含时滞轨道吸振器的建筑结构的动力学分析*
2023-11-18管明杰茅晓晨
管明杰 茅晓晨
(河海大学 力学与材料学院,南京 211100)
引言
建筑结构在地震、风等动力荷载作用下,会产生较大的振动响应,导致结构的变形和破坏[1].随着现代制造技术的快速发展,建筑结构更加轻柔化和复杂化,其振动现象日益显著.例如,摩天大厦中的悬挑、不规则等设计会造成结构刚度突变,诱发大幅的持续振动[2].为了有效抑制结构的振动水平,人们提出了多种控制方法,如非线性吸振器等.
非线性吸振器能够有效拓展减振带宽和提升鲁棒性.目前,非线性吸振器的种类和形式不断更新,如分段线性式[3-4]、碰撞式[5-6]、轨道式[7-9]等.轨道式吸振器通过设计轨道形状提供不同形式的非线性作用力,并在土木工程中得到了应用.例如,轨道吸振器可以将输入建筑结构的能量从低阶模态向高阶模态转化,从而快速有效地衰减结构响应[7].Lu等人提出了一种轨道非线性能量汇,给出了与质量比和轨道形状相关的优化设计过程,并在五层钢框架结构上进行了一系列振动试验,有效验证了轨道吸振器的良好减振性能[8].此外,单边碰撞的轨道非线性吸振器不仅能够吸收和耗散建筑结构的能量,还可以在结构刚度和输入能级变化时表现出很强的鲁棒性[9].
近年来,主动控制备受关注,能够提升控制效果和适应复杂工况.在控制过程中,传感器、滤波器、控制器、作动器等环节中存在时滞效应.Olgac首次提出了时滞动力吸振器的概念[10].徐鉴教授团队长期从事时滞吸振器的研究,取得了许多重要进展,并得到了实际应用[11-13].Zheng等人研究了具有时滞加速度反馈的主动质量阻尼器对建筑结构的振动控制问题,给出了控制增益和时滞的参数空间中的稳定区域[14].Bellizzi等人考察了时滞主动阻尼非线性吸振器,基于复变量平均法和几何奇异摄动法预测了周期响应和准周期响应.结果表明,较小的时滞会导致系统状态发生重大变化,如抑制准周期响应区域和降低振动水平[15].Mohanty等人提出了具有时滞反馈的压电片堆式主动非线性吸振器,给出了基础简谐激励和外扰力共同作用下的振动控制效果,可有效提升安全性和经济性[16].
本文基于轨道型非线性吸振器,引入时滞位移反馈控制,提出一种时滞轨道非线性吸振器,并应用于建筑结构的振动抑制.
1 动力学模型
如图1所示,建筑结构质量、刚度、阻尼系数分别为m1,k1,c1,其顶部置放吸振器.吸振器由带有轨道的小车和小球构成,其中m2为小车质量,m3为小球质量,c3为小球与小车间的阻尼系数.轨道小球视为刚体,可沿轨道自由滑动,其轨道形状满足y3(t)=a[x3(t)-x2(t)]4,其中y3为小球的竖向位移,x2和x3分别为小车和小球的水平位移,a为轨道形状系数[8].建筑结构和吸振器间的弹簧刚度系数为k2,阻尼系数为c2.采用时滞位移反馈控制,控制力取为Ax2(t-τ),其中A为反馈增益系数,τ为时滞量.
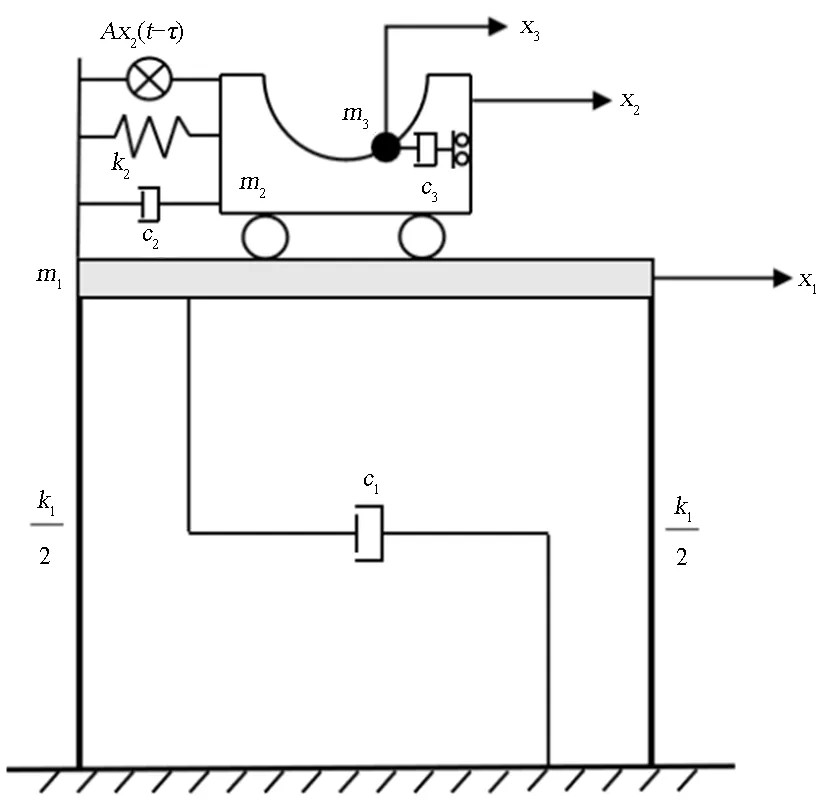
图1 含时滞轨道非线性吸振器的建筑结构Fig.1 A building structure with a nonlinear delayed vibration absorber
系统的总动能T表达式为:
(1)

(2)
根据拉格朗日方程,则有:
(3)
其中,Qi为外激励和控制力;D为耗散函数[17],即
将式(1)和式(2)代入式(3)中,整理后可得:
(4)
系统参数取为:m1=30kg,k1=2×104N/m,c1=0.05Ns/m,m2=3kg,k2=3470N/m,c2=0.6Ns/m,m3=3kg,a=200m-3,c3=0.8Ns/m[7].激励幅值f0分别取为1N和10N,当激励频率ω=23.5rad/s时计算在t=70T内系统响应,其中T为外激励周期.图2为FT,FT1,FT2以及FT3的变化曲线.如图2(a)所示,FT的主要部分为FT1,而FT2和FT3在FT中占比很小.如图2(b)所示,FT2和FT3的影响较大,在FT1,FT2以及FT3的同时作用下,FT在出现了峰值现象,即当相对位移增大到某个值后,FT会随其的增大而减小,这种现象有助于在发生较大响应时减轻由于作用力过大而造成减振设备的损害[7].


图2 不同外激励幅值作用下非线性力的变化曲线Fig.2 The curve of nonlinear force for different excitation amplitudes
2 幅频特性
本文采用谐波平衡法(HBM)求解系统动力学响应[16].为简化起见,引入轨道小球相对轨道小车的位移xn(t)=x3(t)-x2(t).方程可改写为:
(5)

(6)


图3 主系统的位移幅频曲线Fig.3 The amplitude-frequency curve of the primary system
图3为当k2=3470N/m,a=200m-3,f0=10N,A=-80N/m,τ=0.05s时,建筑结构的位移的幅频曲线.为了验证谐波平衡法的准确性,采用龙格库塔法(RKM)进行验证.由图3可知,龙格库塔法与谐波平衡法的结果在稳定周期解的区域基本吻合,说明两种方法的结果相一致.此外,主系统位移幅频曲线的共振峰向左偏转,表现出软弹簧特性.同时,在共振峰附近出现了不稳定的解.
3 参数讨论
采用纯被动控制时,考察吸振器参数对于幅频曲线的影响情况.如图4(a)所示,随着弹簧刚度系数由3700N/m增大到5200N/m,幅频响应曲线向右移动,并且向左偏转的程度有所减弱.此外,在稳定区域内,周期运动的位移振幅的峰值从0.0535m增大到0.0763m,而不稳定区域内的共振峰幅值从0.2039m增大到0.5665m.图4(b)给出了不同轨道形状系数对应的主系统的幅频曲线.当时,吸振器退化为线性情形.当时,系统的幅频曲线向左偏转,


图4 不同弹簧刚度系数k2与轨道形状系数a时,主系统的位移幅频曲线Fig.4 Effects of the spring stiffness k2 and the coefficient of track shape a on the amplitude-frequency curve of the primary system
共振峰附近也出现了不稳定解.随着轨道形状系数的增大,幅频曲线向左偏转的程度也增大.
下面考察位移反馈控制,首先考虑无时滞情形.系统的弹簧刚度系数k2与轨道形状系数a分别取为3470N/m和200m-3,其他参数保持不变.如图5所示,反馈增益的值从零变为-500N/m时,稳定周期运动振幅的峰值分别为:0.0477m,0.0431m,0.0379m,0.0387m,0.0347m.不稳定的共振峰幅值从0.1658m降低到0.1000m.与无反馈控制相比,受控系统的稳定周期运动的幅值的峰值与不稳定区域的共振峰幅值都有所降低.
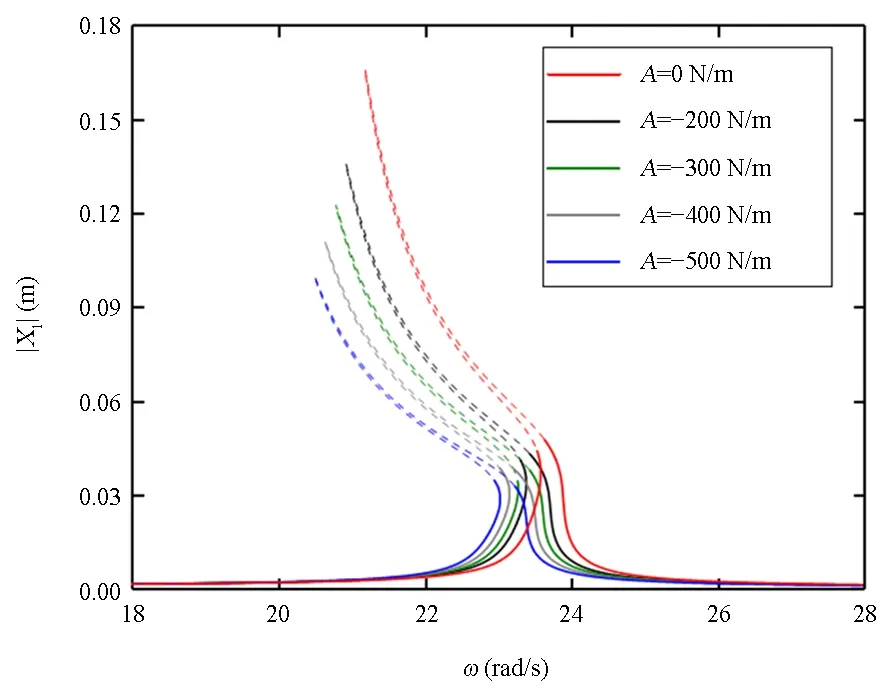
图5 不同反馈增益A 的主系统位移幅频曲线Fig.5 Effects of the feedback gain A on the amplitude-frequency curve of the primary system

图6 不同时滞下的主系统位移幅频曲线Fig.6 Effects of the time delay on the amplitude-frequency curve of the primary system
考虑控制中的时滞效应,而其余系统参数保持不变.图6给出了不同时滞量情形下主系统的位移幅频曲线,其中.如图6所示,无时滞时,幅频曲线的共振峰表现出向左偏转特性,并且在共振峰附近出现不稳定区域.当τ=0.01s时,共振峰基本不偏转,不稳定区域消失,类似于线性情形.此时,共振峰的幅值降至0.0230m.随着时滞量的继续增大,幅频曲线的峰值进一步降低,并与龙格库塔法的计算结果基本吻合.这说明,引入时滞可以消除幅频响应曲线中的不稳定区域,减弱系统的软弹簧特性,并可提高振动抑制效果.
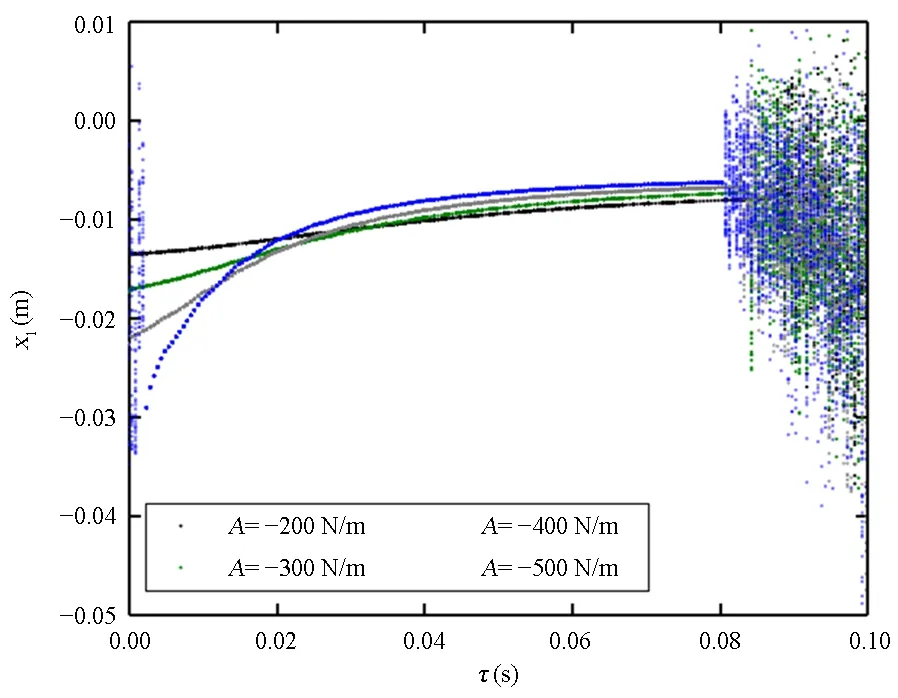
图7 主系统位移随时滞量变化的分叉图Fig.7 The bifurcation diagram of the displacement of the primary structure with the change of time delay

图8 在主结构位移随外激励幅值变化的分叉图Fig.8 The bifurcation diagram of the displacement of the primary system as the excitation amplitude varies


4 结论
本文提出了一种时滞轨道非线性吸振器,并将其安装在建筑结构顶部.通过谐波平衡法结合弧长延拓法给出了幅频响应曲线,并与龙格库塔法的结果进行了对比验证.结果表明,系统的幅频响应曲线共振峰会出现向左偏转现象,并且共振峰附近存在不稳定区域.在被动控制时,轨道非线性造成了幅频曲线共振峰附近的软弹簧特性与不稳定性.考虑时滞反馈控制后,可消除幅频曲线中的不稳定区域,降低甚至消除共振峰的软弹簧特性,并能够降低共振峰的幅值.此外,时滞反馈控制还可有效调控复杂运动,改善振动抑制效果.
