公路平面线形指标恢复方法对比研究
2023-10-27李璇瞿伟斌寿任祯马兆有王晓玉
李璇, 瞿伟斌, 寿任祯, 马兆有, 王晓玉
(1.公安部交通管理科学研究所, 江苏 无锡 214151;2.山东省交通规划设计院集团有限公司, 山东 济南 250101)
公路平面线形指标恢复在公路改扩建、交通事故路段安全性鉴定中应用较多。从工程实践和研究情况来看,当设计图已知,即平面线形中直缓点、缓圆点、圆缓点、缓直点等特征点位置明确时,通过实测道路中线平面坐标,采用数值分析、软件辅助等方法恢复得到的路段平面线形指标差异不大且足够精确。张航等以某S形曲线(圆曲线半径R1=330 m)路段为例,分别采用拉格朗日插值法、最小二乘拟合法、三次样条插值法、纬地软件拟合法进行分析,依次得到R1=331.55 m、R1=330.03 m、R1=330.25 m、R1=331.99 m,误差分别为0.470%、0.009%、0.076%、0.603%[1]。
因公路设计时间久远、原始设计图丢失,根据测量坐标难以判断特征点位置,须研究如何恢复公路平面线形指标。部分学者采用“先直线、圆曲线,后缓和曲线”的思路恢复公路平面线形指标,如杨轸等采用最小二乘法拟合直线,根据三点确定唯一圆原理计算若干圆心坐标,采用重心计算公式求解平均圆心坐标,若干测量坐标与平均圆心坐标的距离即为圆曲线拟合半径,该方法对坐标测量误差的容忍度高,拟合效果好且计算简便[2-3];张航等将测量所得公路中线平面坐标导入CAD,人工判断特征点位置并划分恢复线元的区间,采用三次样条插值法计算各区段的线形指标,该方法在测量精度较小时适用性好[4]。但上述方法没有回答“哪些测量点纳入直线坐标拟合,哪些测量点纳入圆曲线坐标计算”,确定特征点位置的主观性较强且相关人员须具备公路路线设计经验。为规避这一问题,邬镇伦等直接采用三次样条函数对公路设计中线平面点云坐标进行插值[5],求得各测量点处的曲率,根据曲率变化确定线元属性[6],其中圆曲线半径取对应线元范围内各点半径的均值,缓和曲线参数采用黄金分割优选法求得[7]。张志伟等将公路平面线形恢复分为两个步骤,第一步采用三次B样条函数对公路设计中线测量坐标进行插值,求出各测量点的曲率,并根据曲率变化划分线元(直线、缓和曲线、圆曲线);第二步采用最小二乘法拟合直线和圆曲线参数[8-9]。Easa S. M.等通过卫星地图提取道路平面线形要素[10]。Li Z. X.等以曲线识别为基础识别线形单元,利用线形单元特性进行拟合[11]。Ai C. B.等提出基于GPS数据的道路线形识别和线形要素测设方法[12]。Ding J. J.等提出基于MATLAB和CAD平台的道路线形拟合方法[13]。
既有平面线形恢复方法总体上包括插值、拟合等数值分析法和软件计算法两大类,在实际应用中指导性强,但对不同测量偏差数据源的线形指标恢复方法研究较少。此外,插值法应用场景描述不够明确,拟合法也需首先由人工判断圆曲线、直线的大致范围。为此,本文基于理想道路中线平面坐标数据及实测道路中线平面坐标数据,研究三次样条插值法、最小二乘拟合法、纬地智能布线法的适用性和稳定性,同时提出无须人工判断线元属性的等距分组最小二乘拟合圆曲线法,为完善既有公路平面线形恢复方法理论体系及公路改扩建、事故路段安全性鉴定等提供理论支撑。
1 公路平面线形恢复方法
1.1 三次样条插值法
公路平面线形由直线、缓和曲线、圆曲线3种单元顺适衔接而成,采用插值法恢复平面线形时,插值函数应具有光滑性、凹凸性和精确性,分段低次多项式插值可提高插值精度并避免龙格现象,其中三次样条插值法是恢复公路平面线形的有效方法[4]。
三次样条插值法是在每两点之间构造三次函数,使各分段函数之间二阶及以下导数连续,确保各点之间光滑衔接。假设在区间[a,b]上有n+1个样本点,即[a,b]区间划分为n个区间(x0,x1),(x1,x2),…,(xn-1,xn),其中两个端点x0=a,xn=b,则三次样条插值函数S(x)为:
每个区间有4个未知数,共有n个区间。建立插值函数的条件如下:1) 一阶导数连续。除两端点外,其余n-1个内部点一阶导数连续,即左右两个三次函数一阶导数值相同。2) 二阶导数连续。除两端点外,其余n-1个内部点二阶导数连续,即左右两个三次函数二阶导数值相同。3) 每个样本点处连续。除两端点外,其余n-1个内部点连续,即左右两个三次函数值相同。4) 自然边界条件。两个端点处二阶导数为零。
曲率半径k大于10 000 m时,路段为直线;k接近某一定值R时,路段为圆曲线;R≤k≤10 000 m时,路段为缓和曲线[1]。
1.2 最小二乘拟合法
公路平面线形由直线、缓和曲线、圆曲线组成,从测量数据绘制的散点图很难直接判断特征点的位置,而且缓和曲线拟合较困难。为此,提出等距分组最小二乘拟合圆曲线法:将所有线元视作半径不同的圆曲线,依次选择若干数量的坐标点连续拟合圆曲线,根据半径变化规律判断线元属性,规避首先由人工判断直线、圆曲线范围的步骤。圆曲线拟合方程为:
R2=x2-2Ax+A2+y2-2By+B2
令a=-2A,b=-2B,c=A2+B2-R2,圆曲线拟合方程变为:
x2+y2+ax+by+c=0
令目标函数Q最小,分别对a、b、c求偏导数:
令:
D=N∑xiyi-∑xi∑yi
解得:
1.3 纬地平面智能布线法
纬地三维道路设计软件具有智能布线功能,步骤如下:1) 将公路中线上测量的若干平面坐标点导入CAD。2) 打开纬地设计功能→智能布线→点击“hpmnh”命令图标。3) 选择全部坐标点对象。4) 输出拟合报告和拟合路线。
2 基于理想坐标及实测坐标的平面线形指标恢复
2.1 路段数据
某二级省道干线公路的设计速度为80 km/h。选取前后800 m范围的某处弯道路段,该路段平曲线参数设计值见表1。

表1 某路段平曲线参数设计值
2.2 基于理想坐标的平面线形指标恢复
理想坐标数据是指平面坐标均严格落在道路中线上,由公路逐桩坐标表获取。以坐标测量密度1处/(10 m)为例,将该路段的中线坐标导入CAD绘制散点图(见图1)。
图1 分析路段中线坐标散点图
2.2.1 三次样条插值法恢复
采用三次样条插值法恢复路段平面线形指标,以坐标测量密度1处/(10 m)为例,共计79个坐标点。对78个区间进行三次样条插值,计算得到每个坐标点对应的曲率半径,根据曲率半径变化判断线元属性(见表2)。

表2 三次样条插值法所得路段各点曲率半径
根据表2,坐标点32~56之间为圆曲线,半径为449.56 m。选用CAD辅助计算缓和曲线长度,将坐标点24~32导入CAD,用样条曲线依次连接,测量得到缓和曲线1的长度为80.03 m。同理,测量得到缓和曲线2的长度为85.01 m。依次计算不同坐标测量密度下平曲线线元参数,结果见表3。

表3 基于三次样条插值法的不同坐标测量密度下平曲线参数恢复
2.2.2 最小二乘拟合法恢复
采用最小二乘拟合法恢复路段平面线形指标,以坐标测量密度1处/(10 m)为例,共计79个坐标点。将该路段视为由不同半径圆曲线组成的曲线,以20个点为一组,依次按照圆曲线方程拟合,计算得到每条圆曲线的半径,根据半径变化判断线元属性(见表4)。

表4 基于最小二乘拟合法的系列圆半径
根据圆曲线半径的变化,以坐标点5~24拟合结果为界限,对应的圆曲线半径减少幅度较大,认为坐标点24是直线和缓和曲线的临界点。综合计算结果来看,圆曲线半径在450 m左右,圆曲线半径拟合值为450 m左右时对应的坐标点为30~49,认为坐标点30是缓和曲线和圆曲线的临界点。同理,依次确定各线元范围并计算长度,其中缓和曲线长度采用CAD辅助计算。
依次计算不同坐标测量密度下路段平曲线线元参数,随坐标测量密度的增加,选取的每组拟合点数量逐渐减少。计算结果见表5。

表5 基于最小二乘拟合法的不同坐标测量密度下平曲线参数恢复
2.2.3 纬地平面智能布线法恢复
在纬地三维道路设计软件中恢复平面线形,坐标测量密度为1处/(10 m)时,纬地平面智能布线结果见图2。依次计算不同坐标测量密度下路段平曲线线元参数,结果见表6。
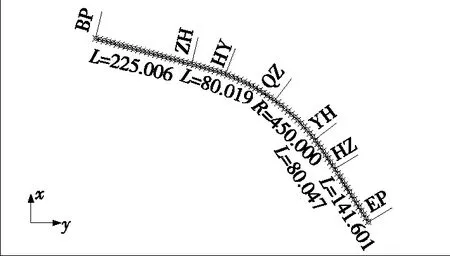
图2 基于理想坐标的纬地平面智能布线(单位:m)

表6 基于纬地平面智能布线的不同坐标测量密度下平曲线参数恢复
2.2.4 恢复方法比较
(1) 平面坐标点完全落在实际道路中线上时,采用三次样条插值法、最小二乘拟合法、纬地平面智能布线法恢复得到的圆曲线半径均可靠。
(2) 采用最小二乘拟合法恢复得到的缓和曲线长度的稳定性差,采用三次样条插值法和纬地平面智能布线法恢复得到的缓和曲线长度较可靠。
2.3 基于实测坐标的平面线形指标恢复
由于测量仪器操作偏差、测量点定位误差,加上从测量面域坐标中提取道路中线坐标时获取的若干坐标通常难以严格落在理想的道路路线上,实测坐标往往存在一定偏差。将坐标测量密度设为1处/(10 m),采用GPS测量该路段数据(与2.2节道路中线实际坐标数据相比,此次测量坐标在偏实际道路中线±25 cm范围内),选择三次样条插值法、最小二乘拟合法及纬地平面智能布线法依次恢复不同坐标测量密度下平曲线参数。
2.3.1 三次样条插值法恢复
采用三次样条插值法恢复该路段平面线形指标,以坐标测量密度1处/(10 m)为例,共计79个坐标点。对78个区间进行三次样条插值,计算得到每个坐标点对应的曲率半径,根据曲率半径变化判断线元属性(见表7)。

表7 基于三次样条插值法的路段各点曲率半径
各区段的端点测量坐标存在误差,采用三次样条插值法恢复线形指标时,在确保各区段光滑连接的情况下,各端点对应的曲率半径稳定性差、跳跃性强,据此判断线形指标较困难。
2.3.2 最小二乘拟合法恢复
采用最小二乘拟合法恢复该路段平面线形指标,以坐标测量密度1处/(10 m)为例,共计79个坐标点。认为该路段是由不同半径圆曲线组成的曲线,以20个点为一组,依次按照圆曲线方程拟合,计算得到每条圆曲线的半径,根据半径变化判断线元属性(见表8)。

表8 基于最小二乘拟合法的系列圆半径
根据圆曲线半径的变化规律,判断各特征点位置,并依次计算不同坐标测量密度下路段平曲线线元参数,结果见表9。

表9 基于最小二乘拟合法的不同坐标测量密度下平曲线参数恢复
2.3.3 纬地平面智能布线法恢复
基于实测坐标,在纬地三维道路设计软件中恢复平面线形,坐标测量密度为1处/(10 m)时纬地平面智能布线结果见图3。依次计算不同坐标测量密度下路段平曲线线元参数,结果见表10。

图3 基于实测坐标的纬地平面智能布线(单位:m)

表10 基于纬地平面智能布线法的不同坐标测量密度下平曲线参数恢复
2.3.4 恢复方法比较
(1) 基于存在测量偏差的实测道路中线平面坐标数据,采用三次样条插值法恢复道路线形指标的适用性差,采用最小二乘拟合法、纬地平面智能布线法恢复得到的圆曲线半径相对可靠。
(2) 坐标测量密度足够大,如1处/(5 m),对于提升缓和曲线长度恢复的可靠性有一定作用,但稳定性不强。
3 结论
本文明确了三次样条插值法在公路平面线形恢复中的概念,提出了恢复道路平面线形指标时无须人工判断线元属性的等距分组最小二乘拟合圆曲线法。针对某干线公路,分析三次样条插值法、最小二乘拟合法、纬地智能布线法用于公路平面线形指标恢复时的适用性和稳定性,主要结论如下:
(1) 当道路中线测量坐标为理想数据或逼近实际道路中线时,采用三次样条插值法、最小二乘拟合法、纬地平面智能布线法恢复得到的圆曲线半径均可靠,采用三次样条插值法、纬地平面智能布线法得到的缓和曲线长度较可靠。
(2) 基于实测道路中线平面坐标数据,采用三次样条插值法恢复道路线形指标的适用性差,且增大测量点密度不能提升恢复结果的可靠性和稳定性。
(3) 基于实测道路中线平面坐标数据,采用最小二乘拟合法、纬地平面智能布线法恢复得到的圆曲线半径相对可靠,且增大测量点密度可提升缓和曲线长度恢复的可靠性,但稳定性不强。
(4) 公路改扩建工程中,恢复道路线形建议采用纬地平面智能布线法;道路交通事故鉴定中,涉及事故路段圆曲线半径评估时,建议采用最小二乘拟合法。
道路线形恢复方法较多,本文仅对比分析了3种较常见的平面线形恢复方法,其他方法的适用场景及优劣对比有待进一步研究。
