室内外定位技术综述
2023-10-31苏素燕陈金旺王林芳林明睿
苏素燕, 陈金旺, 王林芳, 陈 芳, 陈 俊, 林明睿
(1 国网福建省电力有限公司 厦门供电公司, 福建 厦门 362400; 2 福州大学 物理与信息工程学院, 福州 350108)
0 引 言
随着技术水平的不断提升,社会各行各业的兴起和发展,位置服务受到了越来越多人的关注和重视,定位服务也因此变得越来越商业化、普遍化。 定位系统开始投入到各行各业,如:地图导航、森林消防、房屋建筑、交通安防等[1]都离不开定位系统,可以说定位服务极大程度的改变了人们的生活水平,推进了社会的发展与进步。
由于行业的兴起和技术的发展,以及生活环境的不断复杂化,对定位精度的要求也越来越高。 美国的GPS 定位系统和中国北斗导航定位系统,撑起了整个的室外定位。 然而,其在复杂多变的室内环境下并不适用,因此越来越多满足室内定位需求的定位技术被研发实施。 如:蓝牙、WIFI、超声波等定位技术[2],通过结合不同的算法,甚至与不同技术的融合,使室内定位精度达到一个新的高度。
1 室外定位技术
1.1 GPS 定位技术
GPS 定位是目前最为精确,应用最为广泛的定位技术,GPS 系统由空间端、控制端、用户终端组成。其定位原理是通过用户端发出的定位请求,空间端就会发送定位的卫星信号,接收器随之接收相关定位信息,再由用户端接收由地面控制中心计算出来的位置结果。
GPS 定位方法包括绝对定位(单点定位)和相对定位(差分定位)等。 该系统广泛应用于房屋建筑、车辆定位、农业养殖等领域[3],但由于定位过程的轨道误差、时钟误差以及各种延迟和噪声的干扰,定位精度只能达到米级。
1.2 北斗定位技术
北斗定位系统由空间端、地面控制端、用户端组成,是主动式双向测距二维导航。 地面控制中心解算供用户定位的三维数据。 北斗定位原理与GPS 大致相同,多采用“三球交汇”的原理来实现。 即地面接收设备需同时测量至少三颗卫星与用户的距离。 用户端分别以每颗卫星为球心,其与该卫星间的距离为半径,画出相交于两点的3 个球面,根据地理常识选取相对位置较低的交点,即为用户的实际坐标位置点[4]。
迄今为止,北斗导航系统已经发展到“北斗三号”,北斗三号实现了全球范围的无源定位,在抗干扰能力方面要强于GPS 定位系统。 北斗定位精度为米级,被广泛应用于通信、水利、交通、森林防火等,且北斗是唯一可以进行通信聊天的定位系统,北斗地面增强站系统已实现广域覆盖,可为全球用户提供高精度定位数据支持,具有无限的发展潜力。目前,国家正在推进北斗与5G 技术的融合定位[5]。
2 室内定位技术
2.1 WIFI 定位技术
目前WIFI 是相对成熟且应用较多的技术,近年来有不少公司投入到了这个领域。 WIFI 室内定位技术需要通过定位标签,在布满无线局域网的区域按照一定的周期发出相关信号,最后由定位服务器接收该信号。 根据接收信号的强弱以及信号到达时差,来推算出人员所在的位置,并让具体位置在电子地图显示[6]。
因成本低、覆盖范围广、传输速度高等原因WIFI 成为室内定位的主流。 WIFI 室内定位算法大致分为两大类:一是不基于RSSI 的算法,其中包括到达时间(Time Of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)以及到达角度(Angle of Arrival,AOA)算法;另一种是基于RSSI 的三角定位算法和指纹算法。 就目前来说,WIFI 技术定位应用最可行的算法是基于RSSI 的指纹定位算法[7]。 利用该算法进行室内定位,在正常情况下能满足室内需求,但环境复杂多变,很容易影响WIFI 信号,使其定位精度降低,定位漂移现象尤其严重,且标签功耗大、略昂贵,再加上指纹定位的数据采集阶段工程量繁琐,且很容易受基站变换的影响。
2.2 RFID 定位技术
RFID 定位技术适用于区域位置定位,即通过2.4 G和低频125 K 的RFID 技术,实现对人和物的识别以及定位管理。 RFID 定位主要是读取所测RFID 标签的相关特征信息,该过程通过一组固定的阅读器实现,再通过相关方法(如接收信号强度等),把标签所在的具体位置计算出来。
基于RFID 的定位方法有室内静态目标定位算法和室内动态目标定位算法。 室内静态目标定位算法包括测距定位算法以及非测距定位算法。 如:距离矢量跳数节点定位算法、质心定位算法和k 邻近定位算法等。 动态目标定位算法包括:时间域相位差测距算法、频率域相位差测距算法和空间域相位差测距算法[8]等等。
RFID 定位技术信号传输范围较广、应用成本低,具有非接触以及非视距等优点,适用于室内定位。 但由于该技术作用的距离有限,缺乏通信能力,与其他系统融合在一起的效果并不好,因此定位不够精准。
2.3 超声波定位技术
超声波定位原理是基于超声波测距技术,大多采用反射式测距法[9]。 定位过程如下:首先通过固定在被测物体上的声波发生器,周期性的发送同频率的信号给各个位置已知的电子标签,通过不同时间所接收到的同一信号,具体推算出其各自之间的相关距离,从而推算出被侧目标的定位坐标。
常见超声波测距采用传播时间检测法进行,超声波的传输路程等于超声波传播时间与超声波在空气中的传播速度的乘积。 利用定位算法并结合多组超声波测量的距离数据,即可计算出被定位物体的具体位置坐标。 超声波定位主要应用TOA 定位算法和TDOA 定位算法实现。 该方法成本低、功耗小、定位精度可观,但对于复杂的环境定位效果仍不佳。
2.4 蓝牙定位技术
蓝牙定位技术的实现,需要在室内环境下建立3 个及以上的beacon 基站[10],然后通过带有蓝牙功能的移动设备来接受从基站发出的广播报文,以此来推算出功率,计算出移动设备与基站间的距离,从而确定移动设备的位置。
蓝牙定位系统主要采用测距交汇法(又称传播模型法)和指纹匹配法两种定位方式。 测距交汇法基本原理为:先构建室内环境下的蓝牙信号衰减模型,使用衰减模型将信号强度信息转换为两者之间的距离信息,再采用定位算法计算出目标位置。 该方案的优势是无需构建指纹数据库,理论定位精度高;指纹匹配定位方法是将位置信息和蓝牙信号强度特征形成特殊的映射关联,即对室内场景下的位置坐标信息形成与之唯一对应的信号强度特征指纹[11]。
蓝牙定位技术是一种短距离(一般在2-5 米左右)适用于室内的无线传输技术,具有较高的商业价值,且功率消耗低,定位精度相对较高。 其缺点是受环境影响较大,稳定性较差,而且系统作用的范围比较小。
2.5 惯性导航定位技术
惯性导航技术是一种纯依靠客户端的技术,通过终端惯性传感器采集物体运动过程的相关数据信息(其中包括物体的速度、方向、加速度等),再利用各种定位运算方法推算出被测物体的大概位置。 惯性导航系统是一个自主式的导航系统,由惯性测量单元和积分器组成的积分系统。 惯性导航技术在没有通讯设备和网络的情况下,就可以输出用户的具体位置信息,并且这一过程是实时进行的,也就是说在各种复杂多变的环境中,仍然可以做到对人员位置的精确定位。 在惯性导航定位的基础上,还有一些技术可以辅助,从而达到更好的定位效果,如与WIFI 指纹技术的结合[12]。
该技术不会被电磁信号所干扰,安全隐蔽性强,而且产生的导航信息噪声低,定位过程中的数据更新率高,能在短时间内有比较好的精度和稳定性;但是随着时间的变化,误差也会随之增大,再加上传感器价格昂贵等原因,该技术也无法满足人们对室内定位的需求。
2.6 超宽带(UWB)定位技术
超宽带技术是一种无线通讯技术[13],其不使用传统通信体制中的载波(不采用正弦载波),而是通过对极窄脉冲的发送和接收来进行数据传输。 该脉冲为非正弦,且脉冲宽度须在纳秒甚至微秒级以下,具有3.1~10.6 GHz 量级的频谱带宽。 该技术具有良好的室内定位发展应用前景,隐含着很高的商业价值。
随着硬件设施以及对应操作水平的不断提高,提高UWB 定位精度以及达到普遍化应用的重点,是将该系统与其他定位技术相融合;再加上深度学习的发展,将给该技术带来更大的突破和影响。 该技术主要用于室内定位,具有数据传输性能好、低功耗、安全保密性强、高处理增益、很强的抗干扰能力和定位精度高等特点[14]。 超宽带技术通过与不同技术的融合,以及采用不同算法的应用,定位精度保持在0.1~0.5 m 的范围。
3 定位算法
3.1 AOA 定位算法
如图1 所示,AOA 到达角度定位方法,主要是通过建立两个基站,分别以基站坐标为起始位置,形成两条经过移动台的射线,而两射线相交的点就是移动台所在的大概位置[15]。
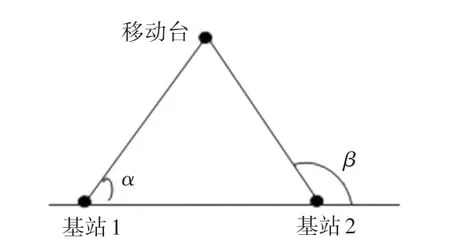
图1 AOA 定位示意图Fig.1 AOA positioning schematic diagram
当基站内设有天线阵列时,移动台作为信号的发送端发出信号,并且由两个基站进行接收,进而可以得到两个基站的入射角,即图中所示的α、β,再以各基站坐标作为出发点,沿着入射角所对应方向形成的交点,就是移动台所在的位置。 假设移动台位置坐标为(x,y),N个基站的位置坐标为(xi,yi)。根据其几何意义,坐标之间存在以下关系:
将式(1)展开可得
将式(2)化简可得
最后可以利用最小二乘法解得X。 该算法通信成本低,定位精度较高,常应用室内定位过程中。
3.2 TOA 定位算法
TOA 到达时间定位方法,是通过记录移动台(信号发送端)发出信号到基站接收到信号所消耗的时间,再利用相关公式转换为两者间的距离,从而进行位置定位。 该方法的实现至少需要3 个基站的参与,才能计算目标的位置,其定位示意如图2 所示。
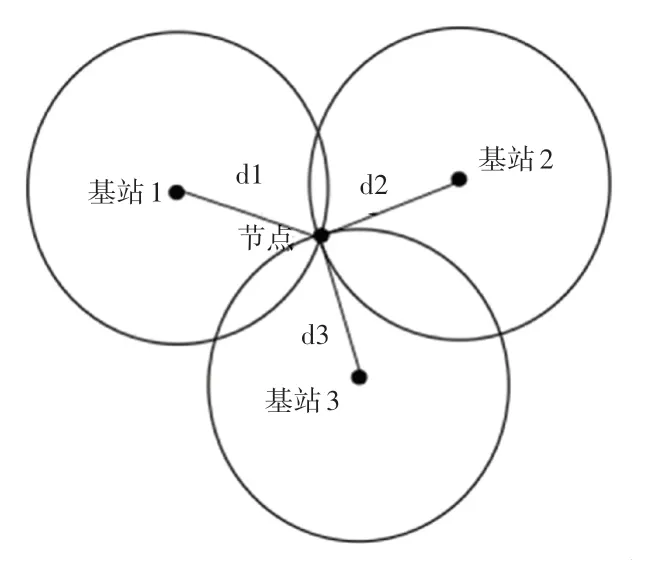
图2 TOA 定位示意图Fig.2 TOA positioning schematic diagram
三个基站与信号接收节点的距离分别为d1、d2、d3,以基站所在位置为圆心,所测得的距离为半径画3 个圆,相交于一点,即目标节点所在位置。 在计算过程中一般利用最小二乘法计算待测节点的大概位置[15]。 假设节点处位置坐标为(x,y),N个基站的位置坐标为(xi,yi)。 根据其几何意义,则坐标之间存在以下关系:
其中,i =1,2,3,…,N,设:Ki =xi2+yi2,R =x2+y2,将公式(3)化简得到:
要得到坐标(x,y),即求得X的值,可利用最小二乘法可得X =(ATA)-1ATY,进行求解计算。
因该方法部署过程方便且性价比高,特别适用于室内、岩洞、森林、峡谷等GPS 拒止环境下的目标定位,并且随着环境以及技术的变化,该算法在不断的被改进更新。 该算法主要应用于WIFI 室内定位技术和UWB 室内定位技术中。
3.3 TDOA 定位算法
到达时间差算法TDOA,是对TOA 算法的改进与加强,只需保持各基站时钟同步即可。 该算法主要利用多个基站接收到同一信号的时间差计算出对应的距离差,再确定信号源所在位置。 定位示意如图3 所示:
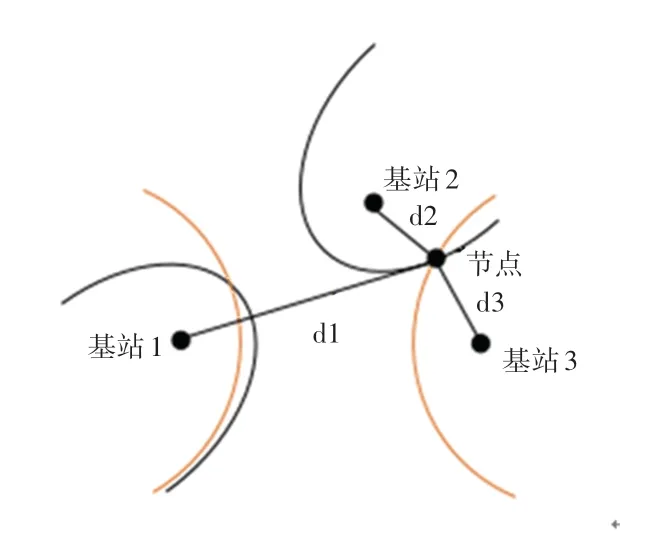
图3 TDOA 定位示意图Fig.3 TDOA positioning schematic diagram
各个基站从同一时间开始接受信号源的信号,根据信号接收端接收到数据的时间不一,会产生一个时间差,再通过相关的计算公式,计算出各个基站之间的距离差,距离差=时间差×电磁波的速度。 如图3 所示,可以选取基站1 作为相对固定点,分别与其他基站联合作为焦点,可以得到两条双曲线,两条双曲线的交点就是信号节点所在的位置。 通过各基站的坐标以及各基站到节点的距离,就可以计算出节点处坐标。
TDOA 算法的优势是不存在任何相位模糊问题,且该系统构建复杂度较低,定位精度相对高,常常被应用于各种室内外定位技术中[15]。 随着定位精度需求的不断提高,该算法也被多次改进,其中包括基于TDOA 的Fang 算法、Chan 算法以及泰勒级数法等等。
3.4 指纹定位算法
指纹定位算法是基于无线信号的室内定位中比较经典的定位算法,其主要思想就是将某一需要进行定位的区域进行网格划分,将这些网格的交点分别设置其对应坐标,在每一个坐标上,都可以收到一组对应接入点(Access Point,AP)的特征量,这组特征量就相当于一个指纹上的多个特征(这也是位置指纹这个名字的由来,指纹只是一种比喻),依靠这组特征就可以确定定位节点所在的网格位置。 该方法的实现分为离线采集和在线测试两个阶段[16]。
离线阶段负责采集指纹信息,通过将某一需要进行定位的区域进行网格划分,对每个交点处分别设置对应坐标后,采集每个小网格区域内所表现出来的RSSI 值,将指纹信息图片化处理,然后构建指纹数据库。
在线阶段进行定位测试,通过相关算法得到待测点处RSSI 值以及大致坐标值,与数据库中的指纹坐标信息进行匹配对比,从中找出与待测点处RSSI值最为接近的点,此点的坐标就可视为待测点处坐标。 该阶段可采用Bayes 法、KNN 法进行坐标加权计算,用K-means 等方法对指纹数据进行聚类运算[17],减少匹配时间。
指纹定位算法的精确度,很大程度取决于指纹信息分类的精细程度,分类越精细,定位精度就越高。 因此,可以结合分类器对指纹信息进行分类,以此提高定位精度。 但是,该方法也存在很大的不稳定性,当周边环境变化或者基站数量或位置变化时,该定位算法精确度就会很低,而且需要进行指纹信息重新采集,而采集工作相当繁琐,任务量较大。 因此,该算法时常与WIFI 定位技术相结合应用于室内定位。
3.5 RSSI 测距定位算法
RSSI 信号是将RSS 经过转换后的值,RSSI值由无线局域网的供应商按照自己特定的方式去定义。将原有的RSSI区间值通过特有的公式,对应到自己定义的区间。 室内定位常用对数距离路径损耗模型,从而得到以下计算公式(4):
其中,RSSI(d0) 即为距离发射点d0 处的RSSI(仅为参考点),往往以1 m 作为这个参考点;RSSI(d) 是与发射点相差d处的RSSI;Xσ是一个均值为0,方差为σ变量,并服从高斯分布;n为信号衰减指数,与环境有关,通常值为2~4 之间。 根据所搭建的模型,可得到发送端距离接收端的长度d,不同发送端所在的位置不一,所以得到同一接收端的距离也不同,最后依据多边定位等计算方法,计算出大致的位置坐标[18]。
4 结束语
本文从对定位技术的需求出发,对多种室内外定位技术以及相关定位算法进行概括阐述,得出其各自适用的领域与环境。 由于复杂多变的环境,导致定位精度的大大降低,现存的单一定位技术已无法满足目前的发展需求,多种定位技术甚至算法的融合定位才是未来室内外定位的发展方向。 目前的融合定位系统并未成熟,迫切需要新技术的投入,而5G 通信技术的兴起给该领域带来新的机遇,尤其是当下正处于探索阶段的”北斗+5G”融合定位技术,是未来定位系统领域的重点研究对象。
