高地隙四轮独立驱动喷雾机路径跟踪与防侧翻控制
2023-11-09刘国海王子杰
刘国海, 张 贺, 张 多, 沈 跃, 王子杰
(江苏大学 电气信息工程学院, 江苏 镇江 212013)
目前,我国高度重视智慧农业的发展,其中,2020年“中央一号文件”提出,要加快大数据、人工智能、智慧气象等在农业领域的作用,并且在《中华人民共和国国民经济和社会发展第十四个五年规划和2035年远景目标纲要》中提出,加强大中型、智能化、复合型农业机械研发应用[1].其中在农业装备方面,目前绝大多数传统的农机装备采用的均是有人驾驶,前轮转向,转弯半径大,在转向时前后轮的压痕不在同一条直线上,在作业时容易出现压苗等情况.无人驾驶农机装备利用高精度卫星定位、激光雷达等技术可实现作业时全程无人操作,缓解了劳动力紧缺的现状[2].通常农机装备具有体积大、质量大、质心高等特点,作业环境恶劣复杂,尤其在丘陵、坡地、水田等极端作业环境时易发生侧翻.因此及时预测农机的侧翻趋势,主动对农机进行修正十分必要.无人农机行驶的安全性和路径跟踪的精度问题是研究的重点,其中在路径跟踪控制方面有多种控制算法如模型预测控制算法、纯跟踪算法、线性二次调节器(LQR)算法、Stanley算法等[3].在行驶安全性控制方面,主要考虑喷雾机的侧倾等问题.近年来,国内外的学者针对路径跟踪问题以及侧倾控制进行了深入的研究.文献[4]提出了一种协调的纵向和横向运动控制系统,同时控制车辆纵向速度和偏航率并且跟踪其参考轨迹.文献[5]通过粒子群优化进行轨迹优化,并且产生了一个成本较低,收敛速度较快的轨迹修正量,有效应用于约束轨迹优化问题.文献[6]采用群粒子优化来进行轨迹跟踪,利用人工势能来解决防侧翻问题,控制算法可使农机安全平稳地行驶.文献[7]为减轻延时对车辆稳定性控制的不利影响,设计了一种新型三维动态稳定控制器,其可以在复杂的转向动作中实现横向稳定性和防侧翻控制.文献[8]提出了一种由参数识别方法、惯性传感器、速度计和嵌入式控制器组成的翻车和倾覆检测系统,可以使横向荷载转移率(LTR)达到所设置的阈值之前提前做出控制,实现防侧翻控制.文献[9]提出了一种使用差速制动设计车辆防侧翻系统的方法,使用横向荷载转移率作为侧倾判断指标并设计了基于主动转向的侧翻控制器来使这个指标满足一定水平以下.上述文献仅仅考虑了车辆的路径跟踪问题或者单独考虑了车辆的防侧翻控制,并且没有考虑在复杂路面上作业时的工况.因此,在考虑无人驾驶喷雾机核心研究问题时既要考虑路径跟踪的精度又要考虑喷雾机的安全行驶问题.针对上述问题,提出一种适用于农机装备的新型的前-后双转向轴的4WID驱动底盘结构,并以此为基础,设计了一台4WID电驱动的高地隙喷雾机,如图1所示.喷雾机具有前、后两个转向轴,在前后转向轴之间加入了液压推杆,在转向过程中可以用于辅助转向[10].在此基础上,文中采用分层控制,上层采用模型预测控制实现对路径的跟踪,下层采用防侧翻控制来保证喷雾机行驶的安全性.

图1 无人驾驶高地隙喷雾机
1 喷雾机的运动学模型
喷雾机的运动学模型主要是通过几何学的关系来研究喷雾机的行驶状态,包括喷雾机的速度、转向角等随时间的变化.由于喷雾机在作业时速度较低,仅考虑车辆的路径跟踪问题和防侧翻问题,采用运动学模型可以使模型不受车辆不确定因素的影响,使模型预测控制器具有较好的控制精度.根据喷雾机的底盘结构可得出喷雾机的运动学关系如图2所示.

图2 喷雾机运动学关系
根据Ackermann-Jeantand 转向原理[11],可得喷雾机4个轮速与转向角之间的关系:
(1)
(2)
(3)
(4)
式中:α为喷雾机的前轴转向角;β为后轴转向角;a、b为前后转向桥到车辆质心的距离,在理想转向情况下a、b相等;W为左右轮距;V为喷雾机的纵向速度.
通过对喷雾机运动学模型分析可得出喷雾机在全局坐标系下的状态空间方程:
(5)
(6)
(7)
式中:φ是喷雾机的航向角;δf是喷雾机的前轮转向角;l是喷雾机车身长度.选取喷雾机的状态量x=[X,Y,φ]T,控制量u=[V,δf]T,喷雾机的状态空间方程可写为
(8)
为了简化模型,选取参考状态xref,通过泰勒公式在xref处展开,可得到关于状态量x误差的状态空间方程:
(9)
(10)
式中:A、B是f关于x、u的雅克比矩阵.
通过前向欧拉法(Forward-Euler)将上式离散化,加入采样时间T,离散化后的状态空间方程如下:
(11)
整理可得
(12)
(13)
2 轨迹跟踪与防侧翻控制
采用分层控制的方式来实现喷雾机的轨迹跟踪控制与防侧翻控制,其控制框图如图3所示,上层采用的是模型预测控制(MPC),根据喷雾机的当前状态以及期望路径来输出喷雾机的期望转向角以及车速,实现轨迹跟踪控制.下层控制器通过引入横向荷载转移率(LTR)作为衡量侧倾的指标来判断车辆状态是否产生侧倾,通过引入模糊控制器来对转向角进行补偿,进而控制LTR稳定在某一阈值,实现防侧翻控制.
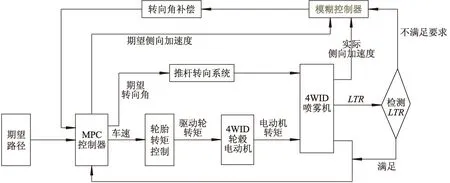
图3 整车控制系统框图
2.1 防侧翻控制
在复杂的作业环境下,喷雾机在轨迹跟踪的过程中可能会产生侧翻的危险,因此在保证轨迹跟踪精度的前提条件下要保证车辆行驶的安全性.
2.1.1侧倾稳定性动态评价指标
在衡量喷雾机车身状态的时候,有很多参数可以衡量车身的侧倾程度,其中包括:侧倾角、侧向加速度、轮胎垂直载荷、横向荷载转移率等[12].由于横向荷载转移率可以更直观地反映出车身的倾斜程度,所以采用横向荷载转移率作为侧倾稳定性指标[12],其定义如下:
(14)
式中:Fzl、Fzr分别为左、右侧轮胎的垂向载荷.
喷雾机整车受力如图4所示.根据喷雾机整车受力分析,写出如下力矩平衡方程:
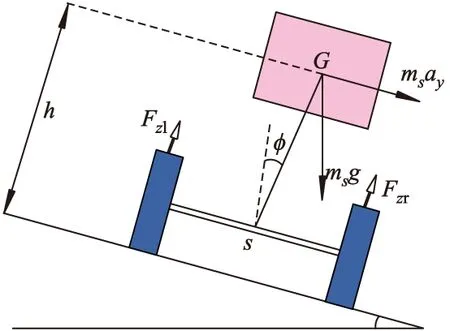
图4 喷雾机整车受力图
(15)

将式(15)代入到(14),可得
(16)
由此可以看出横向荷载转移率与侧向加速度以及侧倾角有关,可以一起用来广泛描述车辆的侧倾稳定性.由于喷雾机整体结构为刚体所以其侧倾角主要由路面参数决定.因此车辆的横向荷载转移率主要与侧向加速度有关.
根据喷雾机车辆模型,设其侧向加速度对前轮转角的增益为Gay[13],则前轮转角增益与车速的关系如下:
ay=Gayδf,
(17)
(18)
(19)
式中:kf为喷雾机前轮侧偏刚度;kr为喷雾机后轮侧偏刚度;lf为喷雾机前轮轴距;lr为喷雾机后轮轴距;i为转向传动比.
由上述公式可知喷雾机实际侧向加速度ay可以用当前前轮转角与当前车速表示,而横向荷载转移率主要由侧向加速度决定,减小侧向加速度可以有效降低喷雾机的横向荷载转移率,防止侧倾情况的发生.因此可以采用模糊控制来确定转向角的补偿值,使得喷雾机的横向荷载转移率稳定在某一安全阈值.
2.1.2防侧翻控制策略
在行驶过程中为了对喷雾机进行有效的防侧倾控制,需要先判断喷雾机当前的运动状态,即通过侧倾指标来判断和预测侧倾是否发生,是否需要采取相应的防侧倾控制.
可以通过横向荷载转移率来判断喷雾机的侧倾情况.其中LTR的取值范围是-1到1,|LTR|在0到1变化,当喷雾机两侧车轮的垂直载荷相等时,横向荷载转移率为0,是一种理想的状况,当LTR越接近1时,说明产生侧倾的可能性就越大,当LTR=1时,喷雾机一侧车轮着地,已产生侧倾.因此要保证|LTR|较小才能使车辆的侧倾稳定性较好.在侧倾指标阈值设置时,设置值不宜过大也不宜过小,如果设置过小可能会来回切换侧倾控制器,使其横向偏差波动较大,影响路径跟踪精度.如果设置值过大,控制器可能没有足够的响应时间,使其产生侧倾的危险.考虑到农田道路环境复杂,通过多次仿真测试,最终将喷雾机行驶时的安全横向荷载转移率阈值设为[-0.5,0.5].
在设计防侧倾控制器时,可以通过模糊控制器对加速度进行补偿,通过增益关系来确定转向角的补偿值.其控制系统框图如图5所示.
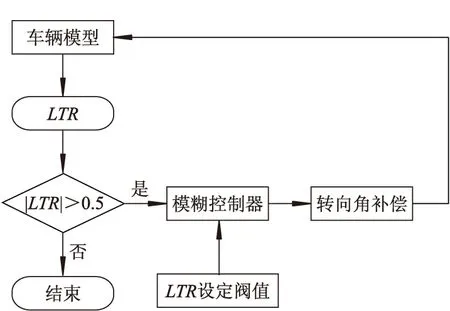
图5 防侧翻控制系统框图
2.1.3模糊控制器设计
模糊控制器中将期望的侧向加速度与实际的侧向加速度的差值以及他们的导数作为模糊控制器的输入,输出变量为喷雾机转角的补偿,将补偿角与实际的车轮转角相加,用来改变车身姿态.模糊控制策略利用模糊逻辑及近似推理,输出所需要的控制量,对目标进行有效控制.输入变量e、ec和输出变量u对应的模糊量分别为E、EC和U.其中E的模糊子集为{NB,NM,NS,ZO,PS,PM,PB};EC的模糊子集为{NB,NM,NS,ZO,PS,PM,PB};U的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},各个模糊子集的定义为NB(负大)、NM(负中)、NS(负小)、ZO(几乎为零)、PS(正小)、PM(正中)和PB(正大).
“汽车电工电子技术”课程在汽车类专业特别是汽车电子技术专业教学中具有极其重要的作用与地位。在以往传统的教学模式中,由于强调学科的系统化,教学内容多而难,严重脱离实际,不适应学生的学习与发展。在新的形势下,根据教育部职业教育教改的精神,以教育部发布的汽车专业教学改革新教学标准与课程标准为依据,强调以就业为导向,以能力为本位,以岗位需要和职业标准为依据,从而对该课程的教学内容和教学方法进行较大力度的改革。
采用 Mamdani 法建立模糊控制规则库 , MIN-MAX-重心法进行去模糊化,转化为精确量输出,结果如表1所示.
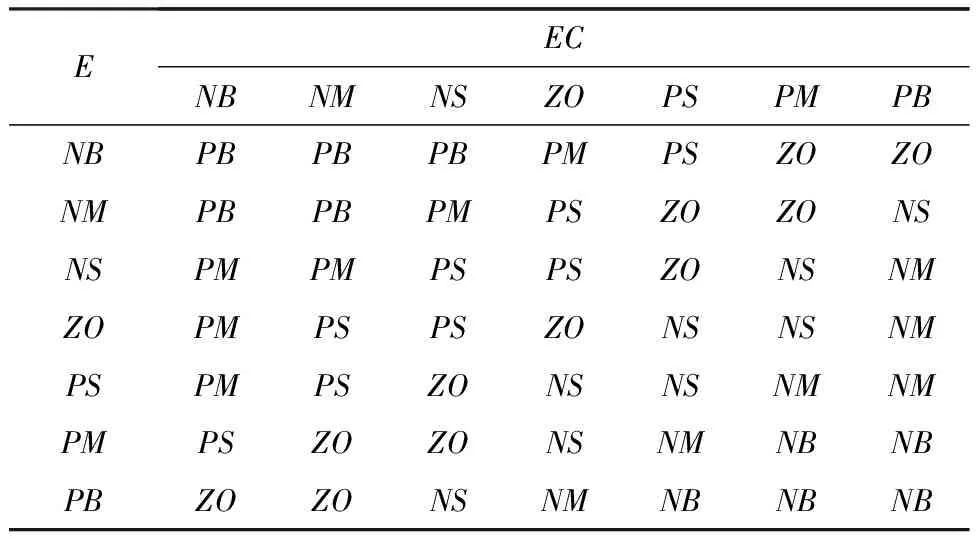
表1 模糊控制规则表
2.2基于MPC的路径跟踪控制
模型预测控制是利用现有的模型,根据模型中系统当前的状态量和未来的控制量去预测系统未来的输出量,被广泛应用于无人驾驶车辆上.MPC包括以下3个基本原理:预测模型、滚动优化和反馈校正[14].
根据离散化之后的状态空间方程,与喷雾机控制的实际情况相结合,选择采样时间T=0.05 s,预测时域Np=90,控制时域Nc=45,列写预测方程:
(20)
预测方程的表达形式如下:
(21)
(22)
(23)
(24)
式(22)为状态量;(23)为控制增量;(24)为输出量.
在进行求解的过程中,由于引入了系统的控制增量并且是未知的,所以通过设定合适的优化目标函数来对其进行求解,进而得到控制时域内的控制序列.在选取优化目标时需要通过处理将其转换成二次规划问题,然后通过MATLAB中的QR工具箱,采用内凸点法计算出控制量的增量的最优值,并与上一时刻输入的控制量结合,再加上参考量的真实值,便可以输出实际的控制量.选取的优化目标函数如下:
J(k)=(Y-Yref)TQ(Y-Yref)+ΔuTRΔu+ρε2=
(E+θΔu)TQ(E+θΔu)+ΔuTRΔu+ρε2=
ΔuT(θTQθ+R)Δu+ρε2+2ETQθΔu,
(25)
式中:第1项反映了对参考轨迹的跟随能力;第2项反映了对控制量的要求;Q、R为权重矩阵;ρ为权重系数.在实际控制系统中,为了防止出现无可行解的情况,会加入松弛因子ε以及一些约束.约束条件如下:
umin(t+k)≤u(t+k)≤umax(t+k),
(26)
Δumin(t+k)≤Δu(t+k)≤Δumax(t+k),k=0,1,2,…,Nc-1.
(27)
在每一个控制周期结束后,会得到一系列控制输入增量,加上上一时刻的控制量会得到当前系统的控制量,即
u(t)=u(t-1)+Δut.
(28)
在下一时刻,系统会根据当前喷雾机的状态量来预测下一时域的输出,进而得到一个新的控制增量.控制系统循环往复,直到完成整个控制过程.
3 仿真结果与分析
在MATLAB/Simulink 中搭建MPC控制器以及防侧倾控制器,模型预测控制器使用的参数:采样时间为0.05 s;控制时域为45;预测时域为90;Q为210;R为35;车轮转角的极值为10°;车轮转角增量的极值为0.8°;松弛因子为100.在ADAMS View中搭建喷雾机模型,将基于MPC的路径跟踪与防侧翻控制方案通过MATLAB与Adams联合仿真进行分析.
基于ADAMS/CAR进行3D路面模型的建立,在ADAMS/CAR中使用3D路面进行整车仿真时,3D路面模型中含有的中心线数据可以用于进行对轨迹的跟踪.文中使用ADAMS/CAR的路面建模器建立连续U形路面,在ADAMS/CAR的路面建模器中可以完整的定义三维空间中的路面中心线、路面中障碍物、路肩、以及路面左右附着系数等.根据最大侧倾角来建立连续U形弯斜坡路面,如图6所示.
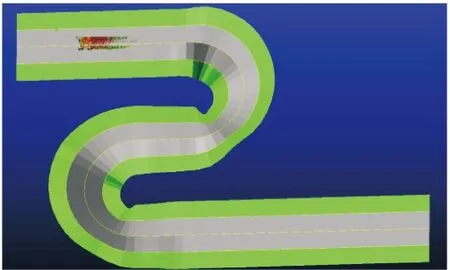
图6 连续U形弯斜坡路面
3.1 未加入侧倾控制器的仿真工况
喷雾机在连续的U形弯斜坡路面行驶,设置路面附着系数为0.9,转弯半径为10 m.
图7是在未引入侧倾控制器时喷雾机的行走时的横向偏差和跟踪的实际情况.红色实线为实际的运行轨迹,蓝色虚线是预期的参考轨迹,两条曲线高度重叠,由此可见模型预测控制具有较好的控制作用.
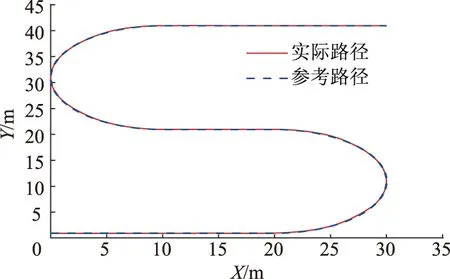
图7 连续U形弯的实际路径与参考路径
图8为喷雾机的速度波形,在直线行驶部分喷雾机速度维持在1 m/s,在转弯处,由于是斜坡路面,在转弯处速度有较大波动,最大达到1.3 m/s,但由于MPC控制算法具有良好的适用性,能够及时调整车身姿态,速度在直线行驶时会达到稳定状态.

图8 连续U形弯喷雾机速度波形
图9为喷雾机的横向偏差波形,在弯道行驶时,喷雾机在转向的过程中,由于路面设置为斜坡路面,存在侧倾作用对喷雾机稳定性产生影响,并且转向角存在波动,致使喷雾机产生较大的横向偏差.其最大横向偏差达到了0.08 m,可以满足喷雾机的控制精度,验证了控制算法的可行性.
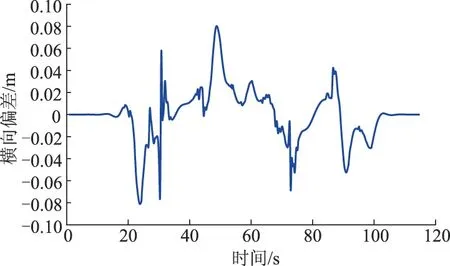
图9 喷雾机的横向偏差
图10为喷雾机的转向角波形,在直线部分转向角为0,由于参考路径在转弯处设置的是不平整的斜坡路面,在转弯处转向角具有一定波动.
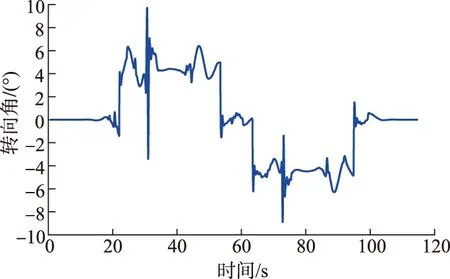
图10 喷雾机的转向角波形
图11为喷雾机的横向荷载转移率,其最大的横向荷载转移率达到了0.6.在超过0.6时可能产生侧倾危险.因此在实现轨迹跟踪的前提下需要控制喷雾机的横向荷载转移率使其稳定在安全阈值.
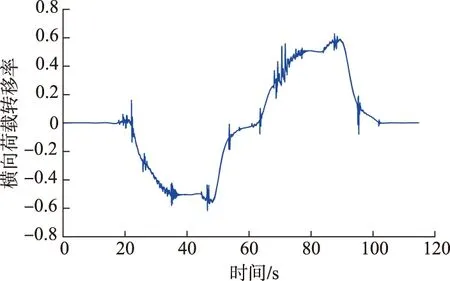
图11 喷雾机的横向荷载转移率
3.2 加入侧倾控制器的仿真工况
为了防止侧倾的发生,设计了防侧翻控制器,其作用是减小系统的横向荷载转移率,使其在复杂路面上行驶时既满足喷雾机的跟踪精度又满足行驶时的安全性.
图12是在引入侧倾控制器时喷雾机的行走时的横向偏差和跟踪的实际情况.蓝色虚线为预期的参考轨迹,红色实线是实际的运行轨迹,两条曲线在转弯处产生较小偏差,在其他处高度重叠,基本满足喷雾机在轨迹跟踪的控制精度.因此在加入防侧倾控制器之后,系统仍具有良好的适用性.

图12 加入侧倾控制器的实际路径与参考路径
图13为加入侧倾控制器之后的横向荷载转移率,由于设定了控制器的作用阈值为[-0.5,0.5],在此阈值范围内控制器产生控制作用.当横向荷载转移率不在此范围时控制器产生控制作用,产生相应的转向补偿角,改变喷雾机的侧向加速度,调整喷雾机的车身姿态,降低喷雾机的横向荷载转移率.其横向荷载转移率由最大的近0.7减小到0.4以内,在一定程度上可以有效防止侧翻的发生.
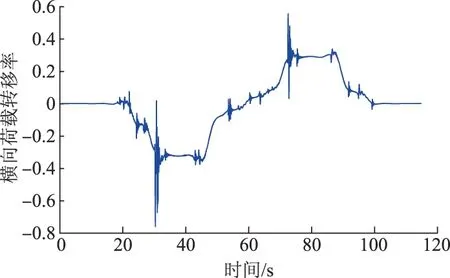
图13 加入侧倾控制器的喷雾机横向荷载转移率
图14为加入侧倾控制器之后的喷雾机的横向偏差波形,其横向偏差最大达到了0.15 m.由于加入了防侧翻控制器,在横向荷载转移率不满足要求时会通过调整转向角来使其侧向加速度减小,使其阈值稳定在某一范围,由于转向角的改变会使在跟踪路径的过程中与实际的转向角产生偏差,因此在一定程度上,横向偏差是增加的.但是仍然满足喷雾机在轨迹跟踪上的跟踪精度.路径跟踪控制器能够在直线处以及拐弯处准确跟踪参考路径,并且在满足路径跟踪的同时,横向荷载转移率一直处于所设置的阈值范围内,喷雾机不会发生侧倾,验证了侧倾控制器的有效性.
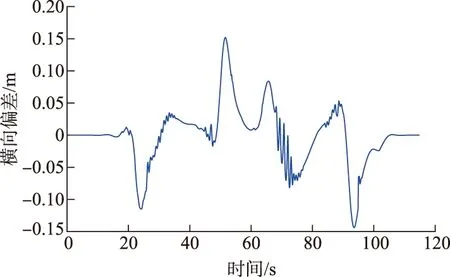
图14 加入侧倾控制器的喷雾机横向偏差
图15和16分别为加入侧倾控制器之后的速度波形和转向角波形,加入侧倾控制器之后,会增加额外的转向补偿角,对车速和转向角都会产生影响,但是由于模型预测控制算法能够对其进行及时调整,速度波形在直线行驶部分喷雾机速度维持在1.0 m/s,在转弯处速度有较大的波动,最大达到1.3 m/s,转向角波形由于侧倾控制器的作用在转弯处具有较大的波动,在直线行驶的过程中转向角为零,转弯处加入了防侧倾控制器产生相应的转向补偿角,使横向荷载转移率减小,可以保证在行驶过程中的安全性.

图15 加入侧倾控制器的喷雾机速度波形
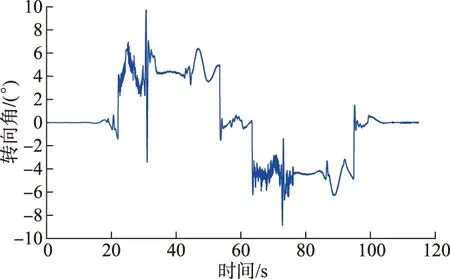
图16 加入侧倾控制器的喷雾机转向角波形
4 结 论
1) 针对传统高地隙喷雾机的缺点,自主研发新型前-后双转向轴的4WID驱动底盘结构的高地隙喷雾机,并建立了喷雾机的运动学模型,基于喷雾机的运动学模型分别构建了路径跟踪控制以及防侧翻控制.
2) 采用分层控制结构来实现喷雾机的路径跟踪与防侧翻控制.整个控制过程可以使喷雾机在轨迹跟踪的过程中既具有较好的控制精度又具有较好的行驶稳定性,保证喷雾机不发生侧倾.
3) 通过ADAMS/MATLAB 的联合仿真结果表明,采用模型预测控制可以满足喷雾机的轨迹跟踪控制,使其横向偏差控制在0.08 m以内.加入防侧倾控制器之后喷雾机的横向荷载转移率可以稳定在0.5以内,保证了喷雾机不发生侧倾,横向偏差可以控制在0.15 m以内,既满足喷雾机在轨迹跟踪上的跟踪精度,又提高了喷雾机的安全性能.