基于能量整形方案实现具有通讯时滞欠驱动Euler-Lagrange网络的一致性*
2023-11-18郑斌苗中华周进
郑斌 苗中华 周进,2†
(1. 上海大学 上海市应用数学和力学研究所, 力学与工程科学学院, 上海 200072)
(2. 上海飞行器力学与控制研究院,上海 200092)
(3. 上海大学 机电工程与自动化学院, 上海 200072)
引言
近十年多来,网络化Euler-Lagrange (EL)系统的合作行为与协调控制, 作为一类具有代表性的多智能体系统,它的分布式同步和一致性控制已经成为包括动力学与控制等许多领域备受瞩目的热点课题之一[1-5]. 这主要是由于EL动力学能够描述包括机器人操纵机械臂,自主车辆和无人航天器等无数的物理和力学对象,尤其是在大规模的集成化的生产过程中,在灵活性、并行性、可操作性和可拓展性方面表现出潜在而又独有的优点. 一般来说,多个机器人的合作行为与协调控制从理论上可以归结为网络化EL系统的同步和一致性问题,现有大量同步和一致性问题的研究主要集中在EL网络在无引导者和有引导者-跟随者的两种情形[6-14].
虽然近年来许多学者对于网络化EL系统提出和发展了大量的同步和一致性协议和算法,但这些结果大多涉及到完全驱动的EL动力学系统. 然而在实际工程应用中,如协作的柔性机械臂系统,航天器的姿态同步,水下探测的机器人都是典型的欠驱动EL系统,由于其控制输入的数量严格小于系统自由度(DOF). 同时网络化欠驱动EL系统是一个涉及多重动力学高度非线性和强耦合的复杂动态系统,尤其是考虑到当网络中涉及不同个体之间的信息交互时,使得对网络化欠驱动EL系统协同控制方案的设计相对于完全驱动EL系统更为复杂并具有挑战性. 因此,近年来一些学者致力于研究不同类型欠驱动EL系统的同步和一致性问题[15-19]. 例如,Nuo等[16]提出了一类比例加阻尼的控制器实现了非恒同欠驱动EL网络渐近地达到一致性. Ortega等[19]通过坐标变换,在不需要知道初始条件情况下来解决通信渠道存在未知延迟的一致性问题.
能量整形技术是一种基于无源控制(PBC)结构的有效方案,近年来已被广泛用于处理大量各种复杂互联结构模式的物理和机械系统的动力学与控制问题. 这个控制方案的基本思想可以追溯到早期的开创性工作[20],其核心是整合系统各个部分能量和控制器能量作为一个系统的总能量,它被用来构造作为一个合适的Lyapunov函数,并进一步通过阻尼注入来确保整个闭环控制系统的稳定性. 能量整形另一个重要的特征是它不需要速度测量,从而可以避免速度传感器装置在实际应用中的不精确性甚至失效. 近来,Nuo等[21]应用能量整形和阻尼注入控制方案,提出了一种分散式控制协议用于求解完全驱动EL网络在无引导者和有引导者两种情形下的一致性问题. Cruz-Zavala等[22]利用基于PBC结构的能量整形技术,给出了完全驱动EL系统在有限时间内达到一致性的算法. 另一方面,由于涉及诸如个体间直接或间接相互作用,网络化控制系统(NCS)中传感、通讯、计算与执行等环节不可避免地存在时滞效应[23]. 其中通讯时滞是影响协作机器人之间信息交互的关键因素之一,它通常是由传输信号延迟、信道噪声、量化误差等网络环境的不确定性随机因素引起的,它能极大影响NCS的性能甚至最终改变系统的稳定性[16,22]. 然而,目前尚未见到利用能量整形方案来实现具有通讯时滞欠驱动EL网络的一致性问题. 因此,无论从理论上还是从工程应用背景来看,这是一个极其重要而不可缺少的挑战性的研究问题.
本文的主要目的是利用能量整形方案无源控制的技术特征,来研究由欠驱动EL动力学所描述网络化柔性机械臂系统一致性跟踪控制问题. 通过结合互连分配加上阻尼注入策略,将具有通讯时滞EL网络欠驱动和驱动部分,以及控制器三部分能量有机地整合一个总的系统能量,从而使得导出的一致性协议能够确保网络化欠驱动EL系统达到无引导者和有引导者-追随者两种情形下所期望的跟踪一致性问题. 所获得的一致性协议是充足分布式的,同时也不需要速度测量,因而它能很方便地应用于实际中协作的网络化机器人系统.
本文的组织结构具体如下:第1节介绍一些相关符号、图论知识和网络化欠驱动EL系统动力学模型. 第2节介绍了本文的主要结果,分别在无引导者和有引导者-跟随者的情况下,讨论具有通讯时滞欠驱动EL网络的一致性问题. 第3节通过数值仿真验证所提出控制算法有效性,并分析通讯时滞对一致性的效应. 第4节最后对本文给出一个简短的总结.
1 问题描述
1.1 预备知识
1.2 图论
在本文中,如图1所示,所考虑的机器人个体通过一个有向拓扑图(或有向连通网络)交换信息,每个机器人可以被视为图的一个节点,假设机器人i通过有向路径获得机器人j的信息,那么aij=1,否则aij=0.一般来说与邻接矩阵A=(aij)∈N×N相关的有向图的拉普拉斯矩阵L=(lij)∈N×N定义为:和lii=-aij,i≠j.易知lij≤0,i≠j,以及一棵有向生成树是由个节点组成的网络,其中一个节点称为根节点,它有一条通往其他每个节点的有向路径. 关于图的相关知识可以在在文献[24,25]中找到.
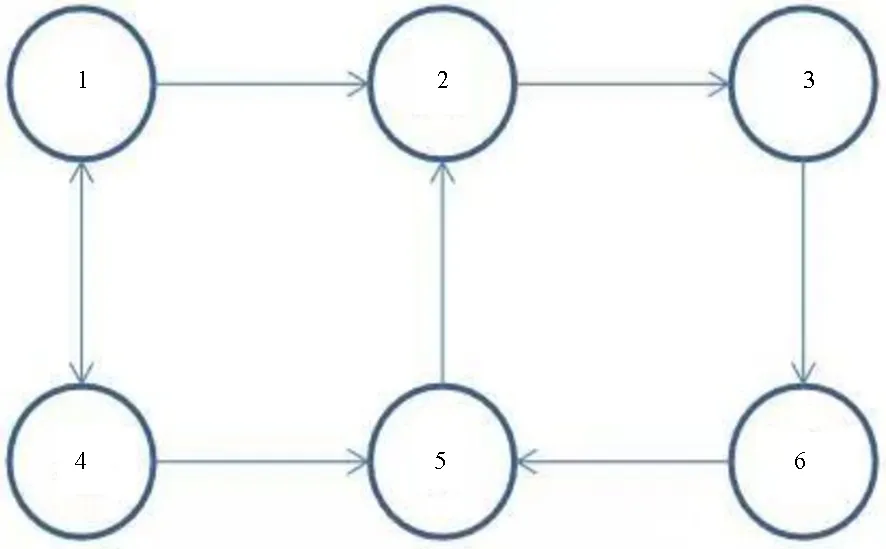
图1 有向网络通讯拓扑Fig.1 Directed network communication topology
1.3 网络化欠驱动EL系统
考虑由N个柔性机械臂系统构成的网络化欠驱动EL系统, 其中第i个个体的欠驱动EL动力学可由如下方程表示:
Ki(qi-xi)=0n
(1)
其中i=1,2,…,N,qi∈n是连杆角度位置,xi∈n是电机(关节)角度位置.Mi(qi)∈n×n是对称正定的惯性矩阵,n为科氏力和离心力,gi(qi)∈n×n是重力矩,Ji∈n×n是电机转子的转动惯量,Ki∈n×n为柔性关节刚度系数,τi∈n是电机受到的驱动力矩.
通过借助于文献[25],我们可以定义新的变量变换:
(2)
相应地可以设计出以下形式的控制器:
(3)

通过利用方程(2)和(3),欠驱动EL网络(1)可以被约化为:
Ki(qi-yi)=0n
(4)
一般地,欠驱动EL系统(1)具有以下性质[24,25]:
为了研究网络化欠驱动EL系统分布式控制方案的设计,以下给出在无引导者和有引导者-跟随者两种情形下一致性定义如下:
定义1:考虑由N个非恒同柔性机械臂系统构成的欠驱动EL网络(1),通过使用分布式控制器τi∈n,使得相应的连杆角度位置qi将渐近地趋于一个共同常值. 也就是说存在一个常数向量qc∈n,对于所有i∈[1,N],有以下结论成立:
(5)
定义2:考虑由N个非恒同柔性机械臂系统构成的欠驱动EL网络(1),通过使用分布式控制器τi∈,使得相应的连杆角度位置将渐近地趋于一个期望常值ql∈n,同时需要至少有一个个体可以直接获取引导者的位置信息ql,这样对于所有i∈[1,N],有以下结论成立:
(6)
基于文献[21],约化系统(4)中有如下能量函数:
(7)

相应的动能函数定义为:
(8)
和势能函数的定义为:
(9)
我们注意到sT是正定的,对于欠驱动EL系统,我们可以有
(10)
2 主要结果
2.1 无引导者的情形
首先,让控制器的广义坐标定义为θ∈Nn,通过应用EL系统的运动方程,我们可以相应得到反映控制器动力学特征的方程

(11)
和相应地总能量函数:
(12)

为了方便后面的计算,我们选择Mc=INn,控制器的势能函数为
(13)
其中H=diag(hiIn),是一个Nn×Nn的弹簧刚度系数矩阵,这里hi>0.B=diag(bi)是一个N×N的增益矩阵,其中bi>0.
接下来,我们将对欠驱动EL网络(1)的约化系统(4)设计控制信号如下
(14)
由于网络中机器人个体之间存在通讯时滞的信息交互,考虑如下控制器动力学方程
(15)
这里假定从第i个个体到第j个个体的通信交互存在着一个可变的时间延迟Tji(t),进一步假设0≤Tji(t)≤*Tji<∞成立.
因此,对网络化欠驱动EL系统(1)的驱动部分所施加的控制输入具有以下形式:
(16)
为了方便地得出网络化欠驱动EL系统分布一致性的主要结果,我们引进如下引理:
引理1[16]: 对于任何矢量信号α,β,任何可变时间延迟0≤T(t)≤*T<∞和任意常数c,有

(17)
定理1:对于网络化的欠驱动EL系统(1),通过选择控制输入(16),只要注入阻尼满足以下条件
(18)
则在能量整形加阻尼注入的无源控制方案下,能够实现如定义1所述无引导者情形下的一致性问题.
证明:考虑到如下的Lyapunov函数:

(19)
结合利用上述性质1,2,容易求得的导数:
θj[t-Tji(t)]}}
(20)
因为
(21)
综合以上,我们可以得出:
(22)
同时对(22)进行积分
V1(t)-V1(0)=
(23)
因为V1(t)≥0和根据引理1:
(24)


现在对公式(15)进行微分可以得到:
(25)
接下来的证明主要分为以下两个部分:第一是证明控制器的广义坐标θ收敛于一个共同常值;第二是证明变量y收敛于控制器的广义坐标和最终证明变量收敛于连杆角度位置.


2.2 有引导者-跟随者的情形
这节来讨论有引导者-跟随者情形的一致性,在讨论之前先介绍一个引理.
引理2:[21]考虑对角矩阵是一个矩阵R=diag(ri)是一个N×N矩阵,假设至少有一个元素是严格的正数,即ri>0,那么矩阵Ll=L+R是对称正定的并且是满秩的.
与无引导者一致性问题的情况不同,我们选择上述对角矩阵R=diag(ri)来建立引导者-跟随者的互连关系.当引导者可以发出信息到第i个跟随者时,ri>0,否则ri=0,即存在至少一条从引导者到任何N个跟随者的有向边.

(26)

(27)
所以,最终导出的控制输入为以下形式:
(28)
定理2:对于网络化的欠驱动EL系统(1),通过选择上述控制输入(28),只要注入阻尼满足条件 (18),则在能量整形加阻尼注入的无源控制方案下,能够实现如定义2所述有引导者-跟随者情形下的一致性问题.
证明:考虑到如下的Lyapunov函数:
(29)
结合上述性质1,2,很容易得到V2的导数:
(30)

(31)
同样利用有向图拉普拉斯矩阵的性质上述公式(31)可以表述为:
(32)
又因为

(33)
那么
(34)
3 数值模拟
本节通过数值模拟来验证上述基于能量整形方案提出的分布式一致性协议的正确性和有效性.如图2所示,给出了柔性关节的示意图. 这里选取5个柔性机械臂系统构成欠驱动EL网络[如图3(a)所示],第i(i=1,2,…,5)个欠驱动EL系统的

图2 柔性关节模型Fig.2 Flexible-joint model
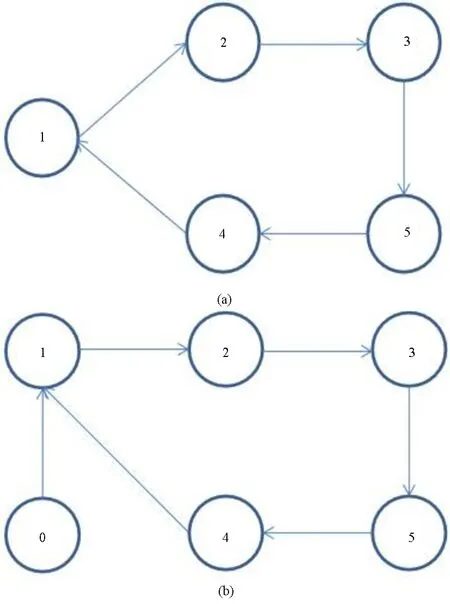
图3 网络通讯拓扑G1和G2Fig.3 Network Communication Topology G1 and G2
qi=[qii,qi2]T,xi=[xii,xi2]T
从图3(a)可以得出Laplacian矩阵为
根据定理1,我们所设计的控制输入的参数选取hi=60,di=10,bi=5,不难验证它们是满足本文的假设和定理1的条件. 在这节中我们分别选取5个欠驱动EL系统初始位置
q1(0)=[4.0,3.6]T,q2(0)=[5.1,4.8]T,
q3(0)=[3.3,3.1]T,q4(0)=[4.6,4.2]T,
q5(0)=[5.4,5.1]T,x1(0)=[4.4,3.8]T,
x2(0)=[5.4,5.7]T,x3(0)=[3.6,4.1]T,
x4(0)=[4.9,5.2]T.
5个欠驱动的EL系统初始速度分别选择如下:
在网络通讯拓扑G1下,考虑不同大小的通讯时滞Tji(t)=0,0.1+0.01cost,1+0.01cost,图4、图6和图8描述了在上述不同通讯时滞下,连杆位置的变化状态. 图5、图7和图9分别描述了当时滞Tji(t)=0,0.1+0.01cost,1+0.01cost时,控制器的广义坐标θ的变化状态. 此外,比较上述6个图,不难看出,随着通讯延迟的增加,5个欠驱动EL系统达到一致性状态的时间变长. 因此可以得到以下结论:机器人个体之间的通讯时滞可以降低网络一致性的协同性能,较大的通讯时滞能够减缓达到一致性的进程, 但并不影响系统一致性的稳定性,这也证实了所提出的控制算法的正确性和有效性. 另外,当d=0不满足定理的条件时,连杆位置q的变化状态如图10所示,5个欠驱动EL系统没有达到一致性. 这一模拟结果与定理1是一致的.


图4 当Tji(t)=0时,连杆位置q在时间t=0s~40s的变化状态Fig.4 When Tji(t)=0, the state of change of the link angular position q at time t=0s~40s

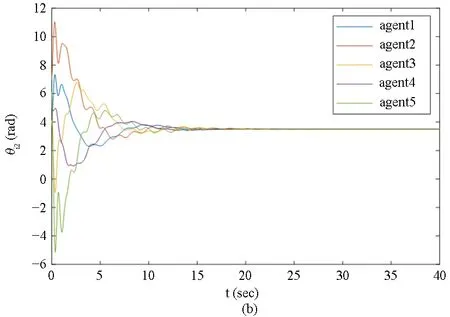
图5 当Tji(t)=0时,控制器的广义坐标θ在时间t=0s~40s内的变化状态Fig.5 When Tji(t)=0, the state of change of the generalized coordinate of the controller θ at time t=0s~40s
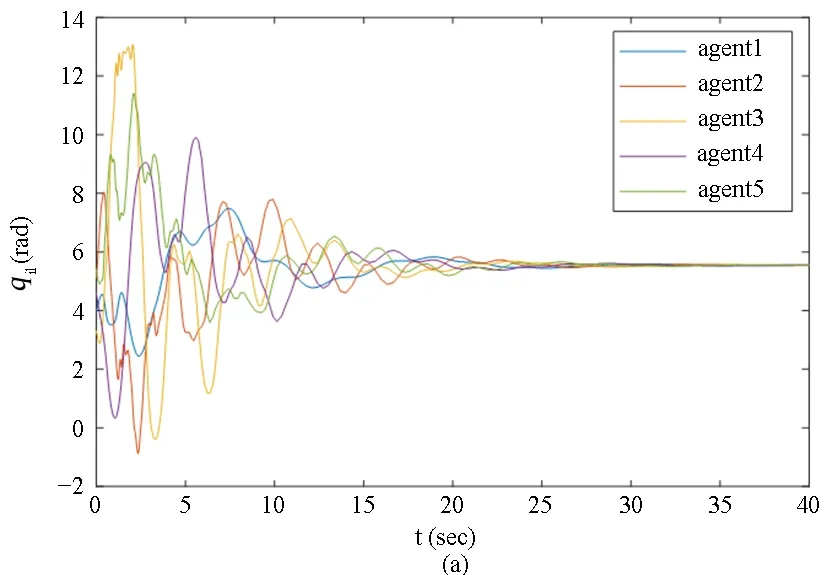

图6 当Tji(t)=0.1+0.01cos(t)时,连杆位置q在时间t=0s~40s的变化状态Fig.6 When Tji(t)=0.1+0.01cos(t), the state of change of the link angular position q at time t=0s~40s
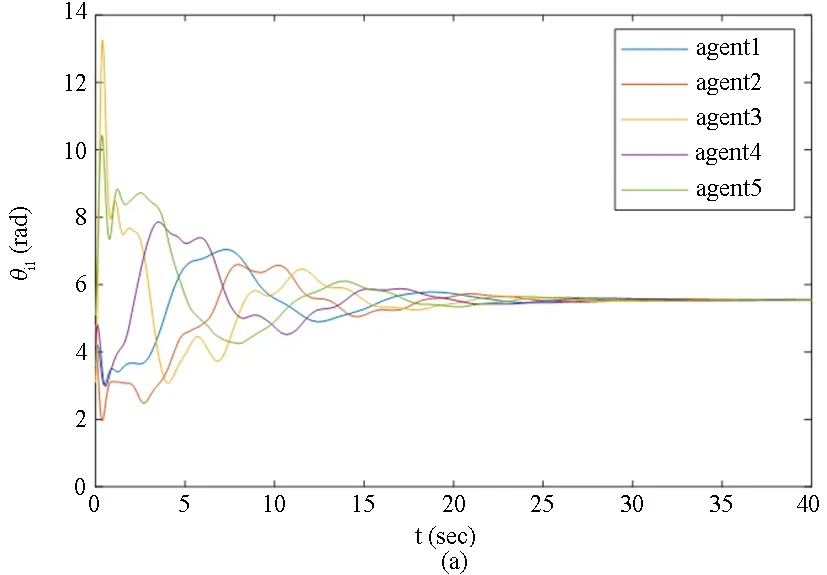
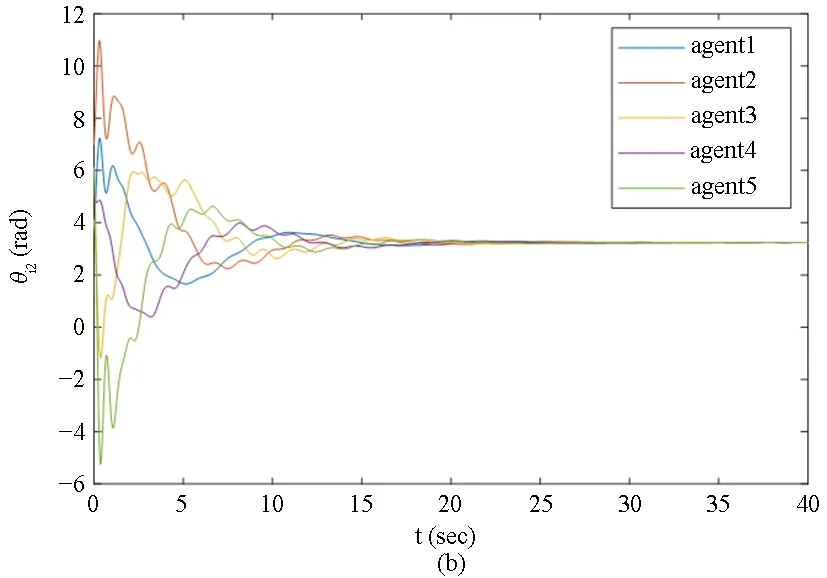
图7 当Tji(t)=0.1+0.01cos(t)时,控制器的广义坐标θ在时间t=0s~40s内的变化状态Fig.7 When Tji(t)=0.1+0.01cos(t), the state of change of the generalized coordinate of the controller θ at time t=0s~40s
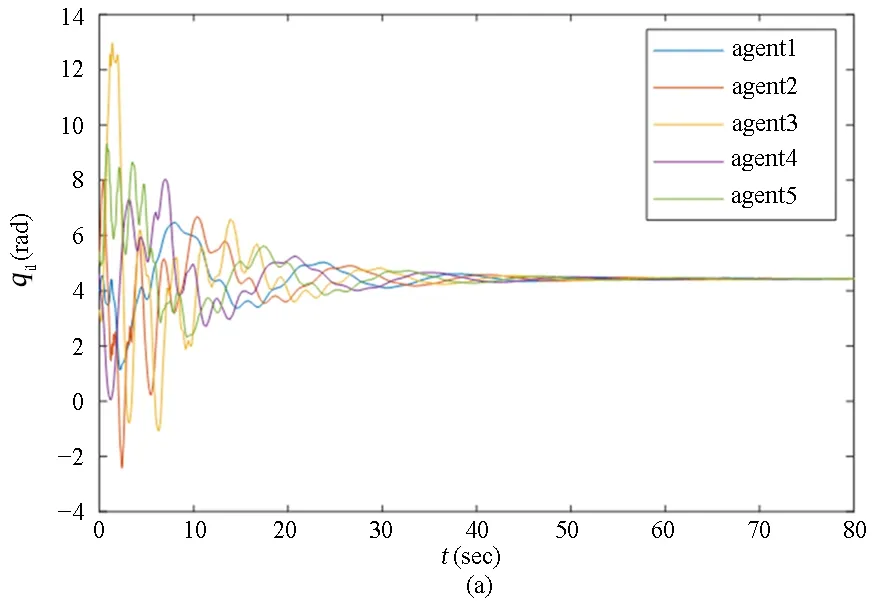

图8 当Tji(t)=1+0.01cos(t)时,连杆位置q在时间t=0s~80s的变化状态Fig.8 When Tji(t)=1+0.01cos(t), the state of change of the link angular position q at time t=0s~80s
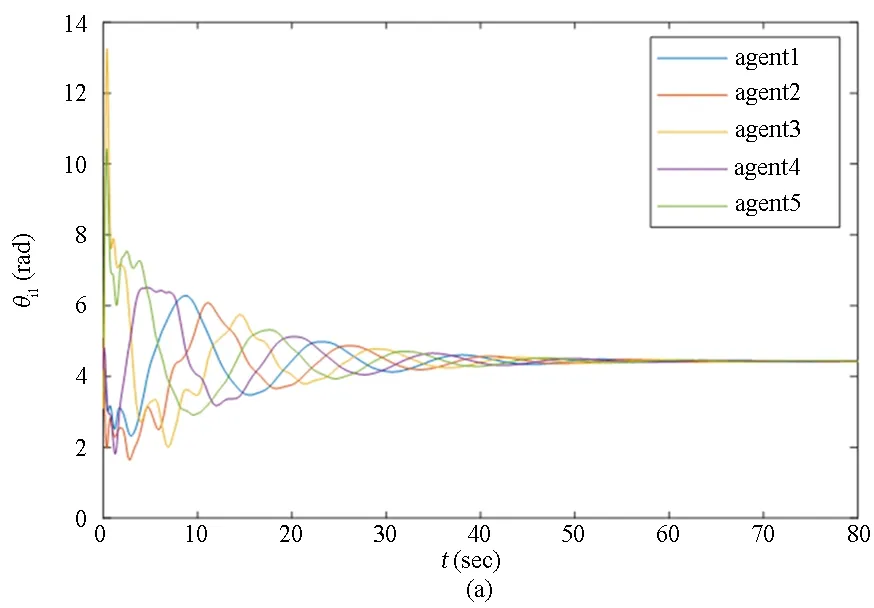
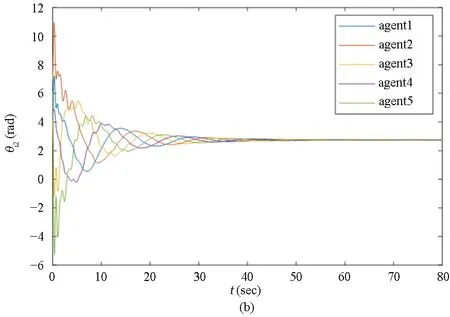
图9 当Tji(t)=1+0.01cos(t)时,控制器的广义坐标θ在时间t=0s~80s内的变化状态Fig.9 When Tji(t)=1+0.01cos(t), the state of change of the generalized coordinate of the controller θ at time t=0s~80s


图10 当Tji(t)=0.1+0.01cos(t),d=0时,连杆位置q不能达到一致性Fig.10 When Tji(t)=0.1+0.01cos(t),d=0, the link angular position q can not achieve consensus
在图3(a)的基础上,我们让引导者(标记为0)的信息只传输给机器人个体1,通信拓扑结构如图3(b)所示. 选取hi=60,di=10,bi=5和ri=6,虚拟引导者的位置为ql=[1,-1]T,其它的初始条件和系统的物理参数一样.


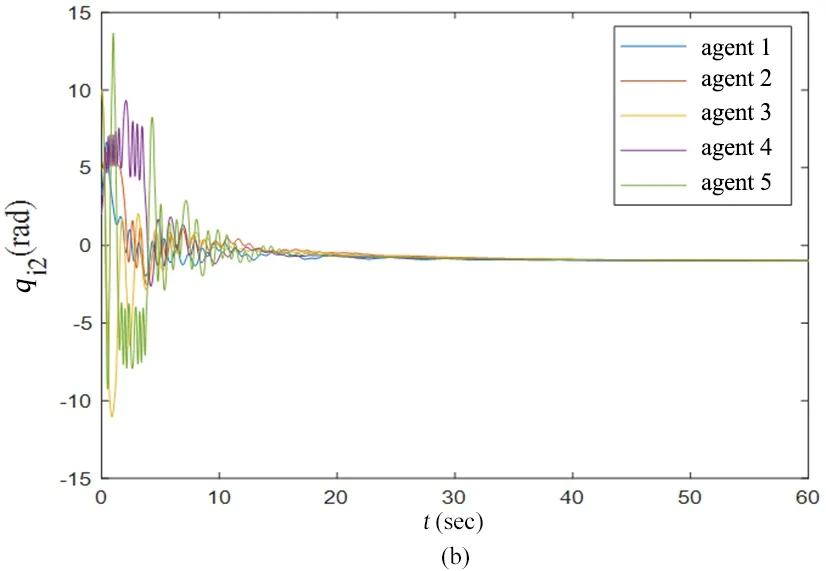
图11 当Tji(t)=0.1+0.01cos(t)时,连杆位置q在时间t=0s~60s的变化状态Fig.11 When Tji(t)=0.1+0.01cos(t), the state of change of the link angular position q at time t=0s~80s

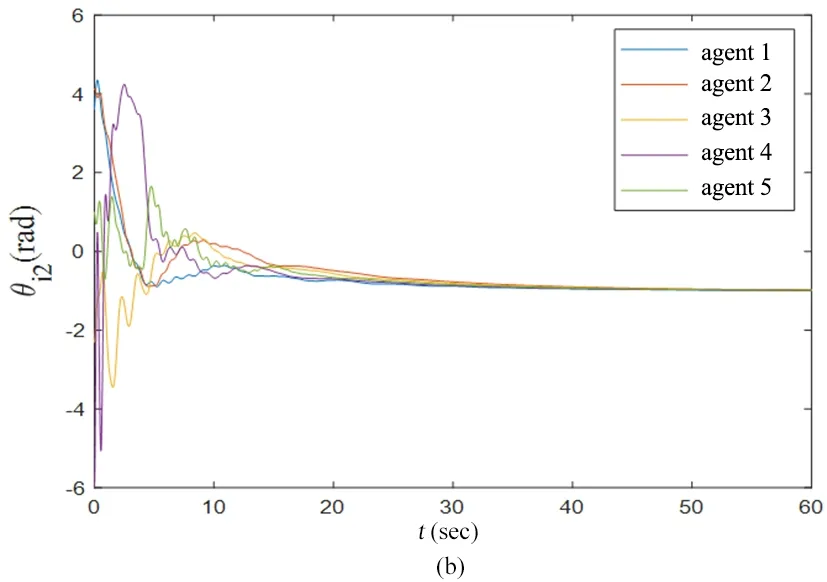
图12 当Tji(t)=0.1+0.01cos(t)时,控制器的广义坐标θ在时间t=0s~60s内的变化状态Fig.12 When Tji(t)=0.1+0.01cos(t), the state of change of the generalized coordinate of the controller θ at time t=0s~60s
4 结论
本文在无引导者和有引导者-跟随者的两种情况下,通过充分利用能量整形方案无源控制的特征,将具有通讯时滞EL网络欠驱动和驱动部分以及控制器三部分能量有机地整合一个总的系统能量,这个总能量被选择作为一个合适的Lyapunov函数,使得该分布式协议能够确保网络化欠驱动EL系统实现所期望的跟踪一致性. 它是充足分布式的同时也不需要速度测量,因而它将很方便地应用于实际工程中网络化机器人的控制与协作. 最后,以欠驱动EL网络的数值模拟来验证理论算法的有效性同时分析不同通讯时滞对一致性性能的影响.
