基于H-infinity动态观测器的车辆质心侧偏角融合估计算法
2023-11-15唐健良曹鑫鑫严家添耿莉敏
唐健良,曹鑫鑫,严家添,耿莉敏,高 楠
(1.广州公路工程集团有限公司,广州 510730;2.长安大学 能源与电气工程学院,西安 710018)
0 引言
随着人们生活水平的不断提高和机动车保有量的不断增加,人们对于车辆安全性和舒适性等方面的要求越来越高。为了满足这些需求,伴随科学技术的不断发展,涌现出许多车辆控制技术,如驱动防滑控制、制动防抱死控制、电子稳定控制、四轮转向控制、主动前后轮转向技术和主动抗侧倾控制等。上述控制系统工作时均需使用车辆行驶过程中的实时状态信息,例如横摆角速度、质心侧偏角、路面附着系数和轮胎侧偏角等。其中,车辆质心侧偏角作为车辆纵向与质心运动方向之间的夹角,在一定程度上反映了车辆转向时偏离目标轨迹的情况,并集中反映了车辆跟踪目标轨迹的能力,能够直接显示车辆的稳定性状态,对于车辆的稳定控制具有非常重要的意义[1-5]。
在实际工作过程中,获取质心侧偏角所使用的传感器不仅价格比较高昂,而且在使用过程中容易引入外界干扰信号并且具有较大的延迟,综合考虑,使用传感器测量质心侧偏角无法在量产车上实现。目前,普遍采取的措施是通过成本较低的车载传感器采集车辆其他相关状态信息,并结合车辆动力学特性分析,利用状态观测器对质心侧偏角进行估计[6-8]。
目前车辆质心侧偏角估计常用的方法有状态观测器法、卡尔曼滤波法、粒子滤波法和模糊逻辑估计法等。Chen等[9]针对四轮独立驱动电动汽车,将自适应平方根容积算法与卡尔曼滤波算法结合,提出一种车辆纵向-横向参数协同估计算法,提高车辆质心侧偏角的估计性能。刘蓬勃等[10]为了提升车辆在极限工况下的行驶稳定性,结合差分法消除车载混杂噪声对参数测量值的影响,利用基于卡尔曼滤波算法融合3个陀螺数据的虚拟陀螺技术,估计车辆质心侧偏角。柴晓辉等[11]针对分布式纯电动汽车非线性和非高斯的行驶特点和四轮独立控制的特点,以自适应遗传粒子滤波算法为基础,提出一种改进的粒子选择算法,将车辆动力学估计和运动学估计相结合,对车辆质心侧偏角进行估计。张征等[12]针对轮毂电机驱动电动汽车,提出一种基于无迹粒子滤波的质心侧偏角估计方法,该方法在粒子滤波算法基础上,通过无迹变换方法调整粒子分布来改善粒子退化的问题。Li等[13]利用自适应事件触发机制在传感器和滤波器之间进行采样数据的选取,提出一种基于事件触发机制的模糊滤波算法来估计车辆质心侧偏角。李伟等[14]将径向基算法与模糊控制算法相结合,提出一种基于质心侧偏角估计的后轮优先制动力优化分配方案,提高车辆在极端条件下的行车稳定性。
在众多估计方法中,状态观测器法因其估计过程简单且实时性好,得到了大量的研究。王洪波等[15]将状态观测器和惯性测量单元信号积分进行数据融合,实现传感器信号估计对观测器估计值的修正,从而提高了观测器性能。Luo等[16]利用基于H-infinity理论的状态观测器,减少了外界干扰信号对质心侧偏角估计值的影响,并将其应用到车辆直接转矩控制和自适应悬架系统中。针对双电机后驱电动汽车转向稳定性控制问题中质心侧偏角具有非线性特征的问题,Zhao等[17]提出了一种滑模状态观测器,利用滑模控制原理解决非线性估计问题,实现对质心侧偏角的估计。Wang等[18]将质心侧偏角估计问题引入到车辆路径跟踪控制中,设计了一种基于观测器的闭环控制系统,实现对规划路径的跟踪[18]。
上述研究中使用的状态观测器为比例观测器,即观测器中有一个比例参数。比例观测器在使用时会在估计值中存在一个稳态误差,需要借助其他手段来消除,从而增加系统结构复杂性。为了解决这一问题,Park等[19]提出了一种新型动态观测器结构,该动态观测器包含动态参数,不仅可以消除估计过程中的稳态误差,还可以提高估计过程的暂态跟踪性能。近些年有很多关于动态观测器的研究,Gao等[20]针对具有未知输入信号的连续时间线性系统,设计了一种规范化的动态观测器模型,并通过仿真验证了动态观测器的跟踪性能。Echreshavi等[21]研究了基于动态观测器的离散时间系统的模糊滑模控制器设计问题,通过模糊逻辑算法,确定了动态观测器的各参数矩阵。Alikhani等[22]将动态观测器应用到网络安全中,研究了基于动态观测器的故障诊断算法。Gao等[23]研究动态观测器在非线性系统中的应用,针对一类Lipschitz非线性系统,设计了一种鲁棒动态观测器。
上述关于动态观测器的研究,大部分与线性系统有关,少有关于车辆这一典型非线性系统的研究。针对这一问题,提出一种基于H-infinity理论和动态观测器理论的车辆质心侧偏角融合估计算法。首先,通过对误差向量的无偏性数学分析,将动态观测器参数矩阵的求解问题转换成系统渐进稳定性分析问题。然后,通过构建李雅普诺夫函数,并求解一个线性矩阵不等式,得到动态观测器的所有参数矩阵。最后,建立车辆2自由度动力学非线性模型,并在模型中加入干扰向量,模拟车辆状态信息在通信通道传输中存在的噪声干扰。通过CarSim-Simulink联合仿真,验证所提方法的有效性。
1 问题提出
考虑如下Lipschitz非线性系统:
(1)
y=Cx+Ew
(2)
式中:系统初始状态x(0)=x0;x∈Rn为系统状态向量;u∈Rm为系统控制输入向量;w∈Rf为外接干扰向量;y∈Rp为系统输出向量;n、m、f和p为对应向量的维数;A、B、C、D和E为已知系统参数矩阵。
g(x)为Lipschitz非线性项,满足下述约束条件[24]:
(3)
式中,λ>0为已知的Lipschitz常数。
针对非线性系统(1)和(2),考虑如下动态观测器:
(4)
(5)
(6)

根据动态观测器(4)—(6)可得;当矩阵变量N=A-KC,J=K,H=B,T=I,P=0,Q=0,G=0,R=I和S=0时,可将动态观测器(4)—(6)转化如下标准比例观测器[25]:
本文的目标是针对Lipschitz非线性系统(1)和(2),设计动态观测器(4)—(6),即求解参数矩阵N、J、H、M、T、P、Q、G、R和S,以满足下列条件:
1) 当外界干扰w=0时,估计误差e→0,当t→∞;
2) 当外界干扰w≠0时,无穷范数Twe∞<η。
在求解之前,定义如下变量ε∈Rq:
ε=z-Tx
(7)
式中,矩阵T∈Rq×n。对式(7)求微分可得式(8):

TAx-TBu-Tg(x)-TDw=
N(z-Tx)+NTx+JCx+JEw+Hu+
Nε+Mv+(JE-TD)w+
(8)
另一方面,根据式(5)和式(6)可得式(9)和式(10):

P(z-Tx)+PTx+QCx+QEw+Gv=
(9)

(10)
由式(8)—式(10)可知,如果下述条件成立:
NT+JC-TA=0
(11)
H-TB=0
(12)
PT+QC=0
(13)
RT+SC=I
(14)
则可得如下方程:
(15)
(16)
e=Rε+SEw
(17)
上述方程亦可写成如下系统:

(18)
e=ζ+w
(19)
其中,
=SE,
通过上述分析可知,动态观测器(4)—(6)的设计问题可转换成系统(18)和(19)的稳定性分析问题,即求解矩阵、、、和,以满足以下2个目标。
目标1:当外界干扰w=0时,系统(18)和(19)渐进稳定当时间t→∞;
目标2:当外界干扰w≠0时,无穷范数Twe∞<η。
2 参数变换
本节将对参数方程组(11)—(14)进行分析,得到动态观测器参数矩阵的数学表达式。根据式(11)—式(13)可得如下方程:
(20)
上述方程有解的条件是要满足下面的矩阵秩条件(21):
(21)
假设选取一个矩阵T,满足条件(21),则方程(20)的解可以表示为:
(22)

根据文献[20]的计算过程,可得如下关于动态观测器(4)—(6)中参数矩阵N、J、P、Q、R和S的表达式:
N=TAα1-Z1β1
(23)
J=TAα2-Z1β2
(24)
P=-Z2β1
(25)
Q=-Z2β2
(26)
R=α1
(27)
S=α2
(28)
式中,

(29)

将式(23)—式(28)代入系统(18)和(19)可得如下结果:
=
1+Z2
(30)
=
1+2
(31)
(32)
=α2E
(33)
通过上述分析可知,参数矩阵R和S可以通过式(27)和式(28)求得。如果求解出参数矩阵Z,则可得到动态观测器(4)—(6)中的参数矩阵M、G、Z1和Z2,矩阵N、J、P和Q可通过式(23)—式(26)求得。因此,如果可以求得参数矩阵,则动态观测器(4)—(6)中的所有参数均可求解。
3 问题求解
定理1如果存在一个对称正定矩阵,一个矩阵1,2个给定正实数λ和η,使得下述线性矩阵不等式成立:
(34)

(λ+1)T
(35)
Ω2=1+12+(λ+1)T
(36)
Ω3=(λ+1)T-η2I
(37)

=-11
求得。
证明:
(38)
其中,
V(ζ)=ζTζ
(39)
对式(39)求微分可得:
[ζ+w+]Tζ+
ζT[ζ+w+]=
ζTTζ+wTTTζ+
TTζ+ζTζ+
ζTw+ζT=
&ζT(T+)ζ+wtBTTζ+
ζTw+2ζT
(40)
接下来,对于式(40)中的各项,可得如下结果,其中:
2ζT=2ζT
(41)
考虑Lipschitz约束条件(2),可得:
(42)
将式(41)和(42)代入式(43)可得:
wTTTζ+ζTw+λeTe
(43)
再将式(43)代入不等式(34)可得:
ζT(T++λT)ζ+
wTTTζ+ζTw+(λ+1)eTe-η2wTw
(44)
另一方面,根据式(19)可得:
eTe=(ζ+w)T(ζ+w)=
ζTTζ+ζTTw+
wTTζ+wTTw
(45)
考虑式(44)和(45),可得如下结果:
wTTζ+ζTw+(λ+1)eTe+
ζT(T++λT)ζ-η2wTw=
ζT[T++λT+(λ+1)T]ζ+
ζT[+(λ+1)T]w+
wT[T+(λ+1)T]ζ+
wT[(λ+1)T-η2I]w=
(46)
其中,
(47)
Ω4=T++λT+
(λ+1)T
(48)
Ω5=+(λ+1)T
(49)
由上述分析可知,不等式(34)成立的充分条件是Ω<0。接下来,运用舒尔补理论,可将Ω<0转换成以下线性矩阵不等式(50):
(50)
(51)
证明结束。
步骤1根据矩阵秩条件(21),选择矩阵T。
步骤2根据方程(29),计算中间矩阵α1、α2、β1和β2。
步骤3根据方程(27)和(28),计算R和S。
步骤4根据方程(30)—(33),计算矩阵A1、A2、B1、B2、C、D和F。
步骤5:根据定理1,求解参数矩阵Z。
步骤6:根据方程(23)—(26),计算矩阵N、J、P和Q。
4 车辆模型
通过上文分析,针对非线性系统(1)和(2),可以设计动态观测器(4)—(6)。本节将上文的研究成果应用到车辆质心侧偏角估计过程中,所用车辆模型参考文献[16-18]可得:
(52)
(53)
式中:m为整车质量;Vx为纵向车速;β为质心侧偏角;γ为横摆角速度;Fyr后轮侧向轮胎力;Fyf为前轮侧向轮胎力;Iz为转动惯量;lf质心距前轴距离;lr质心距后轴距离;d为外部干扰信号;g1(x)和g2(x)为模拟系统中的非线性参数。
Fyr和Fyf可用式(54)和式(55)表示:
Fyf=Cyfαf
(54)
Fyr=Cyrαr
(55)
式中:Cyf为前轮侧偏刚度;Cyr为后轮侧偏刚度。
αf和αr可用式(56)和式(57)表示:
(56)
(57)
将上述结果整理后写成形如方程(1)和(2)的系统:
(58)
y=Cx+Ew
(59)
式中:
5 仿真
为了验证本文提出的基于H-infinity动态观测器的质心侧偏角融合估计算法,本节基于CarSim和Simulink软件搭建了联合仿真模型并进行仿真试验。仿真试验中各参数取值参照文献[16]中所取数值,具体如表1所示。

表1 车辆参数
系统中的外部干扰w为一个正弦信号。非线性函数为:g1(x)=0.5sinx1,g2(x)=0.6sinx2。
本文在标准蛇形工况和双移线工况下进行仿真,并将所提出的算法与传统比例观测器进行对比验证。
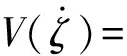
5.1 标准蛇形工况

图1 质心侧偏角估计
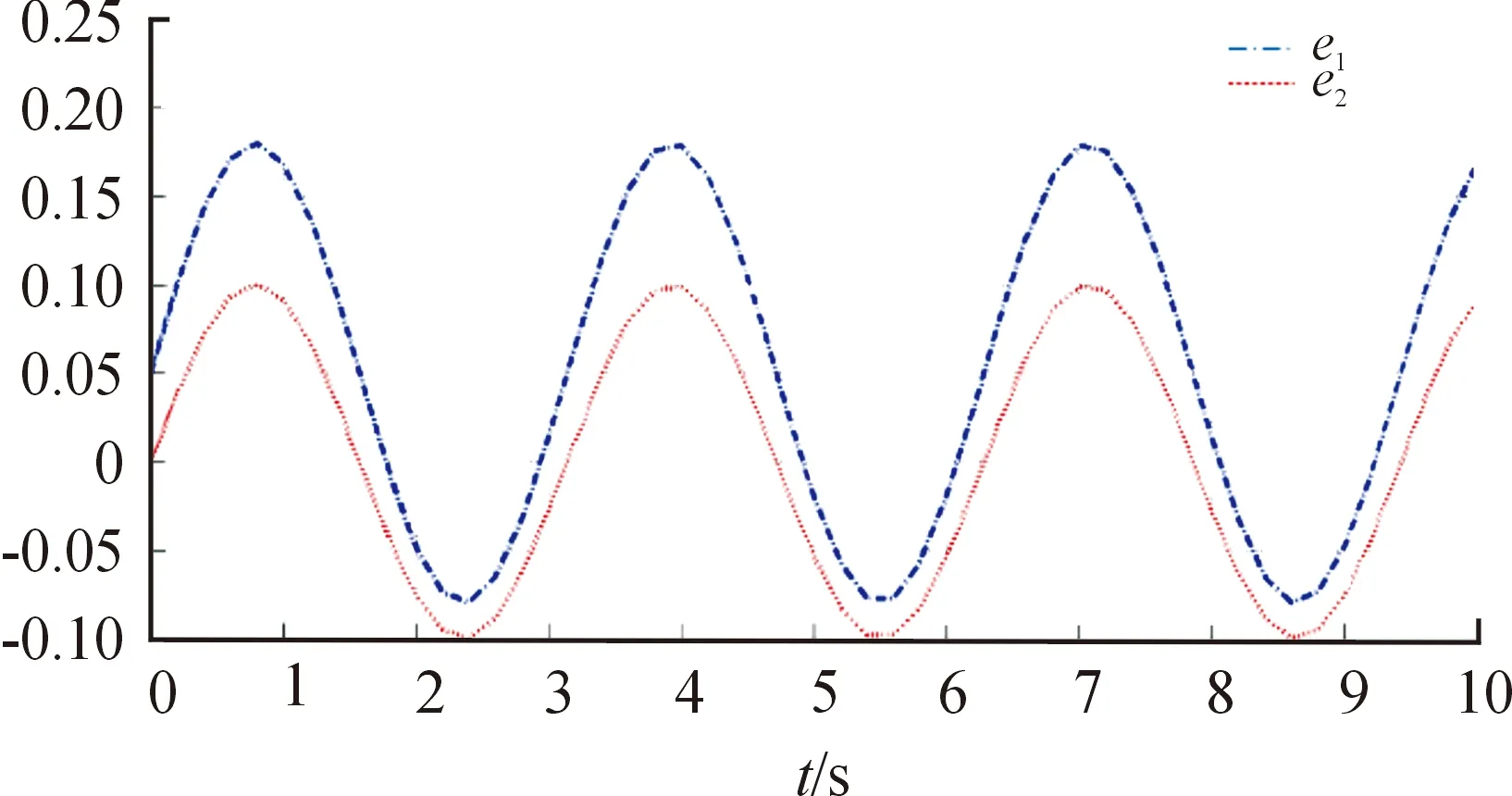
图2 质心侧偏角估计误差e
由图2可以看出,所提动态观测器在有干扰信号和非线性因素时的质心侧偏角估计性能。点划线为传统比例观测器质心侧偏角估计误差e1,虚线为本文所提出的动态观测器质心侧偏角估计值e2。一方面,比例观测由于仅有一个比例参数,所以在估计时有一个稳态误差。本文所提动态观测器,在动态参数的调节下,估计值中不存在稳态误差。另一方面,当有干扰信号输入时,通过使用H-infinity理论,外界正弦干扰信号对所提出算法得到的质心侧偏角估计值影响被大大削弱。
从图1和图2还可知,在系统非线性因素的影响下,本文所提出的算法仍可以正常工作。系统非线性因素使得实际质心侧偏角产生波动,这时所提算法得到的质心侧偏角估计值也同样随之波动,紧紧跟踪质心侧偏角实际变化。
5.2 双移线工况

图3 质心侧偏角估计
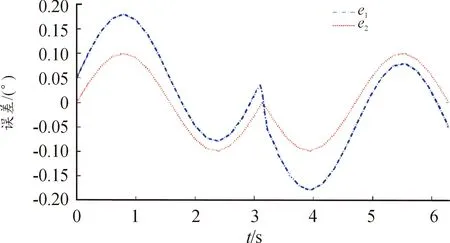
图4 质心侧偏角估计误差e
图4中,点划线为传统比例观测器质心侧偏角估计误差e1,虚线为本文所提出的动态观测器质心侧偏角估计值e2。从图3和图4可知,比例观测器的估计值中存在稳态误差,而动态观测器估计值没有稳态误差,并且在H-infinity理论的作用下,外界正弦干扰信号对所提出算法得到的质心侧偏角估计值影响被大大削弱。
综合分析,对于具有干扰信号的非线性车辆系统,本文所提出的估计算法具有良好的性能,可以实时跟踪质心侧偏角期望值。
6 结论
本文提出了一种基于H-infinity理论和动态观测器理论融合的车辆质心侧偏角融合估计算法。本方法采用的观测器包含动态参数变量,可以提高估计算法的暂态和稳态性能。由于传输车辆状态信息的通信信道存在噪声干扰,采用H-infinity算法处理噪声对质心侧偏角估计的影响。
首先,通过对误差向量的无偏性数学分析,将动态观测器参数矩阵的求解问题转换成系统渐进稳定性分析问题。然后,构建李雅普诺夫函数,将系统渐进稳定性分析问题转换成线性矩阵不等式的求解问题,通过求解线性不等式,得到动态观测器的所有参数矩阵。最后,建立车辆2自由度动力学模型,并在模型中加入干扰信号和非线性信号,模拟车辆状态信息在通信通道传输中引入的噪声干扰和车辆模型的非线性特征。在CarSim中搭建车辆非线性模型,在Simulink中搭建所提估计算法模型,并进行CarSim-Simulink联合仿真,对提出的算法进行仿真试验,试验结果表明本文提出的算法具有较高的可靠性。
在今后的研究工作中,一方面,进一步拓宽所提出的动态观测器的应用环境,例如具有时间延迟的系统、离散系统和非奇异系统等,研究这些系统调价下动态观测器的设计方法;另一方面,将研究成果应用到实际控制系统中,重点研究基于观测器的车辆控制系统设计。将动态观测器得到的系统状态参数值,作为车辆控制系统输入的实际值,帮助控制系统实现特定的功能。
