地铁牵引系统无速度传感器带速重投控制策略研究
2023-11-10赵雷廷李瑮冉王永
赵雷廷,刘 衎,李瑮冉,王永 翔
(1 动车组和机车牵引与控制国家重点实验室,北京 100081;2 中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081;3 北京纵横机电科技有限公司,北京 100094)
交流传动技术是实现地铁舒适稳定运行的基础。在现有牵引传动系统中常用的异步电机控制策略如磁场定向控制[1]、直接转矩控制[2]等皆依赖于电机高精度的速度实时采集。但是,由于速度传感器安装位置以及工作环境恶劣,再加上行车过程中振动带来的机械应力,其已成为车辆故障的主要根源之一。因此,针对无速度传感器控制技术的研究已逐渐成为电机控制理论和应用研究的热点方向[3-6],该技术不仅可减小牵引电机体积,提升电机输出功率,还可以提高整个牵引传动系统的可靠性并节约维修维护成本。然而在轨道牵引系统运行过程中,由于变流器瞬时过流、过压或长期惰行会出现变流器封锁后重新启动工况,而车辆具有大惯性特点,这就要求牵引系统可在较高初速度下平稳投入工作,即带速重投。如果初始辨识速度与实际速度偏差过大,则会触发系统过流、倒行等故障,既而无法正常工作[7]。
因此,带速重投一直以来都是无速度传感器控制技术工程实现的关键技术难题。目前,地铁部分车型网络协议中牵引系统可以通过车辆网络接收到其他系统例如制动控制系统(Brake Control Unit,BCU)检测的车辆速度从而作为初始速度进行重投,初始误差较小,重投相对简单;但是亦有部分车型网络协议中没有其他系统检测的车辆速度发送至牵引系统,或者当前车辆正处于应急牵引工况即没有网络时,就需要研究如何快速准确地推算电机初始速度的方法。近几年,国内外众多科研院所及高校针对上述问题提出了相应解决措施,其中文献[3]直接利用全阶转子磁链观测器进行重投,初始速度偏差大,系统易发生震荡;文献[8]利用优化自搜索方法估计出断电后的电机转速,通过重复搜索使估算转速越来越接近实际转速,进而提高了重投的成功率,但搜索时间较长,对系统动态响应有一定影响;文献[9]提出了一种基于转子反电动势非线性模型的输入输出线性化方法,重投过程中可以准确快速地辨识电机转速,但由于非线性模型建立忽略定子电流变化导致辨识转速不准确,最终使得重投失败。
文中以闭环全阶转子磁链观测器为基础,在确保初始速度辨识精度的条件下,提升系统启动工况下的动态响应性能,提出一种直流脉冲注入结合磁链锁相环以及零转矩修正的两段式带速重投策略,最终通过硬件在环仿真与地面对拖试验验证证明该策略的有效性。
1 异步电机无速度传感器控制策略
文中采用数字信号处理器(Digital Signal Processing,DSP)+现场可编程门阵列(Field Programmable Gate Array,FPGA)的系统构架实现基于无速度传感器控制技术的高性能异步电机矢量控制算法,如图1 所示。

图1 基于无速度传感器控制技术的电机矢量控制算法框图
控制系统中DSP 接收车辆网络系统发送的转矩指令Te_ref,结合磁链给定值ϕref计算得到转矩电流给定值iq_ref;励磁电流给定值id_ref则直接利用磁链给定模块获取;转矩与励磁电流经过双电流PI调节器输出电机电压补偿量udpi、uqpi,与前馈电压计算模块输出的电压ud_ref、uq_ref相加之后,通过电压矢量计算模块输出电压矢量在dq旋转坐标系下的矢量角度θdq以及调制度m;其中dq旋转坐标系下的电压矢量角度与观测器估算的解耦角度θob相加得到静止坐标系下的实际电压矢量角度θs,其与FPGA 中角度积分模块输出的电压矢量积分角θf一同作为相角PI 调节器的输入,进而通过输出频率ωθ实时对定子给定频率值ωe进行补偿,既而弥补系统数字延时误差,最终得到的定子频率给定值发送给FPGA 完成角度积分以及PWM 脉冲生成功能;同时调制度m发送给FPGA 完成电压重构以及PWM 脉冲生成功能。
控制算法中定子频率计算模块、前馈电压计算模块所用的观测频率以及相角调节器、电流变化模块所用的观测解耦角度都来源于磁链观测器及速度辨识模块,该模块的输入为静止坐标系下电机电流与电机电压。其中电机电流为传感器采集后经过Clark 变化得到,电机电压则通过FPGA中电压重构模块计算得到。
为实现无速度传感器控制技术,磁链观测器及速度辨识模块首先面向感应电机进行建模,根据等效电路得到异步电机两相静止坐标系下状态方程为式(1)~式(6):
式 中:is=[isα isβ]T为异步电机定子电流;ϕr=[ϕrα ϕrβ]T为转子磁链;us=[usα usβ]T为定子电压;Rs、Rr、Ls、Lr、Lm、ωr分 别 为 电 机 定 子 电 阻、转子电阻、定子电感、转子电感、励磁电感、转子角频率。
在上述状态方程变量中,实际应用场合只有定子电流可直接测量,因此通过定子电流实际值与观测值之间误差构成转速自适应率及反馈增益矩阵来获取转速观测值并修正转子磁链观测值,最终构建闭环全阶转子磁链观测器方程为式(7)~式(8):
其结构如图2 所示。

图2 闭环全阶转子磁链观测器结构
由于电机模型的极点本身是稳定极点,因此为提高观测器收敛速度,设计观测器极点为电机模型极点的k倍,从而得到反馈增益矩阵系数为式(9):
文章采用PI 自适应率完成转速估算为式(10):
2 基于磁链锁相环的带速重投策略
为实现基于无速度传感器控制技术的牵引变流器可以在车辆运行过程中随时激活投入,文中提出一种基于两段式的带速重投策略,实现快速准确的推算电机初始速度。
首先通过发送特定的PWM 脉冲进行直流预励磁,从而初步推算出当前车辆速度值,并将其作为第2 阶段的输入,在第2 阶段中将给定转矩设置为0,既而利用实际观测转矩与给定转矩之间的误差来进一步微调转速推算值,并将结果作为正常转速观测算法的初始值,即闭环全阶转子磁链观测器开始发挥作用,最后通过上文设计的转速自适应率快速、准确、实时地观测车辆当前实际转速。
2.1 直流预励磁阶段
在惯性行驶的感应电机中通入直流电流时,得到的转子磁链将画出一个圆轨迹,其转动角频率与感应电动机的转动角频率相同。通过设定静止坐标系下定子电流β轴分量为0 即isβ=0,从而得到简化后的电机状态方程为式(11):
式 中:isα和isβ分 别 为α、β轴 定 子 电 流;ϕrα和ϕrβ分别为α、β轴转子磁链。通过求解方程得到该模式下磁链表达式为式(12):
可以看出转子磁链实际上是由直流分量加上一个逐渐衰减的交流分量得到,而其中的交流分量角频率与电机实际旋转频率一致。在转速未知的情况下,无法通过减去直流分量得到交流分量。
鉴于此,文中采用无需转速信息的电压模型磁链观测方法获取这个阶段的转子磁链信息,然后以转子磁链定位于旋转坐标系d轴为基础,通过设计软件锁相环得到转速初始值。具体实现方式如图3 所示。

图3 直流注入转速观测控制框图
第1 阶段首先将反馈转速即实际电机转速默认为0,此外,转矩电流给定值维持0,励磁电流给定值为常量,固定解耦角度恒为30°,实现双电流PI 闭环控制,输出调制度和定子频率给定值,FPGA 计算得到PWM 驱动脉冲,变流器在驱动脉冲的控制下实现向电机进行直流电流注入。
此时,DSP 内部采用电压型磁链观测器获取当前阶段的转子磁链并将其作为磁链锁相环的输入。
磁链锁相环基于磁场定向原则,通过PI 调节将q轴磁链调至0,从而最终获取当前阶段观测转速,并将其作为第2 阶段的输入。
2.2 零转矩调节阶段
在第1 阶段的基础上,第2 阶段通过设置转矩指令值为0 进行修正初始转速,该阶段采用基于图1 的无速度传感器矢量控制构架,同时根据电压型转子磁链观测器输出的转子磁链以及实际定子电流推算出当前实际转矩为式(13):
如果当前观测转速大于实际转速,将处于牵引状态,那么产生的实际转矩大于0;如果观测转速小于实际转速,将处于制动状态,产生的实际转矩将会小于0。因此,文中利用公式推算出的转矩误差来修正观测转速,原理如图4 所示。
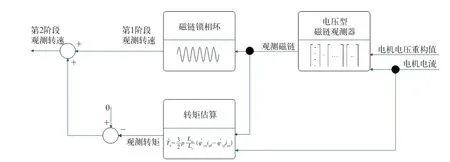
图4 零转矩调节转速观测控制框图
至此,通过2 种模式的组合,实现高精度且短时间的速度推算,为后续基于无速度传感器控制的矢量控制算法提供转速初始值,确保了短时间内带速重投的成功。
3 硬件在环仿真测试
针对上述研究内容首先通过搭建硬件在环半实物平台进行仿真测试。
4 动2 拖的地铁牵引传动系统整车硬件在环仿真系统如图5 所示。其采用基于以太网的分布式构架,由模拟显示系统、地铁车辆实际牵引控制单元(Traction Control Unit,TCU)、实时仿真系统、信号处理系统及数据采集系统组成。

图5 地铁牵引传动系统整车硬件在环仿真系统
其中,模拟显示系统用于模拟车辆司控台及车辆网络控制功能。实时仿真系统则包括:4 台运行电机、变流器、直流回路模型的仿真机以及2 台运行弓网及轮轨关系模型的仿真机,并通过反射内存实现仿真机之间数据传递和时间同步。此外,设计信号处理系统完成仿真机与TCU 之间信号转换。利用数据采集系统获取系统数字量和模拟量,并发送至上位机进行储存和显示。
仿真异步电机参数见表1。
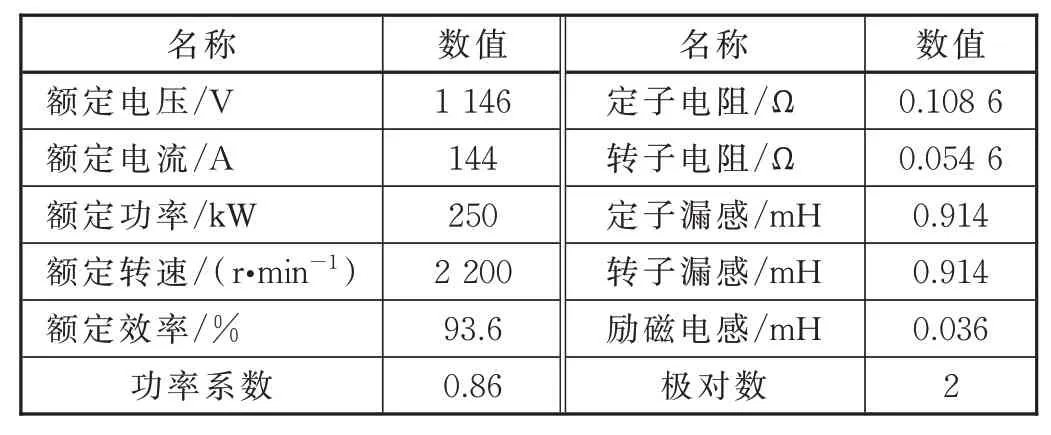
表1 电机参数
基于无速度传感器控制技术的异步电机启动-牵引-制动-停止全过程电机三相电流、电机转矩以及电机转速波形如图6 所示。在电机启动时刻相当于0 速度点的带速重投,可见观测转速可以快速跟踪实际转速,且偏差随速度增加而逐渐减小,同时,电机实际转矩可以跟随指令转矩,全过程电机电流平稳,无异常突变。

图6 无速度传感器控制下电机动态运行工况
电机分别运行于5 Hz 以及45 Hz 稳态下,电机三相电流、电机转矩以及电机转速波形如图7 所示。可以看出速度辨识误差均可控制在0.05 Hz之内,实际转矩准确跟踪指令转矩,电流平稳,系统稳态性能良好。

图7 无速度传感器控制系统稳态性能
电机运行于60 Hz 速度点,分别进行牵引和制动工况下的带速重投如图8 所示。仿真结果从上至下分别为电机三相电流、电机转矩、电机转速、第1 阶段锁相环输出转速以及系统状态标志(0 表示系统封锁状态、1 表示带速重投第1 阶段、2 表示带速重投第2 阶段、3 表示正常运行状态)。

图8 无速度传感器带速重投性能
可以看出系统从封锁状态进入第1 阶段之后,电机三相电流为直流,经过100 ms 之后输出初始转速作为第2 阶段的输入。第2 阶段维持300 ms,转矩指令值为0,辨识转速经过进一步调整之后,系统进入正常运行状态。整个带速重投过程约400 ms 完成,电流及转矩无明显冲击,动态性能良好。
4 地面对拖试验验证
文中搭建的地面对拖试验平台如图9 所示,整流器为牵引变流器(Tractor inverter,INV1)和牵引变流器(Tractor inverter,INV2)提供直流电源,牵引电机作为被试电机工作于无速度传感器控制模式,负载电机作为陪试电机工作于有速度传感器下控制模式,电机间通过联轴直接相连,并利用转矩测量仪获取实际转矩信息。最后通过控制负载电机转差大小,从而调整负载转矩。试验用电机参数与仿真用电机参数一致。

图9 对拖试验系统
基于无速度传感器控制技术的牵引变流器同时驱动4 台异步电机分别进行牵引和制动工况下的速度扫描波形如图10 所示。整个过程电机电流平稳,转矩发挥正常,速度稳定。
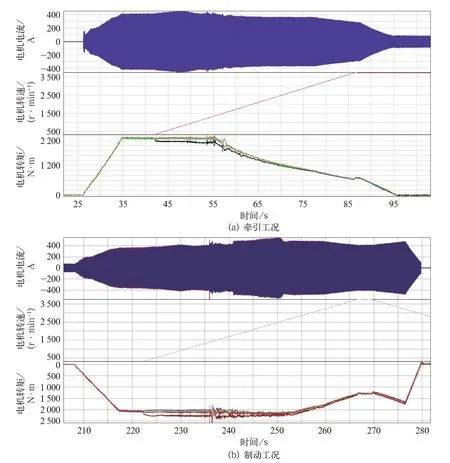
图10 无速度传感器控制模式下速度扫描波形
电机分别运行于312 r/min(10.4 Hz)和3 124 r/min(104 Hz)左右下波形如图11 所示。可见电机电流、转速及转矩平稳无异常波动,系统稳态性能良好。

图11 无速度传感器控制系统稳态试验
为验证带速重投控制策略在全速度范围内的有效性,分别进行了电机运行于低速区段312 r/min(10.4 Hz)、中速区段1 564 r/min(52.1 Hz)以及高速区段3 747 r/min(124.9 Hz)的带速重投试验,如图12 所示。

图12 无速度传感器稳态带速重投试验
可以看出系统在各速度区段性能优异,效果与仿真测试基本一致,带速重投算法在约400 ms内完成初速度估算使系统进入正常运行模式,整个过程电流及转矩冲击在较小的许可范围内。
在电机加速过程中的带速重投试验结果如图13 所示,可以看出系统依然可以在较小的电流与转矩冲击下完成激活过程进入正常无速度传感器运行模式。
5 结 论
文中以闭环全阶转子磁链观测器为基础,实现了基于无速度传感器控制技术的电机矢量控制策略,并提出了一种直流脉冲注入结合磁链锁相环以及零转矩修正的两段式带速重投策略。通过硬件在环仿真以及地面对拖试验完成了针对该系统的速度扫描、稳态运行、动静态重投等仿真测试及试验验证,从而证明该无速度传感器控制系统具有良好的动静态性能,并且可以在较小电流、转矩冲击下快速完成带速重投过程,已达到工程化应用要求。
