改良体位预防达芬奇机器人保肾术中压力性损伤的效果
2023-10-30何晓燕林秋红
何晓燕 林秋红
皮肤是人体最大器官,其屏障功能主要为对水分的平衡调节及预防外源物质的入侵。医源性皮肤损伤是由于医疗活动中操作不当或仪器故障所造成的与原发病无关的皮肤损伤,主要表现为皮肤发红、表皮破损、角质层缺失、压力性损伤等[1]。术中压力性损伤是因局部组织长时间受压、血液循环受阻导致的皮肤破损或坏死,是手术患者常见的并发症之一[2-3]。术中压力性损伤好发于骶尾部、骨突处,不利于原发疾病恢复,增加治疗难度,延长治疗时间,并会增加患者痛苦[4]。据相关数据统计,国外医院获得性压力性损伤发生率约为5.4%,其中由术中产生的压力性损伤发生率约占总比例的34.5%[5]。达芬奇机器人手术是一种先进的微创外科手术,由医生操控机器人实施手术。与普通腹腔镜比较,达芬奇机器人手术具有三大优势:(1)与人手相媲美的灵巧性。(2)机械手的高度稳定性。(3)放大15 ~20 倍的立体高清晰度[6]。达芬奇机器人手术系统在肾部分切除术中的应用,使得手术精准度大大增加,扩大了手术视野角度,使操作医师能够在有限的空间内从不同的角度对病灶进行切除;但是达芬奇机器人手术系统也存在一定的局限性,比如其空间占据范围比较广,在受力反馈以及触觉感知体验方面有待提升;如果患者术中体位摆放不到位,极易导致机器人底座挤压肢体或机器臂碰撞肢体,对患者造成术中压力性损伤[7]。为此,厦门大学附属第一医院泌尿外科机器人手术团队自行研发设计一种改良式术中体位管理,并基于此探究改良式70°侧卧位在达芬奇机器人辅助肾部分切除术中的应用效果及安全性,以期为临床实践提供参考,现报道如下。
1 资料与方法
1.1 一般资料
选取2021 年1 月—2023 年2 月在厦门大学附属第一医院泌尿外科住院并行达芬奇机器人辅助经腹腔肾部分切除术治疗的患者100 例作为研究对象。严格筛选符合研究要求的患者,采用随机数字表法分为对照组(实施常规体位管理,n=50)与观察组(实施优化体位管理,n=50)。对照组男性25 例,女性25 例;年龄47 ~73 岁,平均(56.12±4.26)岁;肿瘤直径3.76 ~6.42 cm;肿瘤部位:左侧24 例,右侧26 例。观察组男性28 例,女性22 例;年龄45 ~72 岁,平均(54.58±4.38)岁;肿瘤直径3.79 ~6.45 cm;肿瘤部位:左侧27 例,右侧23 例。两组一般资料比较,差异无统计学意义(P>0.05),具有可比性。 纳入标准:(1)经组织病理学和MRI 确诊为肾癌,行肾部分切除手术[8]。(2)接受并符合达芬奇机器人手术治疗指征。(3)美国麻醉医师协会(American Association of Anesthesiologists)处于Ⅰ~Ⅱ级。(4)能正常沟通。(5)无先天畸形。排除标准:(1)肿瘤晚期或转移性肾癌。(2)合并其他恶性肿瘤。(3)研究过程中失访患者。(4)合并有重要脏器严重基础疾病或术后严重并发症者。(5)临床资料不完整。本研究经厦门大学附属第一医院伦理委员会批准(XMYY-2022KYSB120),并且所有患者均签署知情同意书。于两个试验组中随机抽取参与手术的医护人员各 20 名。
1.2 方法
对照组采用常规体位进行手术,对患者进行全身麻醉后由主刀医生发起当台护士和麻醉医生共同完成术前安全核查,根据患者术前检查结果确定手术部位,协助患者取90°侧卧位。具体方法:(1)手术床呈“人”形,抬高腰部,手术部位对准手术床背板重叠。使患者腰背部呈一直线,充分暴露手术区域。(2)上腿伸直,下腿屈曲,腿间垫一大软枕,约束带固定肢体。(3)头侧垫高,防止颈部过伸。(4)体位安置完毕及拆除挡时应妥善固定患者,防止坠床。(5)缝合切口前及时将腰桥复位。
研究组采用改良式70°侧卧位对患者进行手术,具体方法:(1)四肢体位管理,措施1 →患者健侧上肢呈举火炬式固定于手架上,术侧上肢贴于患者体侧,利用手术薄膜可靠固定。改进2 →下肢约束方法:下肢下腿弯曲,上腿伸直,两腿间垫一大软枕,并用约束带固定,术中加强巡视及时调整约束带的松紧度,松紧度以容纳一指为宜,双脚踝处用啫喱垫保护,防止压疮,适当抬高手术床尾板,防止双腿下垂。改进3 →管道连接处三通保护器的运用:术前根据三通或是动脉接口位置在患者手臂上贴上大小合适美皮康,使患者皮肤与三通或动脉穿刺接口隔开,防止手臂皮肤压疮。改进4 →在机器人床旁器械臂与鞘卡对接后,护士认真测量机械臂与患者患侧上臂身体间的距离,要求能容纳一拳,术中每30 min 巡视1 次。及时提醒医生调整机械臂角度。(2)改良面部体位管理:采用科室自制的保护面枕,根据人脸五官中间对应眼口鼻,并用贴膜保护患者双眼,将记忆棉与患者面部妥善固定。
1.3 观察指标
(1)手术情况:包括术中体位摆放时间、手术时间、术中出血量、术后下床活动时间、住院天数等。
(2)观察两组收缩压(systolic blood pressure,SBP)、舒张压(diastolic blood pressure,DBP)、心率(heart rate,HR)等体征变化,由麻醉医生负责记录。
(3)统计两组术中压力性损伤:根据《术中获得性压力性损伤预防与护理专家共识》[9],从患者活动力、皮肤潮湿情况、术中剪切力、术中摩擦力等方面来评估,从而判断患者是否发生术中压力性损伤。术后即观察评估两组患者在摆体位时易受压面部、腰部、肩背部及其他部位皮肤状况。
(4)统计两组发生机械臂碰撞率、机械臂故障次数和静脉输液不畅率。
(5)于两个试验组中随机抽取参与手术的医护人员各20 名,采取问卷调查的方式,收集医务人员对体位管理的满意度,所采用的问卷其选项为:满意、一般和不满意。满意度=(满意+ 较满意)例数/总例数×100%。
1.4 统计学方法
采用SPSS 19.0 统计学软件进行数据分析。计量资料以(x-±s)表示,进行t检验;计数资料用n(%)表示,行χ2检验。P<0.05 为差异有统计学意义。
2 结果
2.1 研究组与对照组术中出血量及术后恢复情况比较
两组术中出血量和住院天数比较,差异无统计学意义(P>0.05);但研究组体位摆放时间和手术时间、术后下床活动时间明显短于对照组(P<0.05),见表1。

表1 研究组与对照组术中及术后恢复情况比较(x- ±s)
2.2 研究组与对照组体位安置前后生命体征指标比较
体位安置前两组的生命体征指标水平比较,差异无统计学意义(P>0.05) 体 位; 安 置 后 两 组 SBP、DBP、HR 等指标均有改变,但组间比较差异无统计学意义(P>0.05),见表2。

表2 研究组与对照组体位安置前后生命体征指标比较(x- ±s)
2.3 研究组与对照组术中压力性损伤发生情况
研究组术中压力性损伤的发生率明显低于对照组(P<0.05),见表3。

表3 研究组与对照组术中压力性损伤发生情况[例(%)]
2.4 研究组与对照组术中机械臂碰撞、机械臂故障及静脉通路不畅发生情况比较
两组术中机械臂故障及静脉通路不畅的事件发生率比较,差异无统计学意义(P>0.05);但研究组机械臂碰撞发生率明显少于对照组(P<0.05),见表4。
2.5 研究组与对照组医生及护士的满意度比较
研究组医生及护士对改良体位的满意度评价均较对照组明显提升,差异有统计学意义(P<0.05),见表5。
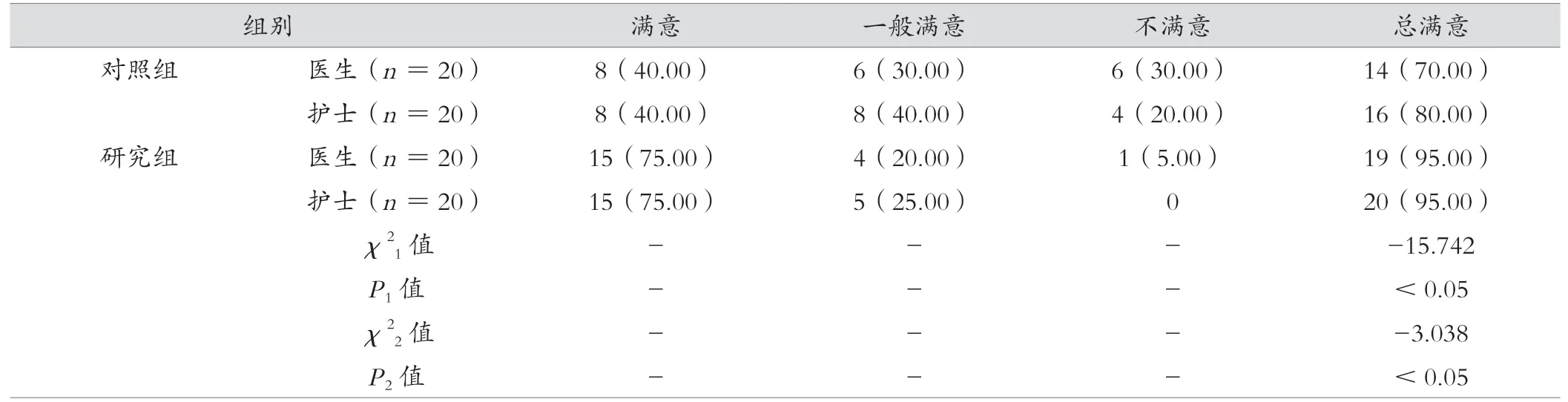
表5 研究组与对照组医生及护士的满意度比较[例(%)]
3 讨论
随着手术技术的发展,达芬奇机器人具有很好的立体高清视野和10 倍光学放大效果,可灵活控制和操作,减少医生的体力消耗;另外其稳定性可避免人工操作时的抖动,提高了手术的灵活度和精细度,进而提高手术效果,为临床各类重疾提供了极佳的操作平台[10-11]。然而机器人手术对体位的要求较高,既要满足手术操作需要,也要保证患者舒适安全[12]。合理的体位安置能够为机械臂定泊提供空间,也能确保手术视野的清晰暴露,稳定患者的血流动力学指标,避免外周神经压迫,是保证手术成功的关键[13]。
当前达芬奇机器人辅助腹腔镜下肾部分切除术常规体位为90°侧卧位,然而这种传统体位不仅增加体位摆放时间和体位摆放的工作量,也增加了机械臂碰撞发生率和术中压力性损伤的风险。本研究使用改良体位管理,结果显示:研究组体位摆放时间和手术时间、术后下床活动时间明显短于对照组(P<0.05);研究组术中压力性损伤的发生率明显低于对照组(P<0.05);且研究组机械臂碰撞率明显少于对照组(P<0.05);说明改良后的体位管理有效降低了术中压力性损伤的发生率及机械臂碰撞发生率,并减少了体位摆放时间,进而使得手术时间缩短,有利于术后快速恢复,提高了患者医生护士满意度。为更好地配合机器人辅助手术的完成,巡回护士应提前准备好摆置体位所需的各种体位垫,加强术中体位管理,保证手术顺利进行[14]。究其原因,研究组采用改良体位管理:(1)四肢体位管理的改良,患者健侧上肢呈举火炬式固定于手架上,术侧上肢贴于患者体侧,利用手术薄膜可靠固定,避免腋窝神经血管损伤。下肢两腿间垫枕,约束松紧适宜术中及时调整,防止骨凸位置压疮发生。(2)面部体位管理的改良,本研究选择的面部保护罩,对患者的头面部进行保护,预防镜头臂摆动过程中误伤患者头面部;同时此面罩能够有效地悬空眼、鼻、口,减少持续受压而导致压伤的可能,有利于气管插管的保护。(3)输液管路的保护,术中采用自制管道保护器,并在三通位置贴上美皮康防止输液管道造成压疮。(4)机械臂调整:机器人泊位后检查器械臂与患者肩部的距离是否可以放入一拳;器械臂上下移动时,是否有足够的空间,如感觉空间过小,需立刻进行调整。由于达芬奇机器人泊位后,无法再对体位进行调整,故机械臂泊位前合理舒适的体位摆放至关重要。合理舒适的体位摆放有利于术野充分显露,有效地防止术中压力性损伤,减少机械臂碰撞,保证手术顺利进行,避免不必要的手术并发症。另外,本研究显示,研究组医生及护士对改良体位的满意度评价均较对照组有明显提升(P<0.05),可见改良后的体位不仅对患者有益,同时也减少医护人员的工作量,提高工作效率及其满意度。但两组术中出血量和住院天数以及体位安置前后各组的生命体征指标水平比较,差异均无统计学意义(P>0.05),且两组术中机械臂故障及静脉通路不畅的事件发生率比较,差异均无统计学意义(P>0.05);说明改良体位管理不会增加术中出血量和医疗事故的发生率,对患者术前术后生命体征的波动也无影响。机械臂的性能,术中静脉通畅,与体位改良也没太大关系。但术后住院天数未发生变化的原因可能与本研究入选的样本量较少,且大多患者病情稳定,均能顺利恢复有关[15]。
综上所述,改良体位的实施可有效预防达芬奇机器人辅助肾部分切患者术中压力性损伤的发生,减少机器臂碰撞的发生,缩短体位摆放用时和手术耗时,同时也提高医护人员满意度,保障手术安全高效。
