基于改进Yolov5 算法的地铁车辆轴箱盖螺栓定位方法研究
2023-10-31朱久牛李立明柴晓冬郑树彬彭乐乐
朱久牛, 李立明,2, 柴晓冬,2, 郑树彬,2, 彭乐乐,2, 吕 晟
(1 上海工程技术大学 城市轨道交通学院,上海 201620;2 上海工程技术大学上海市轨道交通振动与噪声控制技术工程研究中心,上海 201620; 3 上海地铁维护保障有限公司, 上海 200031)
0 引 言
中国城市快速建设,城市轨道交通飞速发展,其数量每一年都在急速增加,也带来了诸多挑战[1]。截至2021 年末,上海城轨交通数量超7 000 辆,其中9 号线车辆数量达到600 多辆,约占上海城轨交通数量的8.57%。 维修车辆是轨道交通基础设施维护的重要措施,从而使列车检测尤其重要[2]。 比如地铁车辆轴箱螺栓的检修和维护,地铁车辆轮与侧架连接在一起的装置是轴箱,承受车辆重量、传递各方作用力的作用[3]。 螺栓用来链接轴箱体和轴箱前盖,螺栓预紧力过大将导致轴箱体螺纹孔损坏和轴箱前盖发生塑性变形甚至断裂,螺栓预紧力过小则导致车辆运行过程中轴承窜动而损坏[4]。 在传统轴盖螺栓检测有两种方法:停车列检和定期段检。中国拥有庞大的地铁车辆,在车辆的检修与维护过程中,带来了人员配置的巨大压力和高成本。 在对螺栓检测的方法中,李静等[5]对转向架心盘螺栓图像进行了区域分割和特征提取,然后用分类器训练,定位螺栓,以此来判别螺栓故障状态;陈燕等[6]利用数字图像的检测技术和Hough 变化检测螺栓缺失时边缘特征,从而判别螺栓缺失故障。 以上研究是利用传统方法识别螺栓的缺失故障,精度较低,误检率较高。 近年来,卷积神经网络在计算机视觉领域的图像处理方法中流行,王振等[7]以Yolov3 网络为基础,检测出图像序列中的螺栓组件目标位置;陈健雄等[8]利用Yolov2 网络寻找连接板的位置信息,实现螺钉头部与连接板边缘的分割,从而判别螺钉状态。 以上研究模型检测的精度得到提升,但网络模型复杂,不够轻量化。 因此,本文在不损失精度情况下,针对网络模型的轻量化,提出一种基于改进Yolov5s 算法的车辆轴箱盖螺栓定位模型,如图1 所示。

图1 基于改进Yolov5s 算法的车辆轴箱盖螺栓定位模型Fig.1 Vehicle axle box cover bolt localization model based on improved Yolov5s algorithm
1 网络模型
Yolov5s 网络利用CSPNet(Cross Stage Partial Network)结构构建两种不同的结构,实现特征提取和特征融合,导致网络深度较复杂,模型体积较大。 本文采用GhostNet 残差结构和挤压激励(Squeeze Excitation,SE)模块构建GGS(Ghost-Ghost-SE) 模型应用在原Yolov5s 主干网络中的8 倍、16 倍下采样和特征提取,并在32 倍下采样和空间池化操作(Spatial Pyramid Pooling,SPP)后增加一个SE 模块。 在PANet(Path Aggregation Network)结构中使用步长为1 的Ghost 瓶颈结构、1×1 和3×3 的深度可分离卷积构建一个自下而上的路径多尺度融合框架;在32 倍降采样特征进行特征融合、降维、上采样操作,然后与16 倍降采样特征进行特征拼接,得到的拼接特征进行降采样,再按照相同的操作与8 倍下采样特征进行特征拼接、降维;降维时产生的特征分别是p1、p2、p3,尺寸分别是13×13、26×26、52×52;p3 经过特征融合得到P3,P3 降采样得到的特征与p2 拼接,得到的尺寸进行特征融合得到P2,P2降采样得到的尺寸与p1 拼接,得到的尺寸进行特征融合得到P1,P1、P2 和P3 卷积生成大小尺寸为13×13×30、26×26×30、52×52×30,网络结构如图2 所示。
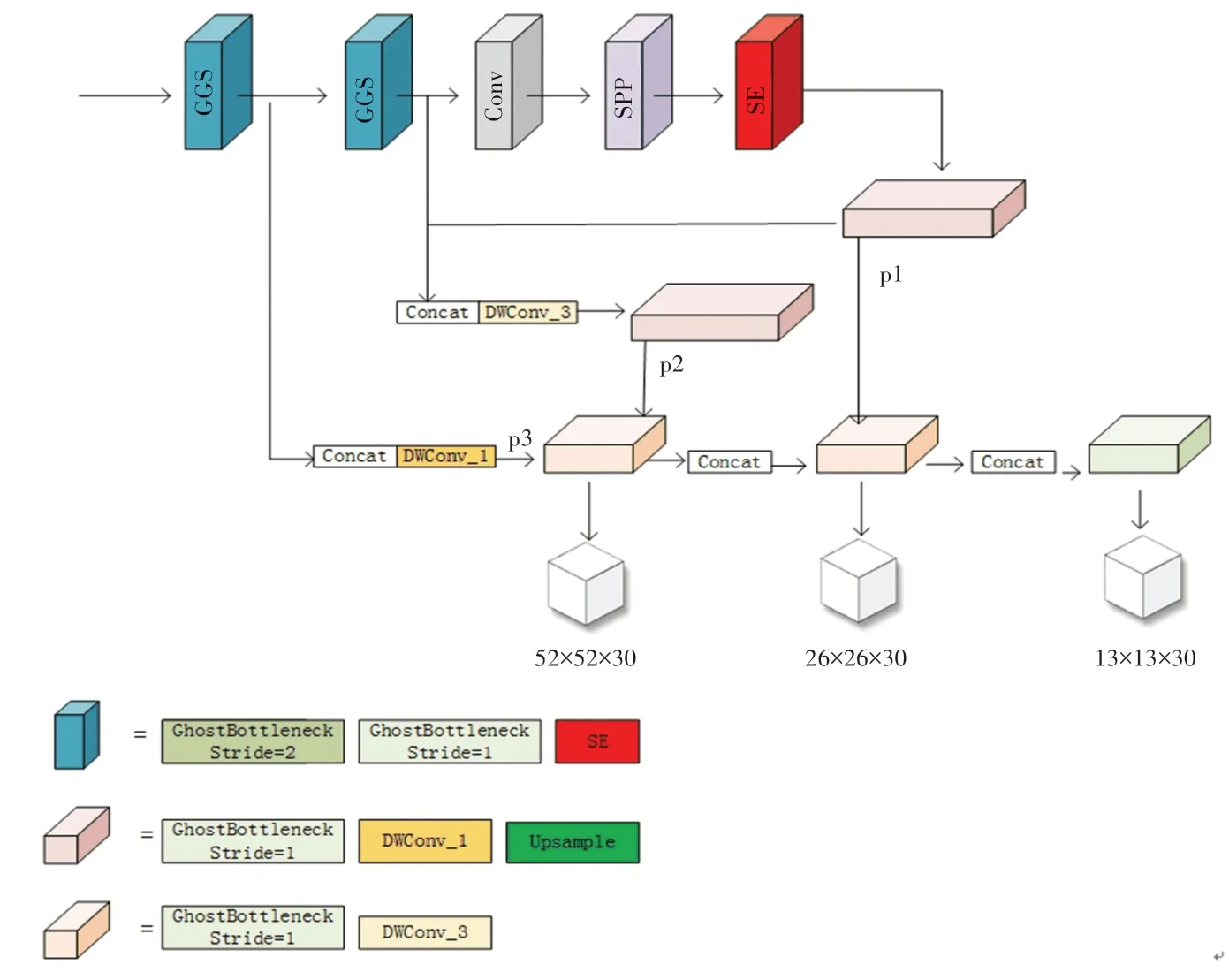
图2 改进Yolov5 网络结构Fig.2 Improved Yolov5 network structure
1.1 GGS 模型
Ghost 残差结构是将特征经过一次普通卷积生成部分特征,生成的部分特征再进行廉价的线性变化,生成另一部分特征,两部分特征叠加得到新的特征[9]。 为了充分利用特征通道中包含的重要信息,引入了SE 模块。 先用2 个Ghost 模块、步长为2 的深度可分离卷积和短接组成一个步长为2 的Ghost瓶颈,再用2 个Ghost 模型和短接组合一个步长是1的Ghost 瓶颈,最后与SE 模块连接。 Ghost 模型和GGS 模型结构,如图3 所示。

图3 Ghost 模型和GGS 模型结构图Fig.3 Structure diagram of Ghost model and GGS model
在GGS 模型中,输入特征先进行步长为2 的Ghost 瓶颈降采样,再进行步长为1 的Ghost 瓶颈特征提取;经过全局池化得到挤压特征,使之具有全局感受野、降维,经过全连接(Fully Connection, FC)、全连接、通过Sigmoid 激活函数将权重归一化;最后进行比例操作对特征进行权值评估,以便更加集中重要的特征表达。
利用构建轻量高效的GGS 模型替换原Yolov5s网络的主干网络的部分卷积和CSPNet 结构,使其能够更好地表达特征和聚合感受野的特征,改进后网络的主干网络结构如图4 所示([3,2]表示卷积核尺寸大小为3,步长为2),虚框为GGS 模型结构。
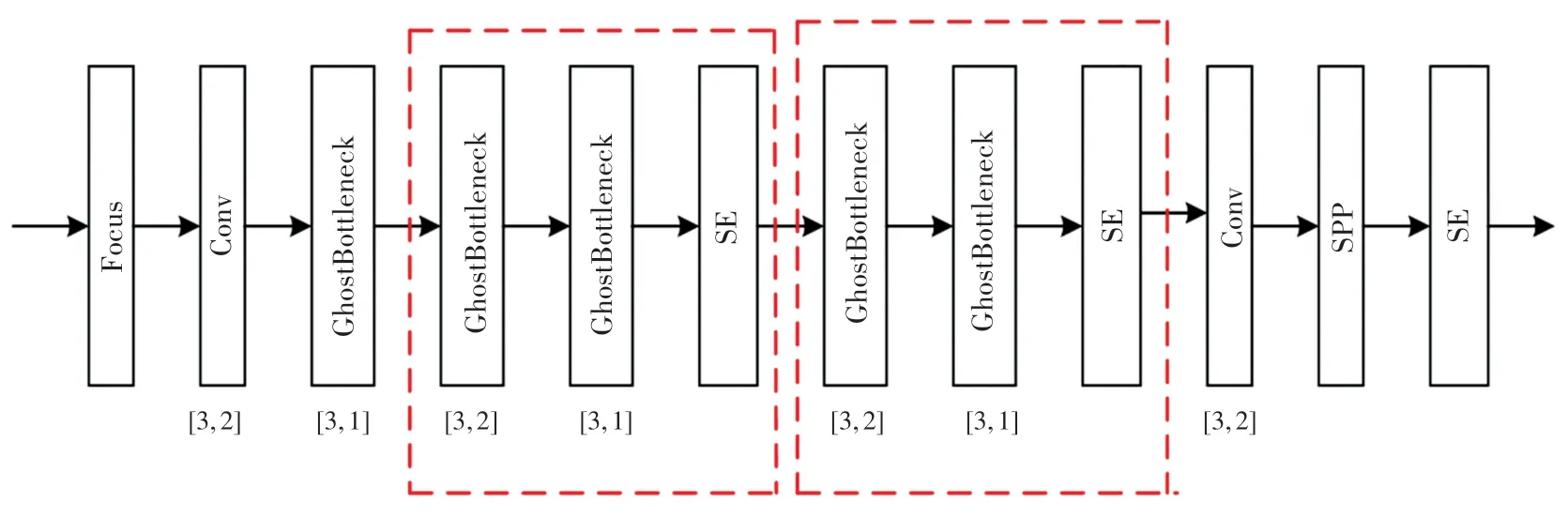
图4 改进网络的主干网络结构Fig.4 Backbone network structure of the improved network
本文网络和原网络的主干网络结构的参数对比见表1,使用GGS 模型结构作为改进网络的主干网络,实现了参数量大幅度的降低。
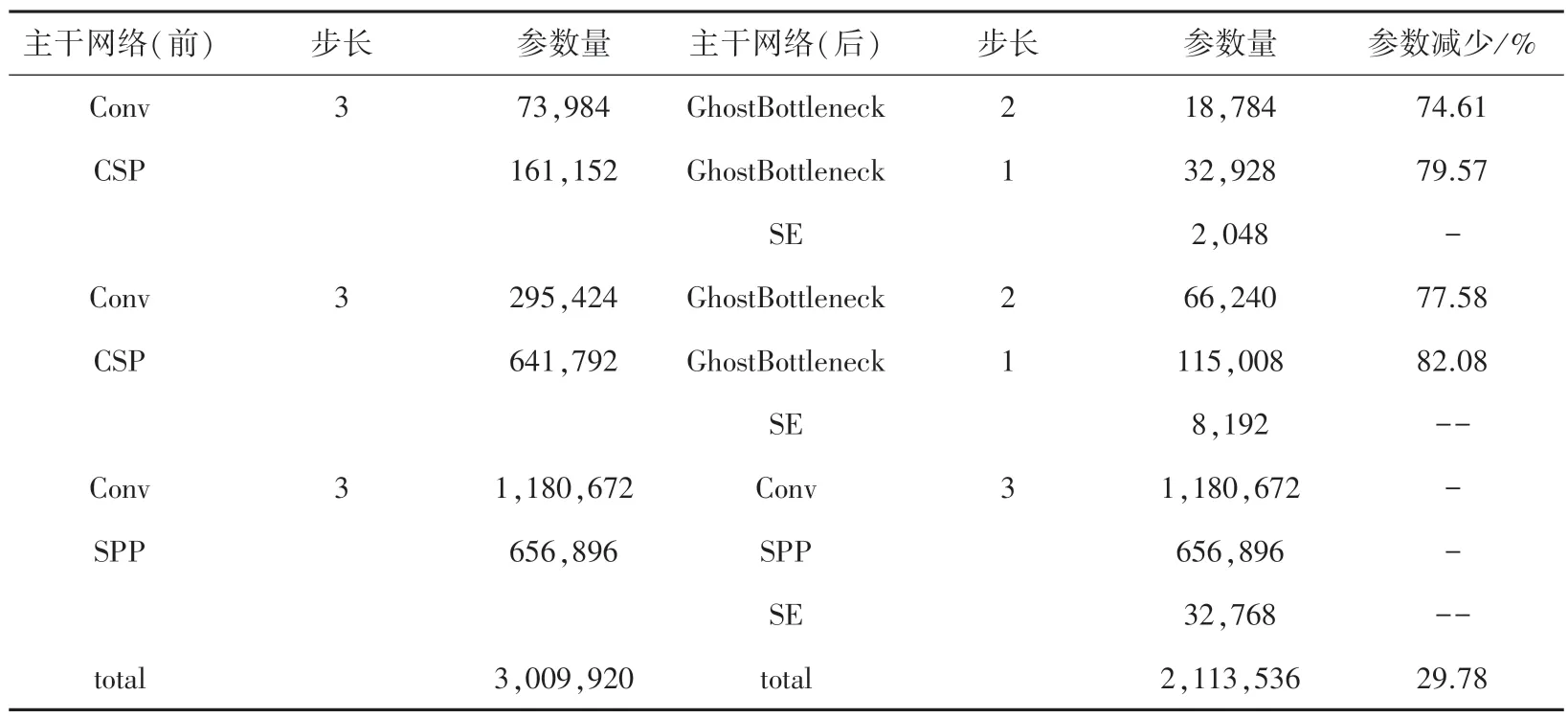
表1 改进前后主干网络模型参数对比Tab.1 Comparison of backbone parameters before and after improvement
1.2 深度可分离卷积
原Yolov5s 网络在PANet 结构中使用普通卷积进行降维和降采样,导致其结构模型参数较多、计算量较大。 为了不降低网络检测精度,本文引用深度可分离卷积替代普通卷积,降低网络参数量和计算量,将输入特征先进行深度卷积(Depthwise Convolution, DW),得到的特征在进行逐点卷积,输出最终结果。 深度可分离卷积结构如图5 所示。

图5 深度可分离卷积结构Fig.5 Depthwise separable convolution structure
深度可分离卷积的计算量,式(2):
其中,C表示输入特征的尺寸;k表示卷积核的尺寸;N表示输入特征的通道数量。
深度可分离卷积和普通卷积计算量之比,式(3):
一般情况下,N值很大,k值设置为3,所以深度可分离卷积和普通卷积计算量之比约为1/9。
在改进网络的PANet 中,用步长是1 的Ghost瓶颈结构、1×1 和3×3 的深度可分离卷积进行特征融合、通道维度变换、降采样。 前后PANet 网络结构参数量对比见表2。 可见改进的PANet 模型结构每一行的参数量相对原算法的PANet 结构都有实质性的大幅度的降低,改进的模型参数量的总和是原算法参数总和的1/9 左右。

表2 改进前后PANet 结构模型参数对比Tab.2 Comparison of model parameters in PANet before and after improvement
2 实验结果与分析
2.1 数据集的建立
本文试验使用的数据集是利用360°动态图像检测系统采集上海9 号线地铁车辆轴箱盖图像,一共采集370 张具有轴箱盖的图像。 按照比例8:1:1的方式,训练集有296 张,验证集有37 张,测试集有37 张。 由于螺栓样本数据较少,因此在训练时采用Mosaic 数据增强方式,丰富数据集的同时极大的提升网络的训练的速度,提高最终的检测效果,降低模型的内存需求,有效抑制模型过拟合程度。
2.2 评价指标
本文模型性能评估指标为精度(P),平均精度(Average Precision,AP), 平 均 精 度 均 值(mean Average Precision,mAP)。 精度的计算,式(4):
其中,TP表示真阳率,FP表示假阳率。
平均精度为不同召唤率下精确率的平均值。 平均精度均值是不同类别平均精度的平均值,用来评价某一类的检测精度,评价网络模型的整体性能,式(5):
怒吼的河水溅出白色的浪花,肆意击打着金属栏杆,栏杆又窄又滑。克里斯蒂娜就算有胆在上面悬挂五分钟,也不一定能撑得住。可怜的克里斯蒂娜进退两难,她要么选择沦为无派别人,要么去冒死一试。
其中,n为检测目标类别数,AP(i) 为某一类的检测精度。
本文使用mAP@0.5,即设置IoU阈值为0.5 得到的mAP。
2.3 实验结果
分别使用Yolov5s 算法、Yolov5-ghost 算法和Yolov5-GGS-DW(本文)算法定位螺栓,各算法的模型参数和模型尺寸如图6 所示,可见算法模型参数量和模型尺寸越来越小,以及本文网络模型参数量是Yolov5s 网络模型参数量的1/3 左右,模型尺寸比Yolov5s 网络模型尺寸的一半还要小。 3 种算法的损失函数曲线如图7 所示,训练网络时设置IoU的阈值为0.5,每一种算法训练500 次。 由图7 可见,在训练次数到达200 次,算法的损失函数值的收敛值趋于0。
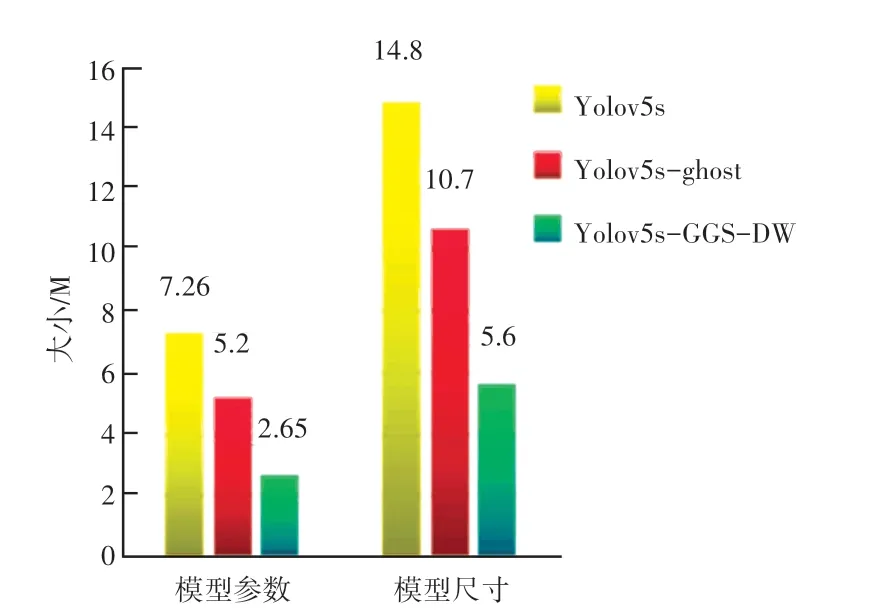
图6 3 种算法模型参数和模型尺寸的对比Fig.6 Comparison of model parameters and model size of three algorithms
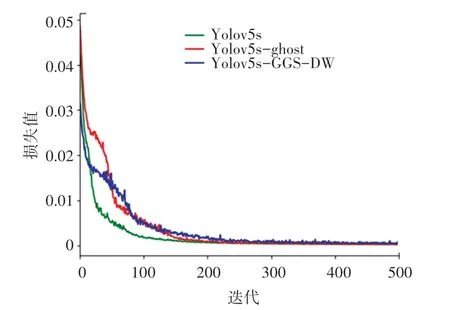
图7 3 种算法的损失函数曲线Fig.7 Loss curves of three algorithms
使用不同算法各种类螺栓的平均精度见表3,本文算法中的螺栓种类Bolt_A 的平均精度比其他两种算法高,Bolt_B 的平均精度与Yolov5s 算法一致,螺栓种类Bolt_C 和Bolt_D 的平均精度相对较低,本文算法的平均精确度值为98.6%,相对于另外两种算法的平均精度均值基本没有什么损失。
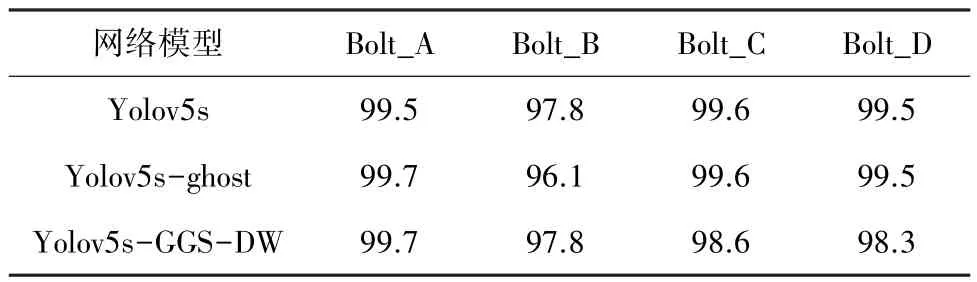
表3 Yolov5s 算法、Yolov5s-ghost 算法和Yolov5s-GGS-DW 算法各种类检测平均精度对比Tab.3 Comparison of the average accuracy of Yolov5s, Yolov5sghost and Yolov5s-GGS-DW
使用本文算法对城市轨道交通车辆的轴箱盖螺栓定位检测,如图8 所示,每一种类别的螺栓的定位框的置信度大部分在80%以上,可以用来判断螺栓是否存在。
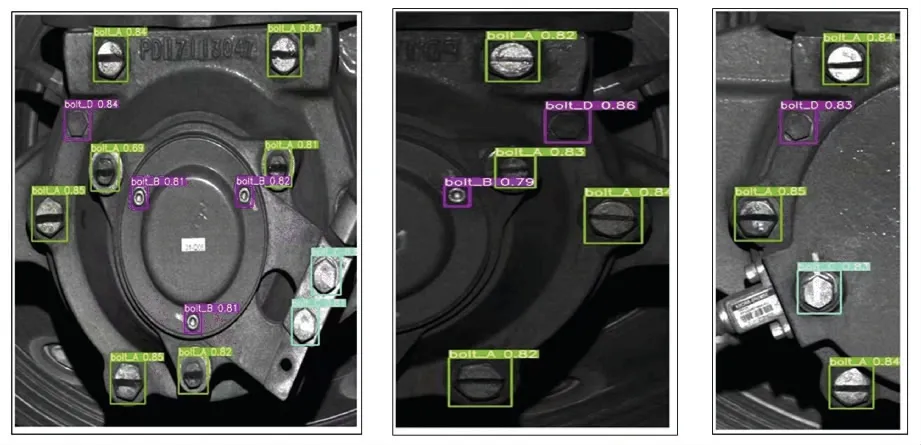
图8 螺栓定位Fig.8 Bolt location
本文运用了精度(P)、 浮点运算(giga floating point operations persecond,gflops)、mAP50 的数值进行模型性能指标对比,见表4。
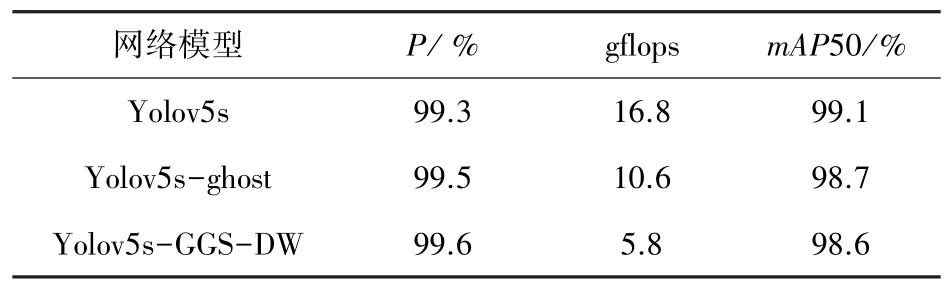
表4 3 种算法的性能指标对比Tab.4 Comparison of the performance metrics of the three algorithms
从表4 可知,本文算法的精度高达99.6%,相比Yolov5s 网络提升了0.3%,而且mAP50 也高达98.6%,相比较原Yolov5s 网络下降了0.5%。 从浮点运算可以看出,在无损精度的状态下,本文的网络计算量是原网络计算量的1/3,实现了压缩模型的体积,使网络模型更加轻量化。
3 结束语
本文将GhostNet 残差结构和SE 模块的性质组合GGS 模型代替Yolov5 的主干网络中的特征提取层,在PANet 结构中使用深度可分离卷积和步长是1 的Ghost 瓶颈结构进行特征降采样,减小模型尺寸,改进Yolov5s 轻量级网络检测效果与Yolov5s 检测精度,模型尺寸却只有原Yolov5s 的37.8%。
