地空导弹抗拖曳式诱饵干扰制导律设计可行性分析
2023-11-13张敦絮杨锁昌
张敦絮,杨锁昌
(陆军工程大学石家庄校区, 石家庄 050000)
0 引言
单脉冲雷达是一种精密跟踪雷达,它以较高的测角精度、分辨率和数据率被广泛运用于地空导弹末制导中,对自卫式有源噪声干扰和无源干扰具有良好的抗干扰性能。人们对如何干扰单脉冲雷达进行了深入研究,根据单脉冲雷达无法从角度上区分雷达主瓣3 dB内的多点源目标这一特性,提出了很多针对单脉冲雷达制导体制地空导弹的干扰措施,其中拖曳式诱饵是针对单脉冲雷达设计的一种有效干扰形式。当诱饵和目标置于同一个雷达主波束内时,单脉冲雷达接收的回波信号是目标飞机回波和诱饵干扰信号的矢量和,这样导致功率质心偏离目标,使雷达导引头测角系统产生测量偏差,最终致使导弹不能有效跟踪目标,失去作战效能。
自20世纪90年代拖曳式诱饵问世,拖曳式诱饵经历了两代发展。第1代拖曳式诱饵等同于自主式干扰发射机,当拖曳式诱饵中的侦察接收器接收到雷达探测信号后,直接通过应答器将雷达探测信号放大并进行转发;第2代拖曳式诱饵采用了光纤拖曳线,提升了工作带宽和频率,当目标中的侦察接收器在接收到雷达探测信号后直接在载机在生成“欺骗”信号,再通过光纤控制诱饵发射干扰脉冲,对雷达导引头产生更强的欺骗作用。拖曳式诱饵干扰通过拖缆使诱饵与目标飞机连接,二者具有相同的运动特性,能够同时实现对雷达导引头的角度欺骗、距离欺骗以及速度欺骗,一般雷达导引头无法通过运动特性来区分目标和诱饵,进而造成显著的测角偏差。与干扰相对应的抗拖曳式诱饵干扰研究工作主要包括:拖曳式诱饵对雷达导引头测角影响、雷达导引头目标识别和导弹制导律优化等3个方面。
在研究拖曳式诱饵对雷达导引头测角影响方面:侯民胜等[1]基于单脉冲雷达角度跟踪系统的工作原理,通过计算机仿真研究了相干干扰参数对干扰效果的影响。赵兴录等[2]通过数学分析和仿真,分析了相干 (非相干) 拖曳式诱饵干扰对雷达导引头跟踪天线的指向角的跟踪误差。李潮等[3]通过建立目标反射信号和干扰信号模型分析拖曳式诱饵对单脉冲跟踪制导雷达的干扰特性,分析了雷达导引头接收回波信干比、目标导弹和诱饵张角以及干扰信号相位关系等因素对单脉冲雷达测角的影响。
在研究如何提升单脉冲雷达导引头目标识别能力方面:白渭雄等[4]利用信号脉冲前沿切割法、脉冲压缩技术和光电探测法进行目标识别。孙希东等[5]提出了提前分离谱线、频率捷变、前沿跟踪和增益突变的分析方法加强雷达导引头目标识别能力。针对雷达对单一信号特征识别率低的缺点,肖晶等[6]提出通过提取雷达回波信号中微动多普勒、极化和雷达截面积序列统计等多项特征,再进行两级贝叶斯数据融合,从而提高雷达对目标和拖曳式诱饵的识别能力。周必雷等[7]提出了基于稀疏重构的主瓣干扰抑制方法,抑制拖曳式诱饵的干扰效果,该方法通过重构干扰数据、消除干扰能量、估计残余干扰和目标的信息,有效地提取了目标在干扰环境下的距离和空间角度信息。杨和等[8]从目标和诱饵的空间特性出发,利用空间角分辨技术将目标和拖曳式诱饵分离。陈伯孝等[9]提出了基于目标回波与干扰信号极化特性差异的干扰抑制方法,建立了弹上单脉冲雷达全极化接收信号模型,给出了干扰极化参数的估计方法,并采用极化滤波对干扰进行抑制。杨成等[10]从主瓣干扰抑制的角度提出了一种自适应保形角度测量算法,可以实现对拖曳式诱饵识别和抑制。
在研究如何通过改良制导律提升地空导弹抗拖曳式诱饵干扰方面:张晓杰等[11]将非相干拖曳式诱饵与导弹运动相结合分析导弹雷达导引头在识别目标后跟踪目标的脱靶量,但没有考虑导弹进入临界条件时的入射角、攻角和侧滑角等运动参数对脱靶量的影响。刘德忠等[12-13]采用了前置点比例导引的制导律设计思想,该方法是使导弹雷达导引头精确跟踪拖曳式诱饵,根据拖曳式诱饵的运动参数估计目标的运动参数,并通过估计的目标参数对导弹进行制导。但前置点比例导引存在2个方面的不足:一是需要准确估算目标位置以及运动参数,这种方法易受各种误差影响,需要采用多种技术降低误差,难以工程实现;二是必须判断导弹是否受到拖曳式诱饵的干扰,如果目标没有释放诱饵,则会导致导弹跟踪虚拟目标。王凯琳等[14]认为当目标使用拖曳式诱饵时,目标对诱饵有遮挡作用,会在目标前方形成圆锥形盲区,使拖曳式诱饵失去干扰作用,并以拖曳式诱饵干扰的这一缺陷,设计了满足最小脱靶量和预期撞击角约束的比例制导律,以达到避免导弹雷达导引头被拖曳式诱饵诱偏的目的。这样设计的制导方法需要满足诸多假设条件,其中之一是目标不发生机动,而在实际对抗中目标为了有效利用拖曳式诱饵保护自身,会采取机动举措使目标、诱饵与导弹形成三角态势,达到诱偏导弹攻击的目的,地空导弹难以实现逆轨拦截目标这一假设。张志宏等基于高增益观测器完成了导弹-目标视线角旋转速率和目标运动加速度的估计,进而设计了具有视线角约束的制导律,从而使导弹进入拖曳式诱饵干扰的圆锥盲区[15],但仍不能回避目标不发生机动这一假设带来的问题。
提升地空导弹抗拖曳式诱饵干扰是一个复杂的系统工程,早期关于拖曳式诱饵对单脉冲雷达干扰原理的研究为地空导弹抗拖曳式干扰研究奠定了基础,当前众多研究人员致力于研究如何提升单脉冲雷达导引头目标识别能力以解决拖曳式诱饵干扰问题,而在优化制导律抗拖曳式诱饵干扰的研究工作相对薄弱,现阶段设计的逆轨拦截和前置点比例制导2种制导方式均存在明显的局限性,需要从新的方向和角度设计制导律,以达到在实际运用中通过制导律优化解决地空导弹抗拖曳式诱饵干扰问题。
1 拖曳式诱饵对雷达导引头测角静态分析
单脉冲雷达导引头根据从回波信号中提取目标信息的方式可分为振幅定向法和相位定向法,振幅定向法在地空导弹雷达导引头中应用广泛,该文以振幅定向法推导了拖曳式诱饵对雷达导引头角测量的影响。目标 (作战飞机) 通过雷达警告接收器检测到雷达探测信号后,面对地对空导弹袭击,飞行员一般采取释放诱饵举措,当导弹和目标到达一定距离时,飞行员通常会向左或向右急转弯,采取机动方式促使载机、诱饵和导弹形成“三角态势”,以到达有利利用拖曳式诱饵诱偏导弹的目的[16]。“三角态势”时目标和诱饵相对于导弹雷达导引头的关系如图1所示。
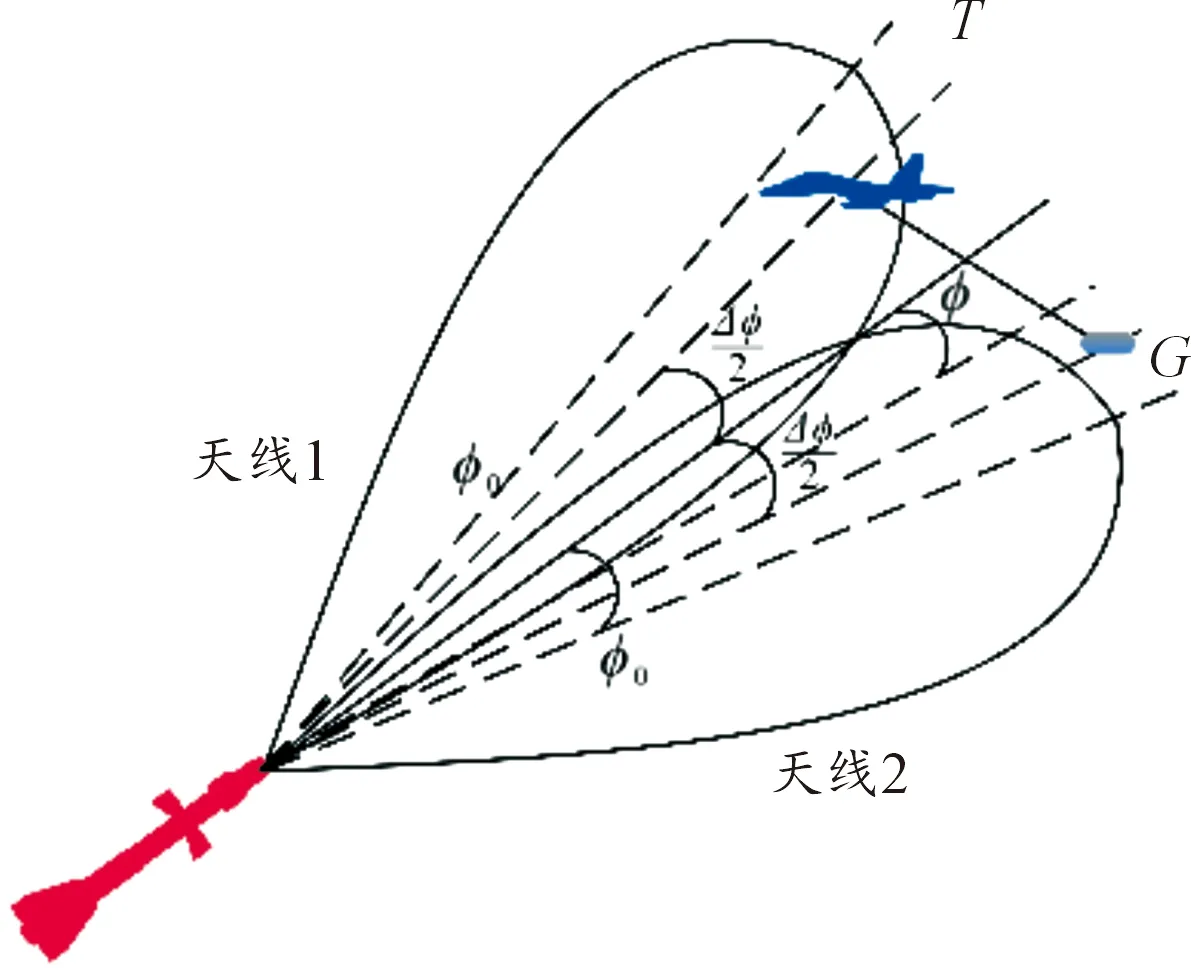
图1 单脉冲雷达导引头测角图
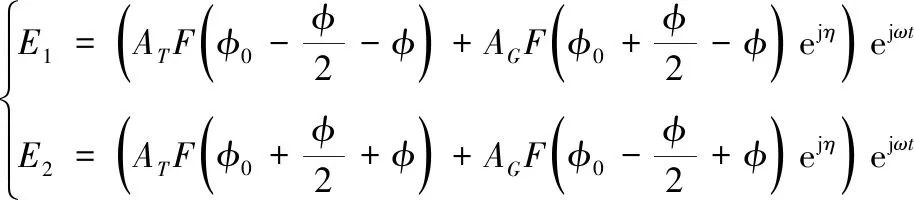
鉴于第2代拖曳式诱饵可以通过对接收到的雷达探测信号进行相位调制等技术处理而达到更好的干扰效果,本文中以相干干扰为例分析拖曳式诱饵对雷达导引头测角的影响。目标T,干扰G到达导引头雷达天线口面的信号有相位关系,相位差设置为η,幅度分别为AT、AG。雷达导引头的2个波速在水平方向相同,方向性函数为F(φ),相互叠加放置,相对于等信号线方向的夹角为φ0,雷达导引头天线接收到目标、诱饵两点源的信号分别为
(1)

(2)
设雷达导引头接收到的目标回波和拖曳式诱饵干扰信号信干比
(3)
经过和差网络得到E1、E2的和信号和差信号Es、Ed

(4)
同理Es、Ed经混频、中放、相位检波、低通滤波后的输出误差信号为

(5)
当误差信号S(φ)=0时,此时跟踪天线的指向角

(6)
当η→π时,式(5)简化为

(7)
可见,当a→1,η→π时,φ→∞,雷达导引头的实际测量角将远远偏离目标或诱饵。
2 拖曳式诱饵对雷达导引头测角动态分析
一般目标通过预警雷达在导弹跟踪之前释放诱饵,迫使导弹跟踪目标和诱饵的能量质心,逐渐形成目标、诱饵和导弹的三角态势,或者目标被导弹跟踪后释放诱饵,并采取机动(通常是横向机动)形成三角形态势,以达到诱偏导弹攻击的目的[17]。随着导弹目标之间距离的减小,目标和诱饵在导弹处的张角αf将逐渐增大,基于拖曳式诱饵对单脉冲雷达的干扰原理和单脉冲雷达的测角特性,这里引入临界角的概念,临界角是目标和诱饵即将离开雷达导引头主瓣时目标、诱饵与导弹间的张角。
2.1 基于临界角的雷达导引头测角分析
实际对抗中,空袭方采用拖曳式诱饵对来袭地空导弹实施相干干扰,使来袭导弹雷达导引头测角同时偏离目标和诱饵,以达到同时保护载机和诱饵的的目。拖曳式诱饵要实现对单脉冲雷达导引头的相干干扰需满足目标和诱饵均在雷达导引头主瓣内的前提条件。假设当雷达导引头视场内只存在一个点源信号,雷达导引头能够分辨目标和诱饵,随着弹目间距离减小,张角增大,当张角大于临界角时,雷达导引头视场内只会存在一个点源信号,此时雷达导引头具备了识别目标和诱饵的能力。在进入临界角之前,对于相干干扰,当张角小于临界角时,根据公式(6),理论上如果a→1,η→π时,φ→∞,雷达导引头测角将以较大角度偏离目标或诱饵,但实际空战中目标回波和诱饵干扰信号的相位很难保持恒定[16],φ对η值非常敏感,在进入临界角前,导引头测量角有时会偏离目标和诱饵连线之外,但大部分时间在两源连线之间,能量质心附近。当|φ|≤1/2φ时,随着张角αf逐渐增大至临界角,因雷达导引头主瓣范围限制,雷达导引头测角将指向目标和诱饵两源的连线,能量质心附近;当|φ|>1/2φ时,雷达导引头测角指向目标和诱饵之外,要实现对雷达导引头的相干干扰,导引头测量角不能超出雷达主瓣范围,即αf+φ≤φ,随着弹目距离减小,逐渐增大至临界角,φ逐渐减小,雷达导引头测角收敛至拖曳式诱饵。
2.2 基于临界角的弹目诱饵相对运动分析
文章通过临界角将导弹目标和拖曳式诱饵相结合建模,从导弹需用过载的角度分析导弹进入临界角时的运动参数对导弹进入临界角后制导控制的影响,鉴于目标通常采用侧向机动以形成三角态势,该文在侧向平面内分析了导弹、目标和诱饵的相对关系,如图2所示。
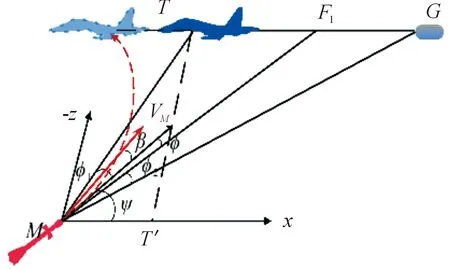
图2 临界角下侧向平面内导弹目标和诱饵的相对关系
在侧向平面内,T为目标,G为拖曳式诱饵干扰器,M表示导弹处于临界角的瞬时位置,F为目标回波和干扰信号能量中心,T′为目标在x轴方向的投影,VM为导弹速度在水平面内的分量,β为导弹侧滑角,ψ为导弹偏航角,φ为雷达导引头测角方向与雷达导引头电轴方向夹角,φ1为导弹-目标与雷达导引头电轴方向的夹角,φ2为导弹-诱饵与雷达导引头电轴方向的夹角,RMT为水平面内导弹至目标的距离,RMT′为水平面内导弹与目标在x轴投影的距离,RTT′为水平面内目标与目标在x轴投影的距离,l为拖曳线长度在水平面内的投影,临界角时导引头主瓣宽度φ=φ1+φ2。假定导弹具有稳定的跟踪能力,导弹雷达导引头电轴方向与导弹中纵轴方向一致。则

(8)

(9)
∠TGM=ψ-φ-φ2
(10)
(11)
RMT′=RMTcos(φ1+ψ-φ)
(12)
RTT′=RMTsin(φ1+ψ-φ)
(13)
(14)

(15)
可见,导弹进入临界点后跟踪目标需用过载与导弹进入临界角时的雷达导引头主瓣宽度、目标回波与干扰信号信干比、拖曳线长度、目标导弹速度、导弹侧滑角和偏航角等因素有关。
2.3 制导律设计抗拖曳式诱饵干扰可行性分析
假设目标释放诱饵后采取侧向机动达成三角态势后以200 m/s的速度向x轴反向飞行,拖曳线长度l=100 m[17],导弹导引头天线的波束宽度5°,导弹速度在水平面的投影VM=600 m/s,信干比a=1,因目标采取机动措施规避导弹进入逆轨拦截的35°锥形危险区[18],设置偏航角范围为20°≤ψ≤90°,为保证导弹气动舵效率,设置滑角范围0°≤β≤40°[19]。导弹进入临界角后导弹偏航角和侧滑角对追击目标所需过载结果如图3所示。由图得出如下结论:

图3 导弹进入临界角运动姿态对追击目标 需用过载的影响
1) 当导弹受到拖曳式诱饵干扰进入临界角时,导弹的侧滑角和偏航角对进入临界角后追击目标所需的过载均有影响。
2) 通过导弹目标相对运动关系可以看出,目标拖曳着诱饵进行侧向机动,可以使导弹进入临界角时的偏航角存在较大的变化范围,而目标要形成三角态势必然会通过机动增大目标-诱饵与导弹的夹角,这容易增大导弹偏航角的范围。从图3可知,随着导弹偏航角的增大,导弹所需过载变化相对平缓,即偏航角对导弹需用过载的影响迅速减小。临界角的引入不仅可以有效地应对目标机动对导弹跟踪制导的影响,而且可以有效地利用目标机动来克服逆轨拦截的严苛条件。
3) 导弹进入临界角后需用过载随侧滑角增大呈现出先减小再增大的过程。对于不同的偏航角,当侧滑角在12°~30°之间变化时,总是存在一个可以满足过载等于0的偏航角,较大的侧滑角有利于导弹进入临界角后的制导控制,但却不能同时解决目标机动造成的偏航角剧烈变化的问题,也会降低无拖曳式诱饵干扰时导弹的制导效率。在侧滑角为10°时,对于不同的偏航角均存在一个较小的导弹需用过载,对于此例将侧滑角设置在10°左右可以兼顾目标机动和目标是否使用诱饵对导弹制导控制的影响。
4) 通过制导律设计,使导弹以一定的侧滑角或偏航角攻击目标可以有效降低导弹进入临界角后的需用过载,提升导弹末端制导能力,从而将地空导弹对抗拖曳式诱饵干扰制导律设计转化为带有终端碰撞角约束的末制导律设计。
3 结论
针对拖曳式诱饵对地空导弹的干扰,本文中在现有拖曳式诱饵对单脉冲雷达干扰理论的基础上,通过引入临界角,将导弹末制导过程分为导弹进入临界角前和临界角后2个阶段。导弹进入临界角前,鉴于拖曳式诱饵相干干扰原理,随着张角αf逐渐增大至临界角,雷达导引头测角逐渐指向诱饵或回波能量质心,导弹只需根据雷达导引头测量角进行制导飞行,简化了导引头目标识别任务。导弹进入临界角后,分析得到包括雷达导引头主瓣宽度、目标回波与干扰信号信干比、拖曳线长度、目标导弹速度、导弹侧滑角和偏航角等影响导弹命中目标的参数,并仿真分析侧向平面内导弹进入临界角时的侧滑角和偏航角对导弹命中目标需用过载的影响,通过引入临界角,地空导弹对抗拖曳式诱饵制导律设计可以转化为带有终端碰撞角约束的末制导律设计,从而有效解克服轨拦截和前置点制导律的局限性。
