变论域Smith-Fuzzy-PID在集中供热系统二网控制中的应用
2023-10-27赵广昊薛贵军张亦睿
赵广昊,薛贵军,2,张亦睿
(1. 华北理工大学 电气工程学院,河北 唐山 063210;2. 华北理工大学智能仪器厂,河北 唐山 063000)
引言
随着集中供热系统不断扩容,热源布局和管网水力工况愈加复杂,作为供热系统热量输配重要环节的二级网,其水力调节作用愈发重要,因此对管网水力平衡调节技术的要求也越来越高,二级泵分布式变频调速技术也应运而生。在各换热站处设置二级循环水泵,即"以泵代阀",通过调节水泵电机频率实现流量调节,增强了供热系统流量的可调性,有效解决了供热系统水力失调现象[1],同时可以达到节能的目的。传统换热站循环水泵往往以工频形式去调节各分支流量,其型号确定后,不能灵活的调节各分支流量,从而既损失了系统热量又浪费了电能,该项研究用变频循环泵代替传统的工频水泵,并且采用基于变论域Smith-Fuzzy-PID[2]的控制策略对循环水泵进行变频控制,该控制策略可实现二网水力工况的优化调节,节约了电能并且提高了供热质量。
1 换热站变频水泵调节流量的原理
在集中供热系统中,循环水泵调速主要是为了保存供热管网中水流的动压,克服系统阻力,其中水泵电机变频调速主要根据式(1)的基本原理实现的:
n=60f(1-s)/p
(1)
式中:n-水泵转速,r/min;
f-电源频率,Hz;
s-电动机转差率;
p-电动机极对数。
因频率f与转速n成正比关系,所以当电源的输入频率改变时,电动机的转速也会随之改变。传统换热站使用工频循环水泵,其流量不能根据实际运行状况进行实时调整,电能浪费严重,因此,把原来的工频水泵换成变频循环水泵,利用变频器对水泵进行调速。换热站的变频调速系统是将循环水泵作为被控对象,把水泵的出口压力作为被控量,在供热系统二级管网中,通过系统设置的目标压力值和实际压力值的差值来调节变频器的输出频率[3],水泵电机转速便可随着变频器输出频率的变化而变化,这样也就能实现对管网流量的实时调控。图1所示为换热站变频调速控制原理图。
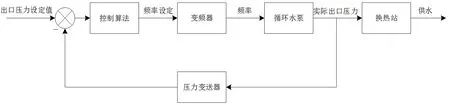
图1 换热站变频调速控制原理图
2 基于变论域Smith-Fuzzy-PID控制器
2.1 模糊PID控制器
模糊PID(Fuzzy-PID)控制器采用模糊逻辑,根据一定的模糊规则,对PID参数进行实时优化,从而克服了PID参数不能实时调节的缺陷。模糊控制有三部分:模糊化、模糊推理、去模糊化。其结构原理如图2所示。
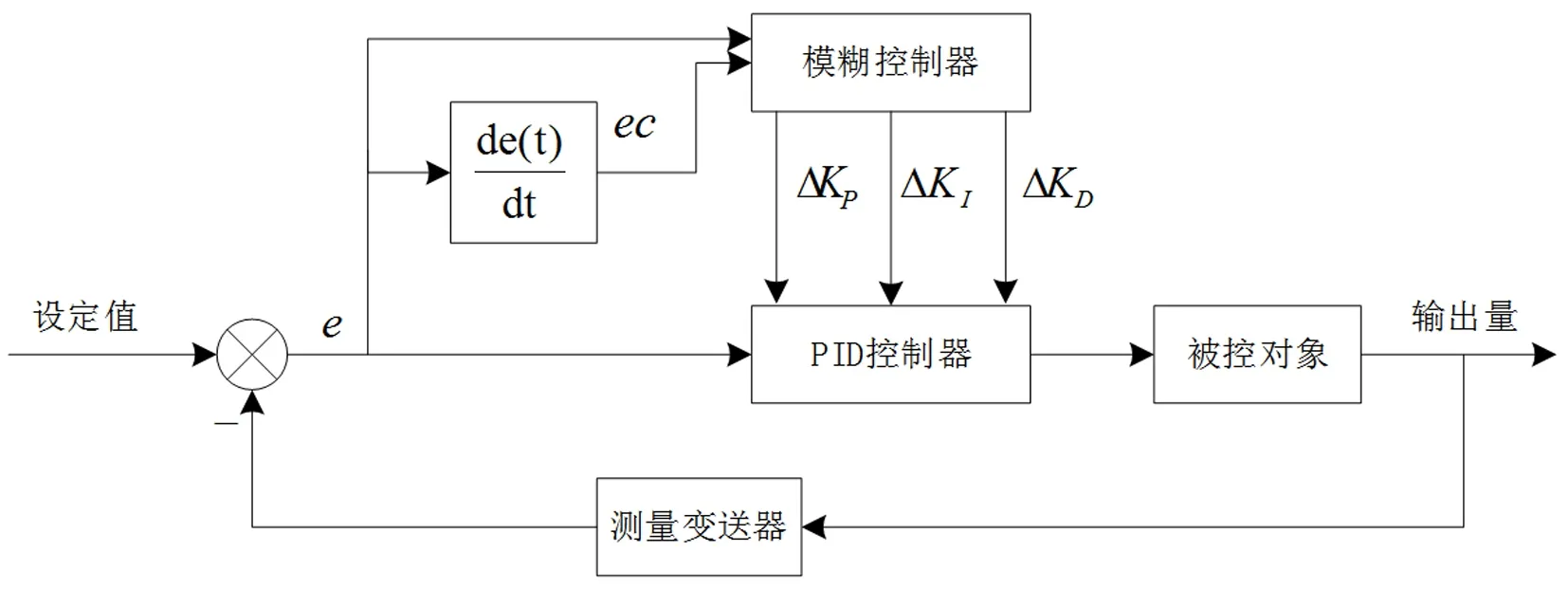
图2 模糊PID控制器示意图
(1)模糊化
该项研究采用的是Mamdani型双输入三输出的模糊控制器[4],输入量为二次网循环水泵出口压力值的偏差e和偏差变化率ec,e的论域为[-0.5,1.2],误差变化率ec其论域为[-1.6,15],输出量为PID控制器实时调整参数ΔKp、ΔKi、ΔKd[5],论域分别为[2,9.5],[1,21],[5,19]。输入输出分成7个模糊子集{NL,NM,NS,ZE,PS,PM,PL}[6],隶属度函数采取的是高斯函数的形式。
(2)模糊推理
模糊PID参数计算公式如式(2):
(2)
式(2)中的KP0、KI0、KD0是模糊PID控制算法的初始参数,它们可以通过试凑、解析等多种方法获得,ΔKP、ΔKI、ΔKD用于对模糊PID控制算法进行实时调节,KP、KI、KD是通过模糊PID控制器修正后的参数。
模糊PID控制器设计常用二维控制器结构建立模糊规则表[7],根据循环水泵系统的实际情况,并结合相关专家经验,得到针对ΔKP、ΔKI、ΔKD的模糊规则控制表,如表1所示。
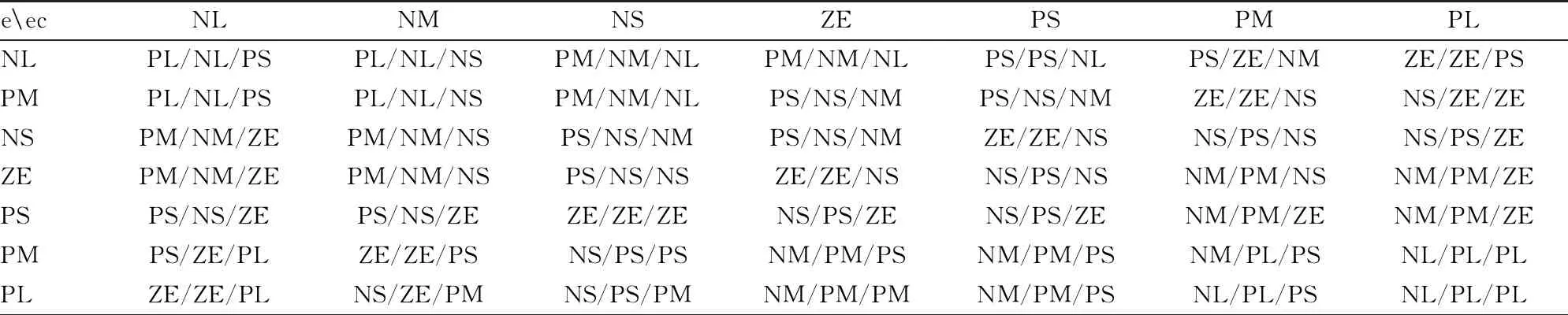
表1 模糊规则表
(3)去模糊化
由于PID控制器仅能识别精准的输入数据,而模糊PID控制器输出的则是离散数值,所以需要对其进行去模糊化。常见的去模糊方法很多,为了更好地将隶属函数运算结果输出,在模糊数值去模糊化时选用目前应用最多的面积中心法,如式(3):
(3)
式中:z0为模糊控制器输出量进行去模糊后的确切值;zi为模糊控制量论域中的数值;μc(zi)为zi的隶属度值[8]。
2.2 变论域思想
尽管模糊PID控制可以克服PID控制器不能实时调节PID参数的缺陷,但是它未能解决模糊规则“爆炸”的问题,即如欲提高控制进度就要增加模糊规则,但这会使控制器过载运转,影响其性能,而如果控制规则较少则无法获取理想的控制精度。为了更好地解决模糊PID控制器的问题,进一步提高闭环系统的控制精度,李洪兴教授提出了变论域模糊PID控制[9],该方法采用了一种新的控制理念,即在不改变控制规律的条件下,可使论域随误差减小而减小,也可使论域随误差增大而增大,这在解决模糊控制初始论域选取问题的同时,提升了控制器的控制精度与抗干扰能力。
变论域调节时,假设输入X的初始论域为[-E,E],输出Y的初始论域为[-U,U],添加输入、输出收缩因子α(x)和β(y),输入、输出经过收缩变换为[-α(x)E,α(x)E]、[-β(y)U,β(y)U]。基本论域与伸缩因子的变化关系如图3所示[10]。

图3 论域变化原理示意图
通常选取伸缩因子:
(4)
式中,x为输入变量,k、λ为伸缩因子的伸缩速率与程度,K为比例系数、pi为输入量加权系数,ei(t)为输入变量误差,β(0)取0。
2.3 Smith预估器设计
由于循环水泵控制系统可能出现滞后的现象,无法及时对末端用户的供热需求予以流量反馈,这是供热行业常见的一种现象,为此,该项目将Smith预估器引入变论域模糊PID控制器中,可消除时滞环节对控制精度的影响,并重点改善由滞后特性导致的系统超调量大的问题[11]。
Smith预估补偿机制原理是把预估补偿器D(s)与被控对象并联构成一种新的控制器,使补偿后闭环系统无迟滞环节,从而消除了迟滞对系统性能的影响。其补偿原理如图4所示。
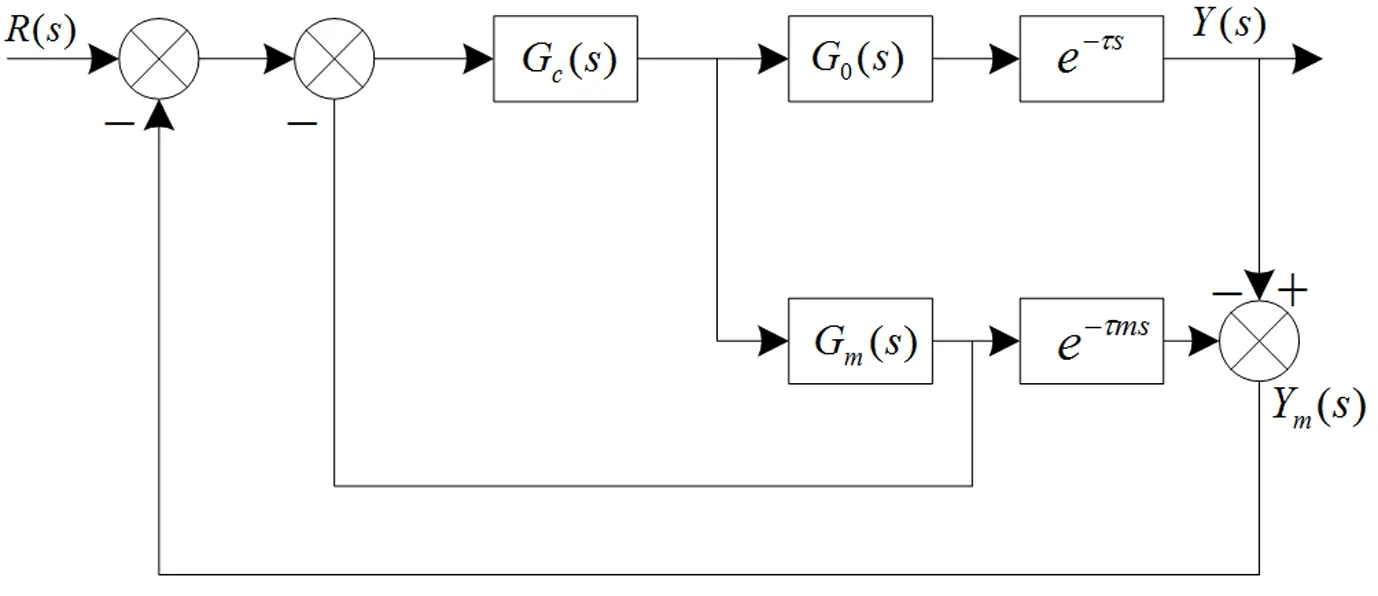
图4 Smith预估器结构
引入预估补偿器D(s)后,其传递函数表达式为:
D(s)=Gm(s)(1-e-τs)
(5)
经过补偿后系统的闭环传递函数表达式为:
(6)
通常在Smith预估器中认为G0(s)=Gc(s),τ=τm,整理后式子为:
(7)
则系统的特征方程为:
1+Gc(s)G0(s)=0
(8)
2.4 基于变论域Smith-Fuzzy-PID控制器的设计
图5所示为变论域Smith-Fuzzy-PID控制器原理图。由图5可知,该项研究设计的基于变论域Smith-Fuzzy-PID控制器以系统偏差e和偏差变化率ec作为输入信号,经过输入伸缩因子整定后输入至模糊控制器,模糊控制器将整定后的信号进行模糊判决并得到判决结果,该结果再通过输出伸缩因子整定后得到输出参数ΔKP、ΔKI、ΔKD输入至PID控制器进而可得到工况参数KP、KI、KD并向被控对象发出指令信号,最后将Smith预估补偿器与被控对象并联以消除滞后因素对整个控制系统的影响。
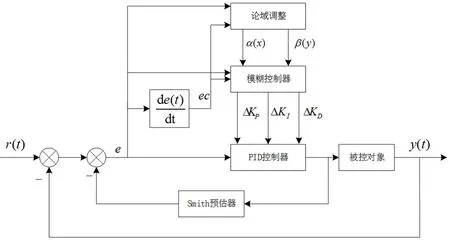
图5 变论域Smith-Fuzzy-PID控制器原理图
3 仿真与分析
3.1 变论域Smith-Fuzzy-PID仿真
为了方便对比,在搭建变论域Smith-Fuzzy-PID模型的同时搭建了PID和模糊PID控制系统模型。设循环水泵出口压力为1 MPa,系统近似模型选取为:
(9)
使用Matlab/Simulink工具,搭建如图6所示的系统近似模型。

图6 控制系统Simulink仿真模型
3.2 变论域Smith-Fuzzy-PID仿真分析
根据上述优化结果,该项研究针对传统PID、模糊PID和变论域Smith-Fuzzy-PID进行了仿真实验。设定PID参数的初始值为:KP0=2,KI0=1,KD0=3,在同等条件下,将变论域Smith-Fuzzy-PID、模糊PID和PID模型进行仿真对比,图7所示为无扰动情况下的仿真结果。
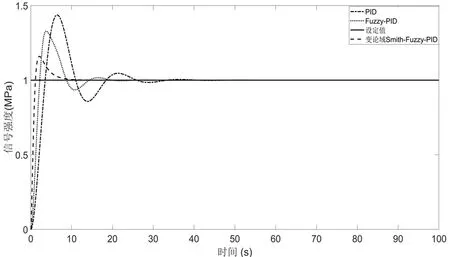
图7 无扰动仿真结果对比图
传统PID控制系统的上升时间为3.569 s,超调量大,调整时间太长,约29 s后才达到平稳状态,响应曲线有明显的振荡;模糊PID上升时间达到了2.235 s,相比于传统PID,它有了很大的提高,相比于PID,它的超调量降低了10.8%,调节时间缩短了大约13 s,响应振荡曲线相对平缓许多;相比于模糊PID,变论域Smith-Fuzzy-PID上升时间减少了1.068 s,超调量降低了17.2%,调节时间大概缩短了8 s,相对于前2种控制模式,该项研究所提出的方法具有最快的响应速度、最小的超调量、响应振荡曲线平稳没有任何振荡,可以迅速达到所需要的压力值,实现了循环水泵出口压力的精确控制,具体仿真性能指标如表2所示。

表2 无扰动情况下的仿真性能指标
分别对PID、模糊PID和变论域Smith-Fuzzy-PID控制方法加入阶跃扰动信号和正弦扰动信号,如图8、图9所示。
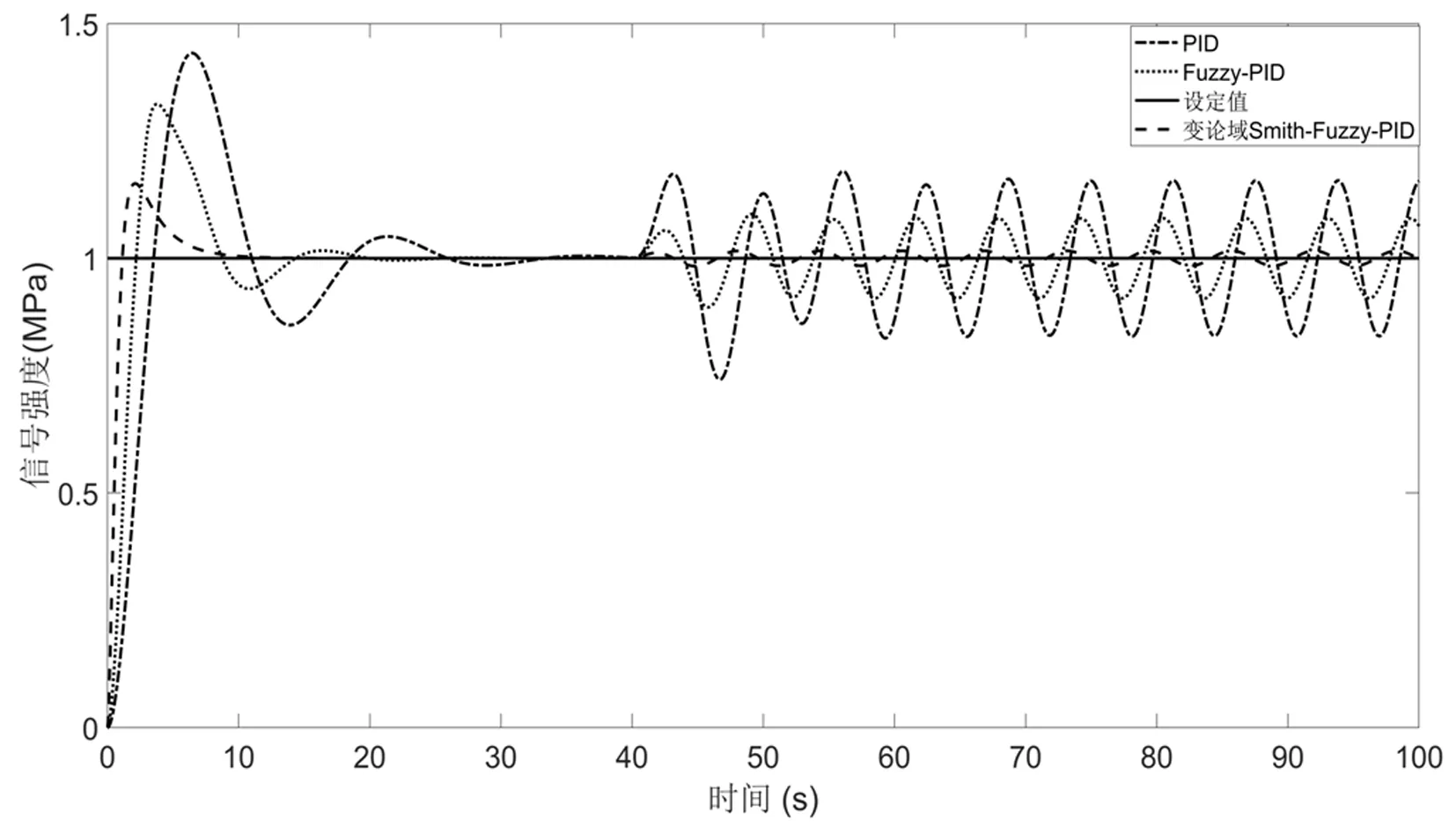
图9 正弦扰动仿真结果对比图
由图8可知,在添加阶跃扰动信号后,PID控制系统振荡幅度最大,并且经过扰动后恢复稳态的时间最长,模糊PID控制系统经过扰动后的振荡曲线比传统PID的振荡幅度明显要缓和,但是其恢复到稳态的时间也较长,在经过阶跃扰动后,变论域Smith-Fuzzy-PID的振荡曲线幅度最小,并且恢复到稳态的时间也最短;从图9可知,在添加正弦扰动信号后,PID和模糊PID控制系统振荡幅度大、振荡频率高,变论域Smith-Fuzzy-PID控制系统经过正弦扰动后的振荡幅度比PID和模糊PID控制系统小并且振荡频率低。由此可知,PID和模糊PID控制系统经过扰动后都有大幅度的振荡,而变论域Smith-Fuzzy-PID控制系统面对扰动能在最短的时间内恢复稳态,并且振荡幅度小,曲线较平稳,具有较强抗干扰能力。
4 结论
(1)提出了一种基于变论域Smith-Fuzzy-PID的控制方法。该控制方法利用Smith预估器补偿系统的滞后环节,引入论域伸缩因子提高了控制器的控制精度和抗干扰性。
(2)利用Matlab/Simulink模型进行了模拟和分析,仿真结果表明,循环水泵控制系统在变论域Smith-Fuzzy-PID控制下超调量为15.7%、上升时间为1.167 s、调节时间为8.306 s,比传统PID和模糊PID控制拥有更短的上升时间、调节时间和更小的超调量,并且在有扰动信号的情况下具有较强的抗干扰性和鲁棒性,可满足控制系统要求,具有一定的实用性。
