果蔬分选专家系统训练平台分拣模块的设计
2023-11-09李玉龙田军亮
李玉龙,郝 龙,田军亮
(兰考三农职业学院,475300,河南开封)
1 引言
《中共中央 国务院关于全面推进乡村振兴加快农业农村现代化的意见》明确提出,提升农业装备自主创新能力,鼓励智慧化农机装备的研究制造[1]。国家层面出台一系列政策扶持智慧农业发展,支持将机器人、物联网、人工智能等先进的机电技术应于智慧农业领域,装备现代农业各关键环节,完善智慧化、信息化的现代农业科学技术体系。
随着经济的快速发展,人民生活水平显著提高,对生活品质提出更高要求,对物质的需求逐渐呈现小批量、多元化趋势。以果蔬分选产业为例,随着社区团购、网络直播带货等电子商务企业的市场下沉,大中型果蔬分选中心的建设如火如荼,果蔬配送中心需要分选的果蔬种类和数量日益剧增,增加了果蔬分选作业的任务量和难度。为解决上述问题,果蔬分选设备在一定程度上替代人工重复性的枯燥工作,有效提升分选效率。目前主流分选设备仅适用于单一果蔬品种或单一指标,设备闲置率高、准确率低。
本项目研制一种适用于多指标分选训练的分拣模块,在果蔬分选专家系统训练平台视觉数据、重量指标等参数采集分析基础上,对不同品级果蔬进行分选。以西门子S7-1200 PLC 作为主控单元,结合伺服滑台、传感器、编码器、触摸屏等研制分拣模块,实现分拣模块的自动化、智能化。
2 分拣模块的比较与分析
果蔬分选设备通常采用某一指标进行设计:如依据果蔬颜色、病害等外观指标进行分选的外观分拣机;依据果蔬糖度、酸度等内部品质参数的内部质量分选机;依据果蔬重量、尺寸分别设计的重量分拣机和大小分选机[2]。
随着机械电子信息技术的发展,各种分选机在技术上均有所提高,尤其是机器视觉技术的应用,让果蔬分选设备跨越到新的时代。
2.1 大小分选法
根据果蔬尺寸进行分选,所采用的分选方式有滚筒式、筛子式和回转带式等。
滚筒式分选是将一定数量的等直径滚筒有序排列,每个滚筒上设不同孔径的筛孔,按照筛孔直径从小到大排列。小于筛孔的果蔬从首个滚筒的筛孔落下,大于筛孔的果蔬向前运动,直到遇到相应直径的筛孔落下。采用该方式的设备易于生产、分选速度快、果蔬损伤小,但只能应用于近似球形的果蔬分选。
振动筛分选是将多层筛面以一定高度差有序排列,每层筛面上设一定孔径的筛孔,通过振动方式使果蔬运动至卸料仓位置。小于上层筛孔的果蔬落到下层筛面,从而得到不同大小的果蔬。该分选方式果蔬易受损伤,不宜采用。
回转带分选是将两条分离带以人字形排列,随着果蔬的运动分离带间距增加,若果蔬直径小于两带间的间隔则从传送带上落下。该形式结构简单、故障率低,但果蔬分选精度不高。
2.2 称重分选法
称重分选机是按照果蔬重量进行分选的。应用称重原理进行分选的方法有机械称重法、电子称重法。
机械称重式分选机采用杠杆原理,杠杆的两端分别是砝码和果蔬托盘,砝码下面设有支撑装置,确保杠杆水平,当果蔬托盘运行过程中砝码的重量、位置所产生的力矩小于托盘内果蔬力矩时,杠杆倾斜使托盘内果蔬完成卸料动作。
电子称重式分选机通过称重传感器采集果蔬的重量信息,依据相关行业标准对所采集数据进行处理,将果蔬分成不同等级,通过分拣模块卸料机构完成果蔬卸料动作。该方式可根据不同品类果蔬的重量等级标准快速调整分级规格,但仅适用于重量这单一指标,应用范围有限。
2.3 分拣机器人
按照分拣机器人结构,可将机器人分为串联、并联两种,串联机器人有垂直关节、水平关节两种类型。
垂直关节机器人由垂直于地面的腰部旋转轴、带动小臂旋转的肘部旋转轴及小臂前端的手腕等构成,其动作空间近似球体,可解析最优姿态,完成果蔬的分拣。缺点是价位高,速度相对于水平关节机器人稍慢。
水平关节机器人具有串联配置的两个能够在水平面内旋转的手臂。自由度可依据用途选择3~5 个,动作空间为圆柱体。优点是垂直方向上刚度好、动作响应快、果蔬分拣效率高。
并联机器人由多个连续的链状结构共同支持同一个终端装置,常用于精密零件的分拣与装配。优点是结构紧凑、承载能力好、速度高,缺点是工作范围小。
2.4 各种分选设备特点的综合分析
综合各种分选设备特点:大小分选法对果蔬形状的要求近似圆形,且分选精度低、果蔬易受损伤;称重分选法分拣机构仅适用于重量指标,不能满足果蔬分选专家系统训练平台多指标参数训练需求;工业机器人作为分拣机构可满足各种分选指标的训练需求,但价格高。经综合分析,上述方法均不能完全满足果蔬分选专家系统训练平台的需求,需研制一种经济性好的新型分拣模块配套果蔬分选专家系统平台。
3 分拣模块的机械结构设计
图1 为智能果蔬分选训练平台的整体结构示意图,其工作流程如下:将果蔬托盘安装至输送链条,链条在电动机驱动下带动果蔬托盘循环运动;无序排列的果蔬经果蔬上料装置和果蔬分离装置后有序排列,并将果蔬装载到每个托盘;当装有果蔬的托盘运动到称重传感器位置时,采集果蔬的重量数据,当到达摄像头位置时,采集果蔬的图像信息[3];将摄像头所采集的图片信息、称重传感器所采集的重量数据等传送至分拣模块,对所接收的信息进行综合分析,判定果蔬等级;当带有等级信息的果蔬托盘运动到输送机构末端、分拣模块检测到托盘到位后,分选手在伺服滑台的控制下快速运动到相应等级料仓位置,随后果蔬便落到如图2 所示的PU 钢丝软管,通过PU 钢丝软管到达相应等级的料仓,完成果蔬的品级分拣[4]。

图1 智能果蔬分选训练平台整体结构示意图
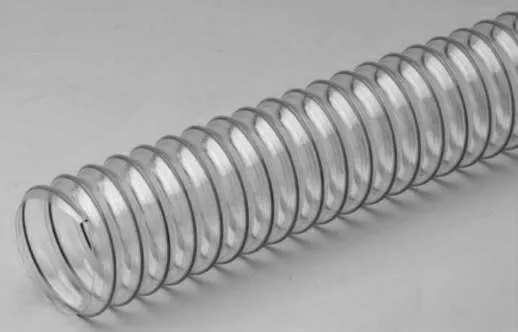
图2 PU 钢丝软管
3.1 分拣模块的支架设计
果蔬分选专家系统训练平台分拣模块支架的作用:为伺服滑台及其他附属装置提供安装结构和支撑。初步设计支架的尺寸为长800 mm、宽800 mm、高1 000 mm。当上料装置、分离装置及输送系统安装完成后,依据果蔬分选专家系统训练平台的整体布局将分拣模块布置到适当位置,根据输送装置的高度调整支架的支撑脚,把分拣模块高度调至适当位置,将果蔬分选专家系统训练平台输送系统与分拣系统组合装调到一起。
图3 为智能果蔬分选训练平台的支架结构示意图,根据结构和强度要求,机架选用40×40W×R4.5 的铝型材,用内置连接件将铝型材连接起来。通过托板螺钉将导向漏斗固定板安装到支架上端;同时在支架上端安装伺服滑台,分选手用内六角螺钉固定到伺服滑台末端。
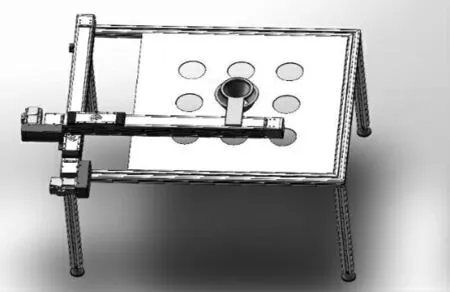
图3 分拣模块支架结构示意图
3.2 滑台模组的选型与设计
3.2.1 分拣模块设计思路
设计十字形滑台组合结构,建立分拣模块三维模型。PU 钢丝软管一端与输送机构末端连接,另一端与滑台模块分选手相连。支架平面上布置漏斗用于果蔬运动导向,使果蔬到达对应等级的料仓位置。通过分拣模块三维模型,验证伺服滑台是否满足功能要求,若满足则研究伺服滑台行程、运行速度对分拣模块性能的影响,通过对关键参数的调整使分拣模块能够高速、准确地完成分拣动作。
3.2.2 分拣模块的设计过程
根据苹果、萝卜等常见果蔬形状、大小和分类等级,拟定分拣模块的最多分选等级为9 级。设计分选手的孔径为150 mm,分选漏斗的上端最大处直径为180 mm,下端最小处孔径为150 mm,卸料仓布置为3×3 的矩阵形式,分选漏斗最大直径外缘保持10 mm的间距,安装分选漏斗的支架板设计尺寸为800 mm×790 mm。
为满足分选需求,分拣模块所用滑台行程至少为750 mm。伺服滑台起到导向作用,选型过程中重点考虑行程和速度调整范围。查阅产品选型手册,选用FBL60 型同步带直线模组,为全封闭式结构,本体宽度60 mm,具有噪音低、轻量化、刚性高等特点,定制活动范围为780 mm,满足至少行程750 mm 的应用需求。分拣模块的整体效果如图4 所示。

图4 分拣模块整体效果示意图
4 分拣模块数据处理系统的设计
4.1 分拣模块数据处理系统的设计目标
基于西门子S7-1200 PLC 设计果蔬分选专家系统训练平台数据采集分析系统包括软硬件两部分,软件部分是核心。数据处理系统基于称重传感器所采集的重量信息和视觉系统所采集的果形、病虫害、色泽等信息,通过以太网传输方式传送至分拣模块,数据处理系统判定果蔬等级。基于标准化、信息化、模块化设计思想及开放式结构策略,拟定如图5 所示的数据处理系统结构图。
图5 数据处理系统结构图
4.2 分拣模块数据处理系统控制方案
果蔬分选专家系统训练平台的输送模块安装称重传感器,通过变送器将采集的重量数据以以太网通信方式传递到PLC 控制器,视觉系统采集果形、颜色、病害等信息。通过人机界面(HMI)设置数据采集系统的指标参数,根据国家果蔬等级标准,对重量和视觉系统所采集到的指标参数进行加权处理,通过数据处理系统所设定的权重计算果蔬品级分值。在程序设计过程中采用多分支条件语句,完成复杂的逻辑判定。通过条件公式节点,确定满足多分支语句的相应条件,判定果蔬等级。等级判别程序节选如图6 所示。
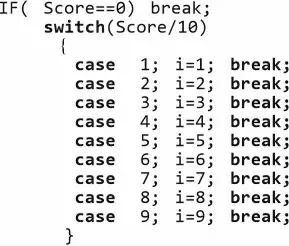
图6 果蔬等级判定程序节选
分拣模块与西门子S7-1200 PLC 通过TCP/IP 协议进行信息交互。当完成等级判定的果蔬从传送带即将到达物料分拣模块的位置时,PLC 控制分拣模块伺服滑台动作驱动分选手运动至卸料仓。
数据处理系统可通过HMI 触摸屏对系统参数进行操作,常用功能也可通过所布置的外部按钮进行快捷操作。设备的运行状态信息通过触摸屏、外部状态指示灯或者扩展的外部显示器进行显示。
4.3 分拣模块人机交互系统设计
4.3.1 分拣模块人机交互的设计原则
果蔬分选专家系统训练平台的分拣模块人机交互界面设计遵循如下原则:①掌握设备使用人员特征,调研用户需求;②根据果蔬分拣流程处理事件的访问查看优先级、分拣过程工艺参数设定顺序等设计系统管理员和操作员的人机交互界面;③提高交互界面的易操作性和友好性,根据用户需求对设备的操作功能进行分区,操作过程中进行信息提示或设置下拉选择框[5];④人机交互界面背景色及操作按钮的色调设计简明,使用户感到赏心悦目又不分散注意力;⑤通过大小框的用户界面(UI)设计布局设计人机交互界面的主次菜单。
4.3.2 HMI 操作面板的设计
昆仑通泰McgsPro 组态软件的图形化显示控件丰富,功能强大。通过实时曲线控件的使用,以图表的方式实时显示果蔬的等级变化,同时应用趋势图实时显示果蔬各品级的数量变化趋势及每批果蔬各品级百分比[6]。
果蔬分选专家系统训练平台数据处理系统人机交互界面包括用户登录界面、系统操作界面和在线监控画面,分别如图7、图8 和图9 所示,系统操作界面包括运行参数设置区、分拣参数设置区、运行操作区,在线监控画面包括实时果蔬品级信息和同一批次各品级的百分比显示。

图7 登录界面
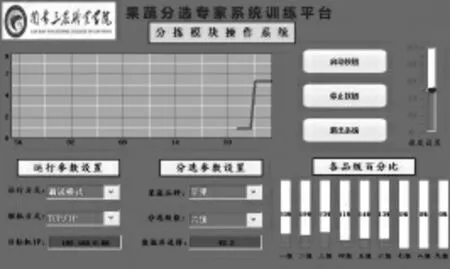
图8 系统操作界面

图9 果蔬等级显示区
(1)登录界面。登录界面由输入控件、标签、标准按钮等构成,设有系统管理员和操作员两种权限,相应权限的用户输入正确的用户名和密码方可进入相应操作权限的系统操作界面,确保参数设置正确、设备运行正常,保障分拣模块使用。
(2)设备运行操作区。如图10 所示,设备运行操作区有启动按钮、停止按钮和退出系统组成,控制分拣模块与联动设备的启动运行和停止及退出程序,在调试模式下可以在线设定分拣速度[7]。
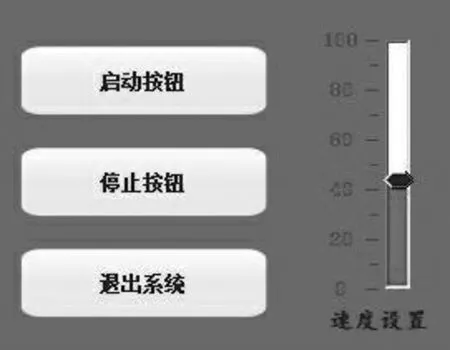
图10 系统控制区
(3)在线监控显示画面。如图9 所示,在线监控显示区由果蔬等级信息、各品级百分比显示组成。运行指示灯显示程序的运行状态,数据缓冲区实时显示当前正在分拣的果蔬等级信息,各品级百分比显示该批次果蔬品级分布状态。
5 结语
果蔬分选专家系统训练平台的分拣模块从结构设计到系统构建借鉴其他各种果蔬分选设备的优点,有效提高分拣模块生产和管理的智能化水平,降低分拣模块分拣的错误率和设备故障率,提高分拣准确度和生产效率[8]。
该分拣模块能够连续、高速、大批量地应用于不同品种、不同果蔬参数指标的分选。实验表明,该分拣模块可以满足智能果蔬分选专家系统训练平台的专家系统训练需求,丰富分选设备的专家数据库,对改善果蔬分选设备的软件系统具有重要的经济意义。