无人直升机卫星测控通信应用研究
2023-10-28李怡伟
李怡伟
智能化、无人化是当今世界装备发展的重要方向,无人直升机因其零伤亡、起降要求低、机动灵活等优势被广泛应用到军、民用领域。在军事应用领域,无人直升机可执行侦察警戒、通信中继、电子对抗、目标指示、火力支援以及战勤运输等任务;在民用领域,可执行警务巡检、新闻摄影、海洋监测、电网巡检、农林作业、应急求援等任务。当前无人直升机主要采用视距数据链与控制站进行上下行数据传输,其通视距离受无人直升机飞行高度限制,且通信质量受地形约束明显,中继机虽在一定程度上缓解了上述问题,但作用距离仍然受限且使用方式不够灵活。卫星通信具有不受地理位置限制,覆盖面广、频带宽、机动灵活等优点,已成为无线通信的重要手段,将卫星通信應用于无人直升机测控通信,可充分发挥两者优势,应用前景广阔。
据资料报道,日本在2004年12月首次成功研制出直升机卫星通信系统。经过近20年的发展,国内外机载卫星通信系统均取得了不同程度的进步,并在部分有人直升机和固定翼无人机上安装使用,但卫星通信系统在无人直升机上的应用研究却很少。相比于有人直升机,卫星通信作为无人直升机超视距测控通信手段,其对传输速率、实时性和抗干扰能力要求更高;相比于固定翼无人机,无人直升机上的卫星通信系统会受旋翼遮挡影响且安装位置有限,对机载天线的尺寸、重量都有严格的限制和要求。因此卫星通信系统在无人直升机测控通信中的应用面临诸多挑战。
本文在总结国内外直升机机载卫星通信系统项目经验的基础上,全面梳理了无人直升机卫星测控通信系统选型和装机设计流程,参考直升机机载卫星通信系统装机位置,给出了无人直升机卫通机载站安装建议。同时结合当前无人直升机常用机载架构,设计了一款简洁高效、通用性强的卫通机载站通信架构,具有较好的工程指导意义,为无人直升机卫星测控通信应用提供了方向。
国内外研究现状
国外研究现状
日本和美国是开展直升机卫星通信应用研究最早的国家。2004年12月2日,日本信息通信研究机构(NICT)宣布成功开发出了全球第一个“直升机卫星通信系统”,能够通过通信卫星实时传送灾害现场影像情况,其工作在Ku频段,机身两侧分别安装用于发射和接收的Ku相控阵天线,如图1所示。2013年,日本三菱公司的HSA40直升机卫星通信系统采用Ku频段抛物面天线,用于传输图像、话音、数据等业务类型,天线口径0.4m,尺寸φ550mm×600mm,如图2所示,业务速率前向16kpbs,返向384kbps-10Mbps,舱外设备重35kg,舱内设备重20kg,设备功耗小于900W。
美国早期将研发的卫星通信系统应用在阿帕奇直升机上,在机身两侧各安装一个机载卫通天线以保证直升机在不同姿态下通信链路的可靠性。2009年,ViaSat公司研发出VMT-1200HE型Ku频段卫星通信设备,并将其应用在美国“黑鹰”直升机上,其天线安装于“黑鹰”直升机机身与尾梁的结合部,如图3所示。
以色列将以色列飞机工业公司(IAI)的EL/K-1891宽带卫星通信系统安装在AH-64D-1“长弓阿帕奇”武装直升机两侧,天线采用X/Ku波段相控阵天线,同时配置100W功放,重量小于24kg,功耗小于800W,传输体制CDMA/TDM,传输率为128kbps。设备安装位置如图4所示。
国内研究现状
近年来,国内一直在致力于直升机卫星通信系统的研究,也取得了一些成果。清华大学研制的直升机卫星通信系统具有抗旋翼遮挡的能力,并成功应用于“神八”的返航搜救保障任务,返向链路有效信息速率为7.68-9.2Mbps;如图5所示的直升机宽带卫星通信系统已经成功的应用在北京奥运安保通信保障和大兴安岭森林防火的空中监测等任务中,该系统配置两套0.8m天线和2台大功率功放,安装在某中型运输直升机上,加装该天线后由于重量以及风阻增大,对直升机的飞行造成影响,其最大速度由250km/h减小到220km/h该系统采用缝隙通信检测技术,两台天线依据缝隙交替工作,通信速率可达5Mbps。
2009年开始,相关部门组织国内部分单位开展了直升机卫星通信系统的研究,卫星声像传输系统采用平板阵列天线单元形式,天线安装在直升机尾梁上。系统搭载机型为某中型运输直升机,直升机向地面站传输一路图像与两路话音数据。
如何利用旋翼缝隙进行信号传输是直升机和无人直升机卫星通信的关键技术之一,上述直升机卫星通信研究成果同样适用于无人直升机。此外,针对特定无人直升机,合理地进行卫星通信系统选型和装机设计才能充分发挥无人直升机和卫星测控通信的双重优势,这也是无人直升机卫星测控通信推广应用需要重点关注的问题。
卫星测控通信应用研究
系统组成
基于透明转发卫星的无人直升机卫星测控通信系统通常由地面卫通车和无人直升机卫通机载站组成,地面卫通车接收指挥控制车的控制指令发送给透明转发卫星,通过透明转发卫星转发至无人直升机卫通机载站,卫通机载站接收无人直升机各系统状态及业务数据发送给透明转发卫星,通过透明转发卫星转发至地面卫通车进而发送至指挥控制车,其工作原理如图6所示。
一般卫通地面站对重量、功耗、体积要求不敏感,可以根据使用需求配备中型或者大型地面卫通车,天线尺寸有2-6m等多种规格。但卫通机载站受机载空间、重量重心、供电能力等多种因素限制,其尺寸、形态、重量、功耗会被严格限制,卫通机载站性能指标设计需综合考虑无人直升机信息传输需求、载重能力、空间布局、供电能力等多种因素,此外卫星资源、使用环境等也对卫通使用频段等的选择至关重要。
卫通机载站通常包括卫通天线组合和卫通信道设备。卫通天线组合主要完成卫星信号的接收和发射以及变频处理,主要由天线面、伺服和射频单元组成。卫通信道设备具有信号调制、解调和编解码等功能,主要由电源单元、基带单元、监控单元和调制解调单元组成。
下面主要针对无人直升机卫通机载站进行选型和装机设计流程梳理,并提出一种通用通信架构,用于指导无人直升机卫通测控通信的工程实践。
选型和装机设计
无人直升机卫通机载站选型主要指对其性能指标进行论证设计,如工作頻率、传输速率、天线尺寸、重量功耗等,平衡传输需求、无人直升机平台性能、卫通机载站设计能力等多方面因素,使无人直升机系统效能最佳。无人直升机卫通机载站装机设计主要包括安装设计、供电设计、通信设计、天线辐射遮挡分析、链路余量计算等工作。选型和装机设计两者关联紧密,需经过多轮迭代达到平衡,通用流程如下:
(1)识别需求:依据顶层要求和任务需要,分解并收集卫通测控通信传输需求,如传输速率、接口需求等;
(2)初步方案:依据需求和项目经验,进行方案初步设计,形成初步数模并评估重量、功耗;
(3)装机协调:依据初步方案,对装机位置、重量重心、电气负载等进行协调,同时对天线辐射遮挡、链路余量等进行计算分析,初步评估可行性,并提出修改建议;
(4)迭代完善:依据建议,评估需求可否变更、方案能否优化,设计新的方案再次进行装机协调,不断迭代,最后形成一个切实可行的结果。
同有人直升机一样,旋翼上方安装卫通机载站的难度较大,通常需要安装在旋翼下方,因此天线面会受到旋翼的遮挡,引起信号质量的下降,而且在飞行过程中,无人直升机的航向和姿态会发生变化,机身也可能对天线面产生遮挡,影响卫星通信效率,这需要从装机位置和卫通波形体制两方面共同解决,抗旋翼遮挡的通信技术主要包括缝隙检测技术、分组重发技术、物理层编码技术、喷泉编码+物理层编码技术等。装机位置则需要卫通天线尽量远离旋翼中心减小遮挡面积和时间,同时尽量布置在机身较高的位置避免机体遮挡,或者通过多个天线进行补盲,但多个天线补盲的方式会增加重量、功耗,代价较大。此外,卫通天线应尽量与无人直升机采取共形设计,减少阻力。
通用通信架构
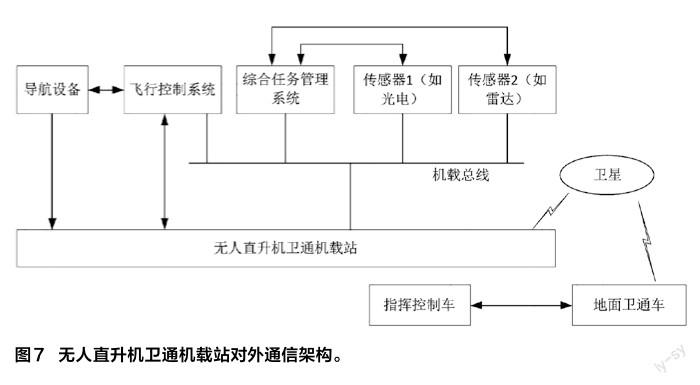
为实现无人直升机卫星测控通信,无人直升机卫通机载站需接入无人直升机机载系统,一方面将接收的控制指令转发给各机载设备,另一方面收集各机载设备状态回传给指挥控制车,同时将无人直升机通过各个传感器获取的情报信息转发给指挥控制车,因此无人直升机卫通机载站对外通信架构如图7所示。
无人直升机卫通机载站对外通信信息主要如下:
(1)导航设备:无人直升机卫通机载站可以从导航设备获取无人直升机姿态、位置等信息,用于引导无人直升机卫通机载站中卫星天线指向,保持卫星天线与卫星的实时联通,保障链路稳定和信息实时传输;
(2)飞行控制系统:无人直升机卫通机载站可以将飞行控制相关指令发送给飞行控制系统,由飞行控制系统转发至各个机载设备,如电气系统、旋翼系统等;同时从飞行控制系统获取各个机载设备工作和健康状态;
(3)综合任务管理系统:无人直升机卫通机载站可以将任务控制相关指令发送给综合任务管理系统,由综合任务管理系统转发至各个任务载荷(传感器),如光电、雷达等;同时从综合任务管理系统获取各个任务载荷工作状态、健康状态、任务载荷探测信息,如光电视频、SAR图像、目标数据等;
(4)地面卫通车:无人直升机卫通机载站通过卫星无线转发与地面卫通车通信,交互传输控制指令、无人直升机机载设备和任务载荷工作状态、任务载荷探测信息。
上述通信架构以飞行控制系统和综合任务管理系统为无人直升机的左脑和右脑,以无人直升机卫通机载站为信息汇总和传输通道,简洁高效、通用性强。通常无人直升机测控系统会保留原视距通信方式,当超出视距时采用卫通测控通信,两种通信方式互为补充、互为备份。
结论
本文在概述国内外直升机卫星通信研究的基础上,梳理了无人直升机卫星测控通信系统选型和装机设计流程,同时结合当前无人直升机常用机载架构,以飞行控制系统和综合任务管理系统为无人直升机的左脑和右脑,以无人直升机卫通机载站为信息汇总和传输通道,设计了一款简洁高效、通用性强的卫通机载站通信架构,可为无人直升机卫星测控通信工程实践提供借鉴。