基于Bezier曲线优化的茶园拖拉机避障稳定控制方法
2023-11-09任明辉徐永龙陈逢强杜万兵
梁 军, 任明辉, 陈 龙, 徐永龙,2, 陈逢强, 杜万兵
(1. 江苏大学 汽车工程研究院, 江苏 镇江 212013; 2. 腾讯烟台新工科研究院, 山东 烟台 264000; 3. 宝胜系统集成科技股份有限公司, 江苏 扬州 225800)
随着中国制造2025发展战略的顺利推进,我国的农业机械化水平不断提升,同时物联网和人工智能领域的发展也使得农业机械进入到智能化时代,如无人驾驶拖拉机技术的不断升级和推广应用.目前无人驾驶拖拉机主要应用于平原田地环境,而我国茶园大多分布在山地丘陵地带,则适用于茶园山地工况的“茶园拖拉机”(tractor in tea plantation,TTP)应运而生.文中所研究的茶园拖拉机也称“茶园耕作机”[1],是一种后轮驱动前轮转向的小型轮式拖拉机,具有转向灵活通过性强的特点.不同的工况环境对于拖拉机的操稳性有很大影响,由于丘陵山地环境工况作业的特殊性和复杂性,则保证拖拉机避障运行安全稳定尤为重要,所以研究茶园拖拉机避障稳定运行具有一定的实际应用价值和理论意义.
目前针对拖拉机的避障路径规划算法和拖拉机操稳性分析已经有了大量研究[2-8].如韩冰等[2]提出用五次多项式规划避障路径;郭成洋等[3]提出改进的人工势场法对农机避障进行路径规划;陶金京等[4]对农机静态纵向稳定性进行了分析;唐兆家等[5]对轮式拖拉机稳定性进行分析;张战文等[6]对履带式拖拉机坡道行驶稳定性进行分析.但是这些研究都是限定在水平路面或者平原田地工况展开避障路径规划,或者单独进行水平路面和坡道静态稳定性研究.针对茶园丘陵工况的拖拉机避障方法及稳定性研究分析较少,针对这些不足,文中首先从作业场景和运行稳定性两个方面进行运动学分析,系统分析TTP安全作业特点,接着针对TTP设计一种避障路径规划方案及Bezier曲线路径优化方法,通过在CarSim平台搭建模型验证TTP运行的安全稳定性.
1 TTP安全作业特点
1.1 TTP作业环境
茶园山地一般多为丘陵坡道路况,地面附着系数容易受到气候和环境湿度等因素的影响而发生显著变化,由于其地理环境的复杂性和特殊性,农业机械在其环境下运行失稳可能会导致发生滑移、侧翻、倾覆等危险事故[7].为避免这些危险事故的发生,文中以TTP在茶园山地进行自主避障为背景,研究其在Bezier曲线优化的避障路径上的运行稳定性.对于坡道工况下进行的避障路径规划,必须保证以下要求:① 避障转向速度不能过快,避免重心失稳,从而导致侧翻;② 避障路径的曲率一定要连续,尽可能保证结束位置的曲率等于避障初始位置的曲率;③ 在保证拖拉机稳定运行的前提下,避障路径尽可能短.
为进一步简化研究对象,便于研究TTP在茶园坡道地形的爬坡性能和运行稳定性,同时还需要对坡道环境和拖拉机性能做出如下假设:① 假设坡面条件良好,TTP车轮无纵向滑移;② 忽略空气动力学对TTP的影响;③ 假设TTP匀速行驶,无明显纵向加速度;④ 假设TTP质量分布均匀,重心处于前后轮接地点的中心位置.
1.2 TTP坡道运行稳定性
1.2.1坡面行驶纵向稳定性分析
纵向稳定性包括纵向不翻倾和纵向不滑移两种情况[5-8],其上坡的受力情况如图1所示,其中:Fz1为前轮所受地面支持力;Fz2为后轮所受地面支持力;L为前后轮距;b为重心位置到后轮所受地面支持力方向的距离;a为重心位置到前轮所受地面支持力方向的距离;G为拖拉机所受重力;L1、L2分别为重心在坡道上的投影点距离后轮接地点O2、O1的距离;h为后轮直径;α为坡度角.
根据动力学分析,TTP不发生纵向翻倾的条件是TTP处于坡道行驶方向前方的轮胎所受到的地面支持力要大于0.由图1可得其上坡时前后轮所受地面支持力.前轮接地点O1所受到的地面支持力为
(1)
后轮接地点O2所受到的地面支持力
(2)
随着坡度角的不断增大,轮式拖拉机重心在坡面的投影点后移到后轮接地点O2处,如图2所示.
前轮接地点所受到的地面支持力为
(3)
后轮接地点所受到的地面支持力为
(4)
此时拖拉机重力的分力全部集中在后轮接地点O2处,前轮会发生纵向翻倾.
由图1和图2可得,TTP上坡极限翻倾角度为
(5)
同理,TTP下坡极限翻倾角度为
(6)
要保证拖拉机上坡不发生纵向滑移,就要使得拖拉机后轮提供的最大驱动力Fxmax(也即地面提供的最大附着力)大于重力的分力,即
(7)
式中:Fxmax为后轮最大驱动力;φ为地面附着系数.从而由公式(7)简化得出拖拉机上坡极限滑移坡度角为
(8)
同理拖拉机下坡极限滑移坡度角为
(9)
1.2.2坡面行驶横向稳定性分析
横向稳定性包括横向行驶不打滑和横向坡道转向不翻倾的稳定性[9].TTP坡道横向运行受力如图3所示.
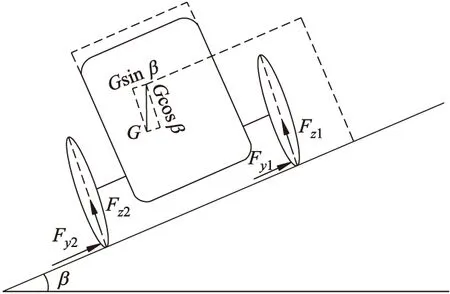
图3 TTP坡道横向运行受力图
坡道横向直行的受力情况为
(10)
由上式可得拖拉机在坡度为β的坡面上横向直行运行不打滑的条件:只要保证两制动轮所受附着力Fφ要大于重力分力Gsinβ.其中Fy1max为左侧制动轮所受地面最大附着力;Fy2max为右侧制动轮所受地面最大附着力;Fφ为两制动轮所受地面最大附着力;βφ为横向运动时的最大滑移角.
TTP在坡面上转向(转向瞬间假设做理想的圆周运动)时的受力如下:
(11)
(12)
(13)
(14)
(15)
式中:F1为拖拉机转向时做圆周运动的向心力;F′1为向心力在坡面的分力;Fφ为地面附着力;R为拖拉机最小转弯半径;B为拖拉机机体宽度;v为转向速度;h为后轮直径;β为坡度角.
对式(11)-(15)计算得
(16)
则TTP在坡道运行进行自主避障的过程中为保证运行安全稳定,需对速度进行限制,并保持在此极限速度以下.
2 TTP避障路径规划
2.1 TTP避障路径规划系统架构
TTP坡道避障路径规划系统架构包括信息采集模块、信息传输模块、信息编码处理模块以及路径规划模块,如图4所示.系统首先通过信息采集模块对周边环境信息和自身运行数据信息进行采集,然后信息编码模块对采集的信息进行编码处理,传输模块将信息传输到ECU进行处理和判断,避障路径规划模块根据ECU发出的指令和数据完成TTP的避障路径规划.
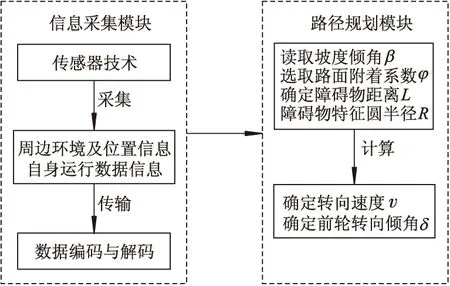
图4 避障路径规划系统架构图
2.1.1信息采集模块
信息采集模块包括周边环境信息感知模块和自身运行数据信息感知模块,两模块中的各类传感器实时采集拖拉机运行时的数据,并将其存储在信息存储模块中.信息采集模块结构如图5所示.
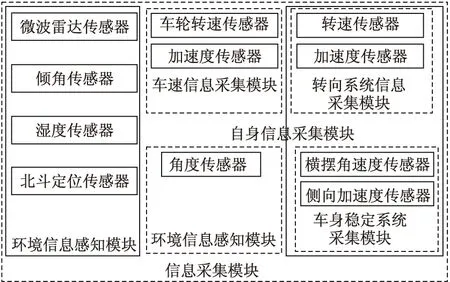
图5 信息采集模块结构图
周边环境信息感知模块包括障碍物检测模块、道路坡度信息采集模块、环境湿度信息采集模块和北斗定位系统接收器模块.障碍物检测模块为一个传感器单元,传感器单元为一个微波雷达;坡度信息采集模块为一个传感器单元,传感器单元为一个倾角传感器;环境湿度信息采集模块为一个传感器单元,传感器单元为一个湿度传感器;北斗定位传感器为一个传感器单元.
自身信息采集模块包括车速信息采集模块、转向系统信息采集模块、制动系统采集模块以及车身稳定系统采集模块.车速信息采集模块为一个传感器单元,传感器单元为两个车轮转速传感器;转向系统信息采集模块包括信息采集单元,信息采集单元为一个转速传感器和一个加速度传感器,转速传感器检测油泵转速,加速度传感器检测转向节的加速度;制动系统采集模块为一个角度传感器组成单元;车身稳定系统采集模块由横摆角速度传感器和侧向加速度传感器组成单元.
2.1.2信息传输和编码模块
信息编码模块由寻呼机电路板组成,该模块将采集模块采集到的信息进行编码,通过无线局域网将编码信息传输到远程监控终端进行信息处理.信息处理模块包括信息接收模块、信息解码模块、信息分析模块和信息显示模块.信息接收模块由无线接收器组成,通过无线局域网接收传输过来的编码信息;信息解码模块采用单片机对收到的编码信息进行解码处理;信息分析模块由装有MATLAB的计算机组成,采集到的环境数据和自身数据对拖拉机自身控制系统进行反馈,及时修正拖拉机避障转向速度以及前轮转向倾角,实时保证拖拉机运行的稳定性;显示模块主要由一块LED显示屏组成,用于显示拖拉机的实时信息.
2.1.3避障路径规划模块
TTP在坡道上运行作业进行避障时,首先需要通过信息采集模块确定障碍物的距离以及障碍物特征圆大小,根据TTP在丘陵坡地作业的情形,可认为障碍物主要包括树木、田埂、水井等,其轮廓一般小于拖拉机最小转弯半径,可以得出障碍物特征圆半径R=rmin.同时为了保证TTP避障过程中的安全通过性以及保证前轮转角骤变幅度易于控制,提出一种基于最短切线法的避障路径,通过对TTP的运动状态分析,确定避障路径中各拐点坐标,从而可以快速完成路径规划.虽然最短路切线法规划的路径光滑平顺,但是路径的曲率变化并不连续,从而导致拖拉机在路径中由圆弧向直线过渡过程中前轮的转角会发生骤变,不利于拖拉机转向控制从而影响其轨迹跟踪控制的精确度[10-12].
2.2 基于Bezier曲线的路径优化算法
采用Bezier曲线进行路径拟合优化,可以保证避障轨迹曲率连续性.
2.2.1Bezier曲线路径优化模型
给定n+1个控制点Pi,i=0,1,2,…,n,则n次Bezier曲线P(t)的定义为
(17)
式中:t为位置参数;Bi,n(t)为Bernstein基函数.对Bezier曲线进行求导可得
(18)
把t=0和t=1代入上式可得
P′(0)=P′(1)=n(Pn-Pn-1).
(19)
由式(15)可得,Bezier曲线在起点和终点处的切线方向和控制多边形的第一条边与最后一条边的方向一致.因此通过调整Bezier曲线起点和终点的切线方向,即可使TTP在规划路径上保证其初始位姿和目标位姿相一致,进而有利于TTP避障结束能沿着初始既定方向前行.
2.2.2Bezier曲线路径拟合过程
TTP避障路径规划采用Bezier曲线对最短切线法路径规划做进一步优化,以期得到连续光滑、曲率连续的路径[13-15].由最短切线避障路径可得,TTP在避障过程中有7个控制点分别为A、B、C、D、E、F、G点,理论上可以采用6阶Bezier曲线进行优化,但是6阶Bezier曲线过于复杂,文中采用两段3阶Bezier曲线,即A、B、C、D为前半段,D、E、F、G为后半段.同时采用两段3阶Bezier曲线,可有效避免因Bezier曲线凸包性造成的避障路径与实际控制点的相对偏差过大造成避障任务失败等情况[16].
3阶Bezier曲线为3次多项式,公式如下:

(20)
其中:t∈[0,1],则有
(21)
式中:x0、x1、x2、x3分别为P0、P1、P2、P3的横坐标;y0、y1、y2、y3分别为P0、P1、P2、P3的纵坐标.
3 试验验证
3.1 试验一
3.1.1试验准备
以东方红LF1204型拖拉机为例 ,根据该型拖拉机相关技术参数得到控制点的相对坐标(单位:cm):A(330.72,0)、B(498.65,53.22)、C(693.86,199.50)、D(935.52,280.85)、E(1 177.18,199.50)、F(1 372.39,53.22)、G(1 540.32,0).在MATLAB中对上述坐标进行两段Bezier曲线创建,如图6所示,在A、D、G点会出现显著拐点,并且起始点A与目标点G点处的走向不一致.导致这种现象的原因是控制点分散的离散性较小,致使生成的Bezier曲线过于线性化,所以还需要对其进一步优化.
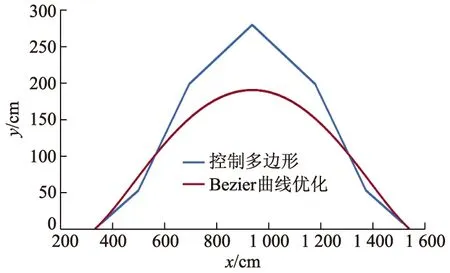
图6 最短切线法路径控制点生成的Bezier曲线
3.1.2Bezier路径优化结果及分析
为增大控制点的离散性并且不改变Bezier曲线起始点A与目标点G处的走向,可以将B、C、E、F点分别向曲线两侧拉伸.为保证整段曲线的起点和终点走向一致,进一步优化得出的控制点坐标(单位:cm):A(330.72,0)、B1(632.67,0)、C1(632.67,280.85)、D(935.52,280.85)、E1(1 238.37,280.85)、F1(1 238.37,0)、G(1 540.32,0).
新创建的Bezier曲线如图7所示.进行优化处理的控制点生成的Bezier曲线呈对称性,且每段曲线呈中心对称,并且代入一般参数曲线的曲率公式可知,曲线的前一部分AD在D点的曲率和后一部分DG在D点的曲率一致,说明整段曲线AD曲率连续,TTP沿着该曲线运行前轮转角容易控制.
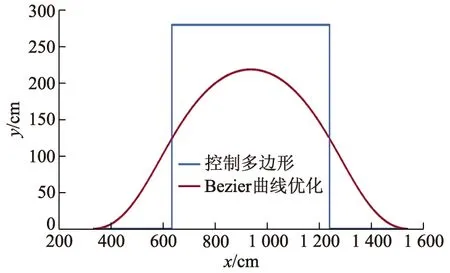
图7 优化控制点新生成的Bezier曲线
3.2 试验二
3.2.1试验准备
在CarSim软件平台搭建仿真试验,模拟TTP在丘陵坡道运行的工作场景,工作场景如图8所示,在此场景下对TTP避障过程中的操纵稳定性进行仿真分析.

图8 TTP工作场景
以国产某款轮式拖拉机的车辆动力装备参数为主要参考数据依据,具体数据:整备质量为m=2 000 kg,前后轮轮距为2 050 mm,最小离地间隙为430 mm,旋转质量换算系数为δm=1.5,转弯半径R=3 000 mm.山地路面附着系数一般为0.1≤φ≤1.2,本试验取φ=0.7,坡度角设为20°.
3.2.2TTP运行速度对避障稳定性影响
由式(12)可知,计算TTP的极限转向速度为v≤3.047 m/s.仿真试验分别设置3个不同速度v1=2 m/s、v2=3 m/s、v3=5 m/s,对拖拉机避障时的横摆角速度、质心侧偏角瞬时响应进行仿真分析.仿真时间设置为2 s,得到横摆角速度和质心侧偏角响应曲线如图9所示.
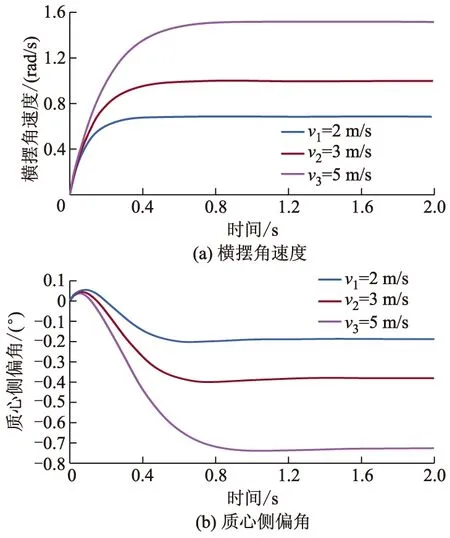
图9 TTP在不同车速运行横摆角速度和侧偏角响应曲线
由图9a可知,当TTP以超出极限转向速度行驶时(v3=5 m/s),横摆角速度的最大值和超调量增大,且达到稳态所经历的时间增长,当转向速度超过极限速度的65.1%时,其横摆角速度的超调量变化率达到了50.3%,横摆角速度超调量增大会导致TTP的稳定性恶化,增加运行危险系数;由图9b可知,随着TTP转向行驶速度增大,则稳态时的质心侧倾角增大,超调量也增大,达到稳态经历的时间也增大,转向速度超过极限速度的65.1%时,其质心侧偏角的超调量变化率达到了78.6%,进而导致瞬态稳定性趋于恶化.
3.2.3TTP作业坡度对避障稳定性影响及分析
由式(6)及本试验所参考的TTP相关数据可得,本试验中的拖拉机的极限坡度角约为45°,仿真试验分别设置3个不同坡度角15°、25°、35°,对拖拉机避障时的横摆角速度、质心侧偏角瞬时响应进行仿真分析.仿真时间设置为2 s,得到横摆角速度和质心侧偏角响应曲线,如图10所示.
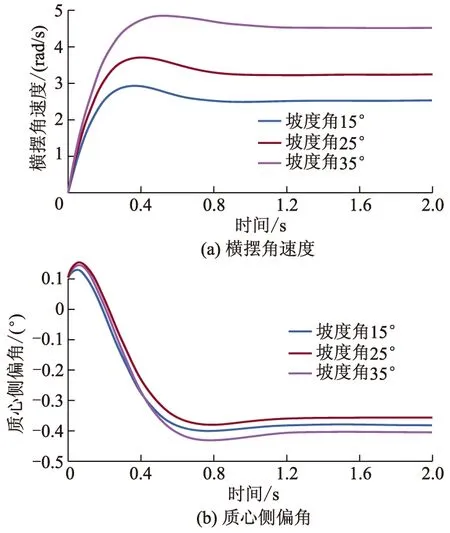
图10 TTP在不同坡度角下运行横摆角速度和
由图10分析可得,在极限坡度角范围内,坡度角增大10°,其横摆角速度和质心侧偏角的超调量变化率平均达到了32.8%和14.5%,随着TTP行驶的坡度角不断增大,横摆角速度的超调量会不断增大,达到稳态所经历时间增加;随着在坡度较大的坡面运动,质心侧偏角也在不断增大,达到稳态所经历的时间延长,稳定性会进一步恶化,甚至会失稳导致侧翻.
4 结 论
1) 针对TTP在茶园丘陵环境工况下提出基于Bezier曲线优化拟合的避障路径,并在CarSim仿真平台得出拖拉机通过避障路径时的横摆角速度和质心侧倾角的瞬态响应数据,进一步分析了TTP在Bezier曲线拟合优化的避障路径下的稳定运行情况.通过仿真试验结果可得,TTP在丘陵坡道运行时,随着坡度的增加,其横摆角速度和质心侧倾角的超调量和达到稳态所经历的时间都会增加,导致其稳定性会恶化;同时随着坡度的增加,即使速度保证在极限速度以下,TTP操纵稳定性也会变差.
2) TTP在Bezier曲线优化拟合避障路径下运行,其速度小于转向极限速度时,稳定性良好.根据试验验证可得,当转向速度超过极限速度的65.1%时,其横摆角速度和质心侧偏角的超调量变化率分别达到了50.3%和78.6%;并且随着坡度的增加,即使速度保证在极限速度以下其稳定性也会变差;同时在极限坡度角范围内,坡度角增大10°,其横摆角速度和质心侧偏角的超调量变化率平均达到了32.8%和14.5%.
3) 文中仅研究了TTP在避障路径上运行的稳定性情况,并未对影响操稳性的自身参数(如质心高度、质心距前轴距离和悬架侧倾刚度)进行研究;并且仿真试验的车辆模型和环境模型较为理想,与实车和现实环境存在误差.在今后的研究中可对这些欠缺部分做进一步研究.