等离子体湍流摩擦减阻研究进展与展望
2023-11-02宗豪华方子淇
苏 志,宗豪华,梁 华,,吴 云,2,方子淇
(1.空军工程大学 航空工程学院 航空动力系统与等离子体技术全国重点实验室,西安 710038;2.西安交通大学 机械工程学院,西安 710000;3.西安交通大学 航天航空学院,西安 710000)
0 引言
飞行阻力是飞机发展中面临的永恒问题。减小飞行阻力能显著增大飞机航程与航时,减小环境污染与燃油消耗,降低飞行成本。对于民用飞机,以波音747 为例,在航程不变的前提下,每增加1%的阻力,则年燃油消耗量将增加约4.5×105L[1-2]。对于军用大飞机和长航时无人机,飞行阻力也是影响其作战时间、任务载荷和作战半径的关键参数。在国际竞争逐步加剧,对我国军事能力要求不断提高,同时“碳中和”与“碳达峰”战略发展全面深化的大背景下,减小飞行阻力对于我国军用/民用飞机的发展都具有重要意义。
飞机飞行阻力从大的方面可分为两类:一类是由压强在来流方向上的投影造成的阻力,即广义的压差阻力;另一类是由飞机表面切应力造成的阻力,即摩擦阻力。如图1 所示,以巡航状态的高亚声速大型运输机为例,上述两大类阻力约各占50%,其中广义的压差阻力又可继续分为由机翼气动力在来流方向上的分量造成的诱导阻力(约占30%)、由机翼表面边界层分离导致的机翼压差阻力(约占15%),以及后体阻力等其他阻力来源(约占5%)[2-3]。为减小飞机飞行阻力,研究者们针对不同的阻力构成发展了多种流动控制方法。
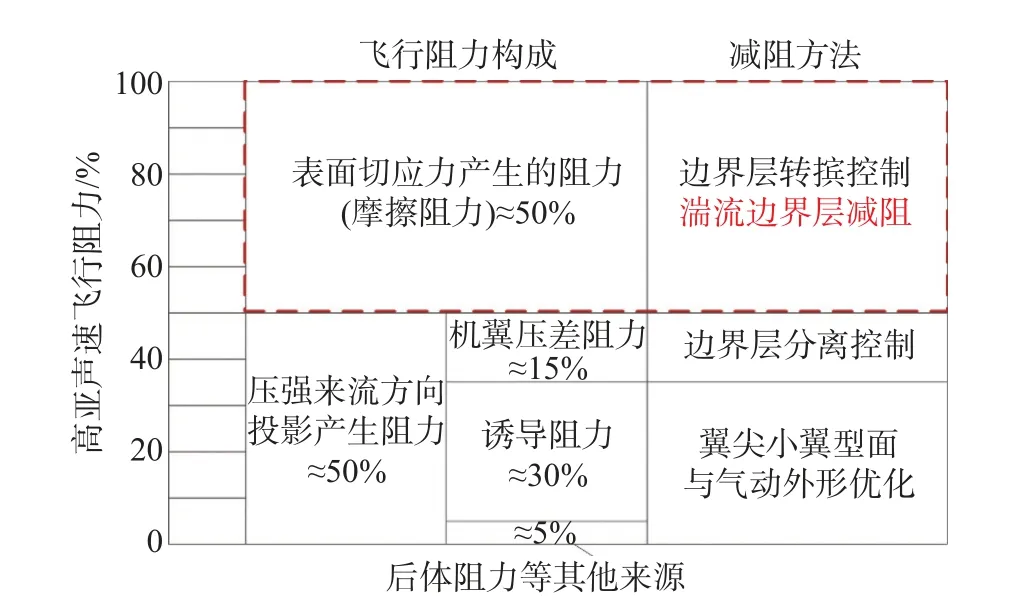
图1 飞机飞行阻力的基本构成[2-3]Fig.1 Flight drag components[2-3]
流动控制是指采用主动或被动的手段干预流场使其产生预期改变的方法[4-6]。针对机翼压差阻力,可通过涡流发生器[7]、机翼前缘吹/吸气[8]和等离子体激励[9]等方式抑制机翼表面边界层分离,从根源上减小压差阻力。针对诱导阻力和后体阻力等来源,则一般仅可采用气动外形优化或安装翼尖小翼等方法对其进行抑制[10-12]。在图1 所示的各阻力来源中,摩擦阻力占比最大。除优化气动外形外(如层流机翼设计),采用流动控制的手段减小摩擦阻力的方法一般可分为两类:一是通过推迟边界层转捩,使飞机表面更大面积的边界层尽量处于摩擦阻力较小的层流状态以减小总摩擦阻力;二是在边界层转捩为湍流后,通过对湍流边界层内部结构的调控,减小湍流条件下的摩擦阻力[12-13]。
常用的推迟边界层转捩的方法有壁面抽吸和使用柔性复合材料蒙皮等[12],同时也有采用等离子体激励抑制圆锥边界层转捩的研究[14]。但在雷诺数较大的情况下,在飞机表面保持大面积的层流区难度较大,因此湍流边界层减阻成为流动控制领域的研究热点。自20 世纪60 年代 Kline 等[15]发现湍流边界层中的近壁面相干结构以来,针对相干结构的调控,研究者们发展了复杂壁面[16-18]、边界层吹/吸[19-20]和展向壁面振荡[21-22]等多种湍流减阻方法,并取得了丰富的成果。基于介质阻挡放电(dielectric barrier discharge,DBD)的等离子体激励是一种新型的主动流动控制方法,具有结构简单、响应快、控制灵活等优点[23-24],有望以较小的结构与重量代价实现较好的减阻效果,成为一种理想的湍流边界层减阻手段。因此,DBD 等离子体激励在湍流边界层减阻中的应用受到了国内外研究人员的广泛关注,同时也发展了多种DBD 等离子体激励方式,并取得了良好的控制效果。
由于在等离子体湍流减阻技术发展过程中,对其他典型的湍流减阻方法多有借鉴,因此本文首先对除等离子体激励外的典型湍流边界层减阻方法进行简述;然后在此基础上详细论述国际上等离子体湍流减阻技术的研究进展,梳理发展脉络;最后对需要进一步深入研究的关键科学和技术问题,以及等离子体湍流减阻技术的发展趋势进行展望,以期为等离子体湍流减阻研究提供参考。
1 典型湍流摩擦减阻方法
为寻求湍流边界层中随机流动行为的“稳定”规律,20 世纪60 年代以来,研究者们对湍流边界层中的流动结构进行了大量研究,结果表明,在边界层内部距离壁面的不同高度层中,存在不同的湍流相干结构与湍流行为,这些相干结构与湍流行为在湍流生成和摩擦阻力产生过程中作用显著[25-27]。采用流动控制手段对湍流相干结构进行调控,抑制湍流产生,是湍流摩擦减阻的重要思路。
在湍流边界层中,通常定义摩擦速度(uτ)和黏性长度尺度(δυ)作为边界层内层与黏性相关的速度尺度和长度尺度。二者的定义如下:
其中:τw为壁面切应力;ρ为空气密度;υ为空气的运动黏度。
基于上述黏性尺度定义的雷诺数称为摩擦雷诺数(Reτ):
其中,δ为边界层厚度。根据控制对象和控制机理的不同,一般可将湍流边界层减阻方法分为内部尺度控制方法和外部尺度控制方法两大类:内部尺度控制方法主要针对近壁面自维持过程或发卡涡结构对近壁面湍流行为进行控制;外部尺度控制方法主要通过控制边界层外区大尺度结构来对近壁面流动产生影响,进而影响壁面切应力[28]。内部尺度控制方法主要包括复杂壁面、壁面吹/吸和展向壁面振荡等;外部尺度控制方法则主要以大涡破碎装置为代表。典型主/被动湍流减阻方法的分类如图2 所示。
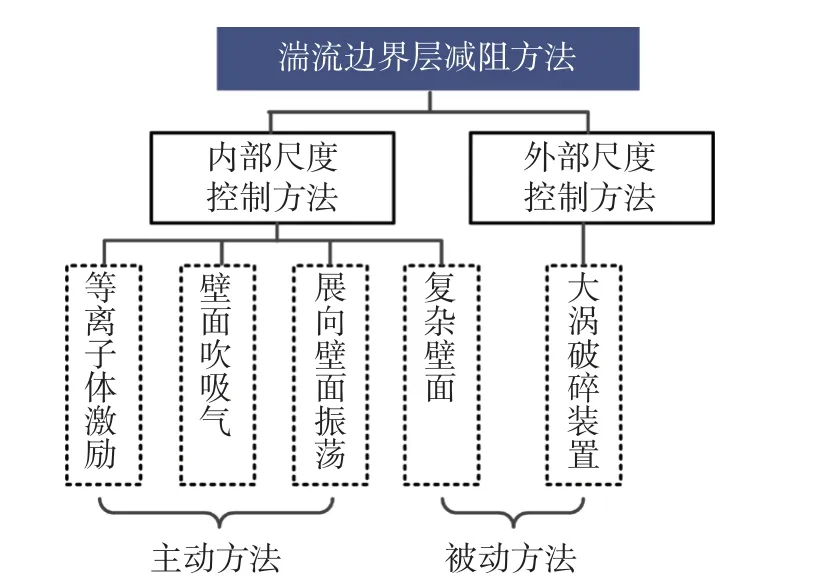
图2 典型主/被动湍流减阻方法的分类Fig.2 Classification of typical turbulent drag reduction methods
1.1 复杂壁面
复杂壁面是指通过对壁面结构进行处理,影响近壁面湍流相干结构,从而实现减阻的被动流动控制方法,主要包括小肋(又名沟槽)、阵列凹坑、超疏水壁面和黏弹性的硅橡胶涂层等,其中小肋研究最为广泛[29]。小肋一般指壁面处沿展向周期性布置的流向突起或凹槽,如图3 所示,其可通过抑制低速条带展向运动,减少猝发事件的发生,进而减小壁面摩擦阻力[30-32]。通常,当小肋高度为h=8δυ~12δυ、相邻小肋展向间距s=15δυ~20δυ时,减阻效果最好,能使摩擦阻力减小约8%~10%[16]。小肋等复杂壁面减阻方法的优点是无需能量消耗,缺点是当偏离设计状态时其减阻效果迅速减弱,这成为限制其应用的重要因素。

图3 小肋减阻方法[28]Fig.3 Riblets drag reduction method[28]
1.2 壁面吹/吸
壁面吹/吸是指,通过在壁面附近施加展向或法向射流以及采用边界层抽吸等方法控制边界层底层流动结构,进而实现减阻目的的方法。与复杂壁面等被动控制方法相比,壁面吹/吸属于主动流动控制方法,能够有针对性的设计控制策略对近壁面相干结构进行调控,实现更好的控制效果。基于吹/吸气以减弱边界层相干结构为目标进行反向反馈控制能够产生20%~30%的减阻效果[33-35]。此外,采用多孔介质表面进行法向均匀微吹气(如图4)能够实现50%~70%的局部相对减阻量[36-38]。壁面吹/吸方法减阻效果好、控制灵活,同时可实现多种复杂的控制策略,但也存在供气系统复杂、减阻代价高、多孔介质难以维护等问题。
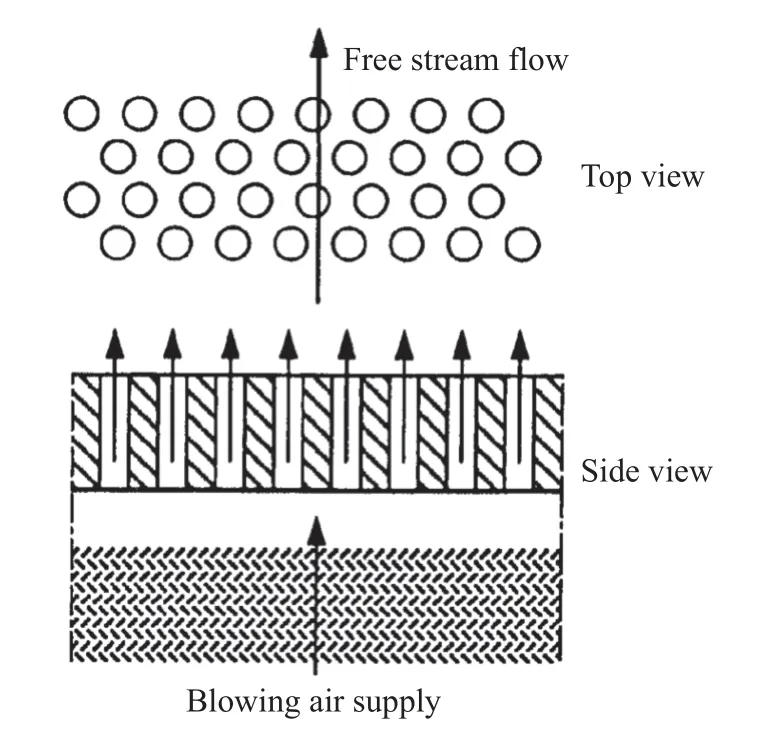
图4 微吹气湍流减阻方法[38]Fig.4 Micro-blowing drag reduction method[38]
1.3 展向壁面振荡
20 世纪90 年代,大量研究表明,瞬间变化的展向压力梯度能够有效降低边界层中的湍流生成和雷诺应力[39-42]。受此启发,研究者们开始采用非定常的展向壁面运动(如图5)进行减阻研究,自此展向壁面振荡减阻方法蓬勃发展。对于展向壁面振荡减阻方法,壁面振荡周期约为Tosc+=Toscuτ2/υ≈100[42]、振荡幅值Zosc+=Zoscuτ/υ≈ 30 时减阻效果最为显著[43],可实现40%左右的摩擦减阻量。展向振荡的壁面能够在湍流边界层黏性底层顶端诱导展向正涡量,展向正涡量与底层负涡量相抵消,减小底层法向速度梯度,进而减小摩擦阻力[44]。展向壁面振荡方法减阻效果好,但由于其机械结构复杂,且振荡过程中机械能损失较大,其减阻代价较大,难以实现减阻能量收益。

图5 展向壁面振荡减阻装置[45]Fig.5 Facilities for spanwise wall oscillation[45]
1.4 外部尺度控制方法
外部尺度控制方法主要以大涡破碎(large-eddy breakup,LEBU)装置为代表。LEBU 装置一般由在湍流边界层一定高度处沿流向水平布置的薄平板构成,平板厚约0.002δ、长约0.8δ,布置高度在0.1δ~0.7δ之间,属于被动控制方法,旨在抑制边界层中的法向速度脉动,同时产生更多的小尺度结构,以实现减阻目的[46-48](如图6 所示)。研究表明,采用LEBU 装置能够有效抑制大尺度外区结构,使黏性底层厚度增加,猝发事件频率降低,进而使湍流摩擦阻力减小约20%[28]。LEBU 装置无需能量输入,但其缺点在于在减小湍流摩擦阻力的同时,还会引入装置本身造成的型阻(属于压差阻力),同时该装置在实际边界层中的安装也较难实现。
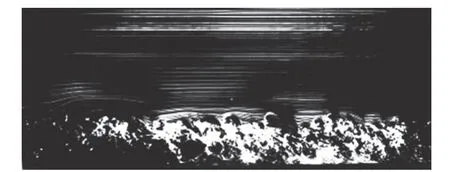
图6 LEBU 装置作用下的湍流边界层[48]Fig.6 Turbulent boundary layer under the effects of LEBU device[48]
2 等离子体湍流摩擦减阻方法概述
采用等离子体激励进行流动控制的研究始于20 世纪50 年代,研究者们利用射频放电产生等离子体进行高速飞行器的激波减阻研究[49-50]。随后,采用介质阻挡放电(DBD)等离子体激励进行流动控制的研究逐渐兴起[51]。1998 年,美国田纳西大学的Roth 等[52-53]采用DBD 对边界层进行了有效调控,引起了学界的广泛关注,自此,关于等离子体流动控制的研究大量涌现[23]。
典型的DBD 等离子体激励单元如图7 所示,包括DBD 激励器和高压电源两大部分。其中,DBD 激励器由两条交错布置的条状电极以及将二者隔开的绝缘介质层组成,当高压电源产生的高电压施加到电极上时,介质层表面的空气便会电离形成等离子体[54]。
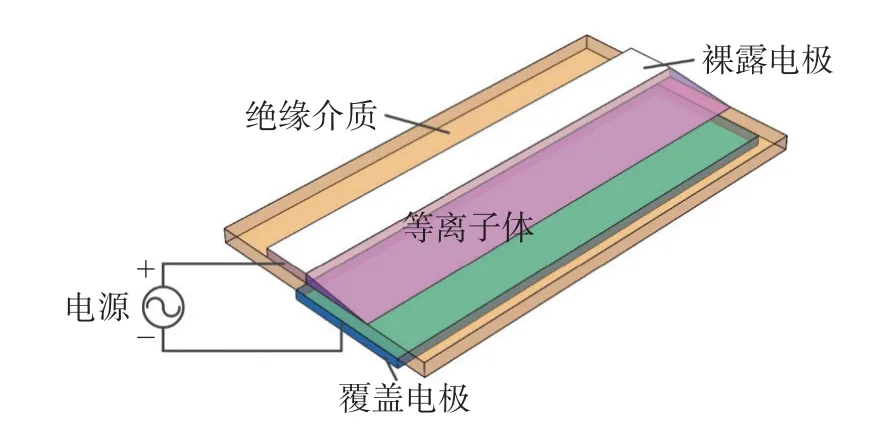
图7 典型的DBD 等离子体激励单元Fig.7 DBD plasma actuator unit
流动控制中,常用于驱动DBD 的高压波形主要有两种:正弦波高压(AC-DBD)[23]和高压纳秒脉冲(ns-DBD)[55]。大量研究表明,AC-DBD 主要通过持续的交变电场加速等离子体中的带电粒子,带电粒子与空气分子碰撞,从而在流场中产生射流和体积力作用[56-57]。AC-DBD 诱导的射流结构,如ns-DBD,由于其脉宽较小,无法有效加速带电粒子,因此无法产生体积力[58-59],但由于其脉冲上升沿很陡,能够在上升沿处产生极强的电离,从而能够在200 ns 左右的时间尺度内[60]产生60~160 K 的局部温升[55],此加热时间尺度小于流场的声学时间尺度(≈300 ns)[61],因此能够在流场中诱导产生压缩波。AC-DBD 诱导射流与ns-DBD 诱导冲击波分别如图8(a,b)所示[59,62]。

图8 DBD 诱导射流和压缩波结构Fig.8 The jet and pressure wave induced by DBD
此前,基于DBD 的流动控制研究大多集中在翼型与机翼的大迎角流动分离控制方面。当把DBD 激励器布置到机翼前缘时,AC-DBD 的射流和体积力作用(或称动量效应)与ns-DBD 的瞬时加热作用能够在机翼大迎角分离流场中诱导产生展向涡,使分离剪切层动态重附,或通过加速层流边界层转捩和促进内部流动掺混等途径抑制边界层分离,提高翼型大迎角状态下的升阻力性能[63-65]。研究表明,AC-DBD 与ns-DBD 诱导的动量效应与瞬时加热作用在翼型分离流场中的响应十分相似[66],但由于放电诱导速度的限制(<10 m/s)[67],AC-DBD 仅能在Ma<0.4 的情况下有效抑制流动分离[68],而ns-DBD 在Ma=0.74 时仍有显著的流动控制效果[55]。目前,经多年发展,采用DBD 进行大迎角分离控制的研究已能在小型无人机上成功应用,并进行了多次飞行验证,取得了良好的效果[69-70]。然而,该方法仅能通过抑制大迎角流动分离增大升力、减小机翼的压差阻力,在摩擦阻力主导的小迎角巡航状态下无法起到流动控制效果。由于客机、运输机、长航时无人机等多型飞机的绝大部分飞行时间均处于巡航状态,极少出现失速边缘的强分离、大迎角飞行,DBD 等离子体流动控制技术的上述特点严重限制了其工程应用。近年来,由于飞行减阻的强烈需求和DBD 的多种优势,采用DBD 进行湍流摩擦减阻的研究重新成为新的研究热点。
基于等离子体放电的灵活性,研究者们在借鉴多种湍流边界层控制方法的基础上,基于DBD 单元设计了不同的放电波形与电极结构,发展了多种等离子体湍流减阻方法,代表性的实验减阻效果如表1 所示。综合分析,上述等离子体湍流减阻方法主要可分为非定常方法和定常方法等两大类,具体阐述如下。

表1 不同等离子体湍流减阻方法的代表性实验减阻效果Table 1 Representative experimental results of different plasma-based turbulent drag reduction methods
3 非定常等离子体减阻方法
非定常等离子体减阻方法主要包括展向振荡放电激励和展向行波放电激励两种。由于与来流相比,等离子体激励诱导的射流速度很小,因此绝大多数非定常等离子体减阻方法均沿展向(即垂直来流方向)产生射流,以期产生更强的扰动。
2000 年,受展向壁面振荡湍流减阻方法的启发[78],美国麻省理工学院的Du 等[79-80]通过直接数值模拟(direct numerical simulation,DNS)研究发现,在湍流边界层中施加“展向行波”能够有效抑制甚至完全消除近壁面条带结构,使湍流摩擦阻力减小50%以上,同时,在近壁面施加展向振荡的流动也能使条带和涡结构显著减弱,如图9 所示。在数值模拟研究之外,他们还采用分布式的小电磁块,对展向行波和展向振荡流的减阻效果在盐溶液流动中进行了实验验证,实现了超消耗能量5 倍的能量节省,该成果在Science期刊上发表[79],并被《流体力学年鉴》重点介绍[81],引起了广泛关注。Du 等采用的“展向行波”和“展向振荡流”即为近壁面输运/振荡的体积力作用,这与AC-DBD 的作用效果不谋而合。
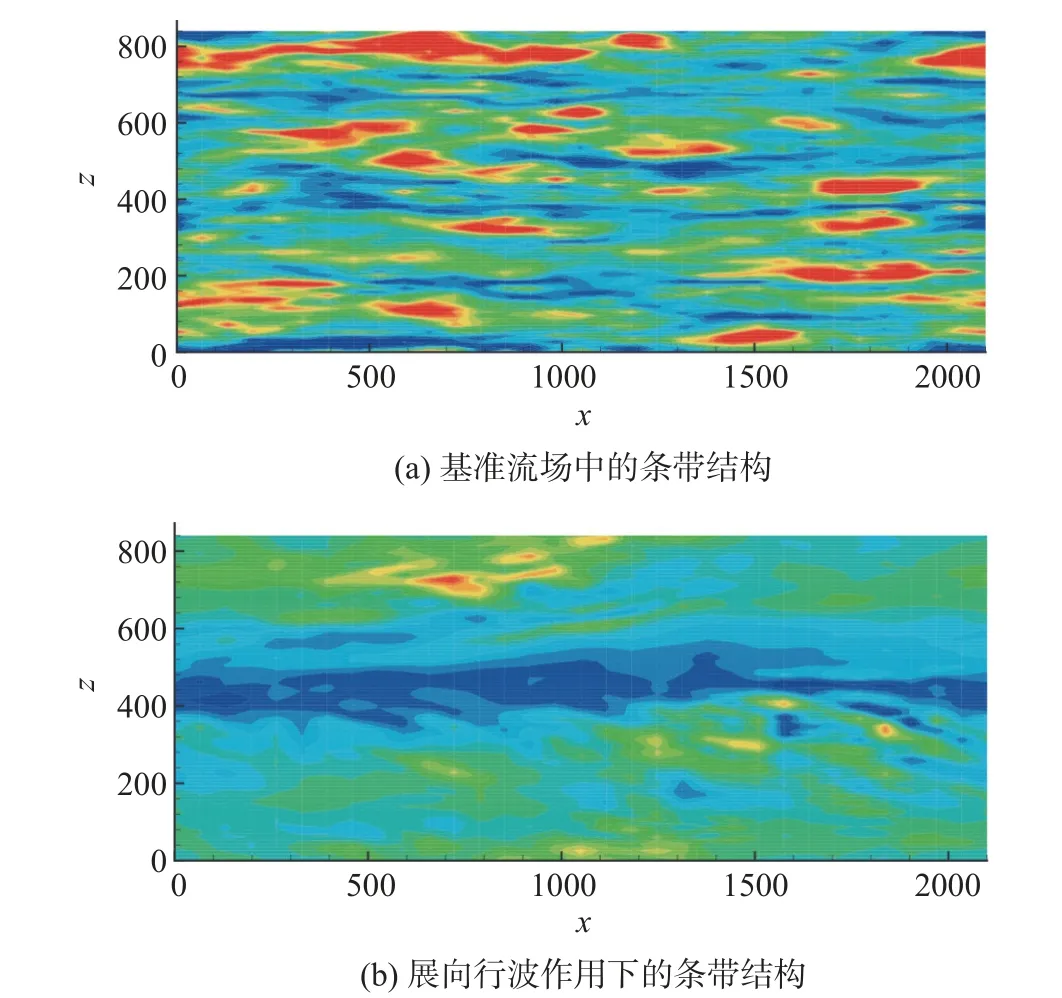
图9 湍流边界层中的展向行波对条带结构的影响[79]Fig.9 Influence of spanwise travelling waves to streaks in turbulent boundary layers[79]
3.1 展向振荡放电激励
在Du 等的研究之后,2003 年,NASA 兰利研究中心的Wilkinson[82]将两束正弦波高压叠加,形成一组占空调制的正弦波,然后在覆盖电极两侧各布置一条裸露电极,将两组反相的调制正弦波分别施加到两条裸露电极上,从而形成两侧交替放电的振荡DBD激励(如图10 所示),产生振荡的体积力,模拟展向壁面振荡和展向振荡流的作用效果。在此基础上,采用热线探针与皮托管对不同振荡频率下的DBD 诱导展向速度进行了测试,结果表明,随振荡频率的增大,放电诱导速度迅速衰减,放电诱导振荡仅能在低频情况下(<100 Hz)产生。因此,Wilkinson 得出结论:由于有效振荡频率和强度的限制,DBD 并不适合用于湍流减阻。随后,研究者们纷纷转向采用DBD 控制流动分离的研究。此外,近期Hehner 等[83-84]同样采用正弦波叠加的方法实现了振荡体积力,并对其特性进行了测试。
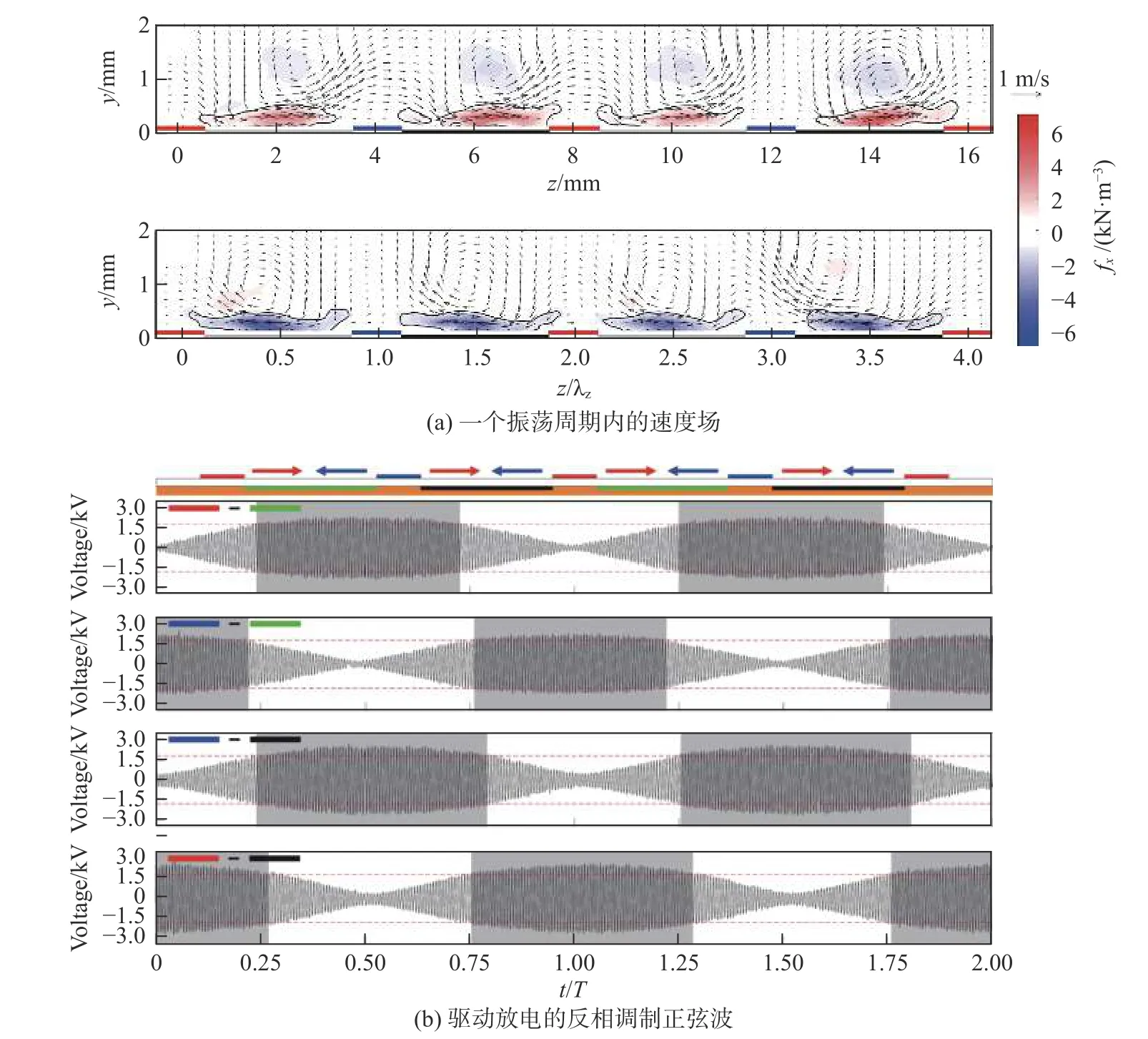
图10 展向振荡放电激励[83-84]Fig.10 Spanwise oscillating discharge actuation[83-84]
2006 年,英国诺丁汉大学的Jukes 和Choi 等[85]在摩擦雷诺数Reτ=uτδ/υ=380(来流速度U∞=1.8 m/s)的条件下,通过热线探针测量平板湍流边界层速度剖面,然后根据湍流边界层对数律对速度剖面对数区进行拟合,进而对振荡DBD 作用下的边界层湍流切应力进行了评估。结果发现,放电能够产生超过45%的相对减阻量,且减阻效果随振荡频率的增大而增强,显示出等离子体湍流减阻技术的巨大潜力。Jukes 推测等离子体激励的减阻机理为:在边界层中诱导流向涡,与边界层底层准流向涡相互作用,破坏近壁面自维持过程,并且破坏边界层底层与外区间的联系,抑制发卡涡的生成,从而使边界层底层湍流强度减小,扫掠和猝发事件减弱,进而实现减阻。
对于展向振荡放电激励,除在时间域上产生振荡体积力外,在空间上进行振荡放电同样能有效减阻。英国华威大学的Elam[86]基于文献[87]的DBD 模型,在Reτ=200 的条件下,采用DNS 的方法对比了时间和空间振荡的放电在湍流边界层中的减阻效果。结果表明,时间振荡的减阻效果优于空间振荡,使湍流切应力减小41%,且随放电单元展向间距的增大,减阻效果逐渐减弱。近期,瑞典查尔姆斯理工大学的Altıntaş等[88]也采用DNS 研究了流向空间振荡激励的减阻效果(如图11),在Reτ=180 和550 的条件下分别减阻13%和11%,减阻效果随激励器展向间距的增大而减弱,与Elam 的结论一致。
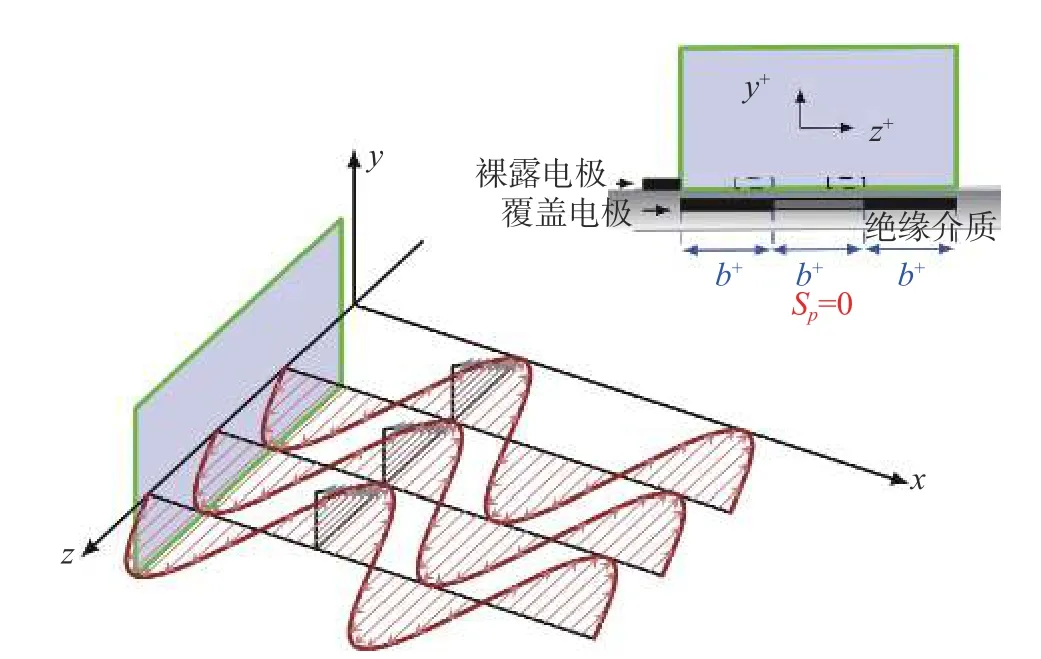
图11 沿流向空间振荡的等离子体激励[88]Fig.11 Plasma actuation oscillating in the streamwise direction[88]
展向间距和振荡频率是影响振荡DBD 减阻效果的关键参数。Jukes 等[85]的研究表明,减阻效果随有效振荡频率的增大而不断增强,且激励器展向间距越小,减阻效果也越好。英国帝国理工学院的Mahfoze等[89]的DNS 研究发现,Reτ=475 时,大展向间距的振荡放电使摩擦阻力增加75%,而仅打开一侧的放电则能使阻力减小33%;放电通过抑制高速流体的扫掠来抑制湍流的产生,进而减小摩擦阻力。近期,米兰理工大学的Alessio[90]进一步对不同展向间距的振荡放电进行了对比,并进一步强调了提高振荡放电强度与有效频率的必要性。
为提高振荡放电的有效频率,空军工程大学团队[91]采用锁相二维粒子图像测速(two-dimensional particle image velocimetry,2D-PIV),对振荡DBD 诱导流动的形成机理、演化规律和频率特性进行了研究与优化,并基于动量方程建立了振荡DBD 诱导射流特性的解析模型。结果表明,随振荡频率的增加,射流发展时间和射流传播距离缩短,放电诱导流场由周期性振荡的展向射流转变为稳定在激励器中间的准定常法向射流,其展向射流速度与影响范围均迅速减小。在此基础上,对解析模型进行了验证,并提出了振荡DBD 激励器的设计准则:在设计激励器时,应使射流传播距离尽量大,并满足射流传播距离大于低压电极宽度的一半。
3.2 展向行波放电激励
除展向振荡放电外,受Du 等[79-80]的研究启发,Choi 等[71]采用多个正弦波电源依次驱动展向DBD阵列的各个单元,实现了如图12 所示的展向输运体积力作用(即展向行波),并在与文献[85]相似的来流状态下(Reτ=475、U∞=1.75 m/s),采用相同的流动测试方法对振荡和行波DBD 阵列对湍流边界层及其壁面切应力的影响进行了研究。结果表明,行波DBD阵列也能产生与振荡DBD 相似的减阻效果,使壁面切应力减小45%。Choi 认为,放电诱导涡结构在展向行波放电减阻中起重要作用,但具体机理并不明确。

图12 静止条件下DBD 诱导的展向行波[71]Fig.12 Spanwise travelling waves induced by DBD in quiescent air[71]
对于展向行波放电激励,Whalley 等[92-93]采用PIV、热线风速仪等多种测试手段对放电诱导流动特性及其对湍流边界层的影响进行了系统研究。结果表明,在静止条件下,放电产生沿展向运动的单个启动涡,其运动距离可达100 mm;在平板湍流边界层中(Reτ=435、U∞=1.7 m/s),放电产生的展向输运的流向涡将黏性底层的低速流体沿展向铺展[94],同时使边界层原有的流向涡合并,导致近壁面低速流体在合并后的流向涡的诱导作用下抬升,并绕此流向涡运动[95],从而形成宽大的低速流体带,使近壁面低速条带消除。该实验结果与Du 等[79]与Huang 等[96]的DNS 结果相似。在摩擦阻力层面,上述低速流体带处的壁面切应力与基准状态相比发生强烈的展向扭曲,与Zhao 等[97]基于柔性壁面实现展向行波减阻的DNS 结果一致。
目前,关于展向非定常式等离子体减阻方法的研究普遍能够产生超40%减阻效果,显示出等离子体湍流减阻方法的潜力。但是,由于等离子体激励强度本身的限制以及高频振荡下放电诱导展向速度的衰减作用,当前采用非定常式等离子体减阻方法的有效来流速度均仅为U∞=1~2 m/s;同时,在能量方面,放电消耗的能量超过其通过减阻所节省的能量的1×104倍[85],离实际应用尚有较大差距,因此还需对激励强度和减阻效果作进一步优化。
4 定常等离子体减阻方法
定常等离子体减阻方法是指不对放电波形进行调制,直接沿展向持续放电的减阻方法。与非定常方法相比,定常方法产生的时均扰动更强,将射流沿展向和流向布置均能有效减阻,因此其主要可分为展向定常减阻方法和流向定常减阻方法两大类,其中展向定常等离子体减阻方法可进一步分为展向单侧放电激励和展向对冲放电激励两种类型。展向单侧放电激励指仅在覆盖电极一侧放电产生等离子体,形成如图13(a)所示的单侧沿面射流,在边界层中产生类似展向吹气的作用效果;而展向对冲放电激励指在覆盖电极两侧同时产生等离子体,形成如图13(b)所示的对冲作用,在边界层中产生类似法向吹气的作用效果[26]。

图13 静止条件下的展向单侧放电与展向对冲放电[98]Fig.13 Unidirectional and impinging discharge in quiescent air[98]
非定常等离子体减阻方法主要基于高压波形的调制方式进行区分,但上述各类型的定常等离子体减阻方法的区别主要在于激励器的构型和布置形式。在驱动激励器工作的高压波形方面,采用高压正弦波(AC-DBD)或脉冲直流高压(pulsed-DC DBD)驱动相应激励器工作,均可实现上述不同类型的定常等离子体激励。为与上文保持一致,本节仍采用基于高压波形的分类进行阐述。
4.1 基于AC-DBD 的展向定常放电激励
1998 年,Roth 等[52-53]进行DBD 边界层调控时即采用了对冲式的展向定常等离子体激励方法,然而其结果表明,在雷诺数为1 × 105~1 × 106时展向对冲放电激励将使平板阻力增加。近年来,展向定常放电激励的减阻效果才逐渐显现。
哈工大深圳研究生院的周裕教授团队[99]基于AC-DBD,采用测力、PIV、热线风速仪等多种测试手段,对不同间距的展向对冲放电激励和展向单侧放电激励在平板湍流边界层中的减阻效果开展了大量研究。结果表明,大间距的展向对冲放电激励减阻效果最好,且减阻效果随激励器流向长度的增大而增强,在U∞=2.4 m/s 时能够减阻24%~26%[72,100-102]。放电在边界层中诱导方向相反的流向涡,稳定低速条带并使其向中间靠拢,形成狭长的低速条带群(如图14 所示),在降低湍动能生成的同时减小流速,从而实现减阻的目的[72,101]。上述展向对冲放电聚拢条带结构的作用与Roth 等的报道一致[52-53],但由于流场与放电条件的不同,减阻效果也不同。为进一步降低系统能量消耗,该团队对放电波形进行占空调制,并对减阻效果进行了测试。结果表明,占空调制放电激励将使低速条带不断聚拢分散,形成波浪式的条带分布,此时的减阻效果较定常放电激励弱,但由于占空比的影响,消耗功率更低[101]。近期,该团队还将前馈的比例微分控制系统引入到湍流减阻实验中,系统以最佳方案对激励器放电电压进行调节,在几乎不影响减阻效果的基础上使放电功率减小30%[103]。

图14 展向对冲放电聚拢低速条带[72]Fig.14 Low-speed streaks gathered by the impinging plasma discharge[72]
西北工业大学的郑海波[104]采用热线测速的方法研究了放电频率对展向对冲放电激励的减阻效果的影响,结果表明,存在最佳放电频率200 Hz,在U∞=10.7 m/s 时实现7.4%的局部相对减阻量。
为探究等离子体激励减小平板湍流摩擦阻力的作用机理,空军工程大学团队[75,98]基于高分辨的Stereo-PIV 方法,对振荡放电、展向单侧放电、展向对冲放电三种激励方式在湍流边界层中诱导的流动结构、壁面切应力时空分布、湍流统计量、湍流猝发行为特征的变化进行了研究与对比。结果表明,三种激励方式均能在湍流边界层中诱导出比近壁面准流向涡尺度更大的流向涡,尽管该流向涡系的三维结构因激励方式而异,但均在湍流边界层中产生了明显的上扫和下洗作用,二者分别与减阻和增阻效果相对应,如图15 所示。湍流边界层中的阻力变化主要是由激励诱导流向涡带来的动量输运造成,黏性项和湍流输运项的影响相对较小。在此基础上,建立了等离子体激励作用下的流向涡输运模型,模型计算与实验结果吻合良好,进而实现了对等离子体激励控制边界层及其摩擦阻力的作用效果的预测,为等离子体湍流减阻激励设计与效能评估提供了支撑。
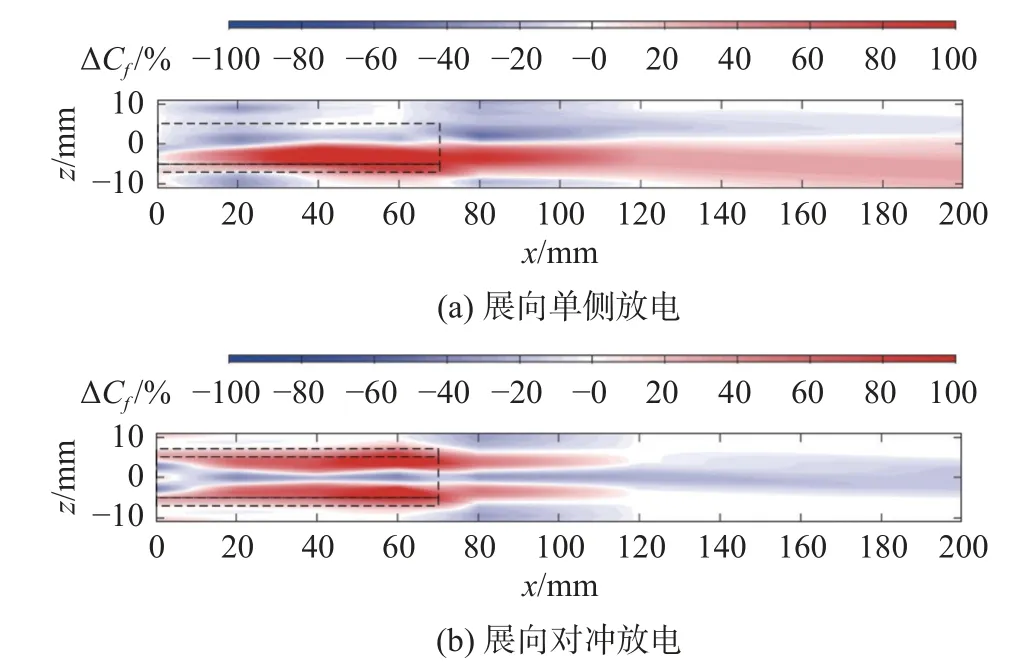
图15 等离子体激励诱导的阻力变化[75]Fig.15 Drag variation induced by plasma actuation[75]
4.2 基于脉冲直流DBD 的展向定常放电激励
在展向定常等离子体减阻的研究中,除典型的AC-DBD 外,还有一种新型放电波形,即脉冲直流(Pulsed-DC)放电波形。该波形于2016 年由美国圣母大学的McGowan 等[105]提出,并用于驱动DBD 激励器。在放电电路中,将激励器裸露电极始终保持直流高压不变,低压电极在连接直流高压的基础上周期性接地,即可形成如图16 所示的脉冲直流波形。McGowan 等[105]的研究表明,使用该放电波形驱动DBD 能够产生高达300 mN/m 的体积力,比相似参数下的典型AC-DBD 诱导体积力(约10 mN/m[56-57,67,106])高1 个数量级。随后,McGowan 等[105,107]将其应用到压气机叶片的流动分离控制中,并取得了良好的效果。

图16 脉冲直流放电的电压电流波形[76]Fig.16 Voltage and current waveform of Pulsed-DC DBD[76]
2019 年,同一团队的Thomas 等[76]将Pulsed-DC DBD 应用到湍流减阻中,将激励器电极在平板湍流边界层中沿流向布置,采用高精度测量传感器(量程0.5N,精度0.08%),直接测量单侧定常和双侧对冲两种激励方式下的湍流摩擦阻力变化。结果表明,U∞=17.4 m/s 时,激励使平板摩擦阻力减小70%以上,而当来流速度提高至U∞=52.1 m/s 时,仍能产生约18%的减阻效果。放电电压越大,激励器单元展向间距越小,减阻效果越好。同时,由于所测得的Pulsed-DC DBD 功耗极小(<1 W/m),放电通过减阻节省的功率可达所消耗功率的3 倍以上,如图17 所示。该项研究成果是惊人的,其将等离子体湍流减阻方法的有效来流速度提高了1 个数量级,接近实际小型无人机的巡航速度,同时也实现了显著的净能量节省。

图17 脉冲直流放电减阻产生的能量节省[76]Fig.17 Net power saving in turbulent drag reduction using Pulsed-DC DBD[76]
随后,该团队对脉冲直流放电特性及其湍流减阻机理进行了进一步研究。结果表明,在放电特性方面,Pulsed-DC DBD 能够诱导产生12 m/s 的瞬时速度,同时产生半圆形弱压缩波[76]。Sontag 等[108]采用Shack-Hartmann 波前传感(wavefront sensor WFS)方法对Pulsed-DC DBD 在静止条件下的诱导速度进行了研究,发现放电诱导对流速度仅有0.96 m/s,同时其对边界层的影响并不显著,该结果与McGowan[105]与Thomas[76]等的实验并不相符。
在减阻机理方面,Duong 等[109]的研究表明,放电使边界层速度脉动整体降低,通过基于热线测量的变量间隔时间平均(variable interval time averaging,VITA)的条件采样分析[110]发现,放电有效减小了上抛和猝发事件的频率,但对扫掠事件影响不大[109],而对热线数据的脉动速度象限分析表明放电同时减小边界层扫掠和上抛事件的频率[111]。Duong 等[112]提出采用Pulsed-DC DBD 减小湍流摩擦阻力的预期机理为:放电在边界层底层诱导展向射流,减小该处垂直于壁面的涡量分量,在条带瞬态增长(streak transient growth,STG)过程中抑制近壁面准流向涡的生成,进而破坏近壁面自维持过程,同时抑制条带结构的产生,减小湍流生成与壁面切应力。Cain 等[113]通过改变边界层的湍流涡黏度,采用雷诺平均N-S 方程(RANS)方法模拟了Pulsed-DC DBD 使摩擦阻力减小后对民机和无人机模型飞行性能的影响,结果表明,放电能使民机燃油消耗减小12%以上,或使无人机作战半径翻倍。
上述基于Pulsed-DC DBD 的研究取得了显著的控制效果,吸引了国际上的广泛关注,然而除美国圣母大学外,尚未有其他团队对该结果进行有效重复或验证。相反,日本东京农工大学的Nakai 等[114]的研究表明,与圣母大学的结果不同,Pulsed-DC DBD 产生的体积力仅为O(0.1 mN/m)量级,诱导射流速度也小于1 m/s。在减阻效果方面,美国普林斯顿大学的Starikovskiy 和莫斯科物理技术研究院的Aleksandrov等[115]在其综述文章中分析称,按文献[76]所示规律对曲线进行少量延伸即会得到负阻力(超100%的减阻效果,如图18 所示),这显然是不符合物理规律的。Starikovskiy 等[115]认为,上述问题可能是等离子体激励在平板表面诱导的流动分离干扰阻力测试而造成的,文献[76]的准确性及其结果产生的具体原因还需进一步验证与研究。

图18 脉冲直流放电减阻曲线延伸产生负阻力[115]Fig.18 Negative drag produced by extending the drag reduction curves of Pulsed-DC DBD[115]
为验证Pulsed-DC DBD 诱导体积力与减阻的能力,揭示作用机理,空军工程大学团队[116-117]从放电特性、诱导射流形态、体积力、冲击波和加热特性等多个角度对Pulsed-DC DBD 进行了综合诊断与分析,并采用高分辨Stereo-PIV 对Pulsed-DC DBD 与湍流边界层的相互作用进行了分辨。结果表明,Pulsed-DC DBD 的放电功率与典型的ns-DBD 类似,处在O(10 W/m)量级,而其诱导体积力总体较同等参数下的AC-DBD 低,处在O(1 mN/m)量级。Pulsed-DC DBD 能在放电两侧同时诱导沿面射流,同时产生冲击波,但其最大射流速度仅在O(0.1 m/s)量级,该速度量级与Sontag 等[108]的结果一致。Pulsed-DC DBD诱导冲击波、射流和体积力的机理为:在陡前沿处将空气快速电离产生等离子体,短时间内释放大量热量,并诱导产生冲击波;随后,等离子体中的带电粒子在电压缓慢下降阶段的高压维持电场中加速并与空气分子碰撞,产生动量效应。Pulsed-DC 波形中的快前沿和大脉宽是其驱动DBD 产生动量效应的主导因素,其高压直流的作用并不关键。上述拥有快前沿和大脉宽的高压波形称为“快升缓降”(fast-riseslow-decay,FRSD)波形[117]。
在减阻效果与机理方面,Pulsed-DC DBD 对湍流边界层的作用效果与AC-DBD 基本相同,均是通过在边界层中所诱导的流向涡带来的动量输运改变壁面摩擦阻力,而黏性项和湍流输运项对阻力的影响相对较小[75,98]。
4.3 流向定常等离子体减阻方法
流向定常等离子体减阻方法是指不对放电波形进行调制,直接沿流向持续放电的减阻方法,可分为逆气流放电激励、顺气流放电激励以及双侧放电激励等类型。除展向定常激励外,Roth 等[52-53]同样采用了流向定常激励进行边界层调控。结果表明,逆气流激励使平板摩擦阻力增大,而顺气流激励使阻力减小,阻力减小量与激励阵列诱导的体积力之和相近,在来流速度约4.5 m/s 时减阻65.1%,如图19 所示,图中Erms=3 kV 表示激励器上的电压的均方根为3 kV。上述减阻效果可理解为激励产生的推力对阻力的直接抵消。
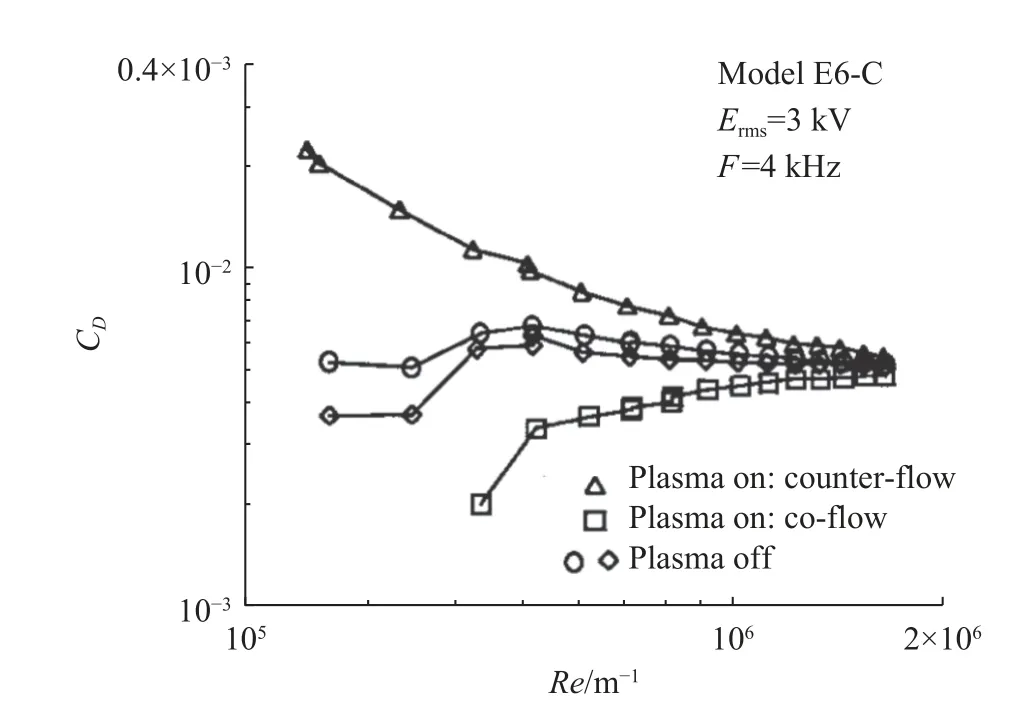
图19 流向射流等离子体激励减小平板摩擦阻力[53]Fig.19 Friction drag reduction of a flat plate by streamwise plasma actuation[53]
2019 年,西北工业大学的武斌等[118]将阵列式AC-DBD 诱导射流沿流向布置于平板湍流边界层中,采用热线风速仪对流向定常放电下游的边界层速度剖面进行测试,并对速度剖面对数区进行拟合,计算壁面切应力,研究放电对平板摩擦阻力的影响。结果表明,与Roth 等[52-53]的结果不同,逆气流与顺气流激励均能减阻,且逆气流放电的减阻效果比顺气流放电更好,U∞=14.1 m/s 时使局部湍流切应力减小8.78%。激励能够使边界层底层速度减小,但更具体的减阻机理仍需进一步研究。
由于DBD 诱导射流速度有限[67],同时边界层中流向速度远大于展向速度,因此,与展向放电方法相比,流向定常等离子体减阻方法也存在控制效果随来流速度的增大而迅速衰减的问题。
5 翼型等离子体湍流减阻的探索
除在平板上的零压力梯度的湍流边界层(zero pressure gradient turbulent boundary layer,ZPGTBL)中进行研究外,为将等离子体湍流减阻技术推向应用,研究者们还进行了压力梯度条件下的湍流减阻以及巡航迎角状态下的翼型减阻研究。
在有逆压梯度(adverse pressure gradient,APG)的平板湍流边界层中,美国圣母大学的Yates 等[77]采用对数区速度拟合的方法计算阻力,研究了Pulsed-DC DBD 的减阻效果。结果表明,逆压梯度为223 Pa/m、U∞=27.1 m/s 时,减阻效果仍可达42%。西北工业大学的李跃强等[73]采用MEMS 热膜方法测试了Ma=0.3~0.5 范围内、贴附在NACA0012 翼型表面的双侧对冲式AC-DBD 激励器下游的摩擦阻力(如图20),这是等离子体湍流减阻方法在翼型上的首次尝试,但遗憾的是并未取得减阻效果。

图20 翼型等离子体湍流减阻实验模型与MEMS 热膜传感器[73]Fig.20 Airfoil model and MEMS hot-film[73]
空军工程大学团队[74-75]将展向阵列DBD 应用到0°与6°迎角下的NACA0012 翼型上,基于尾迹测量,对单侧定常放电、双侧对冲放电、振荡放电作用下的翼型总阻力的变化规律进行了研究,并初步探讨了翼型减阻机理。结果表明,当来流速度为U∞=5 m/s 和20 m/s 时,单侧定常放电激励可分别使翼型总阻力减小64%和13.7%;双侧对冲放电激励使阻力略有增加;振荡放电激励则介于二者之间,且随振荡频率的增大,减阻效果减弱。
进一步,基于射流速度(v)、来流速度(U∞)和展向电极组间距(L)等参数,构建了反映空间尺度影响的无量纲电极组间距(L+=L/δυ)和反映激励强度影响的射流速度比(r=v/U∞)等无量纲参数,并提炼了影响翼型减阻量的无量纲相图(如图21 所示)。结果表明:r较小时(r< 0.05),激励强度过弱,无法对阻力产生影响;r> 0.05 时,在对数坐标系下,阻力变化量随r和L+线性增加;r=0.05 属于状态的边界,可归于影响较小的区间。基于上述参数影响规律,对减阻量构成、湍流减阻机理和减阻效率进行了分析,相关结论可为翼型等离子体湍流减阻系统的优化设计提供理论支撑。等离子体湍流减阻技术的发展历程可初步总结为图22。
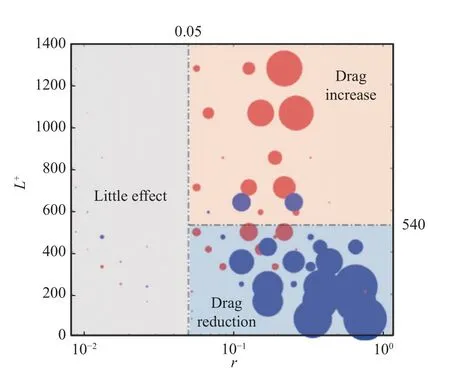
图21 翼型等离子体湍流减阻无量纲相图[74]Fig.21 Dimensionless map for airfoil drag reduction[74]

图22 等离子体湍流减阻技术发展历程Fig.22 Development history of plasma-based turbulent drag reduction method
6 展 望
本节从激励方法、应用环境与控制策略三个方面对等离子体湍流减阻技术的发展进行展望。
6.1 激励方法:发展新型高效能等离子体减阻激励方法
湍流减阻的目的在于节约能耗,进而增大飞机的航程和航时、减少燃油燃烧带来的环境污染和碳排放。因此,对于等离子体激励等主动湍流减阻方法而言,以更小的能耗产生更强的减阻效果(即更高的效能)是其永恒的发展目标。
激励方法是减阻效果产生的根源。在现有的主动湍流减阻方法中,虽然等离子体湍流减阻装置的结构重量大大简化,但是由于其有效减阻来流速度低,目前基于AC-DBD 的等离子体湍流减阻方法所能实现的能量收益极其有限;而脉冲直流激励虽然减阻能量节省效果显著,但其效果尚未得到验证。因此,发展新型高效能等离子体减阻激励方法成为提高等离子体湍流减阻效能的根本途径,也是当前等离子体湍流减阻技术发展的首要需求。
解决上述问题主要有以下两个方向:一是基于现有减阻机理,提高等离子体激励的产生效益;二是创新减阻机理,发展新型等离子体激励方式。
首先,在提高等离子体激励本身的产生效益方面,综合上文分析可见,各类等离子体湍流减阻方法均是通过在流场中产生各种形式(流向、展向;定常、非定常)的动量效应(射流与体积力作用)以实现减阻效果。因此,基于现有减阻机理,通过优化等离子体激励驱动波形、改进等离子体激励器结构等方法提高激励本身产生动量效应的效能是提高减阻效能最直接的方法。例如,文献[105,117]中针对脉冲直流、快升缓降等波形的研究即是在波形优化方面的尝试,文献[91]对振荡放电高频工作特性的优化则是面向激励系统的整体提升。除上述方法外,还可通过减小激励器裸露电极宽度从而增强放电区域电场,来提高体积力产生效益;或通过增大激励器组密度等方法,提高单位面积内的放电长度,增大单位减阻面积内的体积力强度,从而实现更强的减阻效果。
其次,在发展新型等离子体激励方式、创新减阻机理方面,基于等离子体激励的灵活性,可以广泛借鉴其他主/被动湍流减阻方法的作用机理,并采用等离子体激励进行模拟与实现,在现有的等离子体激励产生效益的基础上,创新减阻途径,实现提高减阻效能的目的。例如,可以通过设计方格网状的裸露电极,通过方格电极四周向中央放电的对冲作用,产生法向射流,模拟微吹气减阻的作用效果,如图23 所示;或通过设计小型的环形电极单元,模拟粗糙元或壁面凹坑的作用效果,以期进一步提高等离子体湍流减阻效益。
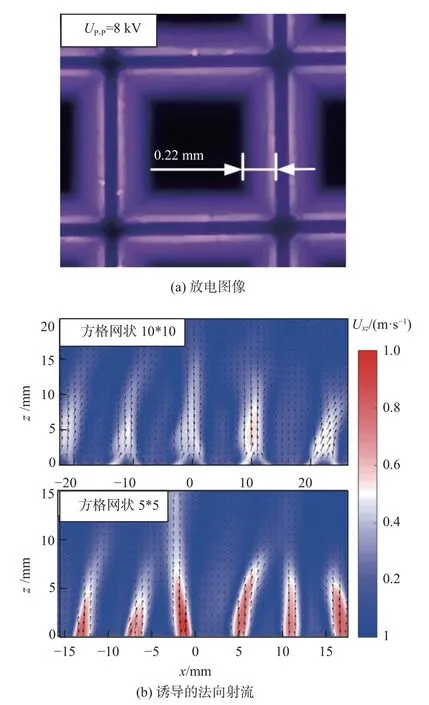
图23 方格网状等离子体激励器及其诱导的法向射流Fig.23 Grid-type plasma actuator and the induced vertical jet flow
6.2 应用环境:面向高雷诺数强逆压梯度气流环境进行拓展
当前,绝大多数的等离子体湍流减阻研究均在理想的零压力梯度平板湍流边界层(ZPGTBL)中进行,但在飞机的实际飞行中,由于弯曲型面与飞行迎角的存在,湍流边界层均面临强烈且复杂的压力梯度,上述ZPGTBL 的理想情况几乎不存在。在实际飞行条件下,受压力梯度带来的黏性尺度与湍流脉动变化等因素的影响,等离子体湍流减阻效果将有所降低[77]。此外,除基于脉冲直流放电的研究外,大多数等离子体湍流减阻研究均以探寻机理为目标,所采用的来流速度仅为O(1 m/s)量级,与实际工程应用相差甚远。因此,面向高雷诺数、强逆压梯度气流环境的研究是等离子体湍流减阻技术走向应用前的必经之路。在复杂压力梯度条件下如何提高湍流减阻效果?在巡航迎角工况的翼型或机翼上,等离子体激励对各部分阻力(摩擦阻力、压差阻力等)的影响如何?这些是亟待回答的问题。
针对翼型减阻问题,文献[74-75]进行了一定的探索,验证了等离子体激励在巡航迎角工况下有效减小翼型总阻力的能力,并阐明了无量纲参数影响规律,证明了等离子体湍流减阻方法在翼型流场等较复杂情况下的应用前景,但等离子体激励对各部分阻力的影响还需进一步研究,作用机理也需进一步揭示。为提高等离子体激励在压力梯度条件下的作用效果,可以根据湍流边界层黏性尺度的变化,适应性地改变等离子体激励的空间尺度,始终保证二者的匹配关系,进而实现更高效的减阻。
6.3 控制策略:由开环控制向智能自适应发展
与展向壁面振荡、吹/吸气等主动湍流减阻方法不同,等离子体湍流减阻方法是基于电信号的方法,具有响应快、控制灵活等优点。在当今人工智能与控制技术飞速发展的时代,将以往等离子体湍流减阻中的开环控制向智能自适应控制发展,能够充分发挥等离子体减阻技术的优势,提高减阻效能,是必然的发展趋势。
目前,研究者们已对采用自适应控制方法优化等离子体湍流减阻效果进行了初步探索。文献[103]将如图24 所示的前馈比例微分控制系统引入湍流减阻的控制与优化中,保证系统以最佳方案对激励器放电电压进行调节,在几乎不影响减阻效果的基础上,使放电功率减小30%,图中G(s)表示经过滤波后的脉动压力信号y(t)的拉普拉斯变换。文献[119]基于遗传算法(如图25)与代理模型等多种方法,对振荡放电等离子体激励的电压、频率、相位、占空比等多个参数进行智能优化,实现了40%的减阻效果,能量效益也得到极大提升。上述工作是控制与优化算法在等离子体湍流减阻上的初步应用。

图24 湍流减阻中的前馈的比例微分控制框图[103]Fig.24 Diagram of the feed-forward PD control scheme in turbulent drag reduction application[103]

图25 基于遗传算法的等离子体减阻激励参数优化方法[119]Fig.25 Parametric optimization of plasma actuation based on genetic algorithm[119]
后续,等离子体湍流减阻方法向智能自适应发展的重点是:基于人工智能方法(如深度强化学习等),进一步对控制参数与策略进行优化,形成适应变化流动场景的高效益减阻激励控制律,实现等离子体湍流减阻的自适应控制。等离子体湍流减阻在智能流体力学领域的发展以及人工智能技术的引入,将使等离子体湍流减阻技术焕发出更大的活力。
7 结论
等离子体激励具有结构简单、响应快、易于智能控制等众多优点,将等离子体激励应用于飞机湍流摩擦减阻中,受到广泛关注。
1)按照等离子体激励特性及其与来流的相互关系,等离子体湍流减阻方法可分为展向非定常、展向定常、流向定常激励等类型。从研究历程看,初期研究主要集中在展向非定常激励,后将激励简化为展向与流向定常激励。
2)在平板湍流边界层中,等离子体激励主要通过诱导大尺度流向涡,产生输运作用,减小摩擦阻力,其能使摩擦阻力减小40%以上;在摩擦阻力主导的巡航迎角工况下的翼型上,激励同样能在20 m/s 的来流速度下使翼型总阻力减小13.7%,但离实际应用还有一定差距,具体减阻构成与作用机理尚需实验验证。
3)为将等离子体湍流减阻技术向应用拓展,需要发展新型高效能等离子体减阻激励方法,面向高雷诺数、强逆压梯度气流环境进行适应性拓展研究,提高等离子体激励的产生效率,探索新型减阻机理,研究等离子体激励对翼型、机翼及整机阻力的综合影响及其机理,提高总体减阻能量效益。
4)在人工智能应用快速发展的现今时代,等离子体激励作为纯电驱动的流动控制方法,具有响应快、控制灵活等优点,与其他流动控制方法相比,能够更加便利地与人工智能技术相结合,进一步优化控制参数与控制策略,实现减阻自适应控制,使等离子体湍流减阻焕发更大的生机与活力。
