无人作战飞机查证空飘物方法研究
2023-10-28李昭奕程文超齐萌熊世忠
李昭奕 程文超 齐萌 熊世忠
近年来,不明空飘物时常出现在我国边境地区上空,空飘物携带攻击性武器或者空飘物影响空域内航空器正常飞行,将对我国空域安全造成巨大威胁。因此,空飘物查证任务至关重要。空飘物的截面积通常很小,因此,地面雷達有时无法探测到空飘物。即便雷达可以探测到空飘物,受空飘物的雷达截面积过小的因素影响,雷达难以持续稳定地获取空飘物的位置信息。相较之下,航空侦察力量执行空飘物查证任务更加可靠且十分必要。当空中出现不明空飘物时,出动航空侦察力量实施抵进侦察,可以获取更加直观的影像信息,为进一步确定不明空飘物的处置措施提供可靠依据。
空飘物查证任务的特点
航空侦察力量对地面目标和海上目标的侦察,在侦察模型上,通常可简化为地、海面目标在二维平面内的运动。同时,地、海面目标周边多有特征明显的固定参照物,便于航空侦察力量快速锁定目标,实施持续稳定的跟踪监视。反观,空飘物周边缺乏固定参照物,且空飘物的运动受风的影响较大,空飘物的运动方向可能随时会发生改变,空飘物的三维运动轨迹难以准确推算。因此,空飘物查证任务难度较大。
无人作战飞机执行空飘物查证任务的优势和难点
无人作战飞机无需考虑飞行员对战场侦察环境和飞行时长的适应和接受能力,可在恶劣、复杂的环境中实施长时间的跟踪、侦察、监视行动。无人作战飞机搭载多型侦察载荷,可以根据战场环境,灵活选择使用高空CCD摄像机、高空红外行扫仪、多光谱相机、合成孔径雷达等任务载荷,有效减少不同天候对空飘物侦察效果的影响,同时地面情报人员可对多种成像方式获取的图像进行比对,有效提高目标识别的准确性和判读结果的可靠性。因此,无人作战飞机执行空飘物查证任务具有一定的优势。
但与此同时,无人机执行空飘物查证任务的难点也不容忽视。空飘物的雷达截面积相较于地面目标和海面目标通常更小,无人机发射激光直接射中空飘物的难度较大。即使无人机发射激光成功射中空飘物,但受空中气象因素影响,无人机仍无法对空飘物实施持续稳定跟踪,需通过战术不断优化无人机侦察航线,进而重新锁定目标。
无人作战飞机执行空飘物查证任务的作战流程
听令起飞,抵进侦察,圈定运动边界
无人机接到空中出现不明空飘物的雷情通报后,听令出动,前往目标区域执行空飘物查证任务。无人机即将抵达目标区域时,任务规划员实施临机规划,根据目标区域当前时刻的平均风速,绘制临时飞行航线,飞行操控员切换飞行航线,密切监控飞行数据,任务载荷监控员密切监控实时下传的侦察图像。
无人机抵达目标区域后,短时快速发现空飘物的概率较小。无人机抵达目标区域时,可重新获取雷情信息,任务规划员根据两次雷情信息,以及时间段内的风速风向信息,大致推算空飘物的运动轨迹,圈定侦察区域边界,进而缩小空飘物的搜索范围。
分级划定,往复侦察,锁定疑似目标
空飘物的运动轨迹随机性较大,任务规划员应按目标出现概率灵活规划航线,根据风速风向等数据,列出空飘物当前位置信息矩阵,导入地理信息系统,绘制出空飘物出现位置的概率点图,进而根据目标点的数量和密度,划分侦察区域,设定优先侦察等级。
飞行操控员切换侦察航线,控制无人作战飞机飞行,采用“光栅”或“扫雪”侦察航线,按照优先侦察次序,对出现目标的目标区域,实施往复侦察,直至发现疑似目标。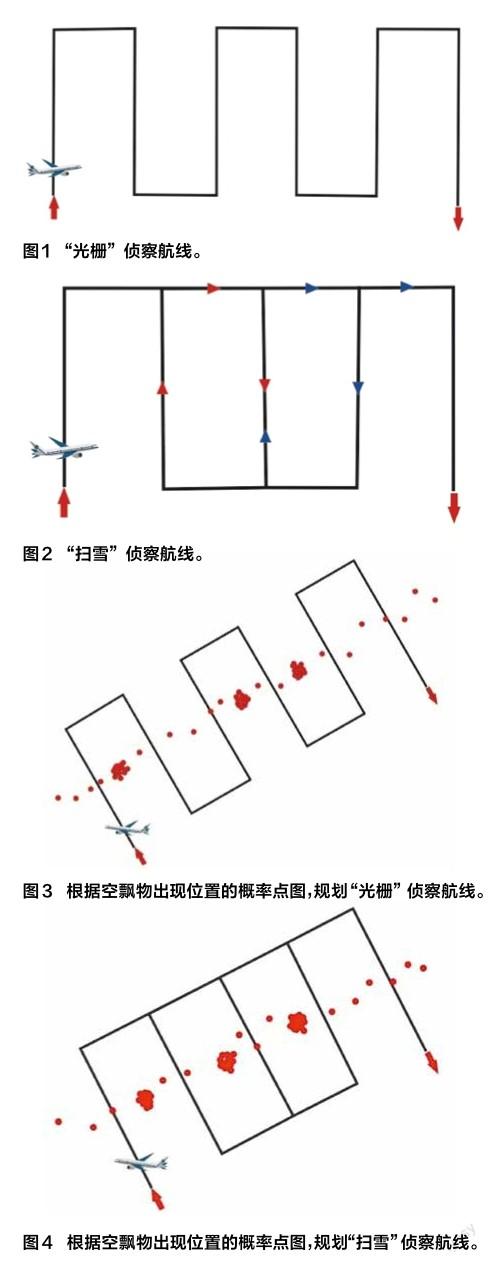
任务载荷监控员发现疑似目标时,快速锁定目标,发射激光,记录数据。此时,飞行操控员在确保飞行安全的前提下,切换至盘旋状态,确保持续稳定的监视目标。任务规划员统筹数据信息,根据雷达发现目标时间和目标位置信息、无人机锁定目标时间和目标位置信息,以及时间段内风速风向信息,大致推算空飘物的运动轨迹,进而圈定空飘物的运动范围。
盘旋侦察,获取位置,溯源查证目标
在搜索目标阶段,高空CCD侦察摄像机成像更为直观。无人机锁定目标后,任务载荷监控员通过“变倍”“调焦”等操作,使目标处于合适的视场中,便于目标识别和跟踪。在此特别要强调的是,因空飘物通常质量较小,空飘物在风的作用下,漂浮速度很快,极易“飘出”监控屏幕范围。无人机丢失目标后,扩大任务载荷视野,重新锁定目标的难度仍旧较大。因此,空飘物目标切不可缩至过小,设置适宜的任务载荷的倍率,使目标处于合适的视场中,对无人机实施持续稳定的跟踪监视至关重要。
无人机实现持续稳定跟踪监视后,情报人员进行识别研判。若情报人员判定为预定空飘物目标无误,则无人机继续实施跟踪监视。若判定目标有误,则无人机再次实施往复侦察,直至搜寻到目标。
情报人员确定当前无人机锁定的目标为预定目标后,任务规划员根据当前时刻空飘物航向、无人机平台高低角和当前飞行高度,估算预定盘旋位置,确定临时航点并实时规划航线,使无人机的临时飞行航线与目标保持基本平行,进而抵消或减小一个维度的变量影响。无人机抵达预定位置后实施盘旋侦察,无人机采取激光测距的方式,计算空飘物当前位置坐标,任务规划员根据当前时刻空飘物的位置坐标和相关气象信息,反向推算空飘物的飞行航迹和释放源位置,任务规划员重新规划溯源查证航线,无人机执行溯源查证任务。
结束语
随着科技发展,航空爱好者越来越多。小型航空器的无序航行,对空中交通管制、防空安全构成了现实威胁。因此,空飘物查证也成为国内重要城市面临的长久问题。本文对空飘物活动规律进行了模型化假设,总结了空飘物在空活动的规律,结合空飘物查证任务的特点和无人机执行空中查证任务的优势,提出了无人作战飞机执行空飘物查证任务的作战流程。
虽然无人机在执行空飘物搜索查证任务上具备一定的优点,但受无人机飞行速度和任务规划等因素限制,无人机的航行速度总体远低于大部分有人机,任务时长相对较长,空飘物在短时内运动距离就相对较大,因而无人机空飘物执行空飘物搜索查证任务,存在时延问题。但有人机相对无人机油耗较大,出动有人机执行空飘物搜索查证任务,效费比偏低。相对而言,无人机执行空飘物搜索查证任务更为经济。
目前,航空侦察力量执行侦察任务,更多的是执行查证地、海面目标任务,空中小目标查证任务需求较小。我国边界空域出现大型军用航空装备时,通常出动战斗机伴飞劝返。在此可以假想,未来可针对空中目标查证任务,研发一款低油耗、高性价比的侦察无人机,执行全天时空中目标侦察任务,从而缩短航空侦察力量升空到达时间。