多筒式CPTU 探头的研究*
2023-11-08盛清河裘国华郑国垄陶春辉周建平
盛清河,裘国华,李 青,郑国垄,王 浩,陶春辉,周建平
(1.中国计量大学机电工程学院,浙江 杭州 310018;2.中国计量大学信息工程学院,浙江 杭州 310018;3.自然资源部第二海洋研究所,浙江 杭州 310061;4.浙江省智能制造质量大数据溯源与应用重点实验室,浙江 杭州 310018;5.灾害监测技术与仪器国家地方联合工程研究中心,浙江 杭州 310018)
随着人类社会发展与科技进步,海洋资源开发越来越受到重视,对海底进行勘察显得尤为重要。相对于传统的钻探取样,原位测试技术具有直接获取土体的自然状态下工程地质特性、能直接反应土体的宏观结构对岩土性质的影响、效率高等优点[1-4]。 静力触探技术(CPT)是原位测试技术之一,通过测量锥尖阻力、侧壁摩擦力对土体的岩土性质进行评价。 该项技术的研究始于上世纪30 年代,至今经历了机械式、电测式、电子式、数字式四个阶段[5]。 CPT 技术可以应用于含胶结碎块、珊瑚礁非均质土勘察、修正土类指数土体分类方法、评价土壤沉积物的欠固结、固结与过固结、判别砂土液化等领域[6-12]。 目前CPT 技术主要有地震波SCPTU、电阻率RCPTU、可视化VisCPT、全流触探FFP、海底自由落体贯入式FFCPT、多摩擦筒CPT、探测磁场CPT、旋转CPT、荧光探头LIF 等。 通过在传统的CPT 探头上集成不同的传感器模块、对机械结构进行改进、改变贯入方式等,获取各种参数如水电阻率、土壤电阻率、不排水抗剪强度、三维磁场、地下水源污染状况等等[13-20],为划分土类和土层提供新思路。 现场施工时根据不同的勘察指标选用不同的CPT 技术,然而对于海底这种特殊的淤泥层、粘土层与砂土层组成的软硬土层而言,目前已有的CPT 技术主要是基于锥尖阻力、摩阻比和孔压数据并结合Robertson等提出的SBT 图(土分类图)、Ic(RW)图(土类指数分类图)来进行土分类和土层划分[21],但是该方法在部分土类中存在不确定性,往往需要结合地区资料综合判定。 采用通过理论公式并结合当地地区资料对土层进行间接划分的方法,存在探测结果准确度不高的问题。
针对上述问题,本文从灵敏度与量程出发,在已有的CPTU 探头基础上改进了其机械结构,设计了一款多筒式CPTU 探头,利用内筒、中筒的“双筒”结构测量锥尖阻力,内筒设计成小量程、灵敏度高,中筒设计成大量程、灵敏度低。 此时CPTU 探头兼容了大量程和高灵敏度的特点,可以一杆同时探测浅海软土区及深海硬土区的锥尖阻力,解决了灵敏度与量程之间的矛盾。
1 多筒式结构CPTU 探头的研制
1.1 探头总体设计
在试验性结构探索的基础上,设计图1 所示的一种对软硬土层力学特性一杆测量的多筒式CPTU探头机械结构,该机构在探测地下土层力学特性时,对淤泥、粘土和砂土混叠的土层,不需要更换不同量程的触探探头,实现一杆触探。 这种适用于测量不同土层力学特性的CPTU 探头结构的“双筒”结构体现在图中的内筒、中筒,通过内筒和中筒的受力之和得到锥尖阻力。 外筒用来测量侧壁摩擦力。 通过测量应变片组成的3 组全桥电路的输出分别确定内筒、中筒和外筒的受力大小,从而得到探头贯入海底过程中的锥尖阻力与侧壁摩擦力。 孔压传感器用来测量探头贯入过程中产生的孔隙水压力以及检测孔隙水的消散过程。 电信号采集、分析、传输装置位于探头的第二节,用来将模拟信号转换成数字信号,以CAN 通讯方式传输至地面,由上位机显示海底土体力学的各项参数。
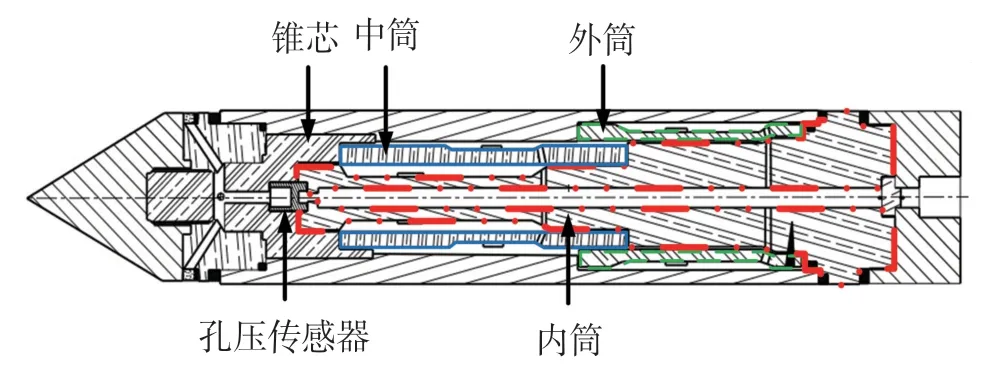
图1 探头总体机械图
1.2 锥尖阻力与侧壁摩擦力测量原理
内筒和中筒的受力之和为锥尖阻力。 为了能够准确地区分不同土层,内筒比中筒略高,用来测量软土部分的力学特性,内筒和中筒叠加起来测量硬土的力学特性。 在探头贯入土壤过程中,由图2 可知,内筒先发生形变,使得内筒被压缩;随着被测土层的硬度增加,内筒压缩量增加,直至中筒被锥芯挤压,使其开始受力。 当中筒开始受力时,说明被测土层为硬土,随着土层硬度的增加,内筒和中筒同时被压缩。 因此在软土层中,只有内筒受力,锥尖阻力只由内筒反映出来;当进入硬土层之后,内筒和中筒同时受力,相当于锥尖阻力被分散在了内筒和中筒,因此锥尖阻力被内筒和中筒共同反映出来。 由于内筒和中筒均由60Si2Mn 弹簧钢制作而成,筒壁上均贴了应变片组成的两组全桥测量电路,锥尖阻力通过弹簧钢的形变体现出来,而弹簧钢的形变通过应变片的形变体现出来,通过测量电路板对全桥电路的输出信号进行处理,即可得到锥尖阻力的大小。 图2为内筒和中筒的叠加示意图。

图2 内筒和中筒叠加示意图
探头竖直向下贯入土壤过程中,根据力与反作用力相等的原理,土壤会给探头一个竖直向上的阻力,即锥尖阻力。 由于探头的制作材料是弹簧钢,弹簧钢具有在一定范围内受力发生弹性形变的性质,因此可以将整个贯入过程等效为图3 所示的双弹簧等效模型,其中F表示锥尖阻力,ΔL表示内筒比中筒高出的高度。

图3 双弹簧等效模型
根据单轴应力状态下的胡克定律可知,当弹簧柱受到轴向大小为F的力时,产生的形变ΔX可由式(1)表示,其中E表示弹簧钢的弹性模量,A表示形变筒的受力面积,L表示形变筒的长度,则通过等效模型后,内筒和中筒的弹簧系数K可以表示为式(2):
当探头贯入软土层时,将此阶段定义为第Ⅰ阶段,此时锥尖阻力仅由内筒反映出来,求得内筒的形变量ΔL内表达式如式(3)所示:
当探头贯入硬土层时,将此阶段定义为第Ⅱ阶段,此时锥尖阻力由内筒和中筒共同反映出来,受力情况如图4 所示,此时设中筒的形变为ΔL中,则内筒的形变为ΔL中+ΔL,此时锥尖阻力F与弹簧总的弹力为一对平衡力,因此可以得出式(4)的受力平衡方程,解得式(5):
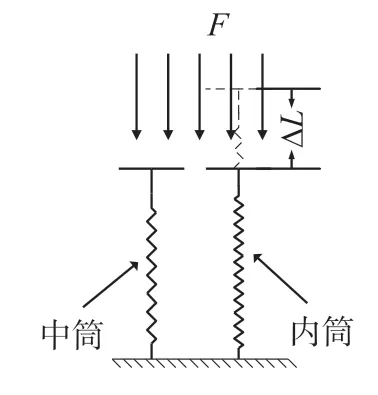
图4 第Ⅱ阶段
因此第Ⅱ阶段即探头贯入硬土层时锥尖阻力的分配情况,如式(6)及式(7)所示:
由上式可知,通过改变ΔL的长度即可改变探头的第一量程。 因此采用多次实验法,利用不同长度的中筒进行实验,最后得出最佳长度ΔL。
对于侧壁摩擦力的测量,采用摩擦筒与外筒相扣的方式,探头在贯入过程中土体对摩擦筒产生一个摩擦力,摩擦筒挤压外筒,使外筒发生弹性形变,由全桥电路测量出该形变对应的输出电压。 外筒与摩擦筒连接示意如图5 所示。
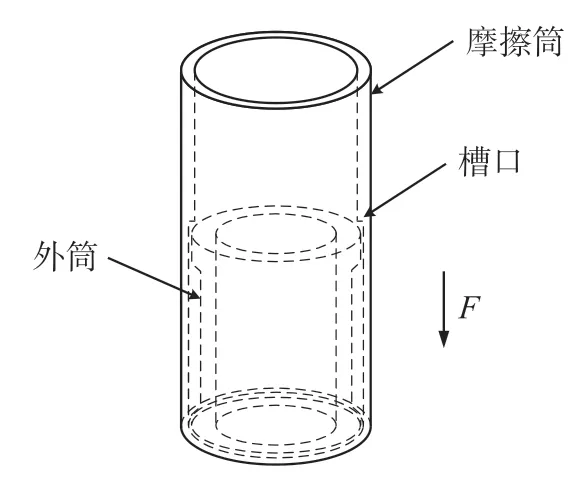
图5 外筒与摩擦筒连接示意图
1.3 孔隙水压力测量原理
由于在探头贯入过程中,探头的锥尖部分与泥水混合物直接接触,所以需要将泥和水进行分离,因此需要确定泥水过滤结构及材料。 多孔陶瓷材料是指在陶瓷材料内部通过不同方法,如物理、化学方法等,引入独立闭口孔隙或连通开口空隙的材料,可用于催化剂载体、物质分离、高能量密度材料等领域[22]。 海洋的土质主要可分为粉质粘土和粒状土,包括细砂、砂质粉土等[23]。 根据水利部《土工试验规程》(SL 237—1997)分类法,砂粒的粒径范围在75 μm~2000 μm 之间,粉粒的粒径范围在5 μm~75 μm之间,装置选用的小气孔多孔陶瓷孔径小于50 μm,可以有效地分离细砂与大部分粉土土粒。由于存在小部分粒径小于50 μm 的土粒存在,会对多孔陶瓷造成堵塞,因此在使用一定次数后,需要及时更换多孔陶瓷,保证其通透性。 图6 所示为多孔陶瓷安装位置。

当探头贯入土层时,土体周围的孔隙水透过多孔陶瓷滤环,由透水孔进入探头内部,内部的孔隙水压力传感器如图7 所示。

图7 孔隙水压力传感器
1.4 应力传感器测量原理
应力传感器实际上是由四个应变片组成的全桥电路,如图8 所示,其输出为:
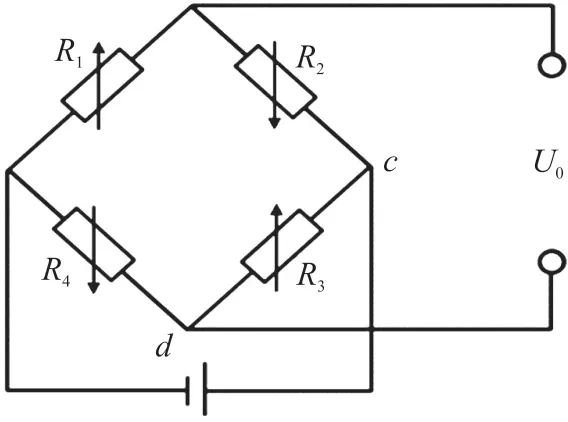
图8 全桥电路
由于4 个电阻阻值相同,发生形变时满足等式ΔR1=-ΔR2=ΔR3=-ΔR4,约去高次项,输出电压为:
式中:ΔR/R表示电阻的应变,由上式可知,全桥电路的输出电压为供电电压与电阻应变的乘积。 而电阻应变又可表示为电阻丝的灵敏系数K与测量筒应变的乘积:
由式(9)、式(10)可得:
式中:ε=ΔL/L表示测量筒的应变。 上式说明了在忽略电阻应变的高次项时,测量筒应变与全桥电路的输出电压呈线性关系。
1.5 Kalman 滤波
Kalman 滤波器示意图见图9,测量系统中的噪声分为过程噪声与观测噪声,Kalman 滤波算法是一种通过从带有噪声的数据中获取最优估计值从而提高系统预估精确度的算法,最优估计过程也可看作滤波过程[24-25]。

图9 Kalman 滤波器示意图
单传感器状态方程如下:
测量方程如下:
式中:k为离散时间变量,k≥0;xk为状态变量,xk∈Rnx×1;A为系统矩阵,A∈Rnx×nx;B为输入矩阵,B∈Rnx×p;uk为输入,uk∈Rp×1;Hk为观测矩阵,Hk∈Rp×nx;zk为观测矩阵,zk∈Rp×1;wk和vk分别为过程噪声和观测噪声,wk∈Rnx×1,vk∈Rp×1,且满足wk~N(0,Qk),vk~N(0,Rk),其中Qk和Rk为过程噪声和观测噪声得到协方差矩阵,Qk∈Rnx×nx,Rk∈Rp×1。
定义先验估计误差和后验估计误差分别为:
式中:xk表示k时刻的真实值,表示k时刻的先验估计值(上一次的估计值),表示k时刻的后验估计值(k时刻的估计值)。
先验估计误差的协方差和后验估计误差的协方差分别为:
最终的后验估计值的表达式如下:
式中:Kk称为Kalman 增益,其表达式如下:
其中后验估计误差的协方差更新如下:
在本次测量系统中由于没有输入,故uk=0,且待测值zk为直接测量得到的单个数据,因此观测矩阵H为1,系统矩阵A为1,观测噪声的方差R和过程噪声的方差Q的取值均为一维数据,利用MATLAB 进行多次试凑,最后确定取值分别为500和0.001,此时滤波效果最佳。 校正迭代过程可写成:
预测迭代过程可写成:
利用所设计电路板测量探头的输出电压,得到2 000 个数据,将测量得到的数据进行滤波,得到图10 所示曲线。 从图中可以看出,经过滤波后,数据曲线明显更平滑,数据抖动更小。
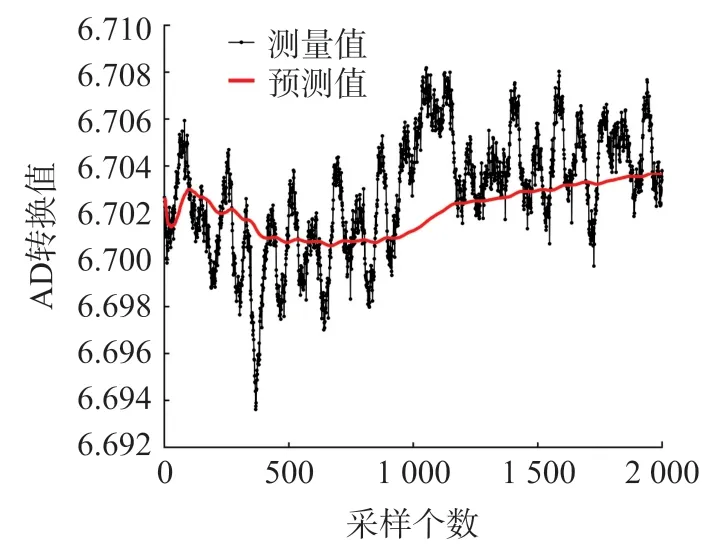
图10 Kalman 滤波前后数据对比图
2 静态实验及结果分析
2.1 探头的三个测量筒单独加压实验
由全桥测量电路的原理可知,其输出电压与测量筒的应变量成正比,实际上由于测量电路、加压装置、应变片粘贴、测量筒加工及热处理、弹簧钢的几何非线性等方面引入的非线性因素,会使得输出电压与测量筒的应变不成正比,而是二次甚至三次函数关系。
探头三个测量筒的应变片采用H-610 专用胶水进行粘贴,A 胶和B 胶质量比为1 ∶2,混合静置24 h 后即可使用。 由于测量筒为圆柱形试件,因此待粘贴的两块应变片应采用曲率与测量筒外侧曲率相同的夹具进行挤压,使得两片应变片受力相同。粘贴好应变片后需要进行固化,首先升温至135 ℃后保温2 h,待冷却至室温后再升温至165 ℃,冷却至室温,此时表明粘贴完成。
本实验采用图11 所示装置进行实验。

图11 实验装置
此桌面长宽均为50 cm,桌面到顶板的距离大约60 cm。 通过按压液压杆,产生的液压力用来模拟探头贯入过程中土对探头的阻力,包括锥尖阻力和侧壁摩擦力,测量电路对待测信号进行测量后通过CAN 总线传输至PC 端,上位机将采集到的数据进行保存,得到输出电压与液压力之间的关系。 实验时,先分别对内筒、中筒和外筒单独施加压力,分别得到三个测量筒的输出电压与输入压力之间的关系。 为了获取更多的样本点,每次按压液压杆的垂直距离不超过5 cm,此时液压力的增量不超过400 N。 由于内筒用来测量软土层的力学特性,因此设计内筒时主要考虑其灵敏度,故其所承受的压力不宜过大,否则会使内筒进入屈服阶段,失去弹性性能,实验时施加的最大压力为7 kN。 中筒是按照大量程低灵敏度设计的,因此可以施加较大的压力,施加的最大压力为45 kN。 外筒设计的量程为0~10 kN,实验时施加的最大压力为30 kN。 实验曲线如图12 所示。
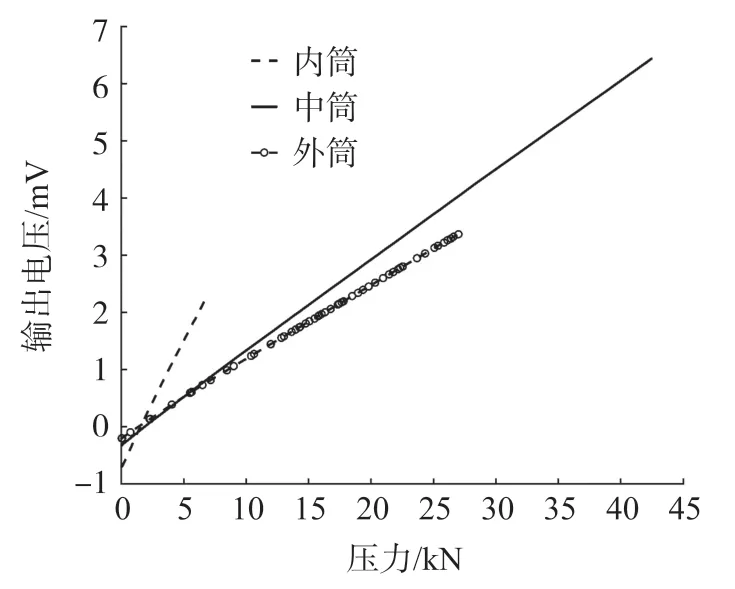
图12 三个形变筒单独加压曲线
由图12 可以看出,全桥电路输出电压与施加的压力呈线性关系,符合预期结果。 从斜率可以看出,内筒的灵敏度最高,中筒的灵敏度其次,外筒灵敏度最低。 且三条曲线的起点均不在原点,原因是在应变片粘贴时,很难避免应变片不发生形变,因此初始状态时全桥电路并不处于平衡状态。
2.2 最小二乘法拟合分析
为了得到每个形变筒输出电压与输入压力之间的函数关系,使用最小二乘法进行曲线拟合。
设S(x)=β0+β1x,代入实验数据得:
简化为:
式中:X和y分别为实验数据的输入压力和输出电压:
经过矩阵运算及化简可得所求的系数矩阵为:
利用MATLAB 进行计算后,可得三个形变筒输入输出的拟合函数,如表1 所示。

表1 拟合函数及拟合误差
斜率的单位为mV/kN,表示形变筒的灵敏度,截距表示全桥电路的初始输出电压。
2.3 内筒和中筒同时加压实验与分析
由上述的测量原理可知,内筒置于中筒内部,且比中筒高出ΔL,因此探头受压时,内筒首先受力,待内筒的轴向形变超过ΔL时,中筒再受力。 当内筒和中筒的横截面积确定后,通过改变ΔL可以改变内筒的量程。 由于在设计探头的机械结构时,内筒长度固定,因此通过改变中筒的长度来改变ΔL。 本次实验采用ΔL为0.1 mm、0.2 mm、0.3 mm、0.4 mm的内筒进行实验,此时仅记录内筒与中筒的实验数据,曲线如图13 所示。
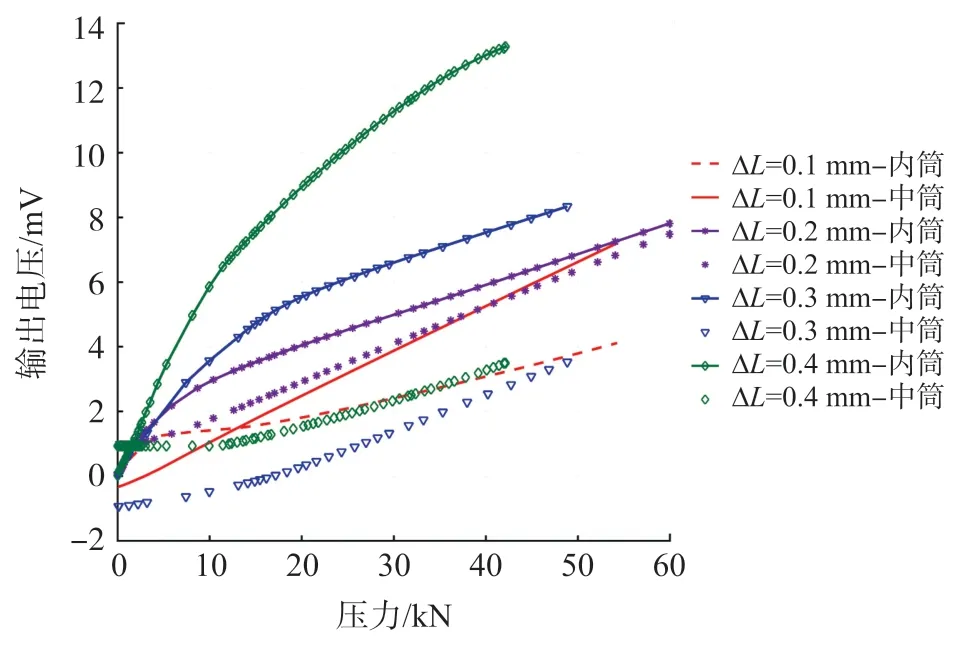
图13 内筒中筒同时加压曲线
从实验曲线可以看出,随着ΔL的增加,内筒的输出最大电压增加,中筒开始受力的点往右平移,如果ΔL过大,则内筒很有可能随着压力的增加而进入屈服阶段。 如果ΔL过小,由于机械加工误差及装配误差的存在,使得内筒与中筒之间的微小距离很难控制,由图所示,当ΔL=0.1 mm 时,实际上此时中筒也已经开始受到了压力,所以ΔL不宜过小。
实验结果表明,ΔL=0.2 mm 是最合适的长度,此时中筒在1.6 kN 时开始受力,意味着当锥尖阻力小于1.6 kN 时,内筒一直受力,且当压力为13 kN时,过渡完成。 在该过程中,随着土质硬度增加,探头测量锥尖阻力的灵敏度越来越低,直到中筒和锥芯完全重合,由此说明当锥尖阻力小于1.6 kN 时灵敏度最高,能对软土部分进行测量,当锥尖阻力大于13 kN 时,灵敏度最低但量程最大,可以对硬土部分进行测量,与现有的CPTU 探头相比,具有高灵敏度与大量程的优点。 过渡阶段之后,内筒曲线的斜率比测量软土部分时的斜率小,说明进入到硬土层时,内筒和中筒同时受力,且内筒斜率比中筒曲线的斜率小,说明对于给定的压力增量ΔF,中筒的输出电压增量Δu更大。 内筒与中筒受到的压力之和即为锥尖阻力。
3 动态实验及结果分析
假设探头的三个形变筒为相互独立的二阶线性系统,为了获取系统时域响应的性能指标如上升时间、调节时间、峰值时间、超调量等,需要对探头进行动态实验,一般采用单位阶跃信号作为输入,并利用采集到的系统输出从而辨识出其传递函数。 然而要在一瞬间输出一个恒定的液压力是很难实现的,但是可以在一瞬间将液压力撤去,因此本次采用泄压的方式得到一个负单位阶跃信号,采集到输出数据后将其归一化为0 到1,此时即可看作是一个单位阶跃响应实验。
将采样频率设置为最高31 250 Hz,并一次性采集3 000 个数据,经归一化、Kalman 滤波后得到内筒、中筒和外筒的单位阶跃响应曲线,如图14 所示。
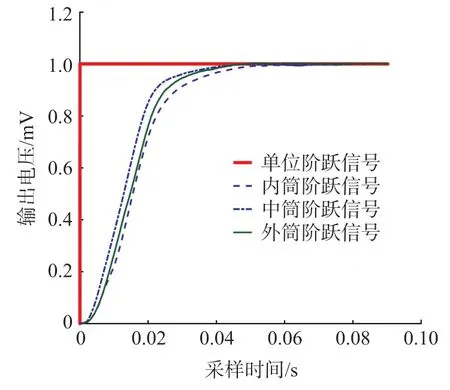
图14 单位阶跃响应
由图14 可以看出,形变筒均在60 ms 内进入稳态,且无超调量或者超调量很小。 利用MATLAB 的System Identification 工具箱进行系统辨识,得到三个形变筒传递函数如表2 所示。
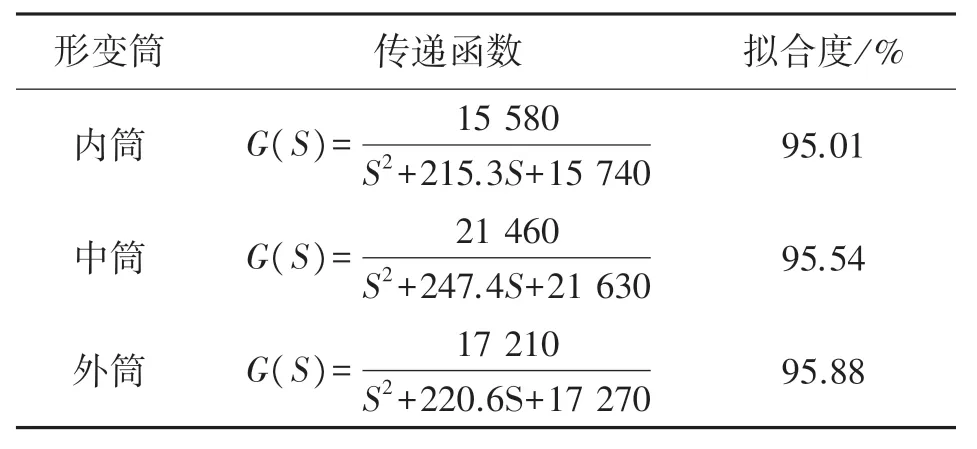
表2 系统辨识结果
二阶系统的标准表达式为:
对比可知,三个形变筒的阻尼均大于0 小于1,因此均为二阶振荡系统,计算出上升时间、调节时间、峰值时间、超调量如表3 所示。

表3 形变筒的时域性能指标
实验及计算结果表明,中筒的调节时间最短,内筒调节时间最长,但均在60 ms 内,因此形变筒有很好的快速响应性能。 若以《静力触探技术标准》推荐的贯入速率0.015 m/s~0.025 m/s 进行现场试验,则在60 ms 内最大贯入0.15 cm,相当于探头可以瞬间反映出被测的力学参数,因此探头符合快速响应要求。 同时,虽然内筒的灵敏度最高,但是其调节时间最长,因此灵敏度与响应速度并不呈正相关关系。
4 结论
通过对特定海域土质的调研和分析,为了实现对淤泥、粘土和砂土共存土层的同时勘察,合理地选取“双筒”结构实现对锥尖阻力的测量,集高灵敏度和大量程于一体,可以同时对浅海的软土区及深海的硬土区进行勘察,从而达到土分类与土层划分的目的。实验结果表明,过渡阶段的区间长度取决于内筒与中筒的高度差ΔL,通过改变ΔL可以改变测量淤泥层、粘土层等软土的量程,且ΔL过长,则测量软土量程变大,但当测量硬土层时内筒容易进入屈服阶段;ΔL过短,则测量硬土层时量程变大,但测量软土层的灵敏度过小,将导致无法准确测量软土层。
通过设计测量电路、加压装置并进行不同的实验,将所测数据进行卡尔曼滤波,用最小二乘法进行线性拟合,得到内筒、中筒和外筒的灵敏度分别为0.432 3 mV/kN、0.158 7 mV/kN、0.132 1 mV/kN。
对探头进行单位阶跃响应实验时,由于很难产生一个瞬间恒定不变的液压力,于是采取瞬间泄压的方式产生一个负阶跃信号,通过对输出数据进行相应处理,从而等效成一个单位阶跃响应实验。 通过实验数据辨识出三个形变筒的传递函数,并根据传递函数计算出时域响应的性能指标。 实验及计算结果表明,探头的三个形变筒可以等效成二阶欠阻尼振荡系统,且响应时间均小于60 ms,超调量均小于1%,因此具有快速响应和低超调量的特点。 且从调节时间可以看出,灵敏度高的内筒,其调节时间却高于灵敏度低的中筒和外筒,因此灵敏度与响应速度不呈正相关关系,存在两者不可兼得的问题。
通过以上实验可以看出,本次设计的多筒式CPTU 探头可以实现一杆测量软硬土层的锥尖阻力、侧壁摩擦力和孔隙水压力,为海底特殊土层勘察仪器的研究提供相应的借鉴与参考。 然而受到探头直径尺寸的制约,在有限的空间内安装三个形变筒,该方案存在灵敏度、量程、几何非线性及合理装配等之间的矛盾。