电动垂直起降飞行器气动布局分析(三)
2023-10-28符长青
符长青
电池技术对电动垂直起降飞行器气动布局的影响
电动垂直起降飞行器(eVTOL)作为航空科技领域的一个全新概念,目前面临着系统复杂、涉及面广、关键技术多、难度大等一系列问题。要想取得全面突破,在加强相关基础研究工作的同时,对关键技术应进行专项研究和攻关,其中包括:高能量密度电池技术、氢燃料电池技术和动力系统综合优化技术等。这三项技术要求的内容,在进行电动垂直起降飞行器(eVTOL)气动布局时,属于优先考虑的重要因素之列。
高能量密度电池技术难点
当人们按照电动垂直起降飞行器(eVTOL)定义的基本要求,将电动系统作为主要的动力装置应用于其上时,会遇到一个非常棘手、而非电动机本身的问题,这就是为电动机提供能源的电池能量密度太低,比航空燃油的能量密度低十余倍。结果造成纯电型的电动垂直起降飞行器(eVTOL)在试飞和实际使用中,通常表现出重载动力不足、飞行时间短等缺点。
现以锂电池能量密度举例:大多数锂电池能量密度在170Wh/kg左右,少数比较先进的锂电池能量密度能超过该数值,例如比亚迪三元锂电池能量密度为219Wh/kg,宁德时代麒麟电池目前能量密度255Wh/kg。
对于电池能量密度对于eVTOL续航能力的影响,根据清华大学郝瀚副教授团队测算:
(1)当电池能量密度为200Wh/ kg时,eVTOL续航距离100km所需电池容量为70kWh,eVTOL续航距离 200km所需电池容量为537kWh。按照每度电5kg的重量,eVTOL续航距离200km需要重量为2.5t的电池,大大超出eVTOL载重能力。
(2)当电池能量密度提升至400Wh/kg时,eVTOL续航距离100km所需电池容量为44kWh;续航距离200km所需电池容量下降到94kWh(下降了80%以上)。因此,电池能量密度如果提升至400Wh/kg,eVTOL续航可达到300km;能量密度如果提升至600Wh/kg,eVTOL续航距离可达到400km。
但现实是:在当前锂离子电池化学体系下很难使能量密度超过255Wh/kg,就更不用说实现超过400Wh/kg的能量密度了。
氢燃料电池方案的可行性
相对于锂电方案,虽然氢燃料电池存在能量密度高、电池寿命长等优势,但在动态响应性及功率密度上存在一定不足(航空器通常要求1500W/kg的功率密度,而氢燃料电池系统仅仅只能达到600W/kg),因此长期来看,氢燃料搭配一部分锂电池储能是更优方案,锂电池可用于启动和提供快速变化的功率输出,氢燃料电池可用于巡航飞行中的能量输出。
动力系统综合优化技术
根据电动垂直起降飞行器(eVTOL)的定义,其动力系统并不是简单地将传统的燃油动力装置(航空发动机)换成电动装置。实际上,电动垂直起降飞行器的设计与传统燃油(航空发动机)飞行器的设计思路完全不同。由于电动垂直起降飞行器可以根据需要将大功率电机分解为多个小功率电机,这样做的好处是传统的集中动力形式变成按需配置的分布式动力形式,便于实现总体、气动、动力等最佳优化组合,从而获得总体的最佳收益。
分布式电推进(Distributed Electric Propulsion,DEP)的一个重要优点可将动力分散到电动垂直起降飞行器的各个主要结构上,并可改变机体周围的流场,提高气动性能,降低噪声水平。可以说,分布式电推进技术的出现,拓展了电动垂直起降飞行器设计的自由度,可大幅提高它的综合性能,但与此同时将带来多学科优化设计和计算分析的复杂性等难题。
需要指出的是,现有大部分电动垂直起降飞行器的气动布局基本上是对传统布局的改型或改进,较少依据电推进的特点,并进行多学科综合优化设计得到,因此并没有充分发挥分布式电推进的优点,这是需要引起人们重视和加以改进的地方。
电动垂直起降飞行器的座舱设计
航空器的类型
随着电动垂直起降飞行器概念的提出,目前世界上有三种不同类型的航空器:
(1)有人驾驶航空器。机上有人,要有人(飞行员)驾驶,如固定翼飞机和直升机。
(2)无人驾驶航空器。机上无人,没有飞行员和乘客,如固定翼无人机和旋翼无人机。
(3)电动垂直起降飞行器。机上有人(乘客),但机上没有飞行员,无人驾驶。
机上有人还是无人,对航空器的气动布局、总体结构设计和要求有很大的差别。在进行航空器气动布局和总体结构设计时,如果机上有人,首先要考虑的是机上人员的安全。虽然电动垂直起降飞行器与无人机一样,机上都不需要飞行员进行驾驶,但是它与无人机不同的是:电动垂直起降飞行器上有人(乘客),因而既要确保电动垂直起降飞行器飞行安全,又要满足乘客乘坐方便舒适的要求,即电动垂直起降飞行器的总体结构设计要在具有自主飞行能力的无人机基础上增加乘客座舱。
乘客座舱的作用
电动垂直起降飞行器的乘客座舱是机上乘客乘坐的场所。座舱除具有保护人体免受飞行过程中异常环境因素危害的作用外,在提供一定舒适条件方面也具有重要作用。乘客座舱作为电动垂直起降飞行器气动布局和总体结构设计中一个重要的组成部分,对其飞行安全和性能的发挥有着至关重要的作用。尤其是座舱内部装饰与乘客直接接触,会对乘客的视觉、心理和意识活动会产生一定的影响。
乘客座舱的整体布局直接决定了电动垂直起降飛行器的整体装饰效果和视觉感官,其中座舱设施的造型是整体座舱装饰设计的重要组成部分,包括座舱的天花板、玻璃窗户大小和透明度、行李箱隔板、座椅和安全带、舱门位置和开门转向等是座舱整体效果的具体体现。在进行电动垂直起降飞行器的乘客座舱设计时,不仅要注重座舱内部各系统功能的实用性,还要关注内部装饰的视觉感官性,良好的视觉感受可以使乘客在飞行过程中有一种宾至如归的亲切感。
乘客座舱设计与人体测量的关系
人体测量学以对人类大量个体各部位的测量、记录和描述为基础,研究人类个体发育、体质特征,进而通过测量所得到的各种数据资料,对个人与个人之间、群体与群体之间进行对比研究。在航空器气动布局和总体结构设计中,主要是综合考虑人体的形态结构、生理和身体素质之间的关系,将人体测量学的数据运用到乘客座舱设计中,包括座舱重心位置,座椅大小和距离位置安排等。
电动垂直起降飞行器气动布局的定义和特点
目前,电动垂直起降飞行器(eVTOL)的设计空间相当广阔,各国设计师们已经尝试或正在尝试许多不同的空气螺旋桨配置(气动布局)方案,至今已出现了600多个采用不同气动布局的设计方案,以满足电动垂直起降飞行器必须达到的各种技术和应用要求。因此,对电动垂直起降飞行器的气动布局深入进行分析研究,将有助于该行业从业人员比较深入地了解每种气动布局的优缺点,以及选择固定机翼和空气螺旋桨最佳复合配置的方法。
电动垂直起降飞行器研制流程
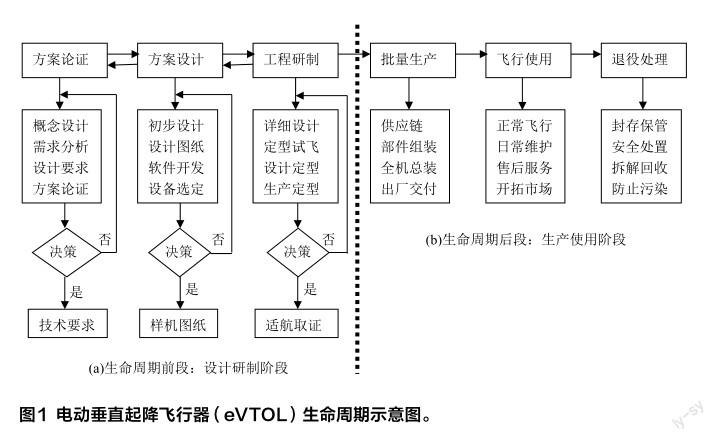
研制一种新型号的电动垂直起降飞行器,从设计方案的提出到试制、生产并投入市场使用,需要进行大量的科学研究、工程设计、分析计算、试验验证、工艺试制、飞控调试、软件开发、测试和试飞等工作。为了比较清晰地描述这个复杂过程,通常把电动垂直起降飞行器研制过程称为该项目的生命周期。
项目生命周期确定了项目的开端和结束,项目阶段的前后顺序是由项目生命周期确定的,在项目实施过程中,通常要求现阶段的工作成果经过验收合格后,才能开始下阶段工作。在实际工作中,站在不同的角度上来看,可将新型号电动垂直起降飞行器项目生命周期分为两个阶段,前一阶段为设计研制阶段,后一阶段为生产使用阶段,如图1所示。
电动垂直起降飞行器项目设计是指设计人员应用气动、结构、动力、材料、工艺、电子和计算机软硬件等学科知识,通过分析、综合和创造思维将设计要求转化为一组能完整描述电动垂直起降飞行器的参数(文档、图纸和软件)的活动过程,包括概念设计,初步设计和详细设计三部分。
电动垂直起降飞行器项目设计是一门应用科学,是各项先进的科学技术综合应用的结果,其内容涉及空气动力学、飞行动力学、结构动力学、气动弹性力学、动力系统、自动控制技术、计算机技术、自控软硬件以及制造工艺等多种学科和专业技术领域。由于在设计研制阶段要全面确定整个电动垂直起降飞行器新型号项目的产品策略、外观、结构、性能和功能等,从而确定整个生产系统的布局,因而,其项目设计的意义重大,具有“牵一发而动全局”的重要意义。
在电动垂直起降飞行器新型号项目设计研制阶段,首要的工作任务是设计确定其气动布局,它是整个项目设计研制工作能否成功的基础之一。
电动垂直起降飞行器气动布局的定义
航空器的空气动力布局(简称气动布局)是其主要空气动力部件的气动外形及相对位置的设计和安排,即航空器外部总体形态布局与位置安排。例如,固定翼无人机气动布局是指它的各翼面,如主翼、尾翼等是如何放置的;旋翼无人机气动布局是指它的旋翼系统(如单旋翼+尾桨或多个旋翼)是如何放置的;复合式无人机气动布局是指它的固定机翼与旋翼系统是如何组合安置在一起的。
航空器的气动布局同它的外形构造、动态特性及所受到的空氣动力密切相关,关系到航空器的飞行特征、飞行性能、稳定性和机动性。至于航空器的动力系统、机载设备及任务载荷等放置在哪里的问题,则笼统地称为航空器的总体布局。虽然总体布局对航空器的飞行性能也会有一定的影响,但是起决定作用的主要是它的气动布局,因为只有气动布局才能够最直接地决定航空器的基础形态。掌握了气动布局的种类,人们就能够将航空器进行简要归类梳理。由于电动垂直起降飞行器在空气动力和自动驾驶方面与无人机产品更为接近,因此成熟的无人机技术可以为其提供更多的参考。
常见的无人机气动布局主要有4种类型:固定翼无人机、无人直升机、多旋翼无人机和复合无人机。以往,大中型固定翼无人机和无人直升机都很少采用电动机作为其动力系统,原因是蓄电池电池能量密度太低,比航空燃油的能量密度低十余倍。由于蓄电池重量太重,因而在人类100多年的航空发展史上,除了个别科研实验外,一直都没有在大中型固定翼飞机(有人驾驶或无人驾驶)及大中型直升机(有人驾驶或无人驾驶)上广泛使用电动机作为动力系统,几乎全部都是使用燃油航空发动机作为动力装置。
那么现在为什么电动机可以成功地用在多旋翼无人机和复合无人机上呢?主要是利用了电动机功率具有与尺寸无关的特性,即一个大功率电机系统分解为多个小功率电机后,整个系统的功率密度、效率和重量基本保持不变。这样就可以采取多个小电机驱动多个小螺旋桨的办法,使加起来的总功率达到系统功率要求。由此可见,在进行电动垂直起降飞行器气动布局时,需要借鉴和参考多旋翼无人机和复合无人机两种类型。
(1)多旋翼无人机与多旋翼电动起降飞行器的关系。多旋翼无人机是由多个旋翼(至少4个)在空中旋转获得升力的无人机。其特点是在整个飞行过程中,全机重量自始至终主要由旋翼系统承担,具有垂直起降、空中悬停、结构简单以及性价比高等优势,缺点是载重小、航程近、航时短等。多旋翼电动起降飞行器实质上是在电动多旋翼无人机的基础上,增加安装适合人员乘坐的座舱、座椅和相关设备所构成的一种全新的载人航空器。
(2)复合无人机与复合电动起降飞行器的关系。采用固定翼无人机与旋翼无人机相结合的复合式气动布局,即在固定翼无人机的基础上,安装上能够产生抵消全机重量的升力螺旋桨系统。目的是为了兼具固定翼无人机航时长、速度快、航程远的特点及旋翼无人机垂直起降、空中悬停的功能。它与多旋翼无人机的主要区别在于:在整个飞行过程中,全机重量分阶段由旋翼系统和固定机翼分别承担,或共同承担。复合电动起降飞行器实质上是在电动复合无人机的基础上,增加安装适合人员乘坐的座舱、座椅和相关设备所构成的一种全新的载人航空器。
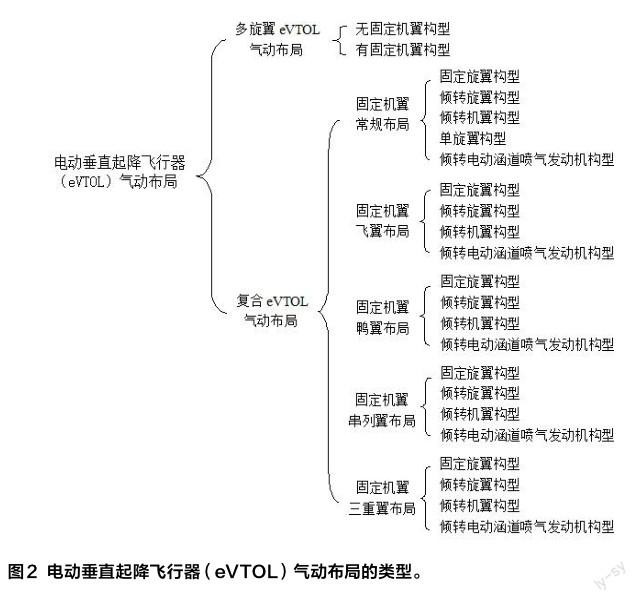
目前,全世界电动垂直起降飞行器600多个设计方案中所包含的气动布局虽然有很多种类且都有它们各自的优缺点,但是它们都是从固定翼无人机和旋翼无人机这两种最基本的气动布局衍生或组合出来的。可以将它们的气动布局归结为两大类:多旋翼eVTOL类型和复合eVTOL类型(如图2所示),其中后者是在固定翼无人机上加装升力旋翼系统后复合而成,具有明显的杂交优势。据统计资料显示,目前600多个设计方案中,大约30%采用多旋翼气动布局,70%采用复合气动布局。
大多数多旋翼电动垂直起降飞行器的气动布局都没有固定机翼,只是有少数加装了固定机翼。由于后者没有安装可用来提供向前飞行所需推力的推力螺旋桨,又没有采用顷转旋翼或顷转机翼等技术手段提供前飞所需的推力,因此固定机翼不能承载复合eVTOL的高效飞行模式,不能在巡航飞行阶段独自承担eVTOL的全部重量,只是在前飞过程中为升力螺旋桨系统分担一些机体重量。因此,其气动布局实质还是多旋翼eVTOL类,不能视为复合eVTOL类。
在复合电动垂直起降飞行器上安装的空气螺旋桨(旋翼)系统,按其结构划分有开放螺旋桨(旋翼)和涵道风扇两种;按其工作内容划分有两大类:升力旋翼和推力(或拉力)旋翼,其中升力旋翼是指旋翼平面可以是水平的,工作时能产生向上的升力,以承担复合电动垂直起降飞行器的重量,保持其在空中悬停或向上飞行姿态;推力(或拉力)旋翼(螺旋桨)是指旋翼平面可以是竖直的,工作时能产生向前的推力(或拉力),以克服复合电动垂直起降飞行器向前飞行时的气动阻力,保持其在空中向前飞行姿态,进行巡航飞行。
众所周知,固定翼无人机只有推力旋翼(空气螺旋桨安装在机体后面)或拉力旋翼(空气螺旋桨安装在机体前面),没有升力旋翼系统,飞行时所需的升力全部由固定机翼产生,因此它必须采取地面滑跑或外力助推的方法才能起飞;旋翼无人机包括多旋翼无人机和无人直升机两大类,都只有升力旋翼系统,没有推力(或拉力)旋翼(螺旋桨),也没有固定机翼,飞行时所需向上的升力和向前(向后、向左、向右)的推力都是由同一个升力旋翼系统提供。总共只有1个或2个旋翼的无人机称为无人直升机;总共有4个或4个以上旋翼的无人机称为多旋翼无人机。
“固定旋翼构型”是指升力旋翼系统安装在机身或机翼上的位置和指向是固定的;“倾转旋翼构型”是指升力旋翼系统相对于机翼平面是可以转动的;“倾转机翼构型”是指升力旋翼固定安装在机翼上,可随着机翼转动;“单旋翼构型”是指只安装了一个升力旋翼(开放螺旋桨)系统;“倾转电动涵道喷气发动机构型”是指安装在机翼上的电动涵道喷气发动机相对于机翼平面是可以转动的。
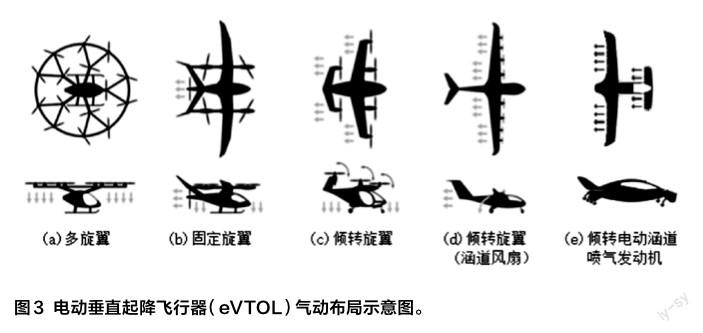
常见的几种电动垂直起降飞行器气动布局示意图如图3所示。其中除了图3(a)为多旋翼气动布局以外,其他的都属于复合eVTOL的气动布局。图3(b)为复合eVTOL常规气动布局的固定旋翼构型,图3(c)和3(d)都采用常规气动布局的倾转旋翼构型,但是它们采用的旋翼系统类型不一样,图3(c)中采用的是开放旋翼系统,图3(d)中采用的是涵道风扇系统。图3(e)表示复合eVTOL串列翼气动布局的倾转电动涵道喷气发动机构型,其电动涵道喷气发动机采用涵道电动矢量推力(DEVT)技术,安装在固定机翼上电动涵道喷气发动机是可以倾转的。
有一点需要说明的是:在有些文献中,把倾转旋翼(螺旋桨)和倾转机翼的电动垂直起降飞行器(eVTOL)划归为同一个类型,取名为“矢量推力”类。
电动垂直起降飞行器气动布局的特点
电动垂直起降飞行器以其低碳环保、噪声低、自动化等级高、运行成本低、高安全性和高可靠性被看作是最具发展前景的航空器产品。在它的设计过程中要解决的首要问题是如何进行气动布局,即如何通过先进的气动布局设计方案来获得它所需要的升力、减小阻力和提高飞行速度。这就要从理论上和在实践中研究电动垂直起降飞行器在飞行中与空气之间进行相对运动时,空气动力(飞行作用力)产生的机理及其规律,以及参考现有各种类型无人机的气动布局,并在其基础上进行策划、创新和再布局。
一方面,与固定翼无人机和无人直升机相比较,电动垂直起降飞行器(除了在起降与巡航飞行状态之间的转换阶段有比较复杂气动特性外,由于电动垂直起降飞行器普遍采用分布式动力(Distributed Electric Propulsion,DEP)系統,因此动力系统对它的气流分布和气动力的影响更加复杂。另外,电动垂直起降飞行器作为一种新型的航空器,大多气动布局和总体构型新颖,且各种构型之间的差异较大,因此对以往设计制造有人驾驶固定翼飞机和直升机的经验数据依赖程度比较低。
另一方面,根据电动垂直起降飞行器本身的结构特点,现有的大部分无人机的空气动力学理论可应用到电动垂直起降飞行器上。不过由于大多数无人机尺寸小,也没有在机内安装人员(乘客)坐椅和其他保障人员飞行安全的设施,安全风险系数小,一旦发生飞行意外,除了无人机无法回收外,不存在人员安全的风险。而作为载客运输用的电动垂直起降飞行器则不同,其飞行安全是重中之重,保证机上人员的飞行安全是最重要、最基本的要求。所以eVTOL不能完全照抄无人机的气动布局方案,而应当重视和解决它自身特有的空气动力学问题,特别是在飞行过程中会遇到一些新问题,因此其气动布局设计首先要在众多的相互矛盾的需求之间进行较好的折中。表1给出了电动垂直起降飞行器各种类型气动布局特点的比较,包含了布局安排、飞行原理、能量效率、结构特点和性能特点等方面的对比。
除了表1列出的一些特点以外,大多数电动垂直起降飞行器都会遇到小雷诺数空气动力学问题,这是其重要的空气动力特点之一。过去这方面的研究比较少,现在进行气动布局设计时,它是一个绕不过去的坎,必须引起足够的重视并认真地解决它。
电动垂直起降飞行器不同构型的悬停性能对比
电动垂直起降飞行器與无人直升机在结构和飞行原理方面既有一些相同之处,也有许多不同的地方。现在正在研制的电动垂直起降飞行器试飞测试的结果表明:无人直升机的悬停升力效率最高。因为悬停升力效率与桨盘载荷(旋翼拉力与桨盘面积的比值)相关,桨盘载荷越小,悬停升力效率越高,如图4所示。电动垂直起降飞行器(eVTOL)中固定旋翼和倾转旋翼这两种构型悬停升力效率最高,但比无人直升机低不少;倾转机翼构型的悬停升力效率次之,倾转涵道风扇的悬停升力效率再次之,倾转电动涵道喷气发动机的悬停升力效率最低,排在最后。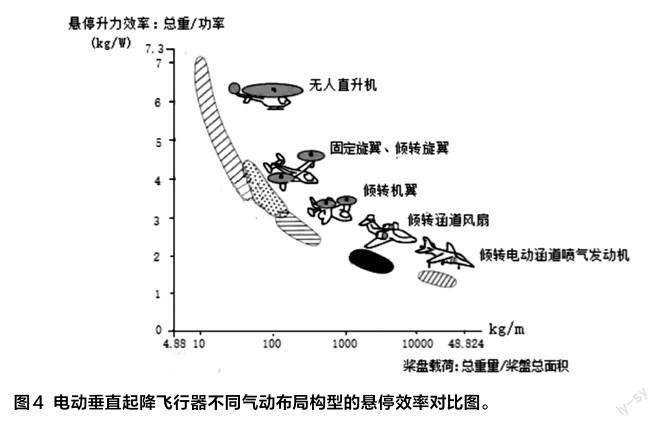
虽然无人直升机的悬停升力效率最高,但是它与电动垂直起降飞行器相比较,缺点是速度慢、振动大、噪声高、使用成本高等。这是否意味着将来无人直升机会被电动垂直起降飞行器所完全取代呢?答案是:不会。因为无人直升机优异的悬停升力效率是其他航空器所无法企及的,使其能够胜任包括eVTOL在内的许多其他类型飞行器无法完成的任务。只不过,无人直升机今后的发展方向需要在降低振动和噪声水平,降低使用和维护成本等方面加以改进。
多旋翼电动垂直起降飞行器气动布局分析及案例
多旋翼电动垂直起降飞行器气动布局分析
多旋翼电动起降飞行器实质上是在电动多旋翼无人机的基础上,增加安装了适合人员乘坐的座舱、座椅和相关设备所构成的一种全新的载人航空器。多旋翼电动垂直起降飞行器的总体结构由多个旋翼、机体、座舱、起落装置和动力装置(电动机)5个主要部分组成,如图5所示。
(1)旋翼。机翼的主要功用是产生升力,以支持多旋翼电动垂直起降飞行器在空中飞行,同时也起到稳定和操控作用。
(2)机体。机体的主要功用是将多旋翼电动垂直起降飞行器所有部件连接组合成一个整体。
(3)座舱。座舱的主要功用是供乘员乘坐、装载货物和各种设备。
(4)起落架。起落架是指多旋翼电动垂直起降飞行器在地面停放和起飞着陆时用于支撑其重力,承受相应载荷的装置。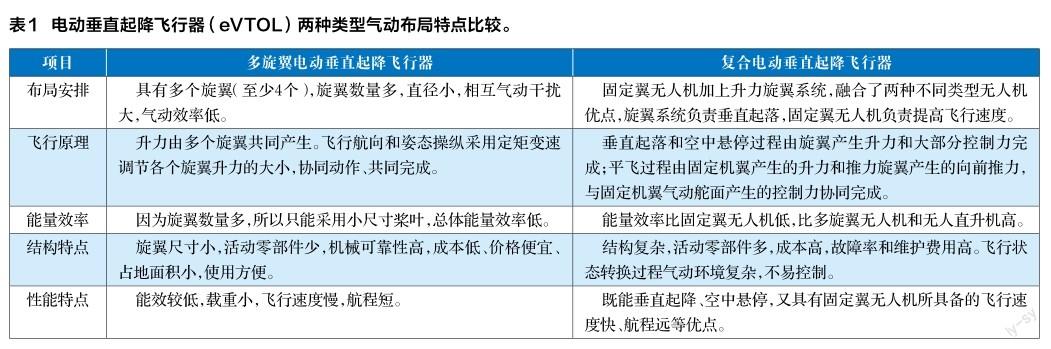
(5)电动机。电动机是多旋翼电动垂直起降飞行器的动力装置。
(6)电池。电池是为电动机提供能源的储能设备。
多旋翼电动垂直起降飞行器采用旋翼旋转变速或桨叶变总距(无周期变距)的方式改变旋翼升力的大小,因而取消了传统无人直升机操纵系统中必不可少的自动倾斜器,从而大大简化了总体结构,提高了机械可靠性,降低了成本。
多旋翼电动垂直起降飞行器的气动布局多种多样,主要是受其旋翼数量和位置所决定的,通常有以下几种类型,如图6所示。
(1)以旋翼数量划分。根据多旋翼电动垂直起降飞行器所具有的旋翼数量可分为4、6、8、12、16、18、24、36……旋翼等多种类型。不同的旋翼数量的气动布局,其飞行性能也各具特色,其中四旋翼电动垂直起降飞行器的结构简单,机动性很好;六旋翼、八旋翼电动垂直起降飞行器则稳定性更好;其他旋翼数量的气动布局也深受需求各异的用户喜爱。
(2)以旋翼分布位置划分。根据最前与最后两个旋翼轴的连线与机体前进方向是否在同一直线上,可划分为“I”型(或称为“+”型)和“X”型两种。如果连线与前进方向是在同一直线上,多旋翼电动垂直起降飞行器呈“I”型,否则呈“X”型。由于“X”型结构的实用载荷前方的视野比“I”型的更加开阔,所以在实际应用中,多旋翼电动垂直起降飞行器大多采用“X”型外形结构。除了这两种类型以外,还有其他类型的结构外形,包括“V”型,“Y”型和“IY”型等。
(3)以共轴电动机数量划分。为了在不增大体积的情况下使多旋翼电动垂直起降飞行器的总功率更大,最简单的办法是把两台电动机上下叠放。上下两台电动机分别驱动两个大小相同、转向相反的旋翼转动,使它们产生的反扭矩相互抵消,其气动布局包括IY型共轴双桨三轴六旋翼,Y型共轴双桨三轴六旋翼,V型共轴双桨四轴八旋翼等类型。这种气动布局虽然能节省空间,但由于上下叠放的两个旋翼之间存在着较大的空气动力干扰,会导致有用功率下降20%。
多旋翼电动垂直起降飞行器的飞行操纵方式
多旋翼电动垂直起降飞行器飞行操纵方式与传统的无人直升机不一样,它没有自动倾斜器。下面以四旋翼eVTOL为例,说明多旋翼eVTOL的操纵方式。
四旋翼电动垂直起降飞行器是通过协调改变各旋翼升力的大小来实现姿态控制的,需要对旋翼旋转转速或总距进行精准的同步调制,它是一个不稳定系统,也是欠驱动系统。欠驱动系统是指系统的独立控制变量个数小于系统自由度个数的一类非线性系统,在节约能量、降低造价、减轻重量、增强系统灵活度等方面都比完整驱动系统优越。欠驱动系统结构简单,便于进行整体的动力学分析和试验,同时由于系统的高度非线性、多目标控制要求及控制量受限等原因,欠驱动系统又足够复杂。
四旋翼电动垂直起降飞行器(eVTOL)的旋翼桨叶只能产生向上的升力,不能产生向下的推力,所以它不稳定,很难控制好,万一飞行器翻过来之后基本没办法控制回来,就坠机了。历史的经验证明:四旋翼飞行器的非线性、欠驱动系统结构让人手来控制难度实在太高,只能用自动控制器来控制飞行姿态才能解决问题。
如图7所示,四旋翼电动垂直起降飞行器有4个处于同一高度平面旋转的旋翼,前后旋翼(1和3)顺时针方向旋转,左右旋翼(2和4)逆时针方向旋转。由位于2个轴向的旋翼反方向旋转方式抵消彼此扭矩,从而使四旋翼电动垂直起降飞行器能在空中保持飞行预定方向或悬停不动。四旋翼电动垂直起降飞行器在空中飞行时有6个自由度,它们分别是沿3个坐标轴作平移和旋转动作。沿x轴正方向运动称为向前运动,垂直于旋翼运动平面的箭头向上表示此旋翼升力提高,向下表示此旋翼升力下降,没有箭头表示升力不变。
(1)垂直运动。当同时增加或减小四个旋翼的升力时,四旋翼电动垂直起降飞行器便会垂直上升或下降;当四旋翼产生的升力等于机体的自重时,四旋翼电动垂直起降飞行器便保持悬停状态(图7a)。
(2)俯仰运动。改变旋翼1和旋翼3的升力,保持旋翼2和旋翼4的升力不变。产生的不平衡力矩使机身绕y轴旋转,实现四旋翼eVTOL的俯仰运动(图7b)。
(3)滚转运动。改变旋翼2和旋翼4的升力,保持旋翼1和旋翼3的升力不变,产生的不平衡力矩使机身绕x轴旋转,实现四旋翼eVTOL的滚转运动(图7c)。
(4)偏航运动。当旋翼1和旋翼3的升力增大,旋翼2和旋翼4的升力下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现四旋翼eVTOL的偏航运动(图7d)。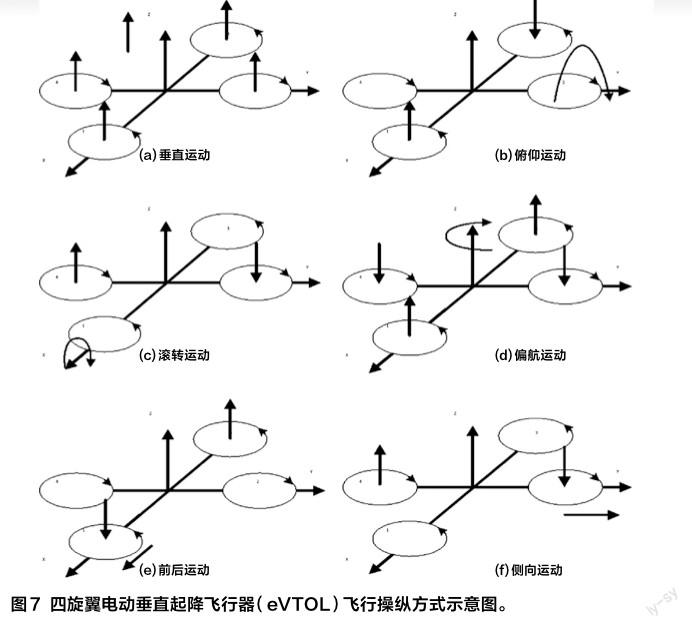
(5)前后运动。改变旋翼3和旋翼1的升力,同时保持其它两个旋翼升力不变,四旋翼电动垂直起降飞行器首先发生一定程度的倾斜,从而使旋翼升力产生水平分量,实现四旋翼eVTOL的向前和向后运动(图7e)。
(6)侧向运动。由于结构对称,侧向飞行的工作原理与前后运动完全一样(图7f)。(未完待续)
