基于机器学习算法的人体步态异常状态检测与识别方法
2023-10-31耿宝光
郭 惠, 耿宝光
(1 山西旅游职业学院, 太原 030031; 2 山西工程职业学院, 太原 030031)
0 引 言
随着社会的快速发展和科技的不断进步,人体步态智能检测与识别逐渐成为研究的热点。 人体步态在犯罪侦查、生物识别以及健康监督等众多领域中具有广泛的应用价值。 因此,准确、高效的人体步态智能检测与识别方法的设计与研究成为迫切需求。 步态异常可能会导致许多问题,如在工业生产中,员工的步态异常可能会影响工作效率和工作安全,而在体育运动中,运动员的步态异常可能会影响训练质量和运动表现[1]。 这种异常状态可能是由身体疾病、运动损伤等原因导致的,如果步态异常未及时发现和处理,还可能导致进一步的身体损伤或恶化现有的健康问题,故确立一种能够快速、精准地检测人体步态异常状态的方法对个体生活质量和身体健康的保障显得尤为必要[2]。 传统的人体步态检测与识别方法受限于技术和算法的局限性,主要依赖于医师或专业机构的手动检测和评估,存在着测量不准、主观偏差强等问题[3]。 近年来,随着机器学习算法的崛起,特别是深度学习网络的成功应用,使更加有效地探索和发掘人体步态智能检测与识别变为可能[4]。 故本文引入机器学习算法,研究人体步态异常状态检测方法。 通过构建人体步态模型、进行步态检测和二值化后处理、提取步态运动特征以及识别异常状态等环节,提出一种人体步态智能检测与识别方法。 同时,通过对比实验,选择适当的实验指标,并进行实验结果和分析,以验证所提方法在准确性和实时性方面的优势。
1 人体步态异常状态检测与识别方法研究
1.1 人体步态模型构建
本文以国家语言资源监测与研究中心(National Language Resources Monitoring and Research Center,NLPR)创建和管理的视频数据库为数据来源,其中包含了人体步态视频数据,可用于对人体步态模型的构建。 为了对人体步态进行检测,从中提取部分人体步态视频数据,针对每一个视频数据,存储每一帧作为独立的图像,并按照时间顺序进行排序,形成一个图像序列。 针对获取到的人体步态图像序列,构建人体步态模型。 通过运动检测,结合人体轮廓特征结合的方式寻找质心,并按照人体四肢与身高的比例,将其合理划分为7 个不同区域。 如图1 所示,按照比例大小以及从上到下的顺序,将人体分为4 个部分,分别为头部(A)、躯干(B、C)、大腿(D、E)和小腿(F、G);再沿着人体的重心,对人体从侧影划分为前、后两部分(头部除外)。
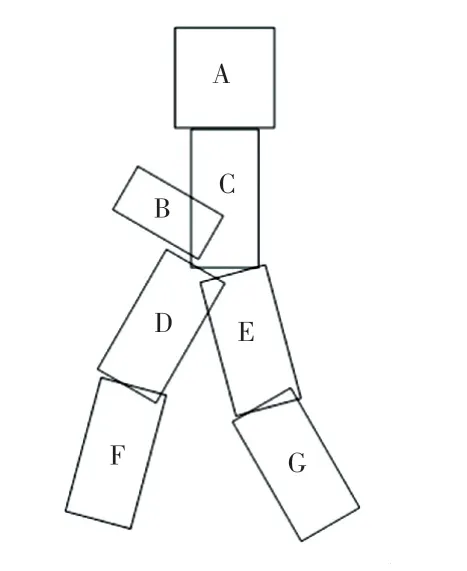
图1 人体步态结构划分示意图Fig.1 Schematic diagram of human gait structure division
利用矩形i的参数矢量进行描述:
式中:fi表示矩形i的参数矢量,(xi,yi) 表示矩形i的中心位置,ki表示矩形i长和宽的比值,αi表示矩形i长轴的方向矢量,ji表示矩形i长轴的长度。 其中,i的取值为大于或等于1,且小于或等于7 的整数。
将上述公式作为人体步态模型,其结构简单易于实现,且具有较强的抗噪声能力。 通过本节的步骤,可以构建出一个有效的人体步态模型,为后续的人体步态异常状态检测与识别方法提供基础。 相比于仅从整个身体出发的步态描述,该模型更加细致、恰当地划分了身体的区域,能够更加精确地刻画出身体的姿态,实现身体姿态的重建。 新颖的模型可以提升对步态异常的敏感性和准确性,从而实现更精确、可靠的步态异常识别。
1.2 人体步态检测与二值化处理
在人体步态异常状态检测和识别方法中,人体步态检测是一个关键步骤。 为了使构建的模型更加精准地分析和处理人体步态数据,首先检测出人体在视频图像序列中存在位置。 在上文构建人体步态模型时,已将人体步态从视频图像序列中提取出来,则需要从视频图像序列中,恢复人体步态图像中的背景图像,使人体步态及其背景图像构成一个整体,进而以整体为单位开展进一步的步态检测及二值化处理。 假设l表示一个包含了N帧的图像序列,则其背景图像可以用下述公式进行描述:
式中:Bxy表示视频图像序列中的背景图像,qxy表示某一像素点(x,y) 位置上的灰度计算结果。 移动像素是由背景图像和当前图像的差异得到的[5]。 由于移动的像素点可能属于背景图像区域,也可能属于前景目标区域,故提出一种基于人类行走轨迹的像素识别算法。 引入贝叶斯规则进行分类,其表达式为
式中:s表示像素点,vt表示在某一时刻t时像素点的颜色值,f表示贝叶斯函数,b表示像素点集合。
在上述条件基础上,针对某一像素点在某一时刻颜色为vt时属于前景或背景的概率进行计算。 对统计结果进行二值化处理,将步态图像转换为二值图像,结果如图2 所示。
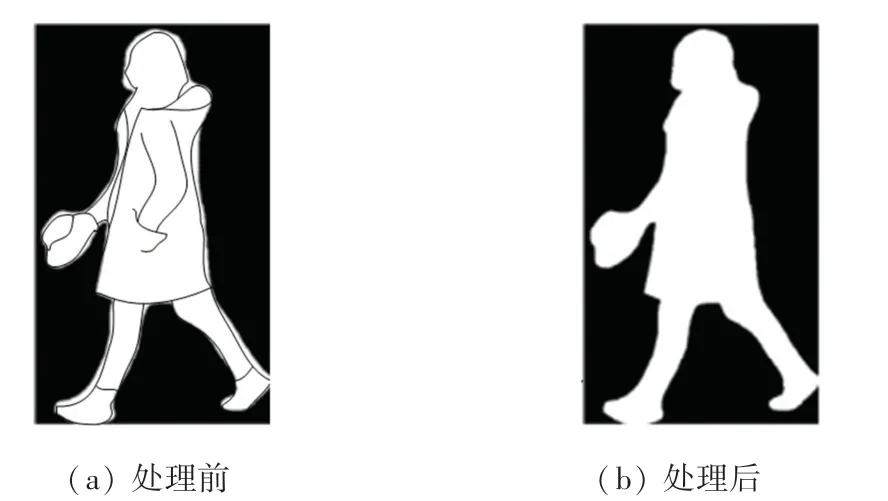
图2 二值化处理后人体步态图像前后对比示意图Fig.2 Comparison of human gait images before and after binarization
二值化是一个重要的数据预处理步骤,可以强调步态图像中的形态特征,并抑制不相关的图像信息。 从图2 中可以看出,经过二值化处理的人体步态图像在一定程度上去除了与检测目标无关的冗余部分。 由于目前还没有一种完全理想的检测算法,因此二进制探测结果中仍有少量的孔隙或小块。 在上述过程中,逐步实现了人体步态模型的进一步完善与优化,对于后续的人体步态运动特征提取过程来说,此步骤能够有效降低冗余数据带来的干扰,使特征提取和人体步态异常状态检测结果更加精准。
1.3 人体步态运动特征提取
以上述构建的人体步态模型作为基础,便可以通过模型来重构人体姿势。 但考虑到人体步态本身具有一定的时空运动特性,因此需要提取步态变化信息。 通过提取与人体步态相关的特征,可以将复杂的运动模式转化为一组更具表征性和易于处理的姿态变化序列。 在提取步态变化信息前首先应当明确的是,虽然两个长相相似的人也可能会有几个完全一样的姿态,但由于人体步伐中包含了个人的信息,因此姿态间的连续变化曲线也会有所不同。 随着人体的运动过程对人体运动轨迹进行分析时可以发现,每帧间的变化信息与直接通过每帧信息提取进行识别相比具有更高的可靠性和说服力。 因此,针对上述人体形态模型,只考虑其矩形模型的前3个作为参数,由此实现对人体步态运动特征的提取。
取一个周期内的步态序列,假设其长度为L。从该序列当中得到各个帧的人体态势表达为Ft,构成一个28×L的矩阵F。 通过计算,得到在某一时刻t时的人体姿态变化矢量。 由于人行走时会受到多种因素的影响,因此步速通常是不一致的,所以L的取值也不同。 针对这一特点,对步态序列在时间域上进行归一化处理。 结合动态时间规整的方式,将一系列不同长度的步伐调整到长度均为N的序列。 根据上述设定,得到变化序列为
式中:Dl表示序列l的姿态变化序列。 由于在人体步态序列中,人体距离摄像机的距离是可以随意改变的,因此还需要结合上述逻辑,对视频序列进行幅度上的归一化处理。 处理后将所有序列汇总,并构成人体步态特征矩阵。 在得到归一化处理后的步态特征矩阵后,利用矩阵中的特征表现人体步态运动本质,并用于后续的异常状态识别。
本节根据实际需求,选择了适宜的特征提取方法,以提高系统的性能并提供更有效的异常状态识别结果。 通过对人体步态运动特征的提取,可以将复杂的步态信息转化为简化且有代表性的姿态变化序列,进一步用于后续的人体步态异常状态识别。
1.4 人体步态异常状态识别
为实现对人体步态异常状态的识别,引入机器学习算法,运用其中的决策树,实现对象属性与对象值之间的映射,使得人体步态的状态更易于理解和实现,并在较短的时间内实现对海量数据源的处理与分析。 该方法把相同人体的多个步态作为一组,利用马氏距离来衡量人体多个步态的相似性。 相似度的测定过程可用下述公式形式表示为
式中:M(l,Gi) 表示序列与步态数据库中序列之间的相似度测定结果,Gi表示数据库当中某一类步态序列,μi表示Gi的均值,∑i表示Gi的方差。
将上述测定操作导入机器学习算法的决策树当中,根据相似度测定结果对人体步态进行决策。 决策依据为:M(l,Gi) 测定结果的数值越小,距离度量越小,相似性越高;反之,M(l,Gi) 测定结果的数值越大,距离度量越大,相似性越低,则判定人体步态处于异常状态。 为进一步体现人体步态异常状态识别能力,引入机器学习算法中的NN 分类器(最近邻分类器)和KNN 分类器(K-近邻分类器)。 NN分类器就是将一个被试序列划分为最接近其的一个步态;KNN 分类器是指在距离测试序列最近的K个序列中,选择同一类型中所占比重最大的一个,将其作为测序序列的归属类别,则不属于归属类别的序列可被判定为人体步态的异常状态。 根据马氏距离,将被测量的数据分成最短的两个类别。
2 对比实验
为实现对上述基于机器学习算法的识别方法应用优势的检验,选择将NLPR 数据库作为此次实验的数据集,将基于Hopf 振荡器的识别方法和基于步态触觉信息的识别方法分别作为对照A 组和对照B组,将本文设计的识别方法作为实验组,开展对比实验研究。
2.1 实验指标选择
在上述选择的数据集当中包含了10 个人的步态序列,针对每个人的步态序列都包含了3 种不同角度,分别为0°、45°和90°;每个人对应的每个角度都包含5 个序列,共计150 个序列。 首先,实验过程中采用计算机仿真的形式,对3 种方法的识别率进行对比。 识别率CRR的计算公式为
式中:T表示正确识别的个数,W表示待识别样本总数。
2.2 实验结果及分析
根据上述公式,计算得出3 种方法在不同角度条件下针对每组步态序列识别后得到的正确识别率,并选取最好正确识别率(CRR值最高)的结果。结果记录见表1。

表1 3 种识别方法最好识别率对比表Tab.1 Comparison of the three recognition methods
从表1 结果可以看出,在多种不同条件下,实验组方法的最好识别率均高于对照A 组和对照B 组。进一步分析得出,尽管3 种方法在识别时其性能会受到角度条件的影响,但实验组方法最好,识别率始终高于90%,而对照A 组方法和对照B 组方法的最好识别率明显降低,识别结果严重不符合人体步态识别的高准确性需要。 由此证明,本文所提方法可以实现对人体步态异常状态的高准确率识别,且受到人体步态观测角度的影响较小,具备较高的应用价值。
在此基础上,针对3 种识别方法的识别精度进行对比,选择将识别到的人体步态步长作为识别对象。 实验前,明确每个人体步态序列中每步的步长,对比实际步长与通过3 种识别方法得到的结果,若误差小,则说明识别精度高。 实验结果见表2。
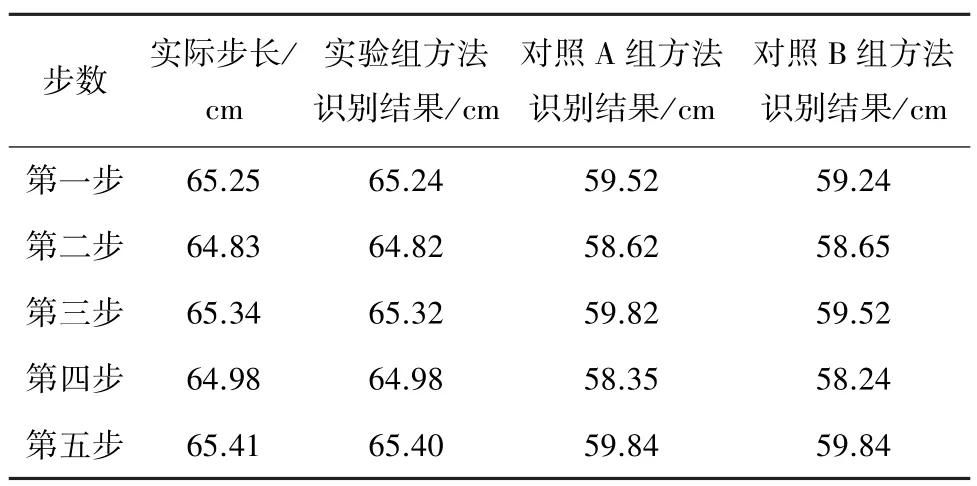
表2 3 种方法识别精度对比表Tab.2 Comparison of recognition accuracy of three methods
从表2 中数据可见,实验组方法识别结果与实际步长之间误差不超过0.05 cm,而对照A 组和对照B 组方法的误差均超过这一范围。 说明本文设计的识别方法不仅具备更高的正确识别率,同时能够实现对人体步态的高精度识别。
3 结束语
本文研究了机器学习算法在人体步态异常状态检测与识别中的具体应用,并提出了一种全新的检测与识别方法。 将该方法应用于实际可以实现对人体步态异常状态的准确识别,为人体目标状态的跟踪提供便利条件。 在后续的研究中,将研究重点集中在更好地实现人体步态异常检测,克服视角变化的依赖性等方面,从而促进该方法的应用性能得到进一步提升。
