纯电动客车加速踏板防误踩控制研究
2023-10-27李文皓黄玉鹏陈振国杨传开
李文皓, 黄玉鹏, 陈振国, 张 刚, 杨传开
(1.中通客车股份有限公司, 山东 聊城 252000;2.山东省新能源客车安全与节能重点实验室, 山东 聊城 252000)
相较于传统机械操纵车辆,纯电动客车动力响应速度快,一旦发生加速踏板被误踩的情况,从理论上讲,造成事故的严重程度会更高。因此,研究可以准确识别加速踏板误踩行为与在误踩行为下切断动力传输的方法,对安全驾驶具有重要意义。
1 驾驶员误踩行为特征分析
误踩加速踏板的原因主要分为两种:一是由于驾驶员心理紧张或疏忽大意,错把加速踏板当成制动踏板;二是由于不当的驾驶姿势或其他因素导致加速踏板踩踏力度异常增加。通过设置阈值的方式可部分有效避免误踩行为,但不同驾驶员具有不同的驾驶行为特征,部分驾驶员在正常急加速时踩下加速踏板的开度和开度变化率与另外一些驾驶员误踩加速踏板时的特征不具备显著性差异[1-2],因此,仅通过设置踏板阈值的方式容易造成行为误判。
经过对实际驾驶案例的调查与研究,部分激进型驾驶员会通过急踩加速踏板的方式实现换道超车。因此,当加速踏板输入超过所设阈值时,有必要设法区分是驾驶员的主动操作或是踏板误踩行为。
通过对多名驾驶员正常驾驶与快速超车的行为进行实际测试,结果见表1。将数据以50 ms为基准划分为不同阶段,计算出不同阶段的加速踏板最大开度变化值。通过数据分析可得,多名驾驶员在正常驾驶时,50 ms内的加速踏板最大开度值分布在12%~21%,快速超车时的加速踏板最大开度值分布在25%~51%。
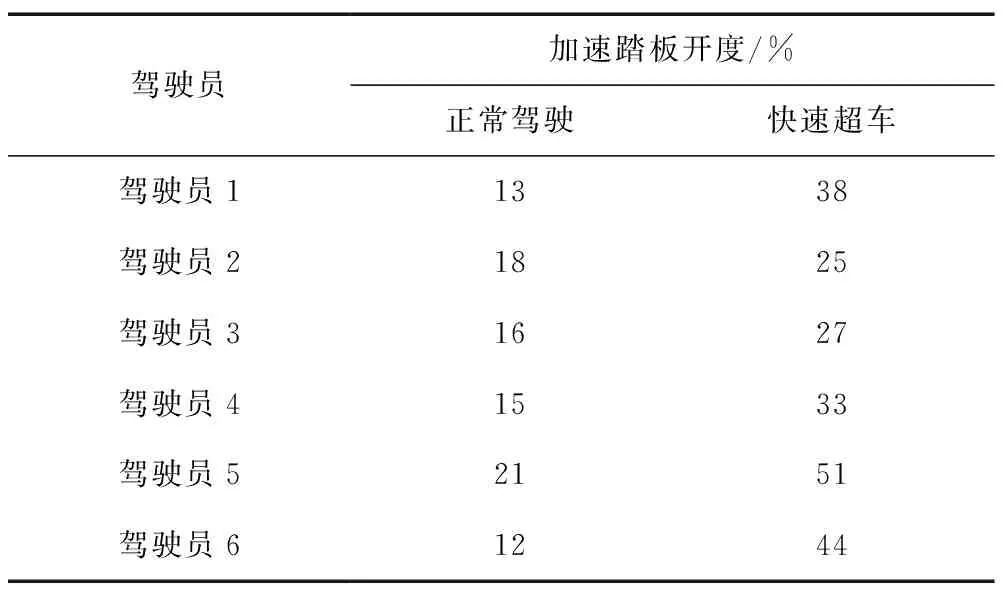
表1 加速踏板50 ms内开度值变化测试结果
通过以上分析,本文将加速踏板开度变化率阈值设置为50 ms内变化50%。
2 电动客车加速踏板防误踩控制系统设计
2.1 控制系统方案
本文设计的加速踏板防误踩系统包括交互层、感知层、控制层、执行层,如图1所示。驾驶员通过踩踏加速踏板与车辆进行交互,通过车载高精度、高性能雷达、摄像头、车速传感器等实时感知车辆前方障碍物距离[3]、驾驶员头部转动角度、车速等信号,并通过CAN通信的方式将融合与处理后的信号传递到整车控制器,通过整车控制器内嵌的控制策略将控制指令传递至电机控制器,最终由电机执行动力抑制指令。
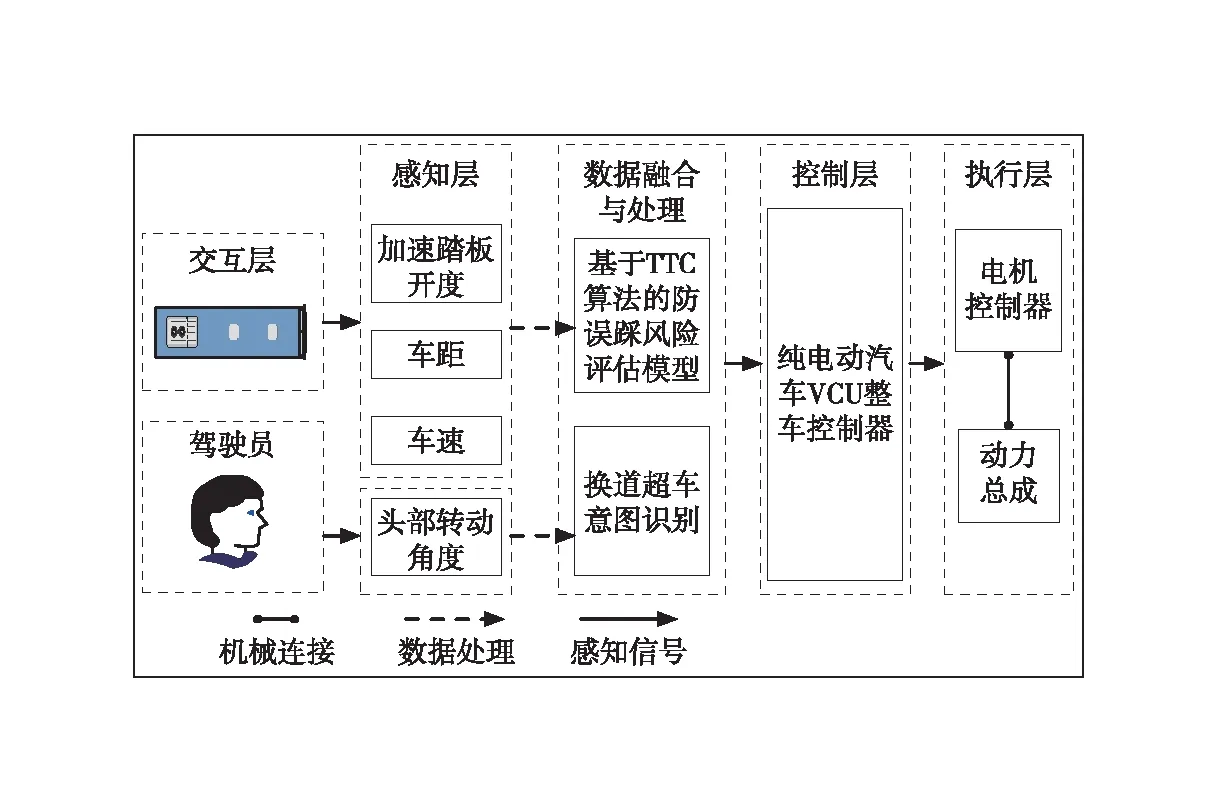
图1 加速踏板防误踩系统架构
如图2所示,纯电动客车采用的电子加速踏板为双通道冗余设计[4],一路模拟量电压为基准值,另一路为校验值,在正常情况下,两路通道输出电压呈两倍关系。通过踏板位置传感器对两通道模拟量电压进行检测,然后将电压信号转换为踏板位置信号并线性对应,同时在CAN网络广播加速踏板开度信号。如系统判断出加速踏板处于误踩时的异常状态,整车控制器不再向电机控制器发出转矩请求,此时电机输出转矩为0。
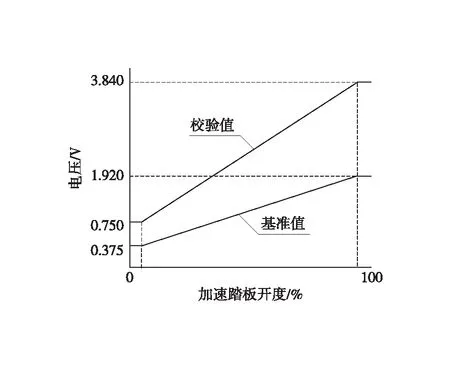
图2 加速踏板电压输出特性图
2.2 风险评估方法
纯电动客车加速踏板防误踩系统的触发时机由风险评估模型决定。本文基于TTC算法设计了防误踩系统的风险评估模型,TTC指驾驶员通过控制车速避免与前方障碍物发生碰撞的时间[5],具体公式如下:
式中:Δs为车辆与障碍物相对距离;Δv为相对速度;Δa为相对加速度。
TTC阈值指加速踏板防误踩系统开始系统介入时的TTC临界值。本文依据避撞测试工况相关研究成果,制定了不同车速下的防误踩系统介入阈值,详见表2。
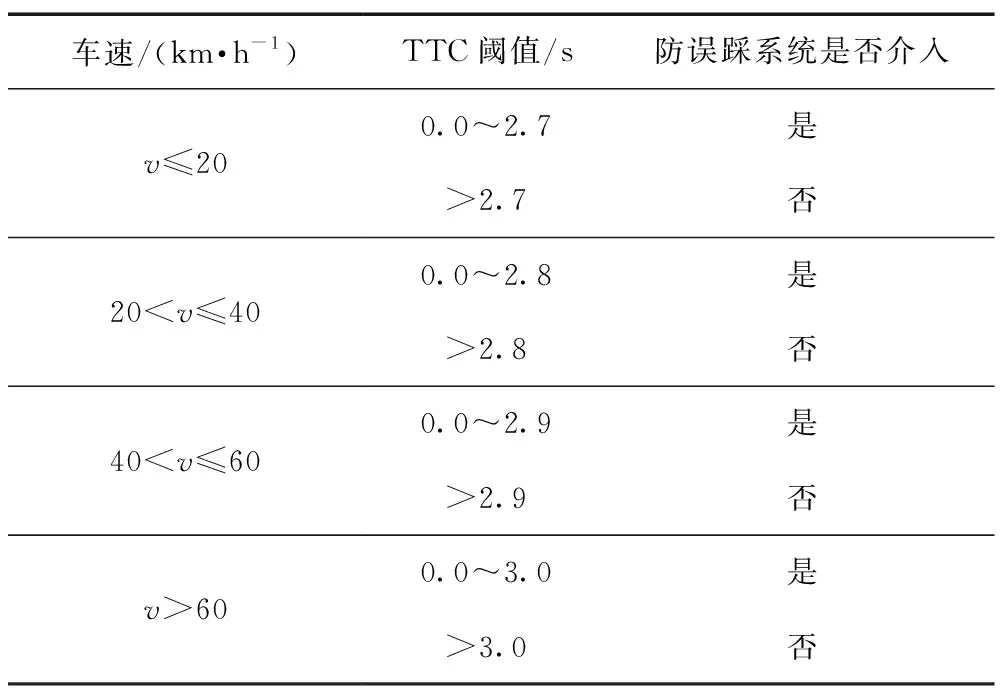
表2 不同车速下防误踩系统介入的TTC阈值
以车速小于20 km/h为例,TTC>2.7 s时为安全行驶等级,防误踩系统不介入,车辆正常行驶,系统发出信号值为0。当TTC≤2.7 s时,雷达传感器探测到车辆存在潜在碰撞风险,届时正确驾驶操作应为踩踏制动踏板或换道避障,而非踩踏加速踏板。因此,将该值设置为防误踩系统的介入阈值,防误踩系统激活,发出信号值1。
3 纯电动客车加速踏板防误踩控制策略
3.1 驾驶员非误踩行为识别
仅设置加速踏板阈值容易造成行为误判,为解决这一问题,提升加速踏板误踩行为识别的准确率,引入驾驶员换道超车意图的判别,即非误踩行为的识别。
相关研究表明[6],意图换道阶段与车道保持阶段驾驶人头部转动角度具备显著性差异。此外,在意图换道超车阶段,驾驶人的注意力将从对车辆的操控转移到对周围环境的观察,通过调整车速以获得有利的换道超车条件,从而导致车辆行驶速度的波动。
本文选取驾驶员头部转动角度与车辆速度的标准差作为驾驶员换道超车意图的表征。当驾驶员单侧头部转动角度大于10°且车速标准差大于6 km/h时判定为换道超车意图,若此时加速踏板的输入超过所设阈值,认定为驾驶员主动操作而非误踩行为。
3.2 防误踩控制系统的时间窗
时间窗是指驾驶员表现出意图换道驾驶行为特征的时间宽度[6-7],时间窗宽度大小对换道意图的辨识有较大影响,且尚无统一的标准,宽度值过小则时间窗内包含的信息不足以对换道超车意图进行判定,宽度过大则会导致识别精度偏低。已有学者通过对比换道之前8 s与换道之前3 s的行为特性,得出在换道之前3 s,驾驶人会表现出典型的注视及操作行为特性的结论[8]。基于该项研究成果,考虑系统的实时性与连续性,采用连续识别的方法,设定时间窗宽度参考值为3 s。
3.3 防误踩控制逻辑
如图3所示,通过计算车辆与障碍物相对距离、相对速度与相对加速度等参数判断车辆是否进入TTC的预警范围。若未进入预警范围,则依据加速踏板位置信号发出转矩请求,响应动力输出。若进入预警范围,防误踩控制系统则被激活,在系统激活状态下,整车控制器实时计算加速踏板开度及其变化率。若开度及开度变化率未超过所设阈值,执行动力输出。当计算出加速踏板开度及其变化率超过所设阈值后,计算前3 s驾驶员单侧头部转动角度以及车速标准差,判断驾驶员是否具备换道超车意图。若系统判断驾驶员具备换道超车意图,则判定为非误踩行为,执行动力输出。反之,则判定为误踩行为,整车控制器将加速踏板输入作无效处理,不再发出转矩请求,动力输出为0。当加速踏板开度置为0且重新采集到有效的加速踏板开度值时,则依据当前踏板位置信号请求转矩,恢复电机转矩输出。
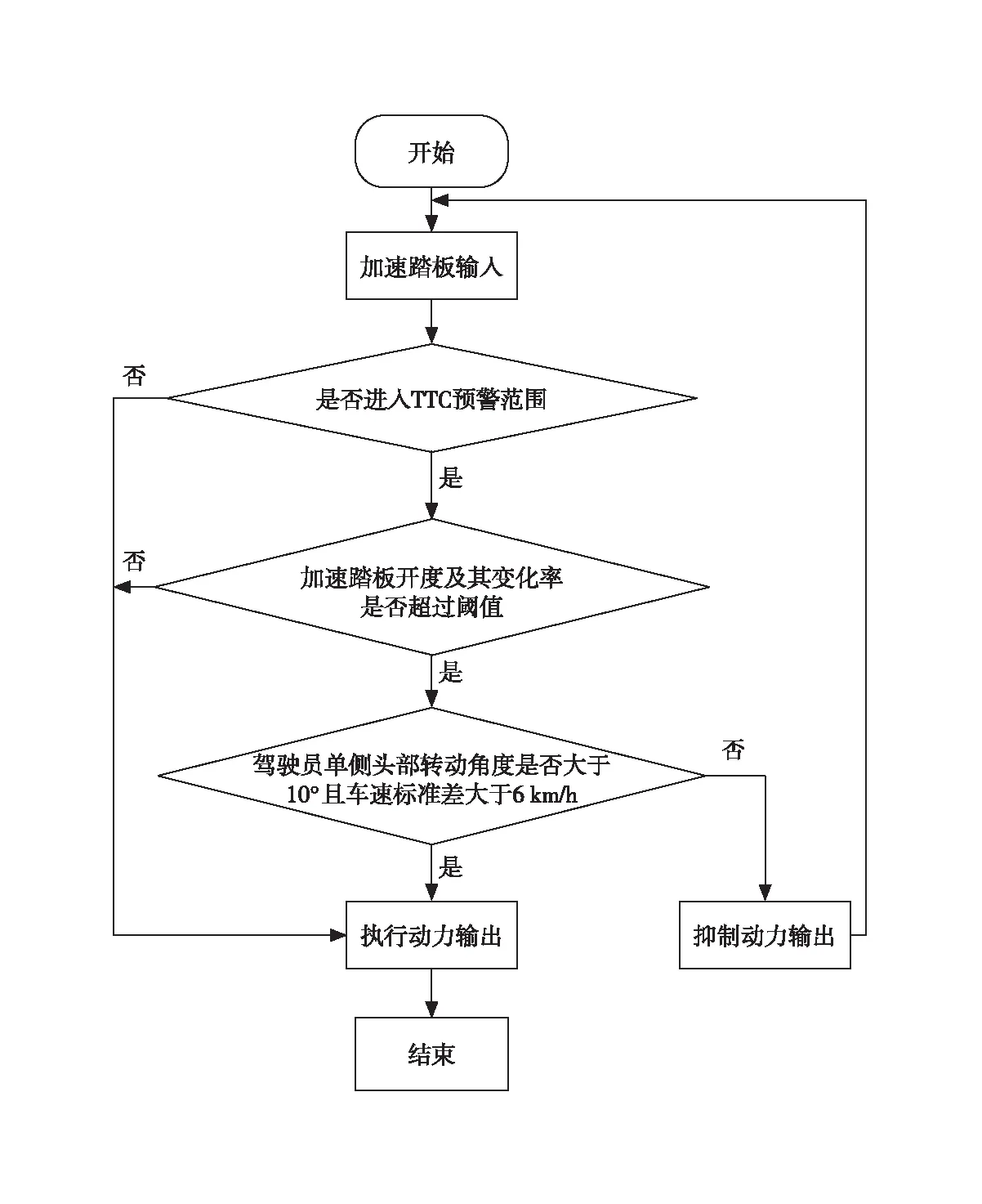
图3 防误踩控制逻辑流程
3.4 制动控制
当加速踏板状态被判定为误踩,执行动力输出为0的同时执行制动操作[9]。车辆制动所需的减速度由车辆与障碍物纵向距离Δs及车辆与障碍物纵向相对速度ΔV决定。本文采用模糊控制算法对车辆制动进行模糊控制,输入量为纵向相对距离Δs,纵向相对速度ΔV,输出量为车辆减速度aout。
如图4和图5所示,考虑传感器的探测范围,将ΔV的论域设置为[0,80],模糊语言变量为V1、V2、V3、V4、V5;Δs的论域设置为[0,100],模糊语言变量为S1、S2、S3、S4、S5、S6。如图6所示,将aout的论域设置为[-10,0],模糊语言变量为N1、N2、N3、N4、N5、N6。利用MATLAB Fuzzy Toolbox建立模糊控制器,如图7所示,模糊关系法则为Mamdani,解模糊法为重心法。在隶属度函数中,纵坐标[0,1]表示输入变量的隶属度,指输入数据与该模糊集合的匹配程度。

图4 纵向相对速度隶属度函数曲线
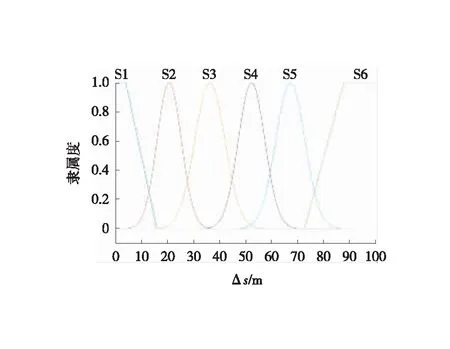
图5 纵向相对距离隶属度函数曲线

图6 输出减速度隶属度函数曲线

图7 模糊控制输入输出变量曲面
纯电动客车制动力来源于电机,通过模糊控制器输出的减速度值,依据车辆在道路上制动时的力学平衡方程[10],则可以得出不同减速度情况下的制动需求扭矩Btq:
式中:δ为旋转质量换算系数;m为整车载重;a0为车辆需求减速度;g为重力加速度;f为滚动阻力系数;α为坡度角;CD为风阻系数;A为迎风面积;V为车速;r为半径;i0为后桥速比;ηT为传动效率。
4 加速踏板防误踩控制策略仿真
基于上述控制策略,采用MATLAB/Simulink搭建了防误踩控制系统仿真模型。如图8和图9仿真工况所示,设置相对加速度为0,加速踏板开度及其变化率超过阈值且未判定为换道超车意图。
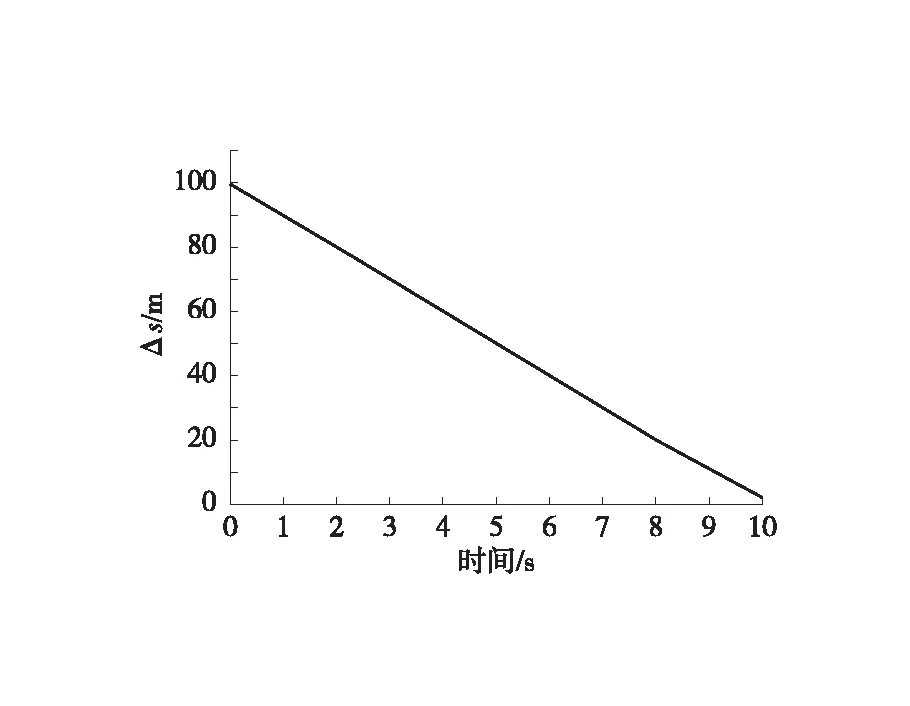
图8 相对距离变化曲线
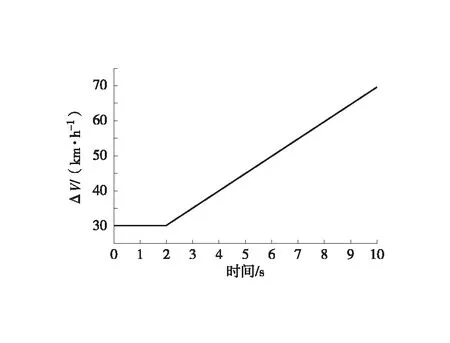
图9 相对速度变化曲线
如图10和图11仿真结果所示,当没有进入TTC的预警范围时,防误踩系统发出信号值0,系统未介入,正常响应加速踏板输入。当进入TTC的预警范围后,系统正确发出信号值1,防误踩控制介入,车辆进行制动,且在车辆与障碍物相对距离越小、相对速度越大的情况下其输出减速度越大,满足控制要求。不同距离与速度下的车辆减速度曲线变化平滑,未出现大幅度波动。
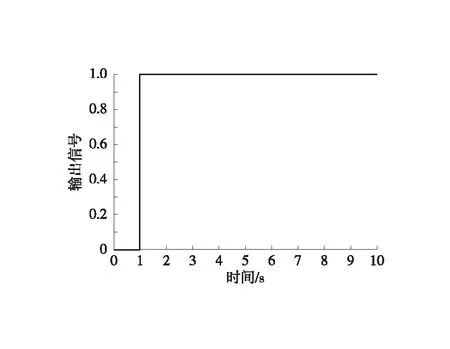
图10 TTC的预警信号变化曲线
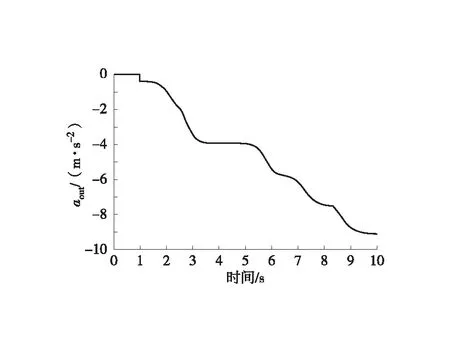
图11 输出减速度变化曲线
5 结束语
本文提出了一种纯电动客车加速踏板防误踩控制方法,将TTC的阈值设置为防误踩控制系统的触发时机。基于驾驶员头部转动角度信号以及车速标准差区分了驾驶员主动急踩加速踏板进行超车与误踩加速踏板的行为,提升了防误踩控制识别的准确率。最后,设计了误踩加速踏板情况下的车辆制动模型,并采用MATLAB/Simulink进行了仿真,结果表明设计的控制策略及模型满足控制要求。