无人作战飞机海域舰船目标侦察方法研究
2023-10-28李昭奕刘嘉驹刘念杨鹏辉
李昭奕 刘嘉驹 刘念 杨鹏辉
当前,各国在研及列装的无人作战飞机多采用预先规划和临机规划相结合的任务规划模式。无人机执行任务前,任务规划员预先规划飞行航线。无人机执行任务过程中,任务规划员根据战场环境信息实时调整飞行航线。当前世界各军事强国聚力发展高自主性的无人作战飞机,但受机器学习和人工智能等技术发展限制,目前高自主性的无人作战飞机仍停留在概念机阶段。基于当前无人机装备实际运用的技术实际考虑,半自主模式的预先规划与实时规划相结合的方式,对提升无人作战飞机的作战能力具有重要现实价值。
无人作战飞机海上广域侦察
无人机搭载合成孔径雷达在海上进行侦察,可以获取到舰船的遥感图像。无人机获取海上遥感图像的过程为:指挥控制中心发送舰船位置信息至地面指挥控制站,地面指挥控制站通过上行链路发送飞行控制信号至无人机红外遥感图像摄像平台,无人机将获取的图像、视频和GPS定位信息经下行链路传送回地面指挥控制站,地面指挥控制站将图像、视频、GPS定位信息传送给指挥控制中心,指挥控制中心的判读人员对比舰船目标信息对遥感图像进行判读。无人机航拍得到的舰船遥感图像清晰度高、比例尺度大、空间信息丰富,有利于舰船目标的识别。但小型海岛等与舰船相似的目标会对识别工作造成干扰。
无人机遂行作战任务时,要结合任务和目标特点,精心选择载荷,灵活运用各种战法。无人机通常配备多种载荷,针对不同的侦察目标,选择合适的载荷,能获取更高质量的目标图像。面对不同的战场环境,选择合适的侦察方法,能够更大程度提升侦察效果。因此,按照“精选载荷,活用战法”的原则,需要熟悉各种载荷的战技性能指标和功能特点,根据任务类型选择最适合的载荷。例如,侦察监视某海域,则应选择广域侦察能力强的挂载设备。根据海上联合作战的作战指导、无人机作战能力、敌作战部署和作战目标,要针对性选取战法,并根据敌情变化灵活变换战法,争取作战主动权。
本文基于海上广域侦察特征,提出了“围棋”网格法,结合多源情报信息,划设侦察区域边界,推算目标可能出现的区域,突出侦察重点區域,提高了侦察搜索的时效性。采取棋格点位“盘旋”、棋盘“切点”跳圈侦察的方法,能够避免因敌活动舰船目标相对较小,无人机大角度机动易丢失目标,无法实现持续稳定跟踪监视,以及敌防空火力系统对我机构成威胁,确保了无人机的飞行安全。
预先规划,构建“棋盘”网格侦察航线
“大视场”任务区域全扫描,最快速度发现“可疑点”
战场侦搜范围大是海上舰船侦察任务的主要特征。全范围侦扫作战海域,并在最短时限内完成,是首要任务目标。无人机侦察载荷的侦照范围是重要限制条件。具体而言就是,在任务计划所设定的飞行高度下,无人机任务载荷侦照目标,任务载荷监控员通过指挥控制站监视实时下传显示的视频信息,任务载荷监控员能够清晰发现疑似目标的“小黑点”。无人机执行“盘旋”指令进行侦察,无人机任务载荷的倾斜侦察角度决定了侦照图像内容,无人机的盘旋半径也是决定侦照图像内容的关键影响因素。
先手布局,划定“棋盘”方格最小间距
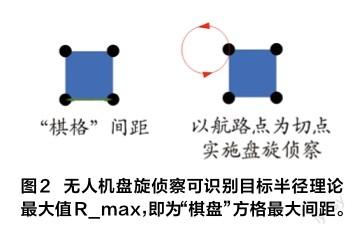
假设无人机处于“盘旋状态”,飞行高度为H,无人机倾斜角度为θ,无人机任务载荷设定最小焦距时,处于最大视场状态,此时在地面指挥控制站的监控画面中,可以清晰看到“小黑点”。据此,可以推算出无人机在“盘旋”状态下,发现目标的侦察半径理论最大值Rmax,即Rmax=H tan θmax,如图1所示。无人机执行作战任务,飞行安全是首要因素。假设无人机的最小转弯半径为R,第一种情况,若无人机在盘旋状态下,可发现目标的半径理论最大值Rmax小于无人机最小转弯半径R,无法保证无人机的飞行安全。在此情况下,为保证无人机的飞行安全,无人机盘旋侦察识别目标半径理论最大值Rmax,取值为无人机最小转弯半径R值,即令Rmax=R。第二种情况,若无人机在盘旋状态下,可发现目标的半径理论最大值Rmax大于或等于无人机最小转弯半径R,能够保证无人机的飞行安全,则无人机盘旋侦察识别目标半径理论最大值Rmax,取值理论计算值,即Rmax。本文划设“棋盘”方格,“棋盘”方格最大间距,即为无人机盘旋侦察可识别目标半径理论最大值Rmax,如图2所示。
圈“地”围域,划设侦察范围边界
首先,根据敌我双方攻守关系,结合海上探测预警雷达等多源情报信息综合研判,预判敌方舰船航行方向及最大可能性出现区域,采取主动出击、划设重点区域的方式。情况一:若敌方舰船意图抵进我方海域,并企图登陆我海岸线,则根据敌方舰船可能抵进侦察的最大范围,甚至敌方舰船抵进打击我方陆基兵力或基础设施的最远距离,划设为侦察范围边界。情况二:若我方舰船于近海或深蓝远海遂行海上任务,敌方舰船闯入我方雷达探测识别区,则根据我方舰船或编队的最小安全距离,划设为侦察范围边界。
横经纵纬,自内向外划设“棋盘”
划设侦察区域边界,对海上侦察任务区域进行栅格化处理。影响因素为最小侦察区域边界,以及无人机盘旋侦察可识别目标半径理论最大值R_max。具体过程为:多源情报信息综合研判结果为侦察区域中心位置点,自中心向边界展开,建立同间距网格点。实际作战运用中,依据战场环境信息经验,通常海上舰船目标出没于距陆地较远的海洋深处,一般周边存在大型海岛的可能性较小,但也在此提及,若舰船周边明显存在不必要划设为侦察区域,则可不再拘泥于矩形“棋盘”设定,在此仅为理想化假设。具体实施作战任务时,不可生搬硬套,应结合具体战场态势及地理环境信息做以取舍。本文总体思路为确保侦察区域全覆盖,在无人机确定高度的前提下,保证任务载荷可有效清晰识别监控图像中最小影像信息,图3为辅助侦察航路点“棋盘”概念图。
落“子”为棋,规划全域侦察航线
在预先规划中,可载入的任务规划航路点数量受数据存储限制。但基于前文思路,在确保侦察区域全覆盖的情况下,根据多源信息划设的网格,往往会过于密集,因而造成航路点数量过多。一方面,航路点可能由于数据存储限制,无法全部加载。另一方面,无人机在航行过程中,飞行操控席的监控屏幕上的态势点位过于密集,飞行操控员视觉上会产生额外负担和干扰,影响飞行操控员有效监控无人机的飞行状态,降低飞行的安全性。因此,建议采取四等分、八等分等切分方式,在任务航线中,仅输入侦察区域关键点位信息,确保飞行航线绝对精简,在无人机飞抵任务区域前,为飞行操控员提供态势参考。

具体过程为:任务前,加载“精简版”“棋盘”网格航线至任务航线,作以态势辅助;任务执行过程中,当无人机抵进侦察区域边界,加载“任务版”“棋盘”网格侦察航线,无人机抵进重点区域实施侦察,此时可结合多源情报信息,预判舰船航行方向,顺向搜索侦察。
实时规划,持续稳定跟踪监视舰船目标
综合多方情报信息,确定“火力威胁圈”
无人机抵进执行航空侦察任务,须首要保证无人机的飞行安全,进而确保无人机有效完成作战任务目标。任务过程中,无人机从侦察区域边界进入,沿预判舰船航行方向顺向搜寻,当发现疑似目标时,或者临近重点目标区域时,无人机需要立即调整飞行探测位置,及时切点“外跳”,确保无人机处于安全的侦察位置,随后无人机任务载荷对目标进行侦照,地面情报人员综合研判,判断目标是否为舰船,判断舰船所属国别、类型等基本信息,判断舰船上是否搭载防空武器、反无人机装备等火力装备,进而判断敌方的火力打击范围。
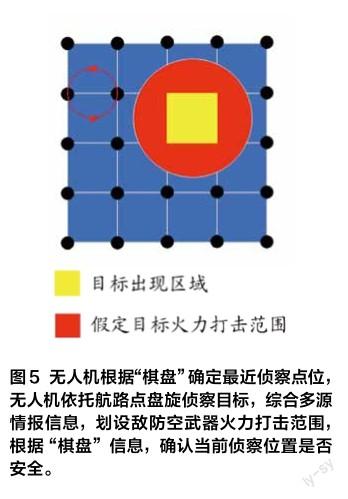
无人机根据“棋盘”信息,确定最近侦察点位,无人机依托航路点,盘旋侦察目标。综合多源情报信息,划设敌防空武器火力打击范围,根据“棋盘”信息,确认无人机当前侦察位置是否安全。飞行操控员操控无人机,快速做出反应动作,向“棋格”外圈机动,确保无人机飞行安全。
根据激光测距确定敌我位置距离,灵活机动确保安全
计算敌防空火力圈和无人机的相对距离,当无人机处于安全位置时,载荷监控员向舰船目标发射激光,测定无人机与舰船目标的直线距离,持续稳定跟踪监视敌方舰船目标,动态监控敌我位置距离,判断无人机当前是否存在安全威胁,适时采取机动“跳圈”方式应对。
切换“盘旋”点位,确保任务载荷平台画面稳定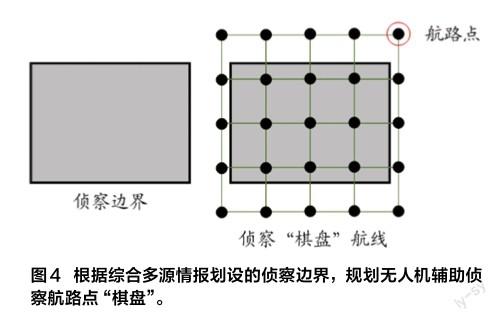
无人机飞行姿态无相对大角度机动,保证了无人机的飞行安全。同時保证了任务载荷平台获取到的实时监控画面,能够持续稳定锁定目标,将目标圈定在视线范围内。当前,无人机执行区域侦察任务,通常采取“直线往复侦察法”“光栅侦察法”以及“扫雪侦察法”。
基于上述三类侦察方法,采取压缩直线侦察距离的方式,即“压缩栅格高度”。根据栅格单向平移特征,相对目标距离会增大或减小,导致无人机逐渐远离或抵进目标。一是无人机的飞行安全可能出现风险,二是会导致监视画面中的目标图像“忽大忽小”,造成监控不稳定,甚至导致目标丢失。
目前,无人机执行跟踪监视任务,飞行操控手段通常采取“左盘旋”“右盘旋”“8字盘旋”等方式,无人机小角度盘旋,确保任务载荷平台画面相对稳定,目标图像大小变化较小,且目标可始终圈定在监控画面内。
棋盘“切点”侦察,确保持续稳定跟踪监视
无人机根据与敌舰船相对距离、敌防空打击范围等关键信息,采取“盘旋”侦察方式,对敌方舰船持续稳定跟踪监视,如图6所示。若敌舰船目标与我机距离不断增大,目标图像逐渐缩小,结合当前所处“棋盘”网格位置,综合分析周边网格情况,敌防空火力打击圈和最小侦察半径等限制因素,遴选最佳切换航路点。
实施规划平行敌舰船航行,临机调整“棋盘”
持续稳定监控敌方舰船目标一段时间后,可实施临机规划,规划平行于舰船航行方向的侦察航线,依据舰船当前概略位置划定威胁区,无人机与敌方舰船目标始终保持安全距离,无人机发现敌方舰船目标后,使用激光测距测定目标位置信息,对敌方舰船目标持续跟踪。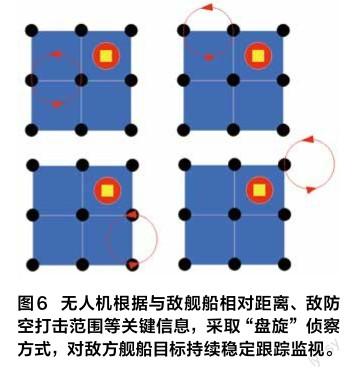
结束语
当前,海上广域侦察任务面临两大现实难题,一是海上任务区域广阔,正所谓“沧海一粟”,即便无人机侦察载荷平台切换至“大视场”模式,想要在茫茫大海上寻找相对微小的舰船目标,也需要大量的时间。通过“围棋”网格法,结合多源情报信息,划设侦察区域边界,预判中心区域,计算最大棋格间距,突出侦察重点,根据线索,有序搜寻,提高了侦察搜索的时效性。二是无人机高空状态下,敌方舰船目标相对较小,无人机大角度机动,采取“栅格法”侦察,易丢失目标,无法持续稳定跟踪监视目标,以及敌方舰船搭载防空火力系统,对我机构成安全威胁。采取依托棋格点位“盘旋”,棋盘“切点”跳圈侦察,确保安全,稳定追踪,有效监视。本文针对海上广域舰船目标侦察任务背景,提出的构建“棋盘”、切点侦察方法,对无人作战飞机海域作战运用具有重要实战意义,可为从事本专业人员提供参考思路。