江西无人直升机航空应急测绘系统的建设与实现
2023-11-22万小飞
万小飞 杨 超
(江西省自然资源测绘与监测院 江西南昌 330002)
1 引言
近年来,各种重大自然灾害和突发公共事件灾害的不断增多,测绘保障服务在应急救灾工作中的作用日益凸显[1-2]。如何以最快的速度为决策指挥提供“灾区第一张图”是应急测绘工作的关键。为形成全国范围快速、高效的应急测绘保障能力,国家层面组织开展国家应急测绘保障能力建设项目[3-11]。江西无人直升机航空应急测绘系统作为国家应急测绘保障能力建设体系十分重要的内容,承担着江西省全域的航空应急测绘保障任务,实现对突发事件现场信息高分辨率、全天时、全天候的快速获取,具备快速机动至前线、24 小时保障的能力,将“第一时间”现场获取时间缩短至6 小时以内。本文首先介绍了江西无人直升机航空应急测绘系统的总体结构,然后从系统功能设计、系统信号流程、系统集成控制等三个方面详细阐述和探讨了系统的建设与实现过程。系统的建成大大提升了我省的应急测绘保障能力,为我省的应急救灾提供了强有力的技术支撑。
2 系统总体结构
系统主要承担应急前线机动灵活的地理信息获取任务,满足城市及中小范围应急现场信息的快速获取需求。总体结构由飞行器分系统、传感器分系统、指挥控制分系统、综合保障分系统及运输设备分系统构成,如图1 所示。
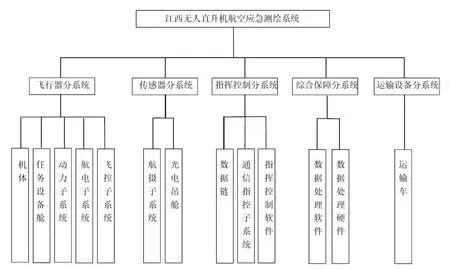
图1 系统总体结构
(1)飞行器分系统:是传感器设备的载体,搭载传感器完成飞行任务,获取现场信息。由机体结构子系统、任务设备舱、动力子系统、航电子系统、飞控子系统等部分组成。无人机机体结构是飞行器的主体结构,任务设备舱用于无人机安装任务设备。动力子系统为飞行器的起降和空中飞行提供动力,包括发动机和燃油系统。航电子系统为无人机提供机载供电和测控链路。飞控子系统主要是确保飞行器能稳定可靠地按指令飞行。
(2)传感器分系统:主要用于获取应急前线的影像和视频数据,由航摄子系统和光电吊舱组成。航摄子系统包括光学面阵传感器、航摄控制器、定位定姿系统和集成座架。光电吊舱主要包括可见光视频传感器和热红外视频传感器,具有目标区域的全天候观测功能,能对目标区域进行高清可见光摄像和红外成像。
(3)指挥控制分系统:承担对飞行器与传感器的指挥控制,由数据链、通信指控子系统及指挥控制软件组成。数据链通信距离为50km,带宽为8MHz,包括L频段和UHF频段两个链路。通信指控子系统在测控储运一体车内部布设了3 联柜操作台,分别为飞行控制席、任务监控席、链路监控席。指挥控制软件包含了Z-5 型无人直升机飞行监控软件与链路监控软件。
(4)综合保障平台分系统:可实现现场多源遥感数据的快速处理,满足突发事件现场信息的获取需求,具备航摄方案设计,现场视频数据处理,影像预处理,POS 数据后处理,以及突发事件现场快速镶嵌图和影像图快速制作的能力。如图2 所示。
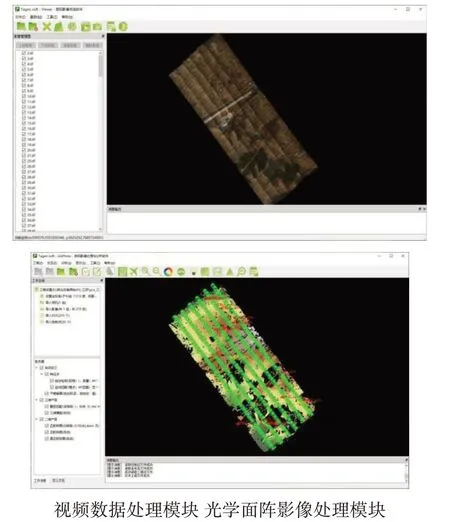
图2 综合保障平台分系统软件模块
(5)运输设备分系统:通过车辆改装与设备集成,实现系统设备运输,并为外场作业提供供电、操控与数据处理工作环境、通信等综合保障。系统由1辆无人直升机运输车组成,集存储运输、指挥控制、数据处理等功能于一体。由于无人直升机需要开赴突发事件现场周边进行作业,要求运输设备具有较好的机动能力、加固和保护能力。
3 系统功能设计
结合我省应急保障的实际需求,系统总体功能需满足快速灵活、操作简便、24小时保障、实时处理、机动运输等要求,以适宜于应急灾害现场数据的快速实时获取,主要从机动飞行与控制功能、多源遥感信息获取功能、快速处理功能以及机动运输功能四个方面进行设计。
(1)机动飞行与控制功能可实现从应急灾害现场附近起飞,具备不小于2 小时的续航能力和大于20 千米的近距离控制能力;能够应对各种气候和地形干扰,以便最大程度地实施应急测绘工作保障;具备定点起飞、降落,低空悬停等无人驾驶飞行能力。
(2)多源遥感信息获取功能能够实现对可见光和近红外视频以及光学影像的同步获取以及全天24小时各种气候的现场数据获取能力,以应对各种突发事件对数据种类及精度的需求;能够第一时间通过微波设备将视频信息回传至地面综合保障平台,同时通过视频传输设备将现场视频实时回传到江西省应急资源数据共享平台,为决策指挥提供可靠信息。
(3)快速处理功能需具备根据应急前线现场气候和地形条件进行航线快速布设及调整、现场影像数据预处理、影像数据快速拼接、影像图现场制作、视频数据实时镶嵌等功能,为决策指挥提供“灾区第一张图”。
(4)机动运输功能需具备越野和长途跋涉性能,适应较复杂地理环境下的道路和长距离行驶,能快速抵达灾区指定现场;具备承载相关设备所需的动力、空间和结构;具备地面指挥控制设备及数据处理软硬件等装备的运输与保障能力;能够对设备进行加固和保护,满足电磁屏蔽、抗冲击、抗振动等要求。
4 系统信号流程
江西无人直升机系统的信号流程为:无人直升机通过数据链下传无人机遥测信息、光电吊舱状态信息、视频信息、影像处理数据;无人机测控数据通过链路下传至飞控地面端并显示无人机状态信息,飞控地面端通过链路发送指令实现对无人机的控制;载荷地面站接收吊舱视频数据实现可见光/红外视频显示,同时发送相机控制指令,实现对光学面阵传感器的指令控制;吊舱控制台向光电吊舱发送地面控制指令,实现对光电吊舱的操控;图形处理单元接收机上影像处理数据完成实时拼接并显示。
5 系统集成控制
飞行器分系统通过供电设计、挂载设计和控制设计实现与传感器分系统的集成;指挥控制分系统与综合保障平台分系统通过飞控协议、载荷控制协议、数据传输协议设计经数据链完成与飞行器、传感器的对接;运输设备分系统通过改装运输车实现承载和运输其他四个分系统设备。
(1)机载集成控制
将航摄子系统和光电吊舱等传感器集成安装在具有足够强度和刚度的结构支架上,选取最前端任务舱作为载荷安装点,实现载荷自身的集成化和载荷与无人直升机平台的一体化集成。将光学面阵传感器与定位定姿系统中的IMU 安装于集成座架,三者进行一体化设计后通过座架减震器与飞行平台进行连接,定位定姿系统的POS 直接安装于飞行平台的设备舱内,光电吊舱作为独立的设备与飞行平台直接连接。各载荷进行集中供电和作业控制,供电电压28VDC,电压范围24~32V。定位定姿系统输出2路PPS信号,用于光学面阵传感器输出影像数据和光电吊舱输出视频数据的时间同步,以便于地面图形处理单元进行高精度影像数据处理。
(2)地面集成控制
通过对地面设备进行安装集成和控制集成,实现对整个无人直升机航空应急测绘系统地面部分的集成控制。指挥控制分系统中除数据链机载端(含天线)与无人机集成在一起,其他部分如飞控地面站、载荷地面站、数据链地面端(含天线)均与运输车完成集成,飞控控制席、任务控制席、链路控制席均集成在运输车上,为改善通视条件,提高测控距离,UHF 和L 两个频段天线集成在车顶。在运输车工作区设置机柜和操作台,载荷地面站和高性能图形处理单元固定在机柜内,配备座椅,工作人员可以在这里进行载荷操控和应急测绘数据处理。运输车通过车载发电机发电经UPS 输出220V 交流电为高性能图形处理单元、飞控地面站、载荷地面站、数据链地面端(含天线)设备供电。数据链(L)、工控机通过网口与交换机相连,实现光电吊舱、数据链遥控遥测数据的发送和接收,完成机载视频解码,实现视频记录快视。高性能图形处理单元网口连接交换机,接收机载处理后的影像数据进行拼接显示,接收可见光视频进行视频实时拼接。数据链天线接口与车顶天线相连,实现与机载设备进行通信。
6 系统实现
按照上述建设方法实现的江西无人直升机航空应急测绘系统,在生产基地进行了飞行测试,测试区域面积约为1 平方千米,飞行高度约200 米,系统实时获取了测试区域范围内的高清影像数据和热红外视频数据,光电吊舱获取的视频数据回传至综合保障平台进行实时拼接,形成的影像快速镶嵌图精度优于50 米。完成飞行任务后,光学面阵传感器获取的影像数据在1 小时内通过“一键快拼”生成了现场影像图,通过已知控制点进行验证,影像图平面精度优于2 米。经测试,系统能较好地满足我省应急测绘保障的需求。
7 结束语
江西无人直升机航空应急测绘系统利用3S 技术,基于车载平台,集成了航线规划系统、数据快速获取系统、视频影像快速处理系统等软硬件设施,大大提升了我省突发事件现场信息快速获取能力,本文从系统功能设计、系统信号流程、系统集成控制等三个方面详细阐述和探讨了系统的建设过程,可为同类无人机航空应急系统的研究与建设提供参考。