过程传动比
zbs——变速箱Ⅱ上输出链轮齿数
zstd——二级薯土分离筛一级输出链轮齿数
zstx——二级薯土分离筛二级输出链轮齿数
zsy——薯秧分离筛输出链轮齿数
ωst——二级薯土分离筛输出链轮角速度,rad/s
ωbs——变速箱Ⅱ上输出链轮角速度,rad/s
ωsy——薯秧分离筛输出链轮角速度,rad/s
两筛面的线速度为
(2)
式中vst——二级薯土分离筛线速度,m/s
Rst——二级薯土分离筛驱动轮半径,m
vsy——薯秧分离筛线速度,m/s
Rsy——薯秧分离筛驱动轮半径,m
联立式(1)、(2)可得
(3)
双筛式薯杂分离装置实物图如图4所示,利用两筛面之间楔角来实现分层分离,薯秧和杂草等柔性体杂质在薯秧分离筛杆条的拉拽作用下逐步被抽取,两筛面的线速度保持一致,避免两筛面的杆条对薯块碰撞摩擦而造成破皮损伤。为确保较佳的薯秧土杂分离效果和传动性能,二级薯土分离筛二级输出链轮齿数小于薯秧分离筛输出链轮的齿数,即zstx/zsy<1,若保证两筛面的线速度相同,薯秧分离筛驱动轮的半径Rsy需大于二级薯土分离筛驱动轮的半径Rst。因此,二级薯土分离筛驱动轮的半径Rst取75 mm,薯秧分离筛驱动轮的半径Rsy取140 mm。

图4 双筛式薯杂分离装置实物图Fig.4 Physical images of double sieve potato impurity separation device
由于薯秧分离筛杆条的拉拽作用,薯秧和杂草等柔性团簇杂质逐步从薯杂混合物中脱离,承托于筛面向后运行;薯块及细碎杂质跌落在二级薯土分离筛上,完成透筛分离。筛面杆条间距影响秧蔓分离效果和土壤透筛效果,当薯秧分离筛的相邻杆条间距较小时,一方面,薯块易从一根薯秧分离筛杆条被甩到相邻的杆条上,而落不到二级薯土分离筛,达不到薯秧分离的效果;另一方面,筛面与被动振动胶轮配合产生的振动幅度达不到薯秧分离的要求。薯秧分离筛杆条间距较大时,相邻杆条无法承托长度较短的秧蔓和杂草,导致大量团簇秧蔓和杂草落入二级薯土分离筛,与薯秧分离目的相悖。薯秧分离筛被动胶轮位置处实物图如图5所示。
北方马铃薯块茎长度一般在80~110 mm[17],为保证筛面与被动振动胶轮配合产生的振动幅度,以及薯秧分离筛相邻杆条间距可使薯块顺利落入二级薯土分离筛,结合秧蔓长度并参考国内外薯秧分离实际需求,将薯秧分离筛相邻杆条中心距确定为180 mm,薯秧分离筛上升段长度为2 540 mm,薯秧分离筛下降段的长度为720 mm,薯秧分离筛形成的“折线形”夹角为132°,将二级薯土分离筛相邻杆条中心距确定为45 mm。将杂质跌落通道设为上窄下宽的形状,避免团簇杂质产生拥堵。
2.2 拨板摘薯装置设计
拨板摘薯装置如图6所示,由调整装置、支撑杆和摘薯拨板等组成。调研及初步试验发现,在分离阶段末端部分薯块与秧蔓仍有连带作用,若不采取适当薯秧分离或摘薯措施,薯块会随着团簇秧蔓或者长条秧蔓进入杂质输送通道,增加损失率。
图6 拨板摘薯装置结构图Fig.6 Structure diagram of plate device for picking potatoes1.调整装置 2.支撑杆 3.扭簧 4.摘薯拨板
拨板摘薯运动过程及受力分析如图7所示,可分为薯块未接触摘薯拨板、薯块接触摘薯拨板及薯块被摘薯拨板拨下3种状态。
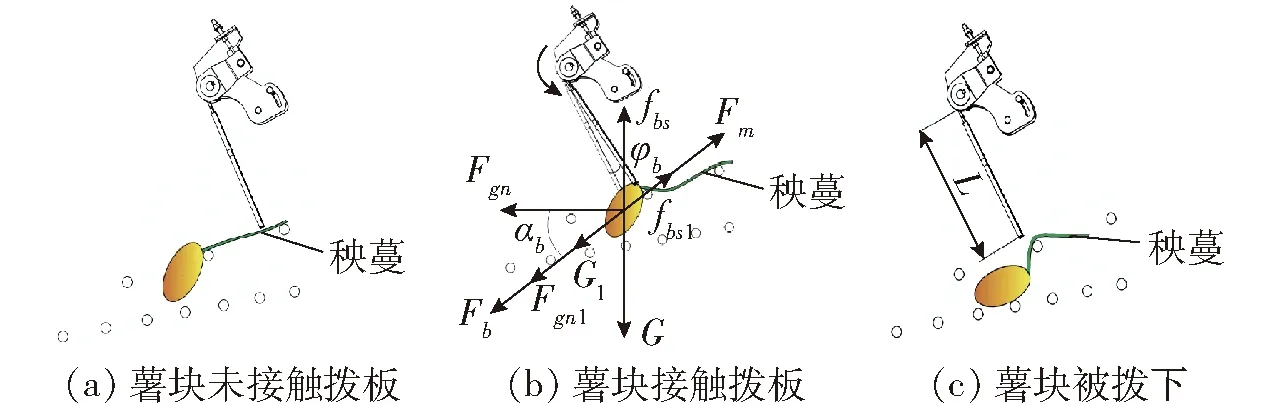
图7 拨板摘薯运动过程及受力分析Fig.7 Movement process and force analysis of plate device for picking potatoes
在薯秧分离筛的带动下,秧蔓夹带着个别薯块运行至拨板摘薯阶段时,摘薯拨板的自由端伸到薯秧分离筛工作段上方。为起到较好的拨动摘薯效果,考虑薯块最小三轴尺寸[23],以及薯秧分离筛的被动振动激励作用,摘薯拨板自由端与薯秧分离筛工作段之间的距离确定为0~16 mm。在扭簧作用下,摘薯拨板对连带在秧蔓上的薯块施加一定的阻力,将在薯秧分离筛上薯块从秧蔓上摘取下来。部分秧蔓与薯块一起跌落至二级薯土分离筛上时,经筛面分离后通过低位横向输送装置输送至杂物分拣平台待人工分拣。如图7b所示,对薯块接触摘薯拨板时进行受力分析,可得[24-25]
(4)
式中Fb——摘薯拨板对薯块的阻力,N
T——扭簧受到的扭矩,N·m
L——摘薯拨板长度,m
φb——摘薯拨板扭转角度,(°)
k——扭簧扭转刚度,N·m/(°)
结合式(4),得摘薯拨板对薯块的阻力为
(5)
其中
式中d——扭簧簧丝线径,m
E——扭簧材料弹性模量,MPa
n——扭簧受力有效圈数,取6
D——扭簧中径,m
65Mn扭簧弹性模量为2.10×105MPa[26]。随着薯秧分离筛的向后运行,当薯块推动着摘薯拨板扭转到极限角度时,以摘薯拨板末端线速度方向为正方向,若薯块受到的合力小于0,薯块易随团簇秧蔓或长条秧蔓进入杂质输送通道。若要薯块被摘下,须满足
(6)
式中Fgn——薯秧分离筛杆条对薯块的支持力,N
Fgn1——Fgn在摘薯拨板对薯块阻力方向的分力,N
Fm——秧蔓对薯块的拉力,N
G——薯块重力,N
G1——薯块重力在摘薯拨板对薯块阻力方向的分力,N
fbs——薯秧分离筛杆条对薯块的摩擦力,N
μbs——薯块与杆条之间摩擦因数
fbs1——fbs在摘薯拨板对薯块阻力反方向上的分力,N
αb——支持力Fgn与阻力Fb夹角,(°)
对式(5)、(6)进行分析,可得
(7)
摘薯拨板装置的两端固定在机架上,上方邻近分拣输送筛,综合考虑摘薯拨板与薯秧分离筛的位置关系以及拨板摘薯装置与分拣输送筛的空间布局,整体尺寸不宜过大,将薯秧分离筛筛面与拨板下方交接处距离分拣输送筛底部尺寸确定为 580 mm; 为保证拨板摘薯装置能有良好的高效低损摘薯效果,防止与薯秧分离筛和分拣输送筛产生干涉,摘薯拨板长度取370 mm、宽度取58 mm;此外,对摘薯拨板的外层包覆一层橡胶材料,以减少薯块与摘薯拨板之间的碰撞损伤。拨板摘薯装置实物图如图8所示。

图8 拨板摘薯装置实物图Fig.8 Physical image of plate device for picking potatoes
摘薯拨板对薯块的阻力是薯块能否被成功摘下的关键,主要与扭簧的扭转刚度、摘薯拨板的扭转角度以及长度有关,由式(7)可知,摘薯拨板的长度为固定值,扭簧的扭转刚度与扭转角度成反比。扭簧扭转刚度过小时,会导致薯块与摘薯拨板接触产生作用力时的扭转角度过大,薯块容易从摘薯拨板下板面穿过而进入杂物通道;扭簧扭转刚度过大时,易导致摘薯拨板对薯块作用力过大而造成破皮或机械损伤,也会增大薯块在分离筛筛面上的行程。由于摘薯拨板的板间距过大易导致薯块从间隙穿过随着秧蔓进入杂质通道,因此相邻的摘薯拨板间距应小于薯块三轴尺寸的最小尺寸,取 50 mm;按照作业幅宽1 700 mm计算,将摘薯拨板数量确定为16个。
2.3 杂物分拣平台设计
马铃薯联合收获虽然占用劳动力少,但分离后的薯块中含有较多的秧杂、土块及石块等,无法作为商品薯直接装包入库或投放市场,一般需要进行二次清选和分选[27-29]。为将联合收获后的马铃薯作为商品薯直接入库,需对碎秧、石块、土块等大颗粒杂质进行剔除作业,设计的杂物分拣平台如图9所示。杂物分拣平台上方设有分拣输送筛,薯块流及掺杂的少量秧蔓、杂草、石块和土块等进入分拣输送筛,分拣输送筛两侧为杂物分拣工作区。

图9 杂物分拣平台Fig.9 Platform for impurity sorting1.斜杂投口 2.站台 3.直杂投口 4.防护板
综合考虑成年人的体型以及侧身展臂的舒适程度,结合收获机的实际尺寸,设计杂物分拣工作区域长度为3 370 mm,将人工辅助分拣平台的除杂输送筛宽度设计为720 mm,可容纳6名捡拾工进行杂质剔除作业,设有2个直投杂口和2个斜投杂口。物料输送过程中,4名捡拾工捡拾相对较大的块状杂质、秧蔓和杂草等柔性体杂质,投入到直投杂口内排出;2名捡拾工捡拾相对细碎的杂物,投入斜投杂口内,排出至机具两侧。
2.4 集薯装包卸包装置设计
集薯装包卸包装置结构如图10所示,由缓存料斗、缓冲辊、浮动臂、限位辊、装包卸包滑台、踏板、挡秧板和托架外导轨等组成。作业前,装包卸包滑台为水平布置;收获作业时,薯块、土块、秧蔓和杂草经多重分离之后,干净的马铃薯物料流由分拣输送筛输送至集薯装包卸包装置的缓存料斗,再经缓存缓冲后装入集薯吨包。

图10 集薯装包卸包装置结构示意图Fig.10 Structure diagram of potato gathering bagging and unloading device1.缓存料斗 2.缓冲辊 3.浮动臂 4.限位辊 5.装包卸包滑台 6.踏板 7.挡秧板 8.托架外导轨 9.液压缸
2.4.1装包过程的马铃薯运动学及碰撞特征分析
在装包初期,装包卸包滑台随着升降组的液压缸的伸长上升至最高位置进入装包状态,缓冲集薯装置的液压缸的缸杆处于伸长状态,带动液压缸两端的浮动臂和限位辊绕着缓冲集薯架的限位装置朝外偏移,迫使缓存料斗的出口打开而进入装包状态。薯块在装包过程的运动轨迹如图11所示,可分为OA段(薯块自分拣输送筛跌落至缓冲辊)、AB段(薯块自缓冲辊跌落至限位辊)以及BC段(薯块自限位辊跌落至集薯吨包)。
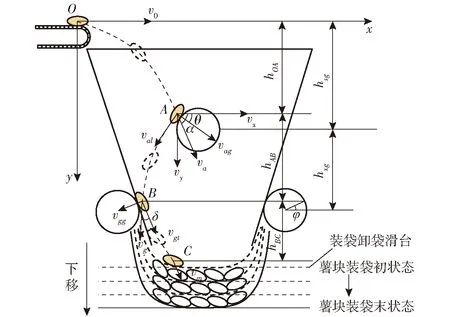
图11 装包时马铃薯运动学分析Fig.11 Kinematic analysis of potato bagging
薯块从分拣输送筛末端跌落至缓冲辊的过程为平抛运动,如图11中OA段的运动过程。以分拣输送筛末端的薯块中心点O为原点,分拣输送筛运行方向为x轴正方向,铅垂向下为y轴正方向建立直角坐标系。将薯块视作质点,当薯块从分拣输送筛以水平速度v0抛落至缓存料斗时,重力加速度g取9.8 m/s2。假设缓冲辊与限位辊的半径均为R,OA段薯块运动方程为
(8)
式中vx——薯块在与缓冲辊刚接触时在水平方向上的分速度,m/s
vy——薯块在与缓冲辊刚接触时在铅垂方向上的分速度,m/s
hOA——薯块自分拣输送筛跌落至缓冲辊的铅垂高度,m
hsg——分拣输送筛末端的薯块与缓冲辊圆心的铅垂高度,m
θ——法向速度vag与速度vx夹角,(°)
薯块跌落的瞬时速度v0与分拣输送筛的运行线速度vs相等,即
(9)
式中vs——分拣输送筛运行线速度,m/s
ns——分拣输送筛液压马达输出轴转速,r/min
D1——分拣输送筛换向轮分度圆直径,m
D2——分拣输送筛上连接带厚度,m
薯块损伤主要来自薯-薯碰撞和挤压、薯块与缓冲辊及限位辊的碰撞冲击以及薯块与装包卸包滑台的碰撞冲击,缓存料斗内部、缓冲辊以及限位辊均覆有缓冲材料,薯块通过缓冲辊与限位辊的2次缓冲减速运行,缓冲材料能有效吸收碰撞冲击能,减轻薯块因碰撞冲击、摩擦等作用而导致机械损伤或切线擦伤。当薯块碰撞到缓冲辊时,缓冲辊能有效吸收法向速度带来的冲击能,减小薯块运动速度,薯块跌落至缓存料斗出口两侧的限位辊处,其运动过程如图11中的AB段所示。薯块与缓冲辊碰撞接触时的速度和碰撞后的跌落速度为
(10)
式中va——薯块与缓冲辊碰撞接触时速度,m/s
α——速度va与薯块水平方向速度夹角,(°)
val——薯块碰撞缓冲辊后跌落速度,m/s
联立式(8)~(10)并计算得
(11)
薯块在AB段运动过程满足能量守恒定律,其运动分析过程为
(12)
式中Ekal——薯块自缓冲辊跌落时的动能,J
Ekg——薯块跌落到限位辊上的动能,J
m——薯块质量,g
vg——薯块与限位辊碰撞时速度,m/s
hAB——薯块自缓冲辊跌落至限位辊的铅垂高度,m
hxg——缓冲辊与限位辊铅垂高度,m
φ——薯块碰撞到限位辊的法向速度与限位辊中心水平线夹角,(°)
根据式(12)可得薯块碰撞到限位辊速度为
(13)
薯块自缓冲辊跌落到限位辊后,限位辊吸收了碰撞接触时法向速度带来的冲击能,同时也降低了薯块跌落速度,薯块低速跌落到集薯吨包中,运动过程如图11中BC段所示。BC段运动方程为
(14)
式中vgt——速度vg的切向速度,m/s
δ——速度vg与切向速度vgt夹角,(°)
vm——薯块跌落到集薯吨包中的速度,m/s
hBC——薯块自限位辊跌落至集薯吨包中的铅垂高度,m
随着跌落至集薯吨包内的薯块越来越多、物料质量逐渐增加,装包卸包滑台的升降组的液压缸缸杆处于缩回状态,在重力作用下升降底架与装包卸包滑台逐渐下降,使得薯块跌落的铅垂高度hBC控制在合适的范围内,以确保薯块跌落到装包卸包滑台上的临界速度小于薯块跌落损伤的临界速度。将式(13)代入式(14)并分析计算可得马铃薯跌落速度vm为

(15)
由式(15)可知,薯块的跌落速度主要与缓冲辊和限位辊的外径尺寸以及薯块各个运动阶段的跌落高度有关。缓冲辊和限位辊的外径尺寸对薯块最终跌入集薯吨包产生的损伤有至关重要的影响。缓冲辊和限位辊的外径较小时,部分薯块接触不到缓冲辊,碰撞冲击较为剧烈,加剧伤薯破皮现象[30-32];反之,薯块从缓冲辊跌落到缓存料斗滑落距离较大,薯-料斗的摩擦作用会增加破皮率。在薯块与包覆有海绵的聚氨酯材料碰撞试验基础上,将缓冲辊和限位辊的半径R确定为100 mm(包覆有70 mm厚度的海绵材料),薯块跌落轨迹最理想,减损效果最好。查阅文献,环境温度、碰撞接触材料和薯块跌落角度也是影响薯块碰撞损伤的主要因素,如马铃薯在15℃时与包覆有塑料的65Mn钢杆碰撞的临界损伤速度为2.506 m/s[33],在跌落角度为60°时与覆有橡胶材料的65Mn杆条碰撞的临界损伤高度为275 mm[34]。缓冲辊和限位辊均包覆有海绵的聚氨酯材料,薯块跌落临界损伤速度阈值相比于包覆有橡胶65Mn杆条更具有包容性。
综合考虑整机高度及薯块不同运动阶段的跌落高度,将分拣输送筛与缓冲辊铅垂距离hsg设为500 mm,缓冲辊与限位辊的铅垂高度hxg设为430 mm,结合缓冲辊和限位辊的外径尺寸,可得薯块自分拣输送筛跌落至缓冲辊的铅垂高度hOA及薯块自缓冲辊跌落至限位辊的铅垂高度hAB理论范围在330 ~500 mm之间,此时薯块碰撞冲击较小;装包卸包滑台表层附有橡胶垫,装包初期,装包卸包滑台距离缓存料斗出口较近,经过缓冲辊和限位辊的2次缓冲后,薯块自限位辊跌落至集薯包的速度vgt较小,由薯块碰撞试验及结合相关资料[34],限位辊到装包卸包滑台最小铅垂距离设为250 mm。
薯块自限位辊跌落至集薯吨包内,随着薯块重量增加,装包卸包滑台逐渐往下移,由初始时的薯-滑台碰撞逐渐变为薯-薯碰撞,薯块自限位辊跌入集薯包的铅垂高度hBC始终控制在250~350 mm之间,当集薯吨包装满时,装包卸包滑台下移至最低点;液压缸伸展至极限时,若2个限位辊之间的距离过小,单位时间内落入集薯吨包的薯块流量较小,影响装包效率;反之,易导致薯块跌落至集薯吨包外造成碰撞损伤。为保证薯块顺利跌落至集薯吨包内,结合分拣输送筛的宽度及集薯吨包开口处尺寸(1 000 mm×1 000 mm),液压缸伸展至极限时两个限位辊的距离取1 100 mm。
2.4.2缓存过程的马铃薯运动学及碰撞特征分析
缓存状态时马铃薯运动学分析如图12所示,可划分为:OA段(薯块自分拣输送筛跌落至缓冲辊)、AD段(薯块自缓冲辊跌落至缓存料斗内壁)及DE段(薯块自缓存料斗内壁滑落至限位辊)。当集薯吨包内的薯块装满时,浮动臂和限位辊绕着缓冲集薯架的限位装置朝内偏移,迫使缓存料斗的出口闭合,进入缓存集薯状态,分拣输送筛不断地将干净的薯块喂入料斗,薯块与缓冲辊碰撞减速后跌落到缓存料斗内壁上,与底部限位辊碰撞接触。

图12 缓存状态时马铃薯运动学分析Fig.12 Kinematic analysis of potato in cache state
由式(8)~(10)可得薯块自缓冲辊跌落至缓存料斗内壁(AD段)的初速度val,满足能量守恒定律,即
(16)
式中Ekd——薯块跌落到料斗内壁的动能,J
hAD——薯块自缓冲辊跌落至缓存料斗内壁的铅垂高度,m
vd——薯块落到料斗内壁的速度,m/s
联立式(11)、(16)并计算可得
(17)
薯块跌落到缓存料斗内壁后,运动轨迹再次发生改变,法向分速度vdd带来的冲击能被缓冲材料吸收,以跌落至料斗内壁的切向分速度滑落至限位辊处,其运动轨迹为图12中DE段的过程。薯块跌落到缓存料斗内壁的切向分速度vdk为
vdk=vdcosγ
(18)
式中γ——薯块与缓存料斗内壁碰撞后速度vd与缓存料斗内壁的夹角,(°)
薯块自缓存料斗内壁滑落至缓存料斗底部限位辊的过程满足能量守恒定律,即
(19)
式中Ekdk——薯块自缓存料斗跌落时动能,J
Ekk——薯块跌落到限位辊的动能,J
hDE——薯块自缓存料斗内壁滑落至限位辊的铅垂高度,m
vk——薯块滑落到限位辊的速度,m/s
联立式(17)~(19)并计算可得
(20)
其中α为OA段薯块碰撞到缓冲辊的速度与薯块水平方向速度的夹角。分析可知,薯块滑落到限位辊的速度vk与分拣输送筛的线速度vs有关,薯块跌落初速度越大,滑落到缓存料斗底部缓冲辊的速度越大,碰撞冲击剧烈,破皮伤薯越严重。结合前期试验,分拣输送筛换向轮分度圆直径D1取125 mm,连接带厚度D2取27 mm,液压马达转速ns为32 r/min,代入式(9)可得分拣输送筛线速度vs的理论值为0.3 m/s。缓存状态下,两个限位辊接触闭合,两个限位辊中心距离由装包时的1 100 mm调整为200 mm,缓存料斗侧壁出口端随之向两个限位辊聚拢,薯块跌落点朝着缓冲辊中心方向上移,薯块自缓冲辊跌落至缓存料斗内壁的铅垂高度hAD减小,根据两个限位辊中心距离的变化及缓存料斗侧壁长度,得出缓存料斗从装包状态到缓存状态的角度变化,将薯块自缓冲辊跌落至缓存料斗内壁的运行轨迹近似为直线,由相似三角形定理,得出薯块自缓冲辊跌落至缓存料斗内壁的最大理论铅垂高度hAD约为100 mm;随着缓存薯块增多,由薯-辊碰撞变为薯-薯碰撞,薯块自缓存料斗内壁下滑限位辊的铅垂高度hDE的距离减小,可减轻薯块损伤,将薯块自缓存料斗内壁滑落至限位辊的最大铅垂高度hDE确定为330 mm。
缓存状态时,将集薯吨包从吊挂轮上摘下,卸包装置的摆动缸的伸缩杆伸出,包括卸包滑台在内的整个装包平台绕着缓冲架摆动,迫使卸包滑台的输送带逐渐倾斜,输送带一端的位置靠近地表,卸包滑台的输送带下方设置有多根横向布置的承托辊,集薯吨包可顺畅下滑至地表。随后,将下一个集薯吨包挂到吊挂轮上,调整卸包滑台的位置和缓存料斗的状态,再一次完成装包卸包。
3 试验
试验地位于内蒙古自治区杭锦旗独贵塔拉镇百世基地,属温带大陆性季风气候,年平均气温为6℃,年平均降水量为250 mm,年平均无霜期170 d。种植模式为单垄单行种植,中性土壤,土壤含水率为9.5%~12.3%,未覆膜种植,机械化播种作业,株距为200 mm。品种为“希森3号”,收获前7 d进行机械化杀秧。在结合马铃薯种植农艺及前期初步试验的基础上,挖掘深度设定为220 mm,配有6个捡拾工人分布在杂物分拣平台两侧捡拾除杂,估算装包效率为13 000 kg/h左右。马铃薯联合收获机作业时采用尺寸为1 000 mm×1 000 mm×1 000 mm方形集薯吨包,集薯吨包开口处尺寸为1 000 mm×1 000 mm,作业速度分别设定为3.01、3.95 km/h,其测试结果如表2所示。
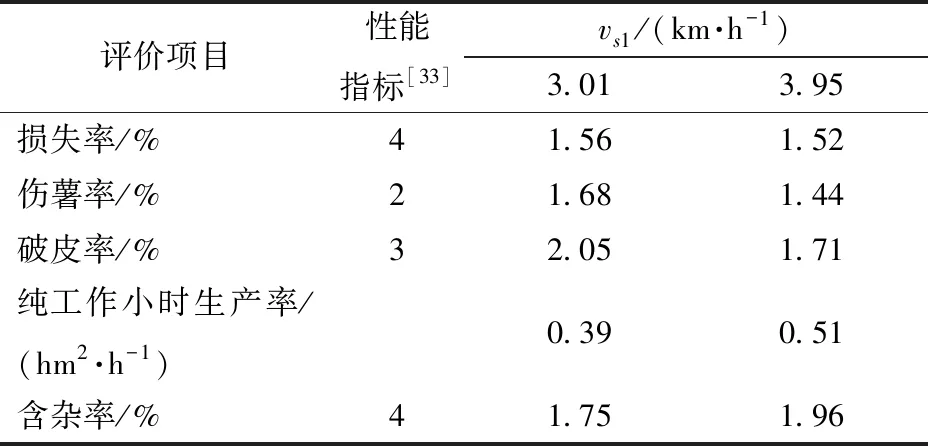
表2 样机评价指标测试结果Tab.2 Assessment index test results of prototype
由表2可知,各项参数均满足NY/T 648—2015《马铃薯收获机质量评价技术规范》的要求。当作业速度由3.01 km/h提高至3.95 km/h时,纯工作时间生产率由0.39 hm2/h提高至0.51 hm2/h,对应的伤薯率和破皮率却明显降低,但含杂率明显增加。这是由于在其他因素不变的情况下,作业速度的增加使得单位时间内进入一级薯土分离筛的薯土混合物总量增加,进入双筛式薯杂分离装置、辅助分拣平台甚至是集薯装包卸包装置的杂质总量增加,造成在同阶段的薯土分离、除杂和人工分拣条件下的杂质分离与分拣负担相对增加,导致杂质分离不彻底。因此,作业速度是影响破皮率、伤薯率以及含杂率的关键。
装包卸包型马铃薯联合收获机连续作业能力较佳,挖掘、松土限深调控、一级薯土分离、双筛式薯杂分离、拨板摘薯、人工辅助分拣和集薯装包卸包等各环节作业顺畅,工作可靠性好。田间试验如图13所示。在双筛式薯杂分离和拨板摘薯装置的协同作用下,可实现较佳秧蔓分离效果,避免薯块汇入秧蔓杂质物料中,减少损失率;6个捡拾工人分布在分拣平台,可降低含杂率。

图13 田间收获试验Fig.13 Field experiment of harvest
试验过程中,集薯装包卸包装置可将干净的薯块直接装包;当集薯吨包内装满薯块,更换集薯吨包时缓存料斗的出口暂时关闭,薯块暂存于缓存料斗,可实现不停机换包作业,确保收获效率;装包卸包滑台可实现随重渐降,避免薯块跌落高度过大,以减轻破皮伤薯现象;装满薯块的集薯吨包承托在装包卸包滑台上平顺下滑至地面,避免造成薯块压溃性损伤[36-37]。对于折叠臂集薯输送装置,通过电子马铃薯测试收获过程的碰撞特征,得到落料端是产生高幅值碰撞冲击的主要源头,而柔性缓冲辊、限位辊和缓存料斗的缓冲作用,可减轻跌落过程机械冲击,对薯块集薯装包过程和缓存集薯过程均可实现减损防损。通过电子马铃薯测试手段,得知薯块的碰撞加速度峰值低于折叠臂集薯输送装置落料端的碰撞加速度峰值,这是由于薯块在包覆有海绵的聚氨酯材料的弹性变形作用下实现减损控制,充分说明柔性缓存集薯和装包方式具有良好的降低碰撞冲击作用[11,38],有利于确保收获品质。观察发现,收获速度的增加导致单位时间内与柔性缓冲辊碰撞接触的薯块数量增多,薯-薯之间碰撞冲击产生了相对较大的碰撞加速度,这进一步说明收获速度对薯块缓冲减损效果具有较大影响[39-40]。
4 结论
(1)研制的装包卸包型马铃薯联合收获机采用薯土杂振动分离、双筛式薯杂分离、拨板摘薯、人工辅助分拣除杂和自动装包卸包相结合的收获工艺,可一次完成限深挖掘、双筛式薯杂分离、拨板摘薯、分拣除杂及自动装包卸包等作业过程。
(2)田间试验表明,当收获速度为3.01 km/h和3.95 km/h时,生产率分别为0.39 hm2/h和0.51 hm2/h,损失率分别为1.56%和1.52%,伤薯率分别为1.68%和1.44%,破皮率分别为2.05%和1.71%,含杂率分别为1.75%和1.96%,均符合相关标准要求。
(3)拨板摘薯装置可实现薯秧脱附分离,降低损失率;缓存集薯装包与随重渐降卸包技术,可实现缓存和装包状态自动切换,确保不停机柔性集薯与减损卸包。装包卸包装置的柔性缓冲辊对薯块抛落集薯装包过程起到较佳的减损效果。