基于VR 技术的焊接机器人虚拟仿真系统★
2023-11-10郇新,周卫
郇 新, 周 卫
(潍坊工程职业学院, 山东 青州 262500)
1 研究意义与必要性
虚拟仿真技术起源于美国,其中英美等国家研究水平较高。Heginbothm 开发了“Sammie”机器人仿真程序,在仿真程序中使用虚线轮廓表示机器人模型,采用点到点运动方式,能够使机器人按照连续轨迹运动。美国通用公司开发了“SDRC”机器人仿真系统,该系统具备工业机器人离线仿真功能。美国Maryland大学开发了“DYNAMAN”软件包,该软件包包含动力学模型,可以根据机器自动生成F0RTRAN 仿真程序。随着工业机器人技术发展,一些知名工业机器人企业开始专门针对自己开发产品的工业机器人仿真软件,比如ABB 公司的RobotStudio 工业机器人仿真系统和德国KUKA 公司的Sim Pro 工业机器人仿真系统。
近年来,我国也出现了一些优秀的工业机器人仿真软件。如清华大学开发了一款“PCROBSN”工业机器人仿真系统,包含多种工业机器人系统,仿真多种工业机器人[1]。华航唯实开发了“RobotArt”机器人离线仿真软件,该软件可以根据自动生成机器人运动轨迹,进行机器人轨迹仿真,根据轨迹生成运行动画[2];上海交通大学开发了“ROSIDY”机器人仿真软件,该软件使用AutoCAD 平台,该软件突出了机器人图形仿真,实用性强[3]。同时,国内知名大学、中科院自动化研究所、国产知名机器人企业也纷纷开始了工业机器人仿真技术的研究。
当前工业机器人仿真软件大多采用计算机仿真方式,缺少沉浸式虚拟仿真软件;当前工业机器人仿真软件只能在计算机上仿真工业机器人运行轨迹,不能将焊枪的位置和角度转换到虚拟场景中,不能模拟焊接过程的电弧闪烁、金属熔化、焊缝形成等焊接过程,不能捕捉机器人速度、焊接电流、焊接电压、焊接角度等参数,无法分析焊接质量。因此,本文针对焊接机器人实训和工程运用所需,开展的基于VR 技术的焊接机器人虚拟仿真系统的研制工作,对工业机器人技术发展有着重大意义。
2 主要研究内容
2.1 研究目标
本文主要研究基于VR 技术,利用Unity 3D 平台,将虚拟现实技术和焊接虚拟仿真平台有机融合,从教学培训和实际应用两个角度出发,开发一款焊接机器人虚拟仿真系统。
2.2 研究内容
1)焊接机器人虚拟仿真系统平台搭建。本系统平台主要由软件系统和硬件系统组成。其中,软件系统我们选用了技术比较成熟的Unity 3D 平台,来生成VR 场景,操作工业机器人设备,反馈场景信息[4];硬件系统主要包括头盔、上位机、虚拟现实设备、支撑平台、模拟焊枪等。
2)工业机器人及关键部件三维建模。使用Solid-Works 软件对工业机器人及关键零部件进行建模。其中考虑到工业机器人的关节运动仿真,将工业机器人分为底座、前臂、手部等六个部分,分别进行建模。针对关键部件包括焊枪、焊接工作台、焊接工件等进行1∶1 仿真建模。由于SolidWorks 软件生成的文件不能直接导入unity 3D,我们利用3D max 软件进行优化后导入Unity 3D 中(如图1 所示)。
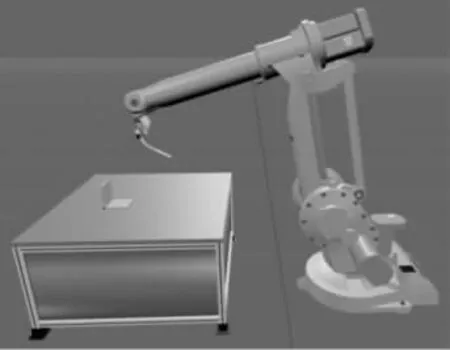
图1 焊接机器人VR 虚拟仿真图
3)人机交互界面设计。良好的人机交互界面直接关系到用户的体验,另外考虑到功能完善要求,我们将界面分为网络连接、人物视角、状态转换、工业机器人工作状态、工业机器人关节速度、工业机器人运行控制等。
4)仿真系统与焊接虚拟仿真实训平台同步。工业机器人、焊接工件等三维模型与实际物体均为1∶1的真实尺寸,可以通过控制界面实现旋转、缩放等功能,方便使用者从不同角度观察机器人的运行状态。仿真系统与焊接虚拟仿真训练平台进行通信,保证仿真系统与焊接虚拟仿真训练平台的同步。焊接虚拟仿真平台根据机器人速度、焊接电流、焊接电压、焊接角度等参数,通过算法自动生成模拟焊缝信息,生成焊接质量报告,并反馈给虚拟仿真系统。
3 研究方法和技术路线
本文研究技术路线如图2 所示。
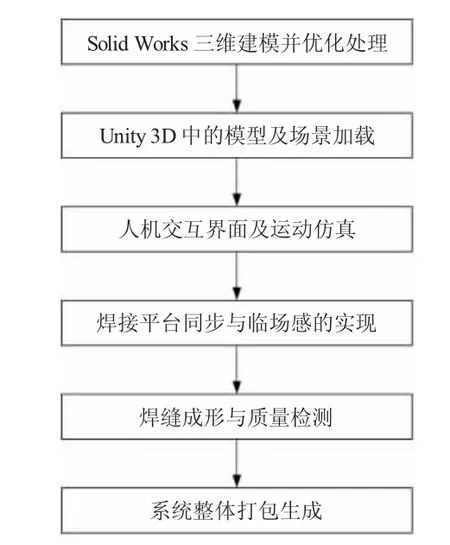
图2 研究技术路线
3.1 三维建模及优化处理
使用SolidWorks 软件对工业机器人及关键零部件进行建模进行1∶1 仿真建模。由于SolidWorks 软件生成的文件不能直接导入unity 3D,我们利用3D max 软件进行优化后生成FBX 格式文件,方便导入unity 3D 中使用。
3.2 模型及场景加载
将3D max 软件导处的FBX 格式文件,导入到Unity 3D 中,生成可以供Unity 3D 使用的模型文件。将模型文件加载到Unity 3D 场景中,使用语言控制脚本,就可以控制它们的运动了。
3.3 人机交互界面设计及运动仿真
在Unity 3D 软件中使用C# 语言编写机器人运动控制程序;使用“VisualStudio”集成开发工具包,开发人机界面,有效提高人机界面的开发效率。将VR手柄传感器加入模拟焊枪中(如图3 所示),通过感知模拟焊枪的运动来确定机器人的路径[5]。

图3 模拟焊枪
3.4 焊接平台同步与临场感的实现
为验证使用者机器人焊接质量,我们将仿真程序与实际的虚拟焊接平台连接,将仿真参数与仿真结果等数据进行共享,产生使用者焊接质量报告[6]。加入真实机器人焊接工作场景中的声音、电火花、烟雾等效果,改善6 轴工业机器人运动算法,提高工业机器人运行仿真度,进一步提高系统的临场感。
3.5 焊缝成形与质量检测
操作系统与焊接虚拟仿真培训平台相连接。焊接虚拟仿真平台根据焊接电流、焊接电压、焊接角度等参数,结合模拟焊枪的移动位置、速度、角度等参数,自动生成焊缝(如图4 所示),并生成焊接质量报告。
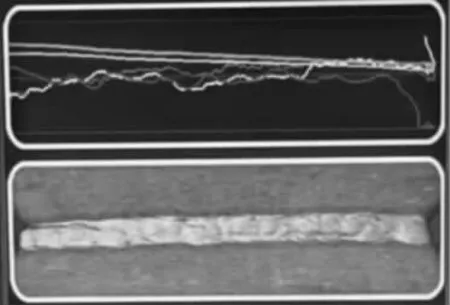
图4 生成焊缝
4 虚拟仿真及其结果展示
4.1 虚拟仿真使用
当操作人员使用虚拟仿真软件时,软件会利用VR 模拟焊接手柄中的多个传感器,将系统将实时获得焊枪的位置和姿态,在仿真软件中焊枪和焊缝的仿真图(如图5 所示)。
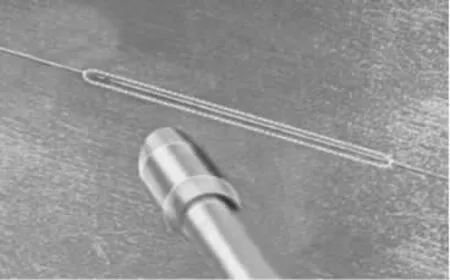
图5 焊枪和焊缝仿真图
根据工件的加工位置及要求,在仿真系统中手动设置焊接电流、电压、焊接速度、保护器等参数,焊接过程中,操作人员需要将VR 焊枪运行到具体位置,实时采集焊缝数据,仿真软件会转化成虚拟仿真数据,将数据进行分析和处理,在显示屏上将会形成具体的焊接数据,如表1 所示。
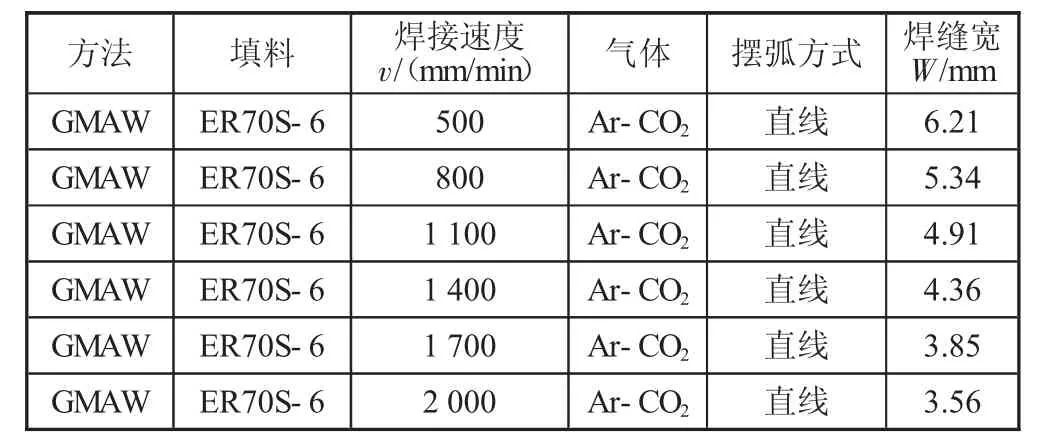
表1 虚拟仿真软件生成数据
4.2 真实场景中焊缝展示
我们使用真实的ABB1400 机器人焊接工作站,设置焊接电流、电压、焊接速度、保护气等参数与虚拟仿真软件一致,测试焊接机器人的焊接参数,记录焊接机器人焊接数据如表2 所示,当焊接电流逐渐增加时,单位距离热输入稳定增加,焊缝宽度则逐渐增加。
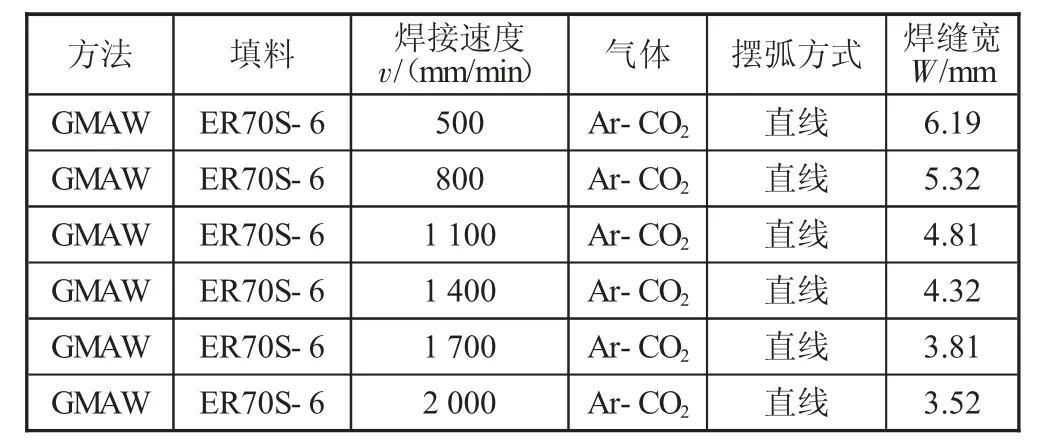
表2 焊接机器人焊接实际数据
5 主要创新点、先进性
5.1 安全、高效开展焊接机器人培训和工程应用
该系统采用虚拟仿真方式,消除了焊接过程中强光、高温、烟雾等危险元素,帮助使用者安全进行使用。消除初学者设备安全规范使用障碍,帮助初学者快速、真实地进行焊接机器人培训。培训过程中节约了焊接耗材,降低设备使用功耗,节能环保性能突出。可以方便地进行不同焊接工件的工业机器人焊接模拟,增加最新工业机器人焊接技术,提高培训效率。
5.2 使用VR 虚拟现实技术,提高了操作的真实感
该系统使用VR 虚拟现实技术,使用者可以从第一人称视角出发,360°全方位进行观察,代入感强。还可以针对画面进行旋转、缩放等操作,方便使用者从最佳角度观察机器人。它具有模拟焊接机器人的操作、焊接各类工件的焊接、焊缝模拟成形、焊缝质量检测等功能,使操作者能够直接观察机器人焊接的全过程,提高操作的真实感。
5.3 高精度焊接质量报表生成,真正提高焊接机器人操控水平
仿真系统与焊接虚拟仿真培训平台相连接。该算法根据机器人速度、焊接电流、焊接电压、焊接角度等参数,高精度生成模拟焊缝,同时生成焊接质量报告。通过焊接质量报告为培训和工程应用人员提供数据,调整焊接机器人的运行速度、参数设置、运行轨迹、焊枪角度,真正提高焊接机器人的控制水平。
6 结语
本文基于VR 技术设计的焊接机器人虚拟仿真系统,通过对比可以看出虚拟仿真软件生成的焊缝与实际焊缝基本相同,这样操作人员在虚拟仿真软件中练习,仿真软件会分析操作人员在虚拟焊接过程中出现的问题。通过不断的改进,使操作人员不断增加操作技巧,掌握焊接工艺和方法,为后续从事焊接工作打下坚实基础。