爆炸激波管出口流场特征的纹影诊断与分析
2023-11-01黄含军毛勇建黄海莹
张 军, 黄含军, 毛勇建, 黄海莹, 郑 星, 杨 茂
(中国工程物理研究院 总体工程研究所,四川 绵阳 621999)
1 引 言
鉴于军事冲突中爆炸装置的大量使用以及爆炸灾害事故频发,爆炸冲击波造成的生命伤害和财产安全受到广泛关注。激波管可用于复现爆炸场景,进而更好地在实验室内开展爆炸冲击波毁伤效应研究。高能炸药驱动式激波管是当前获得高达数十兆帕超高压冲击波、满足较真实的爆炸动压/静压比的重要途径[1-3]。在该类激波管设计中,关键难题在于如何在实验段内得到与爆炸产物分离、且波阵面平整的冲击波,并有效构建冲击波载荷参数与管道结构、起爆炸药参数之间的关联预示关系[4]。
爆炸流场的特征测量是数值模型验证、确认试验成功与否的重要基础。传统接触式电测法能够得到爆炸流场中离散点的压力特征,却无法满足冲击波波阵面形态、与爆炸产物运动分离现象等的测量[5-6]。同时,传统压力测量方法需以爆炸流场形态的先验预判为基础,实验测量准确性还需结合最终的流场特征综合研判,如波阵面是否与传感器敏感面垂直或平行、是否存在爆炸高温漂移[7-8]、产物撞击耦合的附加干扰和振荡输出[9-10]等。对于炸药驱动激波管而言,爆炸多相流产物和冲击波具有高温、高压、高瞬态特征,同时存在冲击波反射、汇聚等复杂现象,因此为满足爆炸激波管的理论设计和试验验证需求,亟需在传统电测方法基础上进一步探寻新的测量途径。
阴影法、纹影法等非接触光学测试方法具有对流场干扰小、硬件布置简单易用等优点,广泛应用于流场形态的可视化观测。随着激光光源、计算机和数字图像等硬件技术的快速发展,该技术已逐渐实现流动介质运动速度、温度等参数的定量分析[11-14]。在冲击波观测与定量诊断应用方面,当前研究主要集中在炸药或弹丸自由空气场爆炸后的冲击波纹影图像分析上[15-16]。相比于自由场,激波管内由于管道壁的约束,爆炸冲击波形成和波系结构的演化规律更加复杂,不过激波管内炸药爆炸流场的可视化观测与定量测量工作却鲜有报道。胡洋等[17]针对矿井瓦斯/空气预混气体爆燃流场问题,在燃气驱动激波管基础上设计了“Z”字形光路的高速激光纹影,并获得了出口的爆燃流场演化图像。该工作为炸药爆炸激波管出口流场诊断提供了较好的借鉴。但相比可燃气体等燃烧或爆燃反应,由于炸药爆炸反应时间更短(炸药反应μs 量级,发射药管内反应ms 量级、燃气燃烧或爆燃甚至在100 ms 量级以上[18]),其瞬态流场演化特征诊断还需充分考虑高速成像的响应灵敏度,并对爆炸伴随的火光、高量级结构波动等非冲击波响应进行有效的识别和处理。
本文通过高速数字化CCD 相机并结合系列光学元件,在小型爆炸激波管装置的基础上,利用平行光纹影成像原理搭建了基于激光光源的高速、高灵敏度、远距离、与起爆系统和压力测试同步的纹影测量系统,从而实现管道出口流场特征的精密诊断,并对出口流体动力学现象进行了分析,为理解爆炸激波管中冲击波形成与演化规律提供图像依据。
2 原 理
纹影法通过光线在非均匀介质中的偏折以及到达相机的光强变化来分析流场特征。
2.1 光的折射
光线在空气或其他气体中的折射率n与介质密度ρ满足Gladstone-Dale 关系。具体表达式如下:
式中k为可见光的Gladstone-Dale 系数。
在三维空间中,当光线沿流场某方向传播(设为z向)时,会在垂直于传播方向的投影平面内(设为xy平面)发生偏析,其沿x,y方向的偏转角εx,εy的光学方程式分别为:
2.2 基本原理
在典型的纹影光路中(如图1 所示),点光源通过透镜形成平行光,由透镜2 焦点处的刀口控制进入成像屏幕的进光量。当观测路径上为均匀介质时,屏幕表现为均匀光强(设为I0)的初始图像。初始光强与光源强度(设为Is)、刀口处的初始成像面积相关,具体表达式为:
图1 透射式纹影基本原理示意图Fig.1 Principle of transmission schlieren system
式中:k为光强在光源至成像屏幕传播路径中的衰减系数,f2为透镜2 的焦距,w,h分别为在xy平面的成像宽度和高度。
当冲击波等介质扰动导致光线偏折εx,εy角度后,光源的成像宽度和高度将变化Δw,Δh,成像尺寸变化示意图见图2。表达式分别为:
图2 成像面积变化示意图Fig.2 Variation of imaging area
根据式(4),在成像屏幕上出现介质引起的光强相对变化ΔI/I0可表示为:
忽略二阶小量的情况下,式(7)近似为:
2.3 激波管流场参数特征与图像处理
相比空气,在炸药驱动激波管内产生的冲击波和爆炸产物具有不同的密度特征,这是纹影观测与分析的基础。图3 给出了激波管组成示意图。

图3 爆炸激波管组成示意图Fig.3 Sketch of blasting shock tube
理想状态的激波管出口流场载荷预期是与爆炸产物分离、波阵面相对平整、具有特定压力峰值和正压持续时间的理想冲击波,具体见图4。一维假设下,平面冲击波的密度、压力和速度之间近似满足Rankine-Hugoniot 关系[19],即:
图4 理想爆炸激波管流场演化状态示意图Fig.4 Ideal flow field evolution of blasting shock tube
式中:p2,ρ2为冲击波波阵面后的压力和密度;p1,ρ1为波阵面前的压力和密度;γ为管道初始气体的比热比,v0为声速,vs为激波运动速度。
激波管设计的关键在于利用整形段实现冲击波与产物分离以及波阵面的平整化。倘若管道和炸药参数的匹配设计不合理,如整形段过短,则出现产物和冲击波混合、波阵面非平面的状态,见图5。

图5 不合理设计爆炸激波管流场状态示意图Fig.5 Unreasonable flow field of blasting shock tube
在式(9)、式(10)的基础上,利用高幅频的数字摄影可在进行流场观测的同时,进一步分析冲击波的运动速度和压力等信息。图6 给出了纹影图像数据的处理流程。

图6 冲击波纹影图像处理流程图Fig.6 Processing steps of shock wave schlieren images
实验前,开展视场图像像素尺寸标定。其余图像处理和分析工作通过自编程序实现图像批处理计算,以提高分析计算效率。
3 测量系统设计
高速纹影重点获得激波管出口流场图像信息(形态、运动速度等),压力传感器获得冲击波压力时间历程数据,两者同步测试以揭示流场载荷机制。
3.1 高速纹影系统
考虑到炸药爆炸冲击波或小飞溅物可能对光学器件造成损伤,本文采用反射式光路布置测试系统,如图7 所示。两个主反射球面镜相距约50 m,主反射球面镜焦距为5 m、直径为800 mm。系统采用波长520 nm 的绿色激光作为光源,经过3 mm 狭缝和球面镜产生的平行光通过监测区域后,最终聚焦于刀口并成像于高速数字式CCD相机。CCD 相机的拍摄帧频为3 万幅每秒,幅间间隔为33 μs。

图7 高速纹影测试系统布局光路与初始视场图像Fig.7 Layout of high-speed schlieren testing system and initial field image
3.2 冲击波压力传感器测试系统
为对比纹影测量结果,在纹影成像视场范围内布置压电式接触冲击波压力传感器。其中,传感器的响应上升时间不大于2 μs,测量量程为2 MPa,数据采集系统的采样率为1 Msa/s,AD 分辨率为24 bit。
3.3 激波管系统及同步控制模块
激波管为小型原理性样机。圆形管道的出口内径为87 mm、外径为105 mm。爆炸室离出口端面约4 m,实验由20 V 稳压电源输出,引爆8#雷管和梯恩梯炸药,电源同步输出触发信号给CCD 相机和压力数采系统确保各测试系统延时同步,触发模块示意图见图8。激波管出口和压力传感器在纹影测量系统中的初始视场图像见图7。

图8 时间同步触发模块Fig.8 Time synchronization trigger module
4 实验结果与分析
4.1 压力传感器测试结果
为验证上述实验测试系统的有效性,开展了25 g 梯恩梯炸药爆炸实验。实验测得的压力传感器曲线如图9 所示。由图9 可知,由于激波管内炸药爆炸后出口介质流动的影响,压力传感器测试曲线表现出明显的几个阶段,分别用T1~T3表示,其中各阶段起始时刻用t1,t2,t3表示。从t2时刻开始,压力测试曲线出现明显的压力突变以及压力衰减,表现出典型的冲击波特征。但相比于经典的自由场运动激波压力时间衰减特征,如弗里德兰衰减方程[20],本次实验中压力曲线呈现了多处振荡现象,包含压力突变前零线附近的微弱振荡(图9 中t1)、压力衰减后期的大幅负压振荡(图9 中t3)等,各阶段振荡出现的大致时间如图9 所示。
图9 冲击波压力测试曲线Fig.9 Curve of shock wave pressure
4.2 高速纹影图像测量结果
利用高速纹影对管口的流场形态进行测试,测得压力曲线上的t1,t2,t3时刻对应的流场纹影图像如图10 所示,具体时刻见表1。由表1 可知,高速纹影系统测得的时刻点和压力传感器的测试结果基本吻合,两者的误差主要由采样率不同引起,冲击波压力传感器测量系统的采样率为1 Msa/s,时 间 精 度 为1 μs,而 高 速 相 机 幅 频 为30 000 frame/s,相邻两张图片之间的时间精度为33 μs。

表1 流动介质到达传感器时间Tab.1 Time of flowing medium arrival sensor (ms)

图10 到达传感器时的流场介质纹影图像Fig.10 Schlieren images of flow field medium arrival sensor
由图10 可知,压力突变的t2时刻,纹影图像中有明显的暗色介质波阵面到达压力传感器的敏感元件。根据纹影测量原理以及式(9)、式(10),并结合图9 的压力曲线突变特征,外层的暗色椭球形波阵面即为激波管出口的冲击波。根据冲击波产生原理,冲击波波阵面属于高密度的空气介质,紧跟其后且有一定间隔的喷射状的流动介质属于高温爆炸产物。图11 进一步给出了冲击波和爆炸产物从管口流出、波阵面长大、逐渐分离的演化过程图像。

图11 管口冲击波和产物的演化图像Fig.11 Evolution images of nozzle shock wave and product
结合图10 和图11 中的冲击波、产物及它们与传感器相互作用的演化图像来看,冲击波只有到达压力传感器的敏感元件时才引起突变响应,如图10(b)所示;爆炸产物到达传感器尖端后便出现压力曲线的微弱振荡(见图9 和图10(a)),爆炸产物与传感器作用一定时间后压力曲线出现了大幅振荡(类似于零漂现象)。
本次实验中压力传感器为压电式传感器。国内外已有大量研究[7-10]表明,传统压电式压力传感器在炸药爆炸伴随的高温、高速运动产物及其颗粒等作用下,压电传感器会产生附加寄生响应,可能使冲击波测量数据存在零漂、数据振荡、毛刺等不同程度的干扰。利用高速纹影观测结果也较好地证实了该现象。
需要指出的是,在爆炸发生约0.767 ms 时、冲击波和产物未到达出口前,高速纹影图像中已出现有规则的微弱平面波动条纹,约1.367 ms 时出现了局部弧形波动条纹,如图12 所示。平面波动条纹基本与管道端面平行,局部弧形波动以圆管轮廓上下角点为中心萌生,并随着传播发生相互干涉。
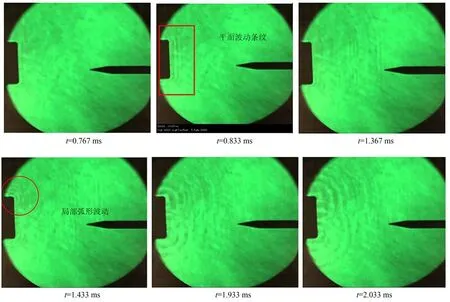
图12 爆炸早期声波波动条纹纹影图像Fig.12 Schlieren images of acoustic wave stripes in early explosion stages
众所周知,激波管内炸药爆炸后,产生的高压气体产物一方面在管道中的空气介质内传播,另一方面将碰撞激波管壁、激起管中应力波,包括轴向的纵波和径向的剪切波,并迅速向出口传播。按照波传播理论[21],纵波传播速度比剪切波速度更快。纵波波速C和剪切波速CT分别估算如下:
式中:ρ,E和v分别为材料的密度、弹性模量和泊松比。爆炸实验用圆管材料为炮钢,取文献[22]中类似材料实测的弹性模量(约262.8 GPa),按此估算,激波管管道中纵波波速和剪切波速分别为5 804 m/s 和3 597 m/s。按爆炸点至管口端面的应力波传播路径估算,纵波和剪切波传播至管口端面的用时分别约为0.705 ms 和1.137 ms,该估算值与高速纹影图像中平面波动和局部弧形波动条纹出现的时刻(分别约为0.767 ms,1.367 ms)基本吻合。经测算,平面波动条纹沿轴线运动的平均速度约为337 m/s,与声速接近。因此,可判断平面波动条纹是由爆炸后,管中纵波传递至管端、引起端面轴向振动响应,进而扰动附近空气形成声波所致;局部弧形波动条纹则应该与剪切波波传播、管口径向振动响应(膨胀/收缩等)响应有关。
图12 中显示的平面波动和弧形波动略微滞后于应力波到达端面响应时刻,其原因应该与爆炸延时(炸药反应在几十μs),端面初期响应较弱,以及存在图像的人工判读误差有关。上述结果表明,该高速纹影系统具有较高灵敏度,不仅能够获得冲击波和产物的运动形态,还能有效捕捉管口瞬态结构引起的空气振动等现象。
4.3 冲击波运动速度测量分析
出口冲击波分离后迅速传播,利用图6 所示的图像处理流程,在视场图像像素尺寸标定的基础上,通过自编程序批处理图像,计算获得视场范围内冲击波沿着激波管轴向方向的运动速度。需要说明的是,由于图像处理时灰度阈值设置会带来冲击波波阵面位置识别误差并最终引入速度和压力的计算结果。本文考虑不同阈值时冲击波的运动速度及其统计误差棒,如图13 所示。结果表明,由于激波管道整形约束,虽然出口距离爆炸点4 m,但出口冲击波运动速度仍高达1 000 m/s。在靠近管口端面较近的区域,通过图像处理获得的运动速度误差相对更大,这与管口冲击波和爆炸产物未完全分离、不同图像阈值时冲击波边缘识别误差较大有关系。
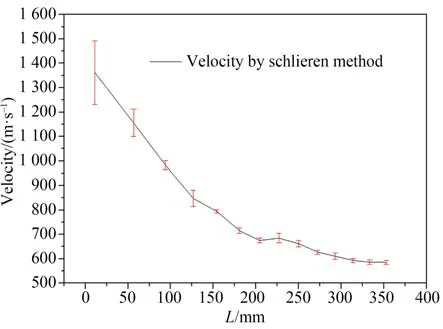
图13 冲击波运动速度随传播距离的变化Fig.13 Variation of shock wave velocity with propagation distance
利用式(10)进一步计算冲击波压力超压峰值,基于纹影图像方法和压力传感器实测超压峰值结果对比如图14 所示。冲击波和爆炸产物流出管道后,由于膨胀作用,冲击波波阵面的运动速度和超压峰值随传播距离迅速衰减且随空间传播逐渐变缓。实验中相机的拍摄间隔为33 μs,因此对速度和压力的空间分布表现出较高分辨率。从图14 中可见,在距离管面350 mm 处,基于图像法获得的冲击波超压峰值与压力传感器的实测数据吻合较好,进一步表明所建立的测试和分析方法的有效性。
当然,本文提出的高速纹影系统可观测的视场还相对较小,所计算的冲击波运动及其压力变化距离还较为有限。未来针对更大口径的爆炸激波管研制,需要进一步提高视场和数据处理能力,如设计阵列式纹影大视场测量系统等。
5 结 论
本文围绕爆炸激波管载荷设计中的冲击波与产物分离、波阵面形态等测量需求,将纹影系统和压力传感器结合,搭建了一套可用于出口流场特征诊断与分析的测试系统。该高速纹影系统能够清晰捕捉爆炸激波管管口冲击波和产物的运动演化图像、管中应力波引起的管口声波振动等过程。纹影测量结果与压力传感器中的数据振荡、压力突变、漂移等现象特征基本吻合。基于纹影图像计算获得的冲击波超压值与压力传感器结果基本一致,并较好地呈现了冲击波运动速度和压力的空间衰减规律。该测量结果对更好理解爆炸激波管冲击波载荷的形成和冲击波毁伤实验的设计具有重要意义。
