陆探一号卫星严格回归轨道管道导航在轨应用与验证
2023-11-13杨盛庆刘美师王嘉轶栗双岭
杨盛庆, 王 禹, 岳 杨, 刘美师, 王嘉轶, 栗双岭
1. 上海航天控制技术研究所, 上海 201109
2. 上海市空间智能控制技术重点实验室, 上海 201109
3. 上海卫星工程研究所, 上海 201109
0 引 言
太阳同步轨道的轨道面进动率与地球绕太阳公转周期一致,轨道的光照条件好[1-2].一个轨道周期内大气环境温度稳定,大气密度一致性较好,轨道衰减情况稳定,有利于在轨辨识轨道衰减率.此类轨道所受日月三体引力摄动的影响较为确定,长期效应和周期效应可辨识,有利于实施高精度的轨道/轨迹保持.国外,多个卫星项目提出了精确回归轨道和管道保持的概念,譬如德国的ERS卫星、TerraSAR-X卫星、欧空局的Sentinel卫星和日本的ALOS卫星[3].国内,上海航天技术研究院研制了国内首个具有严格回归轨道控制任务的陆探一号(LT1)卫星[4].陆探一号已于2022年初发射入轨,进入轨道高度约600 km的太阳同步回归冻结轨道,具备自主管道导航[5]和管道保持能力[6].
经优化设计,遥感卫星能够具有一项重要的轨道特征即星下点轨迹的回归重访[7],基于交点距构建覆盖圆是一种较直观的回归特性表征方式[8].严格回归轨道的提出,将回归的概念提升到对空间轨迹的高精度重访[4].管道保持以严格回归轨道为参考轨道,要求卫星的运行轨迹保持在参考轨道附近的管道内.需要对轨道面内运动和轨道面外运动进行补偿控制,以实现空间轨迹的重访.轨道面内的运动主要由于大气阻力作用导致轨道衰减,轨道角速度的变化导致卫星在轨的轨道相位相对于参考轨道相位产生漂移,在地球自转的作用下使得地面轨迹产生漂移[9-10].管道导航与管道保持的参考轨道是一组考虑高阶次地球非球形引力场的地固系位置、速度参数.长周期的高精度回归轨道,其运动轨迹的重访将受到日月三体引力等摄动因素的影响[11].为了参考轨道的重复使用,未考虑非保守力摄动和历元相关的日月三体摄动[12].基于高精度轨道动力学确定的严格回归轨道,将近地遥感卫星与参考轨道视为一个虚拟编队,以虚拟编队相对运动特性作为导航分析的对象[5].管道导航的目的是提炼出卫星与参考轨道采样点之间的相位时间偏差和相对运动的特征量,进而参考编队控制策略来实现虚拟编队的管道保持.由于参考轨道的设计仅考虑地球非球形引力场作用,与在轨卫星的真实动力学环境存在差别,这导致两者之间存在沿航向漂移.基于轨道动力学模型和“二分法”位置确定方法,设计了卫星与参考轨道采样点的沿航向对齐算法[5],从而获取了卫星相对参考轨道采样点的相位时间偏差和卫星在虚拟编队坐标系切航平面内的相对运动轨迹,进而引入椭圆的“最小二乘适配法”获取相对运动轨迹的特征量.管道导航输入瞬时定位信息,通过几何特征的拟合算法能够获取轨道的平均运动特征,属于自主智能算法的一类应用[13-14].相对运动轨迹特征量中的一项重要参数是卫星相对于参考轨道的相对运动轨迹椭圆中心位置,其与虚拟编队原点的偏离情况,可以表征轨道衰减情况.其变化率即为轨道衰减速率,进而可以进行大气密度的估算[15-17].严格回归轨道属于一类特殊的太阳同步回归冻结轨道,从以往的地面轨迹重访升级为高精度的空间轨迹重访.陆探一号的管道导航主要进行沿航向的空间和时间补偿、针对相对运动轨迹特征参数辨识的椭圆拟合,能够获取自主管道保持控制所需的相位时间偏差和轨道衰减状态、轨道衰减率.
本文基于陆探一号的在轨遥测数据,分析了严格回归轨道管道导航的在轨应用情况.针对降交点地方时、轨道倾角、偏心率和近地点幅角,比较了参考轨道和实际在轨的运动情况.同时,针对管道导航提出的相位时间偏差和相对运动特征参数确定方法,分析了相关参数的在轨遥测数据,分析了轨道衰减情况和大气密度波动情况.同时,针对参考轨道重复使用面临的轨道面外运动特征(主要表现为日月三体摄动引起的轨道倾角周期性变化),进行了地面数据分析.结合空间环境预报中心发布的实测F10.7参数,分析了大气摄动、大气密度经验公式和管道导航在轨确定的一致性,验证了轨道衰减率在轨估计的有效性.
1 参考轨道的动力学特性
1.1 太阳同步与冻结特性[9-10]
参考轨道是利用高阶次地球非球形引力场设计的太阳同步回归冻结轨道,具有高精度空间轨迹重访的特征[4].考虑到高阶次地球非球形引力场积分运算的计算复杂度,可以在地面进行优化设计,以固定时间间隔的批量地固系位置、速度采样点信息存储于星载软件进行管道导航计算.

(1)
其中,e为偏心率,n为轨道角速度,Re为地球半径,J2为地球非球形引力场J2项系数.依据冻结轨道的要求,轨道根数e、ω满足
(2)
其中,ω为近地点幅角,J3为地球非球形引力场J3项系数.

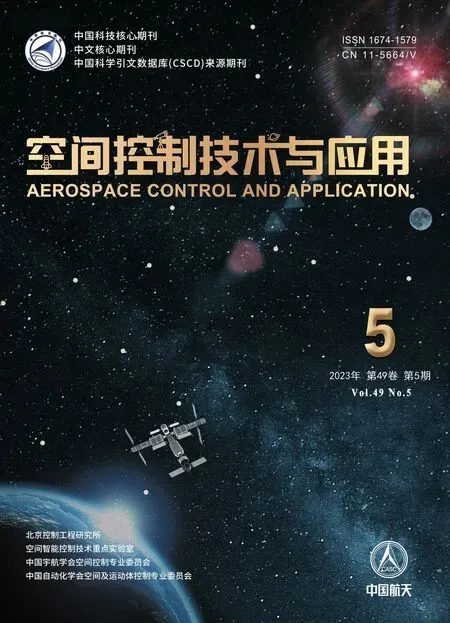
图1 参考轨道的轨道运动特征
基于遥测数据解析的陆探一号卫星在轨运动特征,如图2所示.遥测数据采样区间内,陆探一号在轨的降交点地方时Tl∈[6.008 0,6.008 3] h,卫星相对于参考轨道的升交点赤经偏差如式(3)所示
(3)
1.2 回归特性
利用地固系位置信息计算相应的地心经度λ和地心纬度φ,如式(4)所示
(4)

(5)
使用经度补偿方式确定区间内升交点的地心经度,补偿方法如式(6)所示
(6)
确定各升交点地心经度后,投影到单位圆,如式(7)所示
(7)
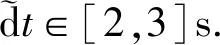
对于参考轨道,一天时间跨度下的地心经纬度变化和升交点地心经度如图3所示.如图4所示,采用交点距构建的覆盖圆显示一个回归周期始末(相隔119轨)的升交点地心经度的回归情况较好.

图3 基于采样点的升交点地心经纬度确定方法
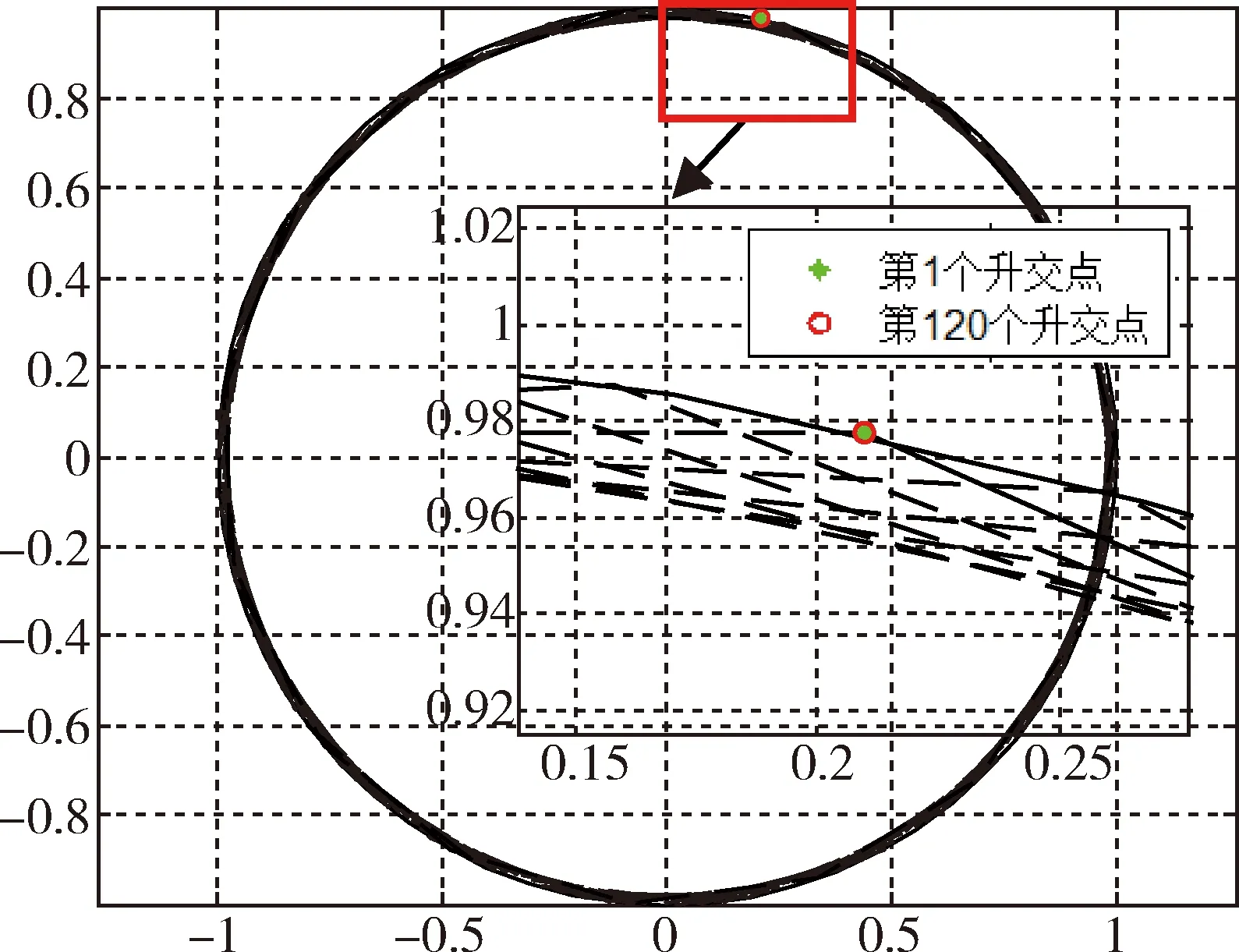
图4 利用交点距构建的覆盖圆分析参考轨道的回归情况
如文献[4]所述,使用高精度的轨道动力学模型和迭代修正方法,可以实现米级精度空间轨迹重访的严格回归轨道.参考轨道的设计结果为一组轨道初值,可以衍生出一个回归周期内的参考轨道采样点.计算参考轨道采样点的过程涉及高精度轨道动力学积分,星载软件难以在线更新.因此,参考轨道在发射前设计好并存储于星载计算机的存储空间.参考轨道满足地固系下的严格回归,星载计算机存储一个回归周期内的地固系位置、速度,通过历元与惯性系位置、速度进行相互转换.参考轨道的设计过程针对固定的起始历元,在轨重复使用参考轨道时,每个回归周期的结束也是下一个回归周期的起始.为了验证参考轨道重复使用的有效性,以月为更新频率替换严格回归轨道初值对应的历元,对同一个起始地固系位置、速度进行一个回归周期的轨道积分,并确定地固系位置的回归精度.如图5所示,8年时间跨度下,参考轨道重复使用的回归精度呈年周期变化,与地球天体运动的岁差章动相关,主要集中在地固系Z轴.

图5 参考轨道重复使用的有效性
2 管道导航的在轨应用
2.1 管道导航原理与软件设计
管道导航构建了基于参考轨道的虚拟编队,实现了沿航向相位时间偏差和相对运动轨迹特征量的高精度确定.同时,导航算法设计了多任务多时序异构计算功能,以及多个回归周期的参考轨道基准重复使用的时序管理功能.利用数据驱动的瞬时定位信息,能够长期稳定地获取卫星在轨相对于参考轨道的平均运动特征.管道导航的参考轨道采用离散采样点数据形式存储于星载计算机,一轨约32个采样点包含历元和地固系位置、速度信息.卫星自身定位采用测控分系统提供的1 Hz频率GNSS定位数据,通过时刻匹配定时触发卫星与参考轨道的偏差状态计算,管道导航的系统结构如图6所示.
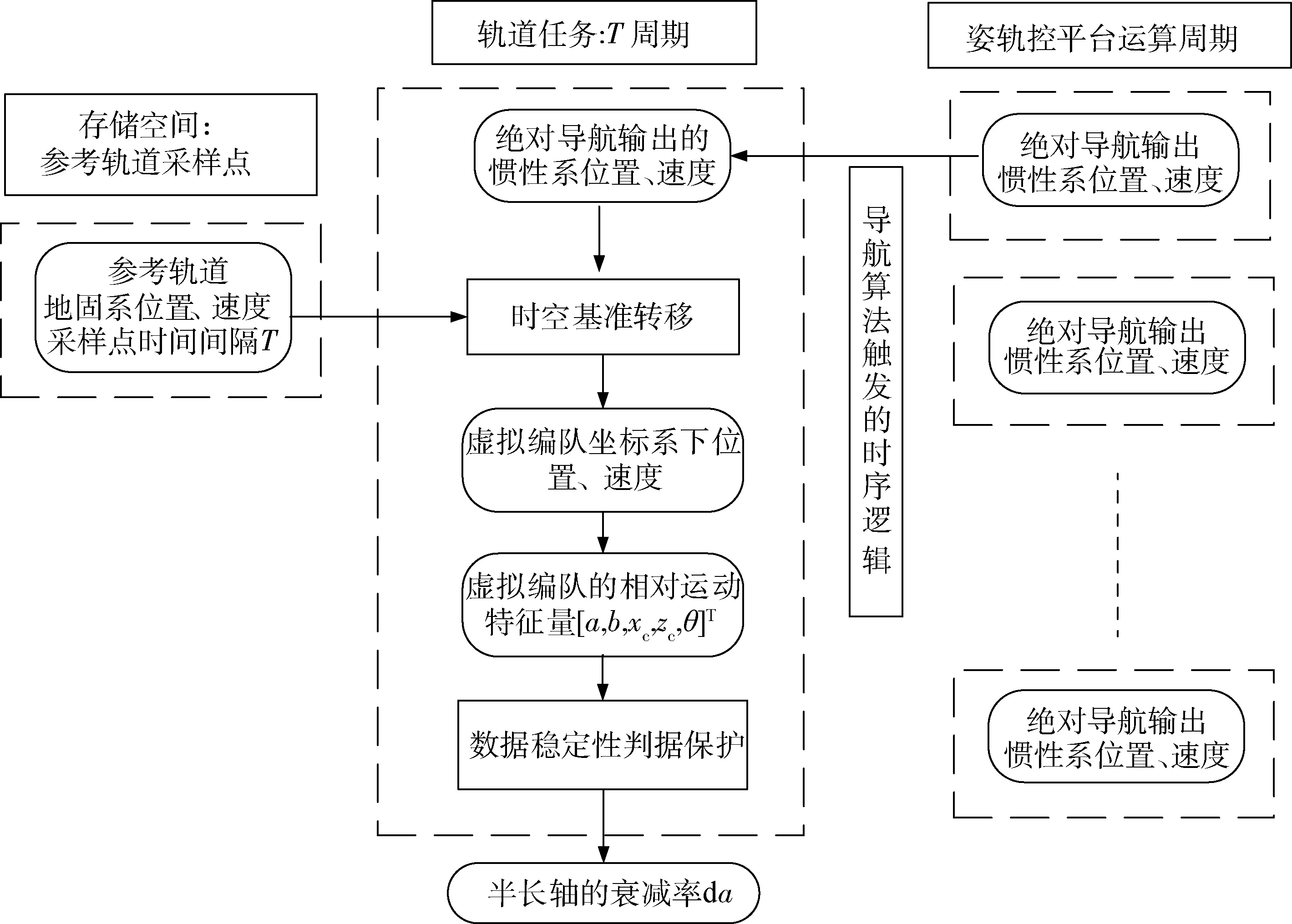
图6 管道导航系统结构图
针对管道导航算法时序要求与计算需求,星载软件的管道导航算法基于可抢占实时操作系统内核,设计了多线程处理流程,多线程运行时序如图7所示.姿轨控TSC695F平台任务采用定周期,具有最高优先级,保证实时性.管道导航任务自主挂起并由姿轨控任务判断并唤醒,使用周期内剩余时间逐步完成管道导航算法.同时考虑到多线程对共享资源的访问应当具备互斥性,使用优先级锁保护可避免数据不完整的情况发生,提高软件的可靠性.
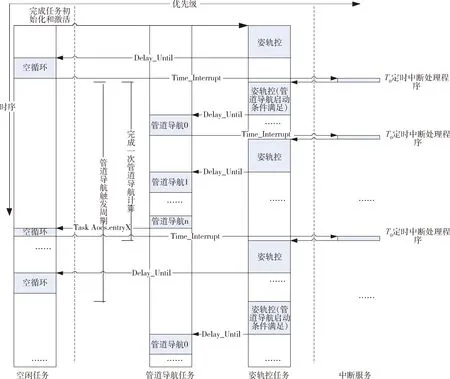
图7 多线程运行时序图
2.2 轨道面内相对运动
如文献[5]所述,管道导航的2个重要计算环节为沿航向对齐、相对运动轨迹的椭圆拟合计算.沿航向对齐进行空间补偿,通过动力学积分精确确定卫星与参考轨道的相位时间偏差.椭圆拟合算法属于几何方法,通过小量样本的低频次计算提取相对轨迹的几何特征.特征参数具有明确的物理意义如图8所示,卫星在虚拟编队坐标系XHOYH平面内的相对运动轨迹为一个偏置的倾斜椭圆.参考编队坐标系定义[18],虚拟编队坐标系以参考轨道的采样点为原点O,径向OXH轴沿地心E指向O,切向OYH轴在参考轨道平面内垂直OXH,指向飞行方向为正,法向OZH轴与OXH轴、OYH轴构成右手坐标系.
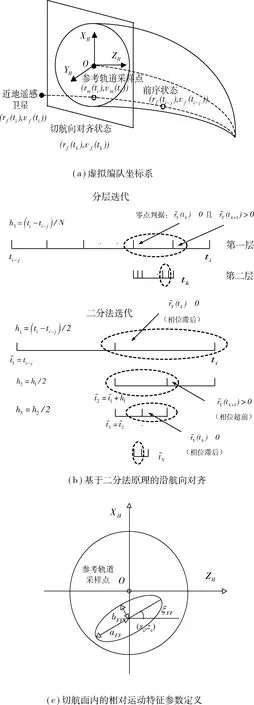
图8 管道导航原理说明
管道导航的在轨遥测数据如图9所示,真实反映了卫星在轨相对于参考轨道的相位时间偏差变化情况和卫星相对参考轨道的轨道高度变化情况.相位时间偏差dt表征了陆探一号卫星相对于参考轨道的沿航向相对运动的相位关系.管道导航参数zc表征了卫星相对于参考轨道的轨道衰减情况,可以理解为虚拟编队的半长轴偏差.卫星在轨相位滞后于参考轨道,dt取值正数区间,代表卫星轨道需要向前补时才能弥补相位的偏差.
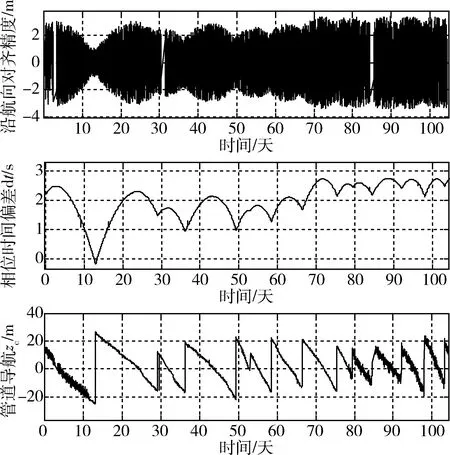
图9 管道导航的在轨遥测数据
管道控制的管径是一个时变状态,图9展示了多次轨道面内控制的过程.dt结合地球自转速率和卫星所处纬度即可确定瞬时的管径状态.从图9中可以观察到,轨道抬升控制后zc由负值变为正值,此刻dt的导数发生极性变化.当zc跨越零值时,卫星相位滞后量达到极值.GNSS接收机米级定位精度和厘米级测速精度条件下,椭圆拟合算法即可保证特征参数具有较高的确定精度.
如图9所示,沿航向对齐的精度优于4 m,结合卫星在轨飞行线速度估算相位时间偏差的确定精度,dt的确定精度优于5×10-4s.由于大气阻力的作用,卫星在轨的轨道相对于参考轨道处于衰减状态,管道导航zc遥测数据的局部放大如图10所示,可以观察到半长轴衰减的确定精度优于米级.
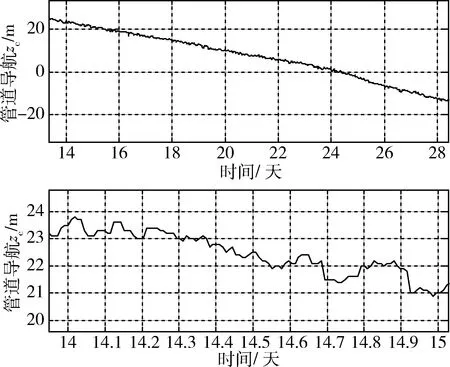
图10 管道导航zc遥测数据的局部放大
2.3 轨道面外相对运动
(8)


(9)
其中,em、im、ωm和Mm为月球在J2000.0地心黄道坐标系中的平均轨道根数[9].
对卫星遥测数据进行分析,轨道的数据源为GNSS接收机测量的时间历元和地球固联WGS84坐标系下rWGS84、vWGS84.参考系ICRS(international celestial reference system)与地固系ITRS(international terrestrial reference system)之间的坐标系转换涉及岁差PR、章动NR、地球自转ER和极移EP的修正.
在真春分点真赤道参考坐标系分析轨道倾角的周期运动,WGS84坐标系到真春分点真赤道参考坐标系的转换如式(10)所示
(10)
使用真春分点真赤道参考坐标系下位置、速度可以计算得到轨道参数的瞬根,经瞬平转换得到轨道参数的平根.所得到的真春分点真赤道坐标系下轨道倾角具有明显的半月周期,该特征与文献[12]所述的解析解特征吻合.
2.4 轨道衰减估计
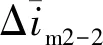
管道导航的输入均为瞬时的卫星定位信息和参考轨道采样点信息,通过管道导航能够实现轨道平均运动特征的获取.管道导航结果的一项重要参数是zc,即卫星与参考轨道相对运动轨迹的椭圆中心与虚拟编队原点的偏离情况,可以表征轨道衰减的情况,其变化率即为轨道衰减速率.使用轨道衰减率估计大气密度,结果如图12所示.目前,太阳活动周期正由低年至中年变化.比对表1所示的大气密度经验参数[15],遥测数据估计的大气密度符合当前太阳活动周期的变化特征.
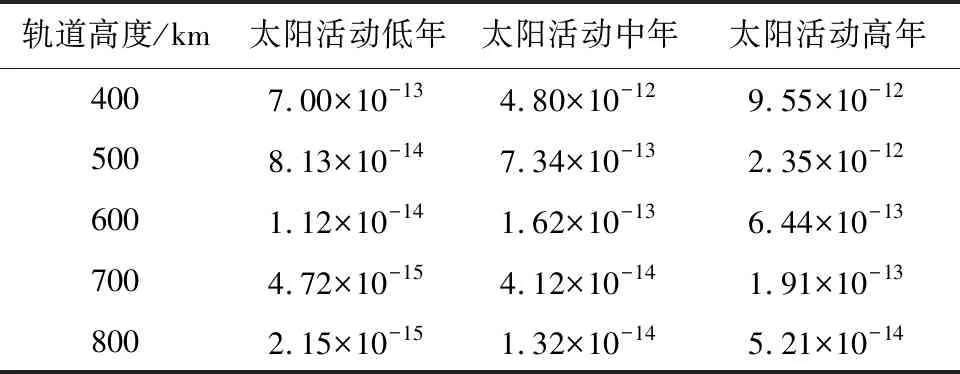
表1 大气密度经验参数/(kg/m3)
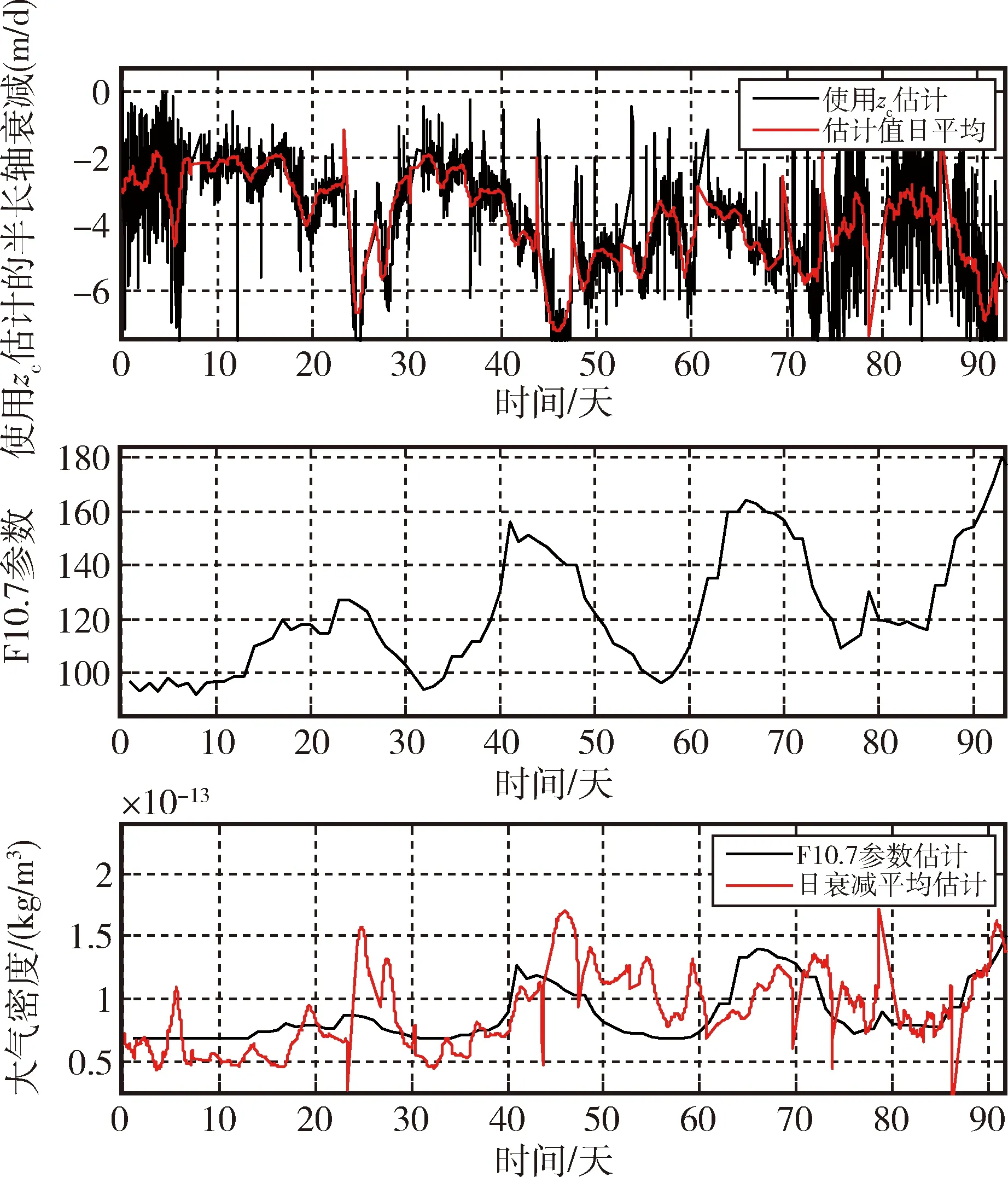
图12 轨道衰减率和F10.7参数以及大气密度估计
大气阻力引起的平均轨道根数的变化率如式(11)所示
(11)

大气密度的波动情况,体现为对基准大气密度的修正.选取2022年2月至2022年5月的在轨遥测数据和中国科学院国家空间科学中心的空间环境预报中心(http:∥www.sepc.ac.cn)发布的F10.7参数,进行数据分析.采样5次多项式拟合关于F10.7参数的大气密度修正参数[19-20],如式(12)所示
ρx(x)=A·[x5x4x3x2x11]T
(12)
其中,x为F10.7参数,多项式参数如式(13)所示
A=[5.54×10-11,-5.50×10-8,2.10×10-5,-0.003 8,0.32,-8.82]
(13)
假设当前轨道高度的基准大气密度为ρ0,满足ρx(t)·ρ(t)=ρ0.则以t*时刻大气密度为基准,后续时刻的大气密度ρ(t)取值如式(14)所示
(14)
使用遥测zc可以估计日均轨道衰减率,进一步结合卫星的面质比估计大气密度.遥测数据采样区间内,陆探一号卫星的轨道衰减日约2~8 m.同时,使用F10.7参数计算大气密度修正参数,并结合初始基准大气密度计算后续大气密度.2种大气密度的估算结果如图12所示.根据空间环境预报中心发布的F10.7参数,2种大气密度的估计结果的波动情况基本一致,验证了在轨衰减率估计的有效性.
3 结 论
本文基于陆探一号的在轨遥测数据,分析了入轨后3个月内卫星的在轨运动情况.绝对轨道参数的变化情况符合太阳同步回归特性和冻结特性,与地面设计的严格回归轨道特性基本一致,在轨设置了针对升交点赤经偏差和轨道面内相位偏差的偏置组合.管道导航算法的相位时间偏差确定精度优于5×10-4s,半长轴衰减的确定精度优于米级.基于遥测数据反演的轨道面内运动能够有效反映大气阻力导致的轨道衰减情况,反演得到的轨道面外运动能够辨识出由月球引力场摄动引起的半月周特征.
陆探一号提出的基于虚拟编队的管道导航,能够有效确定卫星相对于参考轨道的相位时间偏差和相对运动特征参数,其中由管道导航结果zc估计的轨道衰减率,其变化规律与实测的F10.7参数波动变化规律基本一致.