飞秒激光电子激发标记测速在超声速混合层流动测量中的应用
2023-11-01殷一民李玉栋
陈 力, 殷一民, 李玉栋, 李 猛, 陈 爽
(1. 中国空气动力研究与发展中心 设备设计与测试技术研究所,四川 绵阳 621000;2. 中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000)
1 引 言
速度是描述流动的主要参数,几乎所有的流动现象都与流场速度密切相关,比如基于速度分布定义的边界层的厚度参数,壁面摩擦速度和黏性系数与速度剖面密切相关,高超声速飞行器表面热流密度与速度近似成3 次方快速增长等[1]。风洞实验是飞行器设计过程中不可缺少的一部分[2]。在风洞实验中,流场速度的测量精度直接影响飞行器模型气动系数测量的准确性,进而影响飞行器气动性能的预测精度[3],因此,速度场的精确测量在空气动力学研究和风洞实验中具有十分重要的意义。
风洞实验中的气体流场速度测量方法包括接触式测量和非接触测量两大类。传统接触式皮托管测速和热线风速仪测速技术[4]相对成熟,但在超声速测量中会产生激波等复杂流动现象,严重干扰流场,带来测量误差。基于粒子示踪的粒 子 图 像 测 速(Particle Imaging Velocimetry,PIV)[5]、激 光 多 普 勒 测 速(Laser Doppler Velocimetry,LDV)[6]、多 普 勒 全 场 测 速(Doppler Global Velocimetry,DGV)[7]等光学测速方法,目前已经实现商业化应用,但由于测量中需要添加纳米或微米量级的固、液示踪粒子,在高超声速、近壁面以及混合层等测量中,粒子的播散尤其是跟随性很难保证。此外,在激波、转捩等影响下,要获得最重要的激波前后、附面层、旋流及转捩区域的速度分布极为困难。与PIV 等不同,分子示 踪 测 速(Molecular Tagging Velocimetry,MTV)采用跟随性很好的分子作为示踪物,能够克服示踪粒子跟随性差的问题,在超声速、燃烧等复杂流动测量中发挥了重要作用。叶景峰[8]、Li[9]等先后对MTV 技术的发展和应用现状进行了较为详细的介绍。总体而言,MTV 能够有效解决一些复杂流动速度测量中的问题,但它通常需要“读”“写”两套系统,系统相对复杂,适用范围有限。随着飞秒激光技术的快速发展,2011 年Michael 等提出了飞秒激光电子激发标记测速(Femtosecond Laser Electronic Excitation Tagging, FLEET)[10]方法,通过荧光标记的N2示踪来获得流场速度,为MTV 提供了新的技术路线,降低了传统MTV 测量系统的复杂性。
近年来,国内外学者针对FLEET 技术开展了大量研究。普林斯顿大学2011 年最早提出FLEET 技术,2013 年利用小型超声速射流评估了技术的准确性,2014年实现了3个方向速度和加速度的测量,2015 年实现了温度和速度的同时测量[11],2017 年在燃烧流场测量中实现了应用,2018年开展了氩气增强飞秒激发研究[12],2019年在AEDC 的9 号 风 洞 中 开 展 了 高 超 声 速 流 场 测 量[13],2021年进一步在该风洞尝试了马赫数为18的速度测量[14]。此外,2016 年,Jiang 等[15]发展了双光子吸收共振(STAR)FLEET 技术,提升了激发效率。2017 年,Burns 等[16]将FLEET 技术应用于0.3 m低温风洞测量。2021 年,Gopal等[17]在电弧风洞上实 现 了1.78 km/s 的 速 度 测 量。Fisher 等[18]2020年利用Burst 模式实现了kHz~MHz 的测量,2021年实现了马赫数为6 的静风洞速度测量[19]。Zhang等[20]在2021 年开展了多线测量研究,2022 年进一步尝试了点线结合两分量的速度测量[21]。
国内开展FLEET 技术研究的机构主要有天津大学、西南科技大学和本课题组所在的中国空气动力研究与发展中心。西南科技大学与本课题组联合开展了FLEET 机理研究[22-23]。天津大学与本课题组合作开展了小型超声速自由射流FLEET 速度测量方法的研究[24],还研究了激光波长和能量对FLEET 的影响,以及基于CN 的荧光信号增强方法,并在实验室环境测量了燃烧流场的速度和混合分数[25]。本课题组与天津大学和西南科技大学研究了FLEET 机理,在初步评估飞秒激发对流场影响的基础上,针对一微型射流剪切装置完成了剪切流动速度的实验测量[3]。
超声速混合层广泛存在于高速飞行器动力、气动及光学系统中,已经成为影响飞行器系统性能提升的关键因素[26]。本文基于飞秒激光器和由高增益像增强器和高速相机构成的荧光探测系统,建立了一套FLEET 测速装置,并成功应用于超声速混合层流动速度的实验测量,获得了马赫数3.0 的射流分别与马赫数2.0,2.5 及2.9 的射流形成的混合流动速度的分布测量结果,验证了该系统在复杂流动速度分布测量中的能力。
2 测量原理及装置
2.1 测量原理
飞秒激光具有很强的峰值功率密度(约为1018W/m2),利用飞秒激光可高效光解和电离风洞实验中普遍存在的N2分子产生N 原子,N 原子通过复合产生激发态分子,激发态分子向低能级跃迁时会辐射荧光信号,荧光寿命可超过百微秒,其详细的物理机制可参考文献[10,24]等。FLEET 技术通过将飞秒激光器输出的脉冲激光聚焦整形成丝后,激发流场中的N2分子产生长寿命电子荧光,形成荧光标记。被标记后的N2分子一边保持其原来的流动状态,一边持续辐射电子荧光,通过拍摄t0和t1两个不同时刻,荧光标记N2分子所在空间的位置S(t0)和S(t1),由时间-位移关系获得流场速度:
2.2 测量装置
FLEET 测量装置主要由飞秒光源、荧光传输及成丝光路、荧光探测系统、时序控制器和数据处理软件组成,如图1 所示。飞秒光源的中心波长为800 nm,脉冲宽度为120 fs,单脉冲能量为6 mJ,出光频率为1 kHz。光路主要由多个透镜组合而成,可灵活调整激光的传输方向,并根据测量距离控制飞秒光丝的长度和直径,实现对N2分子的高效示踪标记。荧光探测系统由高速像增强器和高速相机组合而成,用于精确记录不同时刻标记分子的空间位置,探测系统的最短门宽为3 ns,帧频可达20 kHz。时序控制器用于精确控制飞秒激光器的出光时刻,以及荧光探测系统与飞秒激光的时序关系、曝光门宽,控制精度可达0.25 ns。数据处理软件通过对采集的荧光标记线图像进行去噪、增强和拟合等手段,识别出光丝的空间坐标位置,并解算出流场的速度,光丝位置的识别精度可达亚像素级。

图1 FLEET 测量装置示意图Fig.1 Schematic diagram of FLEET system
3 超声速混合层流动装置
本文搭建了一座小型超声速混合层流动装置,该装置主要由进气段、扩散段、稳定段、喷管、实验段和超扩段组成,总体结构如图2 所示。装置主体分为上下两部分,上下喷管型面不同,通过由两个独立供气通道组成的进气段,提供高总压的空气,产生不同马赫数的气流,进入实验段后形成混合流动。实验段尺寸为20 mm(宽)×30 mm(高)×300 mm(长),混合层流动装置的总长度为1 380 mm(从扩散段入口到超扩段出口,不含进气段)。装置由高压储气罐供气,气源压力为2.0×106Pa,气源容积为1 m3。共配有3 套组合喷管,其中上喷管设计马赫数固定为3.0,下喷管设计马赫数分别为2.0,2.5 和2.9,以形成不同的超声速混合层流动。实际运行的流场校测参数如表1所示。

表1 超声速混合层流动工况及流场校测结果Tab.1 Operation conditions of supersonic mixing layer facility and measurement result of flow field
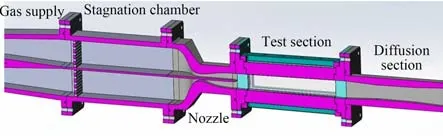
图2 超声速混合层装置结构Fig.2 Schematic of supersonic mixing layer facility
4 实验与结果
4.1 速度测量实验与结果
针对表1 所示的3 种工况,利用FLEET 技术在超声速混合层装置上开展了速度测量实验,测量位置距离喷管出口65 mm。实验中,荧光探测系统的曝光时间为0.4 μs,时序控制精度优于0.25 ns。针对每一种工况,以飞秒激光器出光时刻为计时零点,分别采集了延迟0 μs(荧光基线)、延迟5 μs 和延迟10 μs 3 个不同时刻的示踪分子荧光图像,其中延迟5 μs 和延迟10 μs 的荧光图像由两车实验获得。为了便于比较,图3 给出了工况1 获得的3 个不同时刻的荧光图像合成图,从左至右3 条荧光图像对应的拍摄时刻分别为0,5,10 μs。可以发现,随着延迟时间由5 μs 增加到10 μs,由于气流的运动,电子荧光图像在气流流动方向上(图3 中气流方向为从左至右流动)距离基线的位置明显增加;对于同一延迟时间下的每一条电子荧光曲线,由于来流马赫数不同,荧光图像被分成三部分,上半部分对应马赫数3.0 射流形成的电子荧光图像,它在相同的时间延迟下移动的位移最大,在图像上表现为离基线最远;下半部分对应马赫数2.0 射流形成的电子荧光图像,由于速度相对较慢,它在荧光图像上与基线位置的距离短于马赫数3.0 的荧光图像;电子荧光图像的中间部分,由于上下主流来流马赫数的不同,形成了明显的混合层流动,不同空间位置因流动速度的差异,电子荧光曲线出现明显的弯曲。
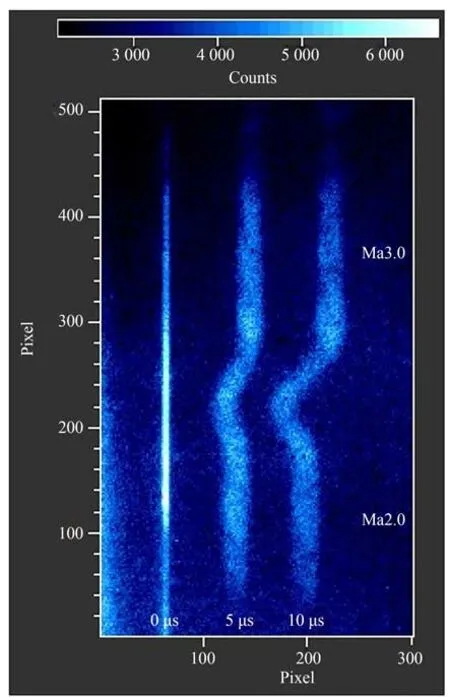
图3 工况1 不同时刻示踪分子荧光图像Fig.3 Fluorescent filaments of FLEET for Case 1
从图3 中可以看到,每一条荧光线在荧光图像上的分布宽度约为几十个像素,经过分析,其强度总体呈高斯线型分布。为了提高标记分子空间位置的识别精度,本文采用高斯拟合确定各标记分子在不同时刻所处的图像坐标位置,拟合精度可达亚像素级。图4 给出了图3 中荧光基线在竖直方向200 像素所处位置的强度分布及高斯拟合效果。遍历不同时刻每一条荧光图像的不同位置,即可获得所有荧光标记分子不同时刻所处的图像坐标位置,如图5 中的实线所示。

图4 荧光信号的高斯拟合曲线Fig.4 Gaussian fitting plot of fluorescence signal

图5 荧光标记分子图像坐标的拟合结果Fig.5 Fitting results for image coordinates of fluorescence tagging molecules
通过预先标定好的图像坐标与流场真实空间坐标的映射关系,即可由式(1)计算获得混合流动速度的分布测量结果。图6 给出了分别利用延迟5 μs 与基线,以及延迟10 μs 与基线计算获得的马赫数3.0 与2.0 形成的混合流动速度的测量结果。经过进一步分析,在马赫数3.0 主流区域,两种延迟时间测得的平均速度分别为621.3 m/s 和612.5 m/s;在 马 赫 数2.0 主 流 区域,两种延迟时间测得的平均速度分别为518.8 m/s 和519.9 m/s。而 根 据 表1 所 示 的 流场校测结果,马赫数3.0 与马赫数2.0 的主流区域的理论计算速度分别为619 m/s 和512 m/s,测量结果与理论计算结果基本一致。
利用FLEET 技术,进一步开展工况2 和工况3 下混合流动的速度分布测量实验。图7 给出了利用延迟时间10 μs 的荧光图像与基线计算的3种工况下的速度分布结果,可以发现,在高速(马赫数3.0)主流区域,3 种工况的速度基本相当;而在低速主流区域,随着马赫数由2.0 逐渐增加到2.5 和2.9,FLEET 测得的平均速度由519.9 m/s分别增加到567.5 m/s 和612.7 m/s。
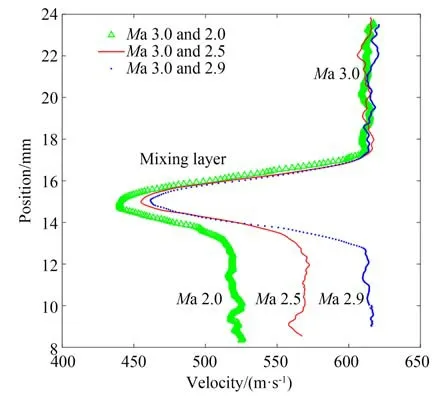
图7 三种工况混合流动速度的测量结果Fig.7 Velocity measurement results for 3 different cases
在 速 度 测 量 不 确 定 度 方 面,参 考Gopal[17]及Grib[27]等的分析方法,根据式(1)所示的测量原理,FLEET 系统的速度测量不确定度为:
由此可见,速度测量不确定度主要由时间不确定度及位移不确定度共同决定。时间不确定度主要由同步时序控制器的控制精度确定,系统中优于0.25 ns。在不考虑横向位移的情况下,位移不确定度通过在无流动的情况下,采集100 幅飞秒脉冲激光激发的电子荧光图像,通过高斯拟合分别获得荧光线所处的空间位置确定。利用式(2)得到在延迟10 μs 的条件下,FLEET 装置的速度测量不确定度优于5 m/s。
4.2 混合层流场结构
这里分别采用大涡模拟和常规透射式纹影实验,获得了超声速混合流动的流场结构。纹影实验中,相机拍摄帧频为7 000 frame/s,每帧图像的曝光时间为2.5 μs,视场为距离喷管出口32~110 mm。图8 给出了马赫数3.0 与2.0 形成的混合流场大涡模拟及纹影获得的流场结构。从图中可以清晰地观察到流场中心区域明显的混合层流动,利用图像坐标与空间坐标的映射关系,对纹影结果中间密度变化较大的区域进行分析,得出混合层厚度从前至后约4.2~5.8 mm,在距离喷管出口65 mm 处的厚度约为4.5 mm。根据FLEET 速度分布的测量结果,如图6 所示,将速度开始持续快速下降处设定为混合层起始边界,得到的混合层厚度为4.3 mm,与纹影实验结果基本相符。

图8 流场结构大涡模拟(上)及纹影(下)的结果Fig.8 Flow structure results by large eddy simulation(above) and schlieren experiment (below)
5 结 论
本文基于飞秒激光器和由高增益像增强器和高速相机组成的荧光探测系统,建立了一套FLEET 测速装置,并成功应用于超声速混合流动速度测量实验,获得了马赫数3.0 射流分别与马赫数2.0,2.5 及2.9 射流形成的混合流动速度分布测量结果。结果表明,利用延迟10 μs 的荧光标记线与荧光基线的位移差,实验中FLEET获得的速度测量不确定度优于5 m/s;在高低速主流区,FLEET 测量的速度结果与计算结果基本一致;在混合层,FLEET 实现了较大梯度的速度分布测量,混合层的厚度与纹影实验结果基本一致。该FLEET 装置具有较强的工程实验能力,能够用于超声速混合流动等复杂流动速度的分布测量。
