基于气囊结构鞋垫的足底压力分布测量系统
2023-11-15沈进东陆益民穆景颂
陈 伟,王 勇,沈进东,陆益民,穆景颂
(合肥工业大学 机械工程学院,合肥 230009)
0 引言
人体足底压力分布能反映足部的结构、功能及整个身体姿势控制的情况,是重要的生物力学信息。足底压力测量在足部疾病诊断、步态研究、康复训练指导与评估等方面也有重要意义[1]。通常,足部病变畸形或身体控制功能异常的人,其足底压力分布情况会受到足部病变的影响[2]。Meyring等[3]测量了偏瘫病人的动态足底压力,并与正常人的动态足底压力数据进行对比,对偏瘫病人的病况评估和治疗提供指导。在Ⅱ型糖尿病治疗中,糖尿病神经病变会导致足部灵敏度下降,使得足底压力分布处于异常状态,最终引发足部溃疡[4-5]。因此,通过足底压力的分布特征可以及时发现和矫正病况,降低足部溃疡发生的风险。在足部溃疡治疗期,也可以通过监测足底压力数据来防止病情恶化[6]。足底压力分布特征还可应用于稳定性和平衡能力的评估,帮助治疗中风患者[7-8]。除此之外,足底压力测量对于义肢设计也有重要作用,通过足底压力数据研究和步态特征分析,以及义肢使用患者的行走步态和足底压力的测量分析可以完善义肢功能,帮助患者尽快恢复行走能力[9]。进入20世纪后,足底压力测量技术开始快速发展,形成了许多测量的基本方法,如足印技术、直接形象化技术、力板测试技术、多负载单元测试技术、压力鞋与压力鞋垫技术[10-11]。目前,足底压力分布测量技术被广泛应用于测力板、测力台以及压力鞋垫[12]。结合国内外关于足底压力测量系统的研究可以发现,足底压力分布测量的主流方式就是测力板/测力台、基于薄膜传感器阵列的足底压力测量鞋垫[13]。虽然足底压力分布测量系统正在发展和完善,但仍存在不足:测力板/测力台操作麻烦且对使用场所要求高,多传感器布置导致成本大,只适用于大型医院或企业。基于薄膜传感器阵列的足底压力测量鞋垫可弥补测力板/测力台的部分不足,但压电薄膜传感器的主要材料是聚偏氟乙烯(polyvinylidene fluoride,PVDF),这种材料耐磨性差、使用寿命短,多信号高速开关电路会导致系统迟滞性高[14-16]。基于人体行走的步态特征、足内外翻和足底压力的特征,本文中对气囊鞋垫进行了分区,并采用半球壳结构的硅胶材料气囊单元体提高穿戴的舒适性,具有成本低、可靠性高、寿命长等特性。测量系统通过传感器测量气囊鞋垫内气压变化,可以较高精度地测量出静态站立过程中足底压力的分布情况,并可用于平衡能力和平足问题的检测。此外,根据足底压力各测量区域的压力变化趋势,还可实现对直线行走、上楼和下楼过程中步态阶段的划分,为后续足底压力在康复训练、平衡能力评估等应用提供参考。
1 足底压力分布测量区域划分
1.1 足部结构
人的足部组成十分复杂,包括26块骨头、33个关节、20多条肌肉和100多条韧带[17]。足部不仅支撑整个身体的重量,还具有缓冲和吸收冲击力、调节身体平衡的作用。但足底并不完全与地面接触,所以整个足底各部位的压力分布并不是均匀的。根据人体解剖学,足部骨骼主要有趾骨、跖骨、跗骨3个大群。趾骨群共有14块骨头,除大脚趾有2根趾骨,其他4根脚趾均由3根趾骨组成。跖骨群由5根较长的骨头组成。跗骨群最为复杂,它分为前、中、后3列,共有7块骨头,其中前列包括内、中、外3块楔骨和骰骨,中列仅有1根足舟骨,后列包括距骨和根骨,距骨在上、根骨在下[18]。
1.2 步态特征
人在运动过程中,双臂和双腿的摆动一般具有周期性,从整个步态的周期分析来看,人在行走过程中至少有一只脚是在支撑身体,且具有左右对称性[19-20]。在单撑阶段,另一只腿处于摆动阶段,摆动阶段结束的标志是脚跟触地,而摆动阶段开始的标志是脚尖离地。从足底的受力情况来看,行走过程中人体足部的足跟位置、前脚掌、还有脚趾3个位置为主要受力位置,足底压力中心在足跟和脚趾之间的连线上移动。
1.3 足底区域划分
根据人体行走的步态特征、足内外翻和足底压力特征,将气囊鞋垫划分为趾骨区、内跖骨区、外跖骨区、足弓区和足跟区[21],具体划分方式:将由足跟开始的足长30%划分为足跟区;从足跟区开始的足长30%划分为足弓区,足弓区划分不仅有助于准确测量足底压力分布,还可以通过足弓处的受力情况判断足部是否存在平足问题;从足弓区开始的足长25%划分为跖骨区,跖骨区又由足内侧到足外侧按照约1∶1的比例划分为内跖骨区和外跖骨区,分别对应第1—2跖骨和第3—5跖骨,可用于测量人体在站立或运动过程中的足内翻和足外翻现象;最后足长的15%为趾骨区,趾骨区的受力情况在检测人体平衡和异常步态中发挥着重要作用。左脚的足底分区如图1所示。
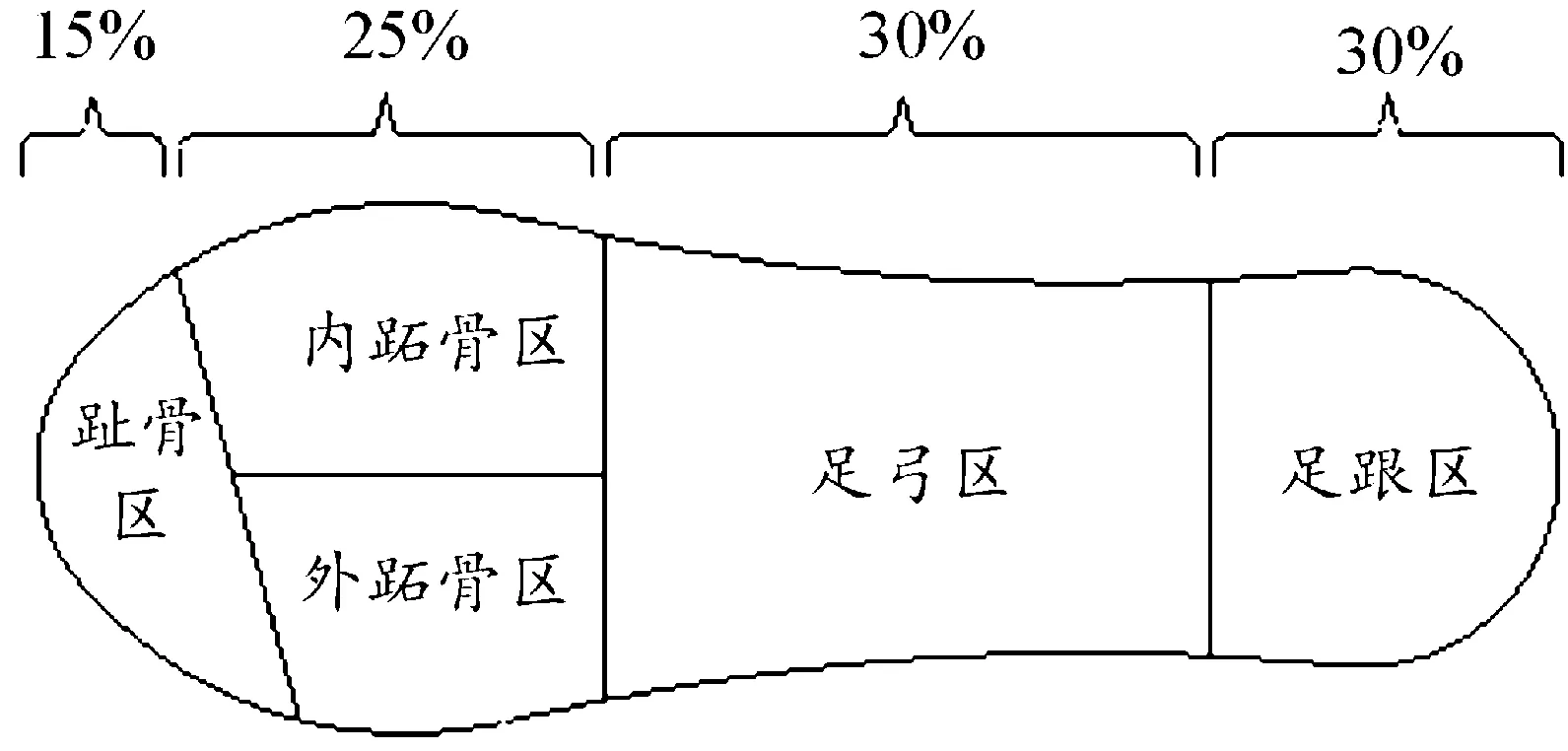
图1 足底分区示意图(左脚)
2 气囊单元体的设计与仿真分析
2.1 气囊单元体设计
考虑到足底压力测量系统与足部接触的舒适性,结合现有硅胶运动鞋垫的半球面结构,采用空腔半球面结构的气囊单元体设计一种气囊式足底压力分布测量系统,由气囊单元体腔内气压的变化实现外部载荷测量。为保证足底压力分布测量系统的灵敏度,要求气囊单元体具有良好的弹性变形。参考市面硅胶鞋垫,确定气囊单元体的整体结构如图2所示。其中,厚度h决定单元体变形程度,会影响测量系统的灵敏度。
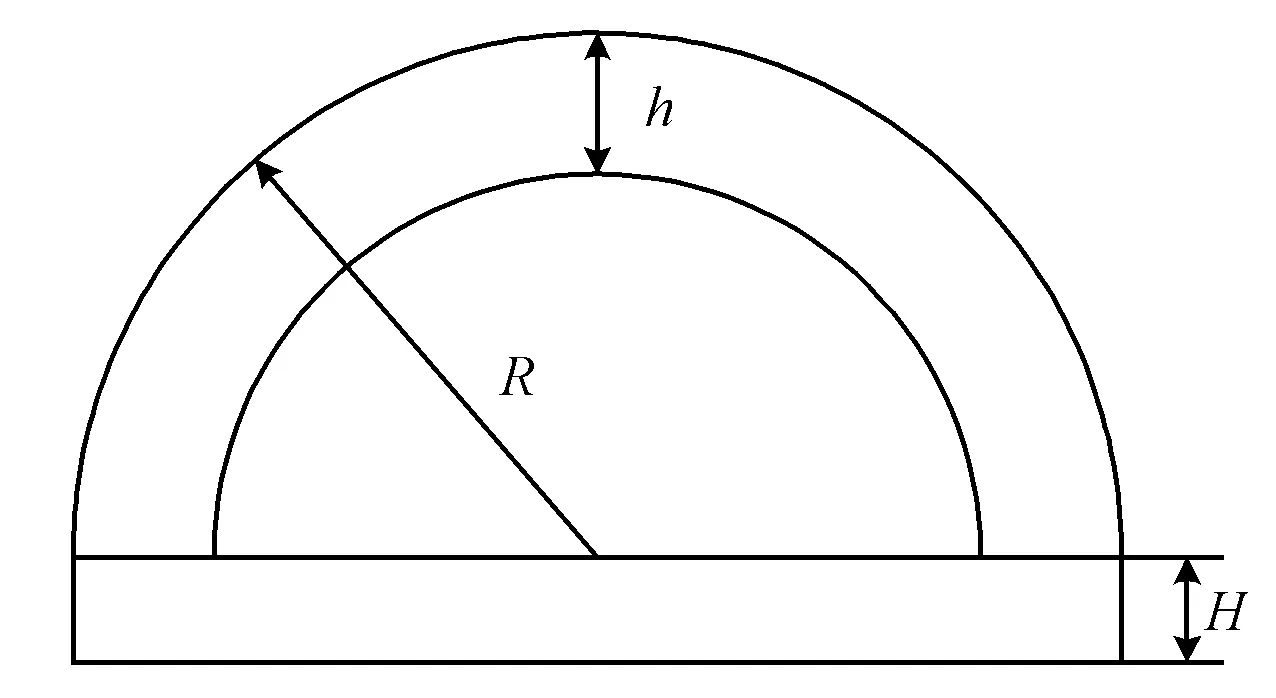
图2 气囊单元体整体结构
2.2 有限元仿真分析
为研究不同厚度气囊单元体对测量系统灵敏度的影响,采用硅胶的三阶Yeoh模型[22-23]进行静力学有限元分析(C10=110.64 kPa,C20=5.82 kPa,C30=-0.09 kPa,D1=D2=D3=0 kPa)。结合足底分区和整个鞋垫的尺寸,选用气囊单元体的外径R=4 mm,H=1 mm。考虑到测量系统的灵敏度和气囊单元体承受较大的外部载荷,对厚度h分别为1.4、1.0、0.6 mm的气囊单元体模型进行有限元仿真,结果如图3所示。
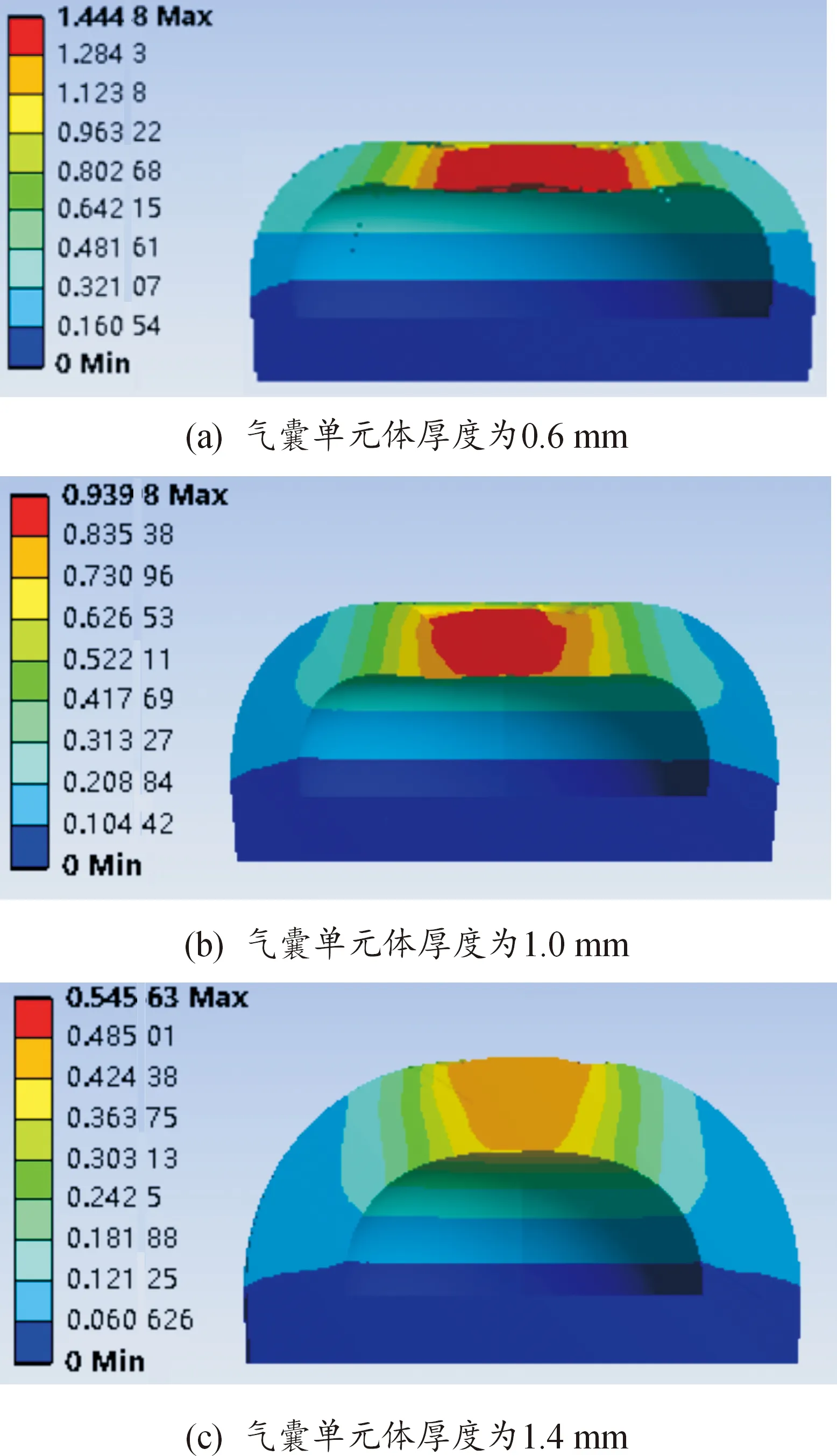
图3 气囊单元体仿真结果
用薄板模拟足底与气囊接触,在薄板的上表面施加压强来模拟体质量70 kg成年人的足底压力,因此分别在3种厚度气囊单元体的薄板上施加17 kPa的载荷。
从图3可以看出,厚度为0.6 mm的气囊单元体最大变形量达到1.445 mm,能够获得更好的测量灵敏度和分辨率,但易受破坏导致使用寿命降低;厚度为1.4 mm的气囊单元体变形量较小,会降低系统灵敏度和分辨率。因此,测量系统最佳选择应为厚度1.0 mm的气囊单元体,以获得更好的测量范围、灵敏度和分辨率。
2.3 迭代方法
为研究气囊单元体内部压强和外部载荷的关系,提出一种较为简单的迭代方法来简化计算。具体方法如下:
步骤1首先在薄板上施加1 kPa的压强,将变形后的气囊单元体模型通过ANSYS SpaceClaim进行修复导出,并利用SolidWorks计算出变形后的气囊单元体内部空腔体积,从而计算出 气囊单元体内部产生的压强。
步骤2由于气囊单元体在1 kPa的外部压强作用下产生的变形会引起内部压强的变化,故将上步计算得出的气囊单元体内部压强施加到气囊单元体内壁,在不改变外部载荷的同时进行二次仿真,从而得出外部载荷为1 kPa时修正后的气囊单元体内部压强。
步骤3通过分析设置的步数控制,在第1步外部载荷为1 kPa的基础上添加第2步,并设置第2步结束时的外部载荷为2 kPa,保持步骤2的内部压强不变,即可仿真得出外部载荷为2 kPa时的内部压强;类比步骤2,将内部气压修正为+,即可得出外部载荷为2 kPa时修正后的气囊单元体内部压强。
步骤4以此类推,可逐步迭代得出外部载荷与气囊单元体内部气压之间的关系,迭代至外部载荷为20 kPa,并仿真数据进行线性拟合,结果如图4所示。
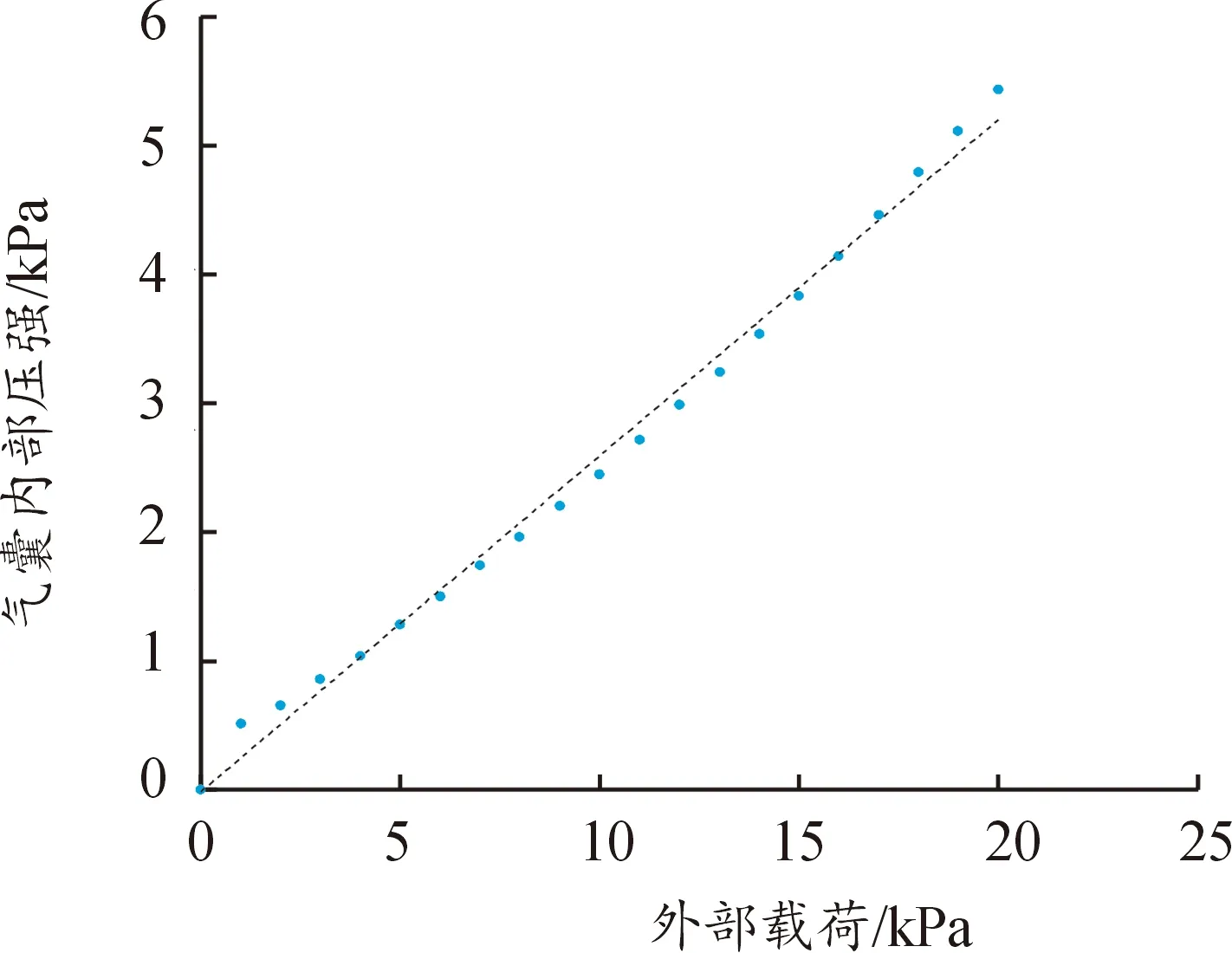
图4 外部载荷与内部气压的关系曲线
通过图4可以看出,气囊单元体外部载荷与内部压强具有较好的线性关系。考虑到加工工艺和测量区域的气囊单元体承载能力,本文的气囊鞋垫采用气囊阵列结构。
2.4 气囊整列实验
有限元仿真结果表明气囊单元体外部载荷与内部压强呈线性关系,本节进一步研究气囊阵列的外部载荷与内部气压的关系。根据划分的足底压力分布测量区域特点,将跖骨区、内跖骨区和外跖骨区、足弓区和足跟区分别简化为3×4、4×8、7×10的气囊阵列,如图5所示。
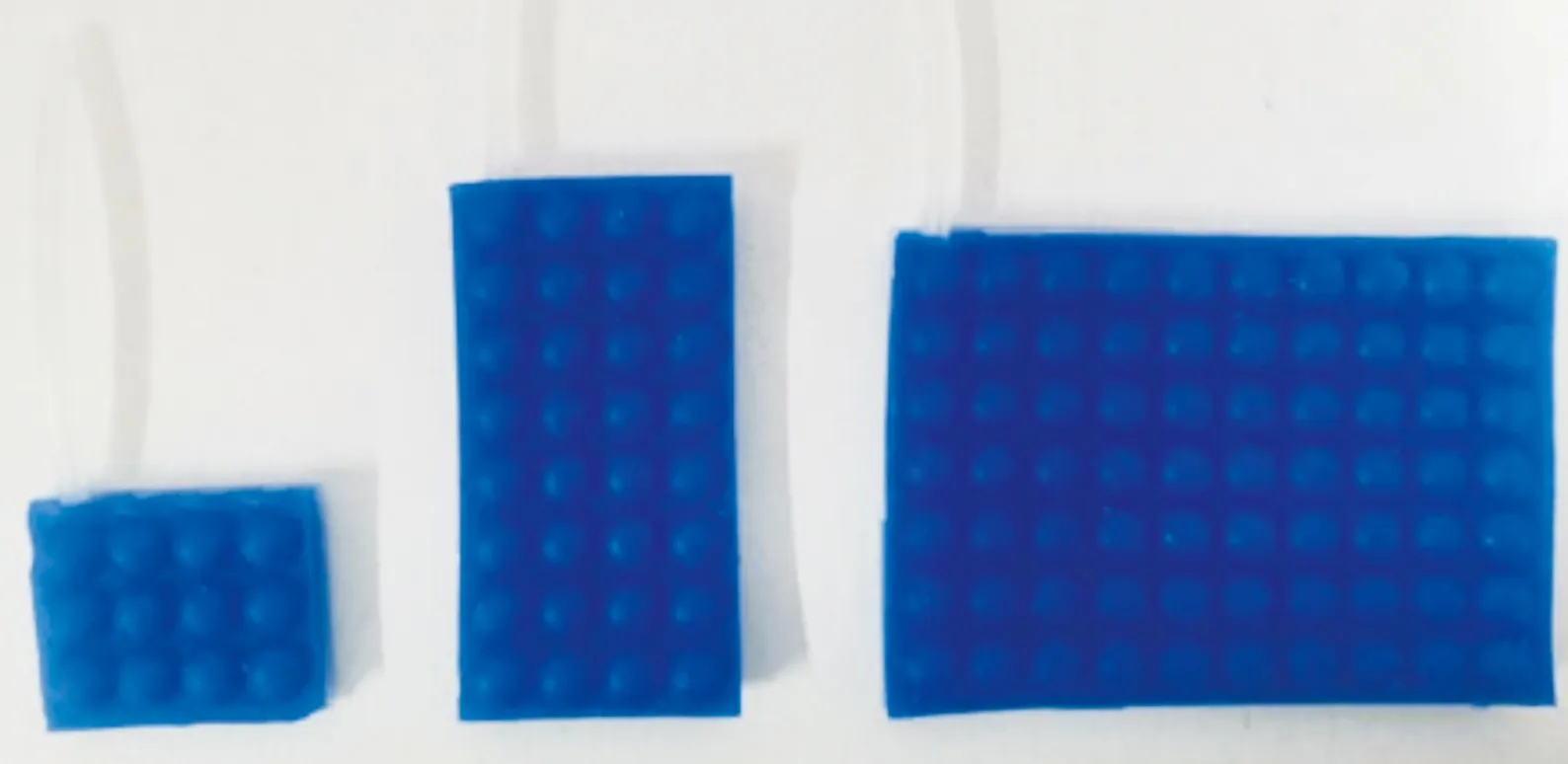
图5 气囊阵列划分实物图
分别对不同气囊阵列施加外部载荷,由气压传感器测量气囊阵列的气压变化。为了保证实验结果的可靠性和准确性,每个气囊阵列均重复此过程5次,取5次数据的平均值作为实验的最终结果,如图6所示。

图6 气囊阵列输出气压曲线
由图6可知,气囊阵列的外部载荷与内部气压值之间呈线性关系,与气囊的仿真结果一致,但气囊单元体数量对气囊阵列的灵敏度存在影响。
3 气囊鞋垫的制备流程
1) 硅胶制备。将Dragon skin 30的A,B两种硅胶液按照质量1∶1混合,搅拌,放置于真空消泡桶中消除空气,待硅胶液中不再产生气泡时消泡完成。
2) 浇注。为保证后期容易脱模,在模具内表面喷上脱模剂,将硅胶液缓慢倒入下层模具中,硅胶液注满后放置于消泡桶中进行二次消泡。
3) 合模。当二次消泡完成后,即可按趾骨区、跖骨区、足弓区、足跟区的顺序将上层的4块模具缓慢扣在下层模具上,如图7所示。

图7 气囊鞋垫模具实物图
4) 固化。将注满硅胶液的模具放置于恒温加热箱中,在恒温70 ℃的环境中静置1 h左右即可完成固化。
5) 脱模。待硅胶液固化后,取下模具上的螺栓和螺母,将上层的趾骨区、跖骨区、足弓区、足跟区模具逐个脱出。
6) 粘合。气囊阵列层取出后,将其与事先准备好的硅胶板通过硅胶粘合剂进行粘合。最终完成后的气囊鞋垫如图8所示。

图8 制作完成的气囊鞋垫实物图
4 硬件设计
4.1 传感器类型选择
采用的传感器需要测量动态和静态力,且需要具备较强的抗干扰能力。由于需要满足便携条件,故传感器的体积和功耗要尽量小。因此,采用MPS-3118系列压阻式压力传感器。
4.2 数据采集部分设计
基于STM32F103C8T6完成对主控芯片及最小系统、电源电路、前置调理电路、模数转换电路、蓝牙模块各单元模块的电路设计。采用4层板的设计方式绘制PCB,并通过全热风循环回流焊接机完成元器件的焊接。数据采集部分是整个足底压力分布测量系统的重要部分,其工作流程:气囊内部气压变化通过气压传感器转化为电压变化输出,气压传感器输出的电压信号经过信号放大和滤波处理后,通过MCU内集成的模数转换模块转换为数字信号,然后利用蓝牙模块进行无线通讯,将采集的数据传输至PC端。数据采集部分的设计方案如图9所示。
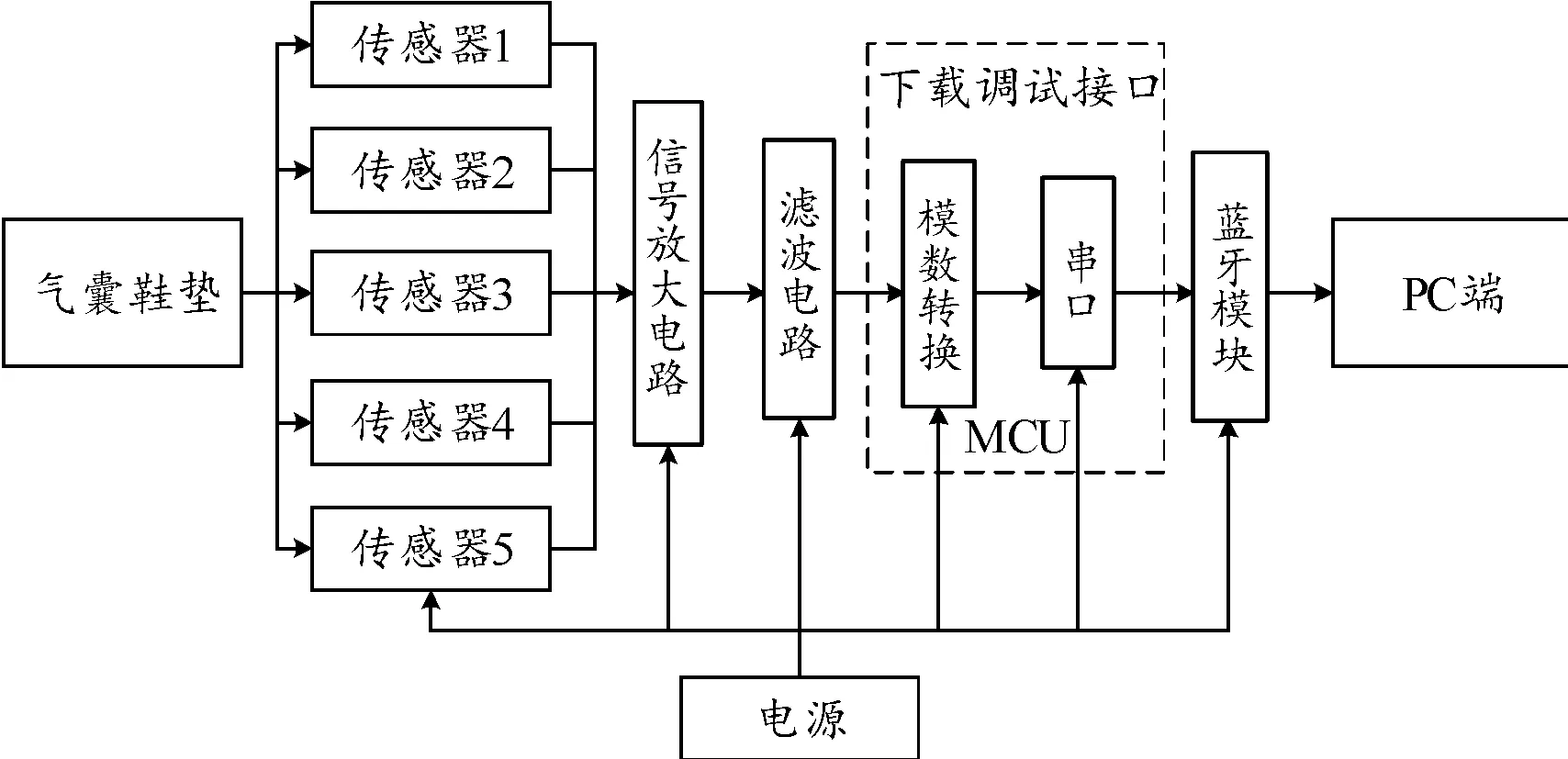
图9 数据采集部分的设计方案
5 系统标定与足底压力测量
5.1 足底压力分布测量系统的标定
对足底压力分布测量系统的各个测量区域进行标定,获得各测量区域的灵敏度。
将气囊鞋垫与系统的数据采集部分连接,将ADC模块转换后的数字信号通过编程还原为放大后的电压信号,打开数据采集部分与PC端的串口助手进行通讯,测试数据收发是否正常。将硬质薄板置于测量区域上,然后利用手动智能推拉力试验机对气囊鞋垫各测量区域施加载荷进行标定,如图10所示(图10中L表示左脚)。

图10 输出电压线性拟合曲线
将各个区域所受的外部载荷与输出电压进行线性拟合,每个测量区域的线性拟合相关性较高,且线性度良好。拟合直线的系数即为测量区域的灵敏度,将各个区域的拟合直线方程编写进主控芯片的程序中就可以计算出足底各区域的底面反作用力,即足底压力分布情况。
5.2 测量系统的迟滞性检测和重复性误差分析
为研究足底压力分布测量系统的测量精度,以足跟区气囊阵列为例,在4×8的气囊阵列上施加分别进行0~320 N的正向和反向加载,电压信号随外部载荷变化如图11所示。

图11 迟滞性误差实验输出电压曲线
通过计算迟滞性误差γH、重复性误差γR、平均测量误差来验证该系统的静态稳定性,具体形式:
(1)
(2)
式中:γH为传感器的延迟误差;γR为传感器的重复性误差;ΔHmax为输出的最大误差;ΔRmax为传感器最大的重复性误差;yFS为满量程输出。
足跟区气囊阵列的迟滞性误差γH为2.8%,重复性误差γR为1.77%。为说明足底压力分布测量系统测量准确性,通过手动智能推拉力试验机的压杆对足跟区气囊阵列施加标准外部载荷,对比气囊阵列测量信号(见表1),平均测量误差为1.91%。说明其静态响应的稳定性较好,达到现有产品的技术水平[24],可应用于足底压力测量。
5.3 足底压力分布测量
将志愿者分为3组:50~60 kg、60~70 kg、70~80 kg。每组2名实验者,穿戴该系统做一些简单动作,采集足底压力分布信息,包括静止站立、直线行走2个动作。
5.3.1足底压力分布测量
静态足底压力分布测量即测量实验者在自然站立过程中的足底压力分布信息。实验开始前,设置数据的采样频率为1 kHz。对实验者的站立姿态规定:实验者双脚分开且保持脚跟在同一水平线,双脚之间的距离与肩同宽,双臂自然下垂,双眼正视前方。实验过程中,实验者保持稳定站立10 s,每位实验者之间间隔3 min;间隔期间,使足底压力分布测量系统处于空载状态。由于6位实验者的静态足底压力分布曲线特征均近似水平线,因此以1号实验者的静态足底压力分布曲线为例进行分析,如图12所示。图12中L表示左脚采集的数据,R表示右脚采集的数据。
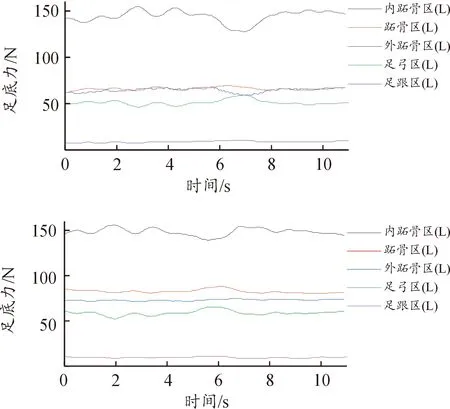
图12 静态足底压力分布曲线
从图12可以看出,人在保持站立姿态时,身体会轻微晃动,趾骨区和足弓区的曲线波动很小,而足跟区的曲线波动较大。当足跟区受力大幅减小或增大时,内跖骨区和外跖骨区的曲线会出现相反的波动,这是由于人体在晃动过程中重心发生转移所致。由此可见,足底压力分布测量系统可以监测静止站立过程中的平衡能力。6名实验者的静态足底压力分布测量数据见表2,表明足底压力分布测量系统可以准确测量足底压力分布。
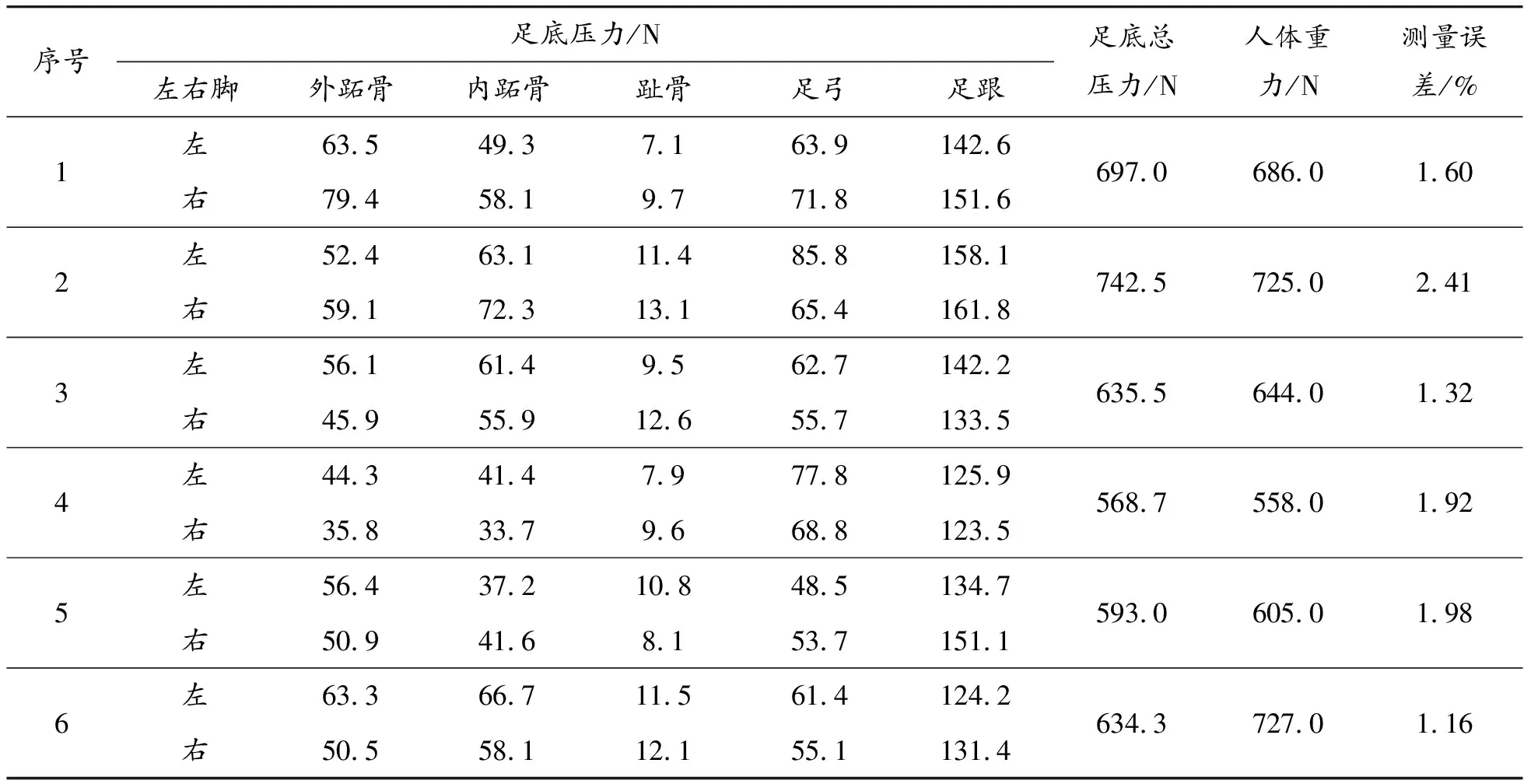
表2 静态足底压力分布测量数据
5.3.2动态足底压力分布测量
用足底压力测量鞋垫进行人体正常步频行走和匀速跑步测试,检测不同步频下步态的划分以及足底压力分布的测量情况。
将采集的6名实验者数据通过Matlab平滑滤波后,输出足底压力分布曲线。由于6名实验者足底压力分布曲线的特征具有一致性,故选取1号实验者的足底压力分区曲线为例进行分析。1号实验者为健康男大学生,足部健康,体质量为 80 kg,身高185 cm,在跑步机上分别进行不同频率的匀速运动测试。测试结果如图13所示,L表示左脚采集的数据,R表示右脚采集的数据。

图13 人体正常步频和跑步状态的足底压力测试结果
由图13可知,穿鞋垫测试时的频率响应特征显著。图13(a)中的5个曲线在足底对应5个测量区域。A1C1段为左双撑阶段;C1D1段为左单撑阶段;D1E1段为右双撑阶段;E1F1段为右单撑阶段。在1个步态周期内,足跟区、足弓区、跖骨区和趾骨区会依次出现压力峰值,反映出动态情形下各测量区域的压力变化趋势,表明足底压力中心是在足跟和脚趾之间的连线上移动,可以实现直线行走过程中足底压力分布测量和步态阶段划分。由图13(b)可知,随着步频的加快,内跖骨区域的压力逐步加大,而足弓区域的压力相对减小,与实际情况符合。气囊鞋垫也可以实现直线慢跑过程的足底压力分布测量。
6 结论
基于气囊结构设计足底压力分布测量系统,实现足底5个区域的压力测量,完成足底压力分布测量系统的制作。对足跟区气囊阵列进行测量精度实验,结果表明足底压力分布测量系统具有良好的测量精度。测量人体在静态、不同步态下的足底压力分布,实验结果表明足底压力分布测量系统的迟滞性误差为2.8%,重复性误差为1.77%,平均测量误差为1.91%,具有良好的测量精度,具有较高的测量精度和稳定性;能通过各区域的连续足底压力实现步态阶段划分。
根据足部结构研究的足底压力分布测量系统传感器与气囊鞋垫分离结构,可提高穿戴的舒适性,且具有成本低、可靠性高、寿命长等特性,能够有效获取足底压力分布特征并进行步态阶段划分,可为步态研究、康复训练、平衡能力评估等应用提供参考。但是,由于各气囊阵列灵敏度存在差异,故需进一步研究气囊阵列灵敏度的影响因素,提高足底压力分布测量系统的动态测量精度。
