摇摆条件下舰炮安全射界解算控制研究
2023-10-26夏方超张满慧张晓俊
夏方超,张满慧,姚 忠,张晓俊
(西北机电工程研究所,陕西 咸阳 712099)
0 引言
在大口径舰炮装舰条件下,为保障作战过程中舰艇设备完好、避免舰艇自伤情况,明确其安全射界是首要前提[1]。由于舰炮设计定型后的方位/高低角范围、方位/高低跟踪速度、方位/高低跟踪加速度、通信周期等都是固化指标。因此,为寻求避免直接危及本舰设备、近距离危及它舰火力交叉的安全射界,需要根据舰炮主要战技指标及装舰要素进行禁射区主动设计,研究舰炮固定和活动危险边界轮廓。
当前,国内外学者对舰载武器禁射区的研究已由粗糙计算转变为精细求解。孙明等研究了舰载武器安全射界的计算原理,并分析了安全射界与作战效能的映射关系[2]。王亮等提出了一种基于裕度的舰载武器禁射区计算方法,建立了考虑舰艇运动的禁射区空间几何计算模型[3]。余戌曈等研究了舰艇摇摆引起的射界动态变化,以及对目标分配的影响[4]。王赟等设计了舰载武器安全射界软件,通过硬件实现、软件解算保障射击安全性[5]。金永明系统研究了舰炮射界的多影响因素,提出利用浮动射界、减小理论滑行角等扩大射界的方式[6]。傅冰等通过交战弹道命中前的空间关系与火力冲突分析,实现跨平台武器射弹命中前火力兼容性的量化表征[7]。然而将现有成果移植应用于舰炮禁射区设计时,还存在着以下问题:1)固定安全射界解算考虑了舰炮射线与舰面障碍的安全裕度,但忽略了舰艇摇摆运动引起的射界滑行,危险边界无法恰当地包络舰炮单元的火线;2)活动安全射界主要采用射线或圆锥体假设的舰炮火力散布模型解算,射弹与舰外障碍的火力交叉影响因素分析不全面,还难以实时解析舰炮射击危险出现的时机。
针对现有舰炮射界轮廓动态变化及禁射区的主动设计问题,本文开展了摇摆条件下舰炮安全射界解算控制研究。通过定性识别出舰炮安全射界的主要影响因素,将射界解算问题转化为舰艇摇摆条件下的舰炮弹道冲突判定。分别建立了随动定点射击方式下的舰炮禁射点解算模型、随动跟踪射击方式下舰炮禁射区域搜索模型,以确定当前射击诸元在本舰火力打击与跨平台武器作战情况下是否安全可靠,并由此获得舰炮射击轮廓和全射击域内的禁射范围,为优化舰炮射界、实现舰炮射击安全控制提供依据。
1 舰炮安全射界影响因素识别
大口径舰炮的固有射界通常由舰炮设计定型时的方位角、高低角确定,表示舰炮回转、俯仰运动所能达到的二维界限。安全射界是舰炮装舰后允许射击的最大回转、俯仰角度,表示满足作战任务需求的发射轮廓曲线,如图1 所示。

图1 大口径舰炮的安全射界Fig.1 Safety firing boundary of naval guns of large caliber
假设固有射界是二维半球结构,安全射界可视为二维半球的子集,缩减区主要由舰炮射弹时的舰面与舰外障碍干扰导致。有障碍之处一定不能射弹,无障碍时也要考虑压力波和爆炸碎片等对周围的影响,相关因素识别如下。
1)装舰结构。大口径舰炮通常安装于舰艏和舰艉处,在总体位置布局上直接影响舰炮的方位射界允许范围。舰炮基座影响高低射界允许范围,舰艏上翘将减小低角,基座升高虽然能增大低角,但也会增大射击翻转力矩,限制高角范围。
2)弹药类型及弹道特性。舰炮射弹时的炮口冲击波、炮口焰、弹托和金属药筒等都会对舰炮附近的舰面设备产生影响,需要考虑弹药与舰面障碍的裕度。此外,多舰载武器使用需计及弹道特性的影响,弹丸飞行轨迹与舰面障碍、舰外障碍都不能发生干涉。
3)舰炮滑行特性。舰炮以最大瞄准速度跟踪目标射击时,若在危险射界边缘开始执行舰炮停射指令,则必须计入控制系统通信延时、瞄准随动系统动作延时、内弹道时间间隔内的舰炮滑行角度,也即是大口径舰炮停射滞后现象[8]所引起的禁射提前角。火控计算机弹道解算、目标信息获取时延等在下发射击指令前的系统延时,并不计及在内。
4)舰艇摇摆运动。舰艇周期性摇摆会使得大口径舰炮产生非惯性运动,导致其射界也动态变化。一是使舰外障碍在舰炮坐标系和稳定舰艇坐标系下的位置发生方位和高低偏移,二是引起弹丸出炮口时的切向速度变化,影响弹丸飞行轨迹与舰面障碍的安全距离。
考虑上述因素的综合作用,舰炮安全射界解算问题可描述为:在舰艇摇摆条件下,计算舰炮射击诸元的未来弹道轨迹,求解该轨迹与障碍位置的最小距离;根据舰面、舰外障碍裕度进行冲突判定,明确射击诸元是否处于禁射区域;当舰炮诸元具有滑移区域时,需结合障碍类型进行活动危界解算,无滑行时开展固定危界解算,获得舰炮发射轮廓曲线。
2 舰炮安全射界解算的数学基础
2.1 摇摆作用下的舰炮指向运动建模
为简化研究但不改变问题的本质,此处主要考虑对大口径舰炮射击影响最大的舰艇横摇、纵摇[9]和垂荡运动,并结合甲板炮位结构设置坐标系如图2 所示。其中,惯性系{E}的原点设置在舰艇摇心处,并假定随舰艇匀速运动。舰体系{W}的原点初始与摇心重合,相对惯性系移动;WX指向舰艏方向,WZ正向与甲板法向一致,WY按右手法则建立,相对惯性系转动。舰炮系{F}的原点与甲板炮位安装中心重合,轴向与舰体系的坐标轴一致。工具系{T}原点位于炮口中心,TX正向与身管轴向一致,TZ正向位于身管纵截面(射击平面)且与TX垂直,TY按右手法则建立。

图2 大口径舰炮的串联运动链模型Fig.2 Series kinematic chain model of naval guns of large caliber
结合旋量坐标不变性,采用指数积公式[10]构建出工具系{T}相对舰炮系{F}的位姿变换矩阵为
根据坐标变换关系,可推导出炮口工具系{T}相对惯性系{E}的位姿模型为
计算可得
2.2 摇摆作用下的弹丸切向运动建模
其中,we是工具系在惯性系中的角速度矢量。
再指定炮口上任意一点OA在工具系中的位置矢量为xA,利用矢量运算推导出点OA在惯性系中的位矢、速度和加速度分别为
式(7)即给出了惯性系中工具系原点后坐运动过程中也包含弹丸出炮口(膛内运动时期)瞬时的切向运动模型。
3 舰炮安全射界解算模型
3.1 弹丸飞行滞后响应
如图3 所示,在惯性系中,采用矢量U 表示舰面或舰外障碍的位置坐标,并以距离D 表示安全裕度(涵盖压力波和碎片等因素)。对于障碍舰体的尺寸/距离,转换为中心原点及球半径,也即采用舰外障碍位置及安全裕度描述。
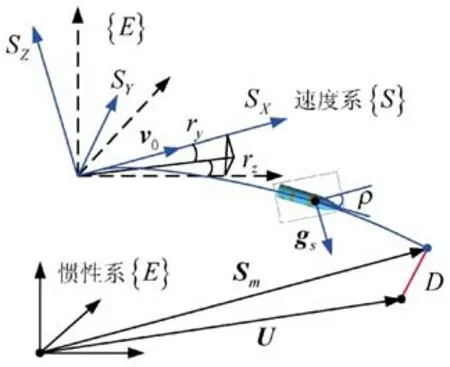
图3 弹丸飞行轨迹与障碍物的相对位置关系Fig.3 Relative position relationship between the trajectory of projectiles and the obstacles
当弹丸膛内运动结束时,出炮口瞬时的绝对速度分量可根据式(7)获得,进而能够推导出速度系{S}相对惯性系的齐次变换矩阵为
其中,vx是弹丸初速的合成量;vy,vz是弹丸切向速度;Rot 是旋转矩阵算子。
其中,gs是重力加速度在速度系Z 向分量;ρ 是弹丸速度矢量与X 轴夹角;C 是弹道系数,H 是空气密度函数,F 是阻力函数,其物理含义和数学模型详见文献[11-12]所述。

再利用式(8),得出在惯性系中表示的弹丸飞行未来点坐标为
最后,推导出弹丸飞行弹道与障碍点位置坐标之间的最小距离裕度为
3.2 舰炮指令滞后响应
虽然舰艇的作战体系架构在不断发展,但是舰炮从接收禁射信号(全舰公共计算环境与舰炮监控台)到禁射响应(舰炮监控台与射击电路)之间仍存在着一定的偏差。由于采样频率的差异出现延时,引起的停射滞后现象主要表现为舰炮从接受禁射信号直到舰炮断开射击电路所运行的滞后时间和危险角度。此外,考虑到射击间隔也可能恰好处于舰炮射击前沿,故而还需要再计入发射内弹道时间。
在时延因素影响下,舰炮停射滞后角为
值得说明的是,即使大口径舰炮和全舰通信的步调节拍一致,为确保射击安全可靠,也应考虑测量数据与计算数据的误差,保留式(12)中的最大延时周期。
3.3 定点射击方式下的禁射点解算
在大口径舰炮随动定点射击方式下,同时考虑跨平台射击情况,禁射点解算的数学问题表示为:已知弹丸出炮口瞬时的舰艇摇荡运动参数、舰炮射击诸元参数、弹丸膛内运动参数、舰面障碍位置、舰外障碍位置(包含本舰火力打击目标障碍点和多平台武器作战弹道轨迹空间点)等,通过求解弹丸飞行轨迹上任意点与障碍点之间的最小距离,再根据安全裕度求解冲突判据,从而实现跨平台武器射向交叉、射界重叠条件下的火力冲突分析。数学模型为
将计算参数输入相关模型后,可得出中间变量参数,进而输出冲突判据,并判定当前射击诸元(含摇摆作用)是否为禁射点。
若不考虑舰艇摇荡参数时,对固定射界中的方位角和高低角进行扫描,即可获得射击轮廓曲线。再计及摇摆条件时,会出现射界滑行散布现象,只能实时解算舰炮禁射点。
3.4 跟踪射击方式下的禁射区域搜索
在大口径舰炮随动跟踪射击方式下,同时考虑跨平台射击情况,禁射区域搜索的数学问题为:已知下达射击指令瞬时的舰艇摇荡运动参数、舰炮随动跟踪参数、通讯时延参数、膛内运动参数、障碍位置等,面向跨平台武器交战全航路各阶段,求解弹丸飞行轨迹与障碍点之间的安全裕度,明确发生火力干扰冲突所处弹道、航路阶段,从而得出跨平台舰炮跟踪射击的动态射界。冲突判据的数学模型为
式(14)省略的中间变量解算与式(13)的基本一致,仅是输入参数存在差异。通过求解冲突判据明确下达射击指令瞬时的舰炮诸元(含摇摆作用)是否为禁射点,并结合随动滑行角得出舰炮禁射区域。解算流程如图4 所示。

图4 大口径舰炮禁射区域解算流程Fig.4 Calculation flow chart for the firing prohibition areas of naval guns of large caliber
分析可得:舰炮随动定点射击方式下的禁射点解算是跟踪射击方式禁射搜索的简化情形,当不计及舰艇摇摆条件时,能够刻画出不同射击诸元下的禁射区域。考虑摇摆作用后,则需要根据舰炮摇荡响应实时解算活动安全射界。
4 仿真结果及其分析
为验证所建解算模型的有效性,不妨假定某舰艇摇荡运动参数[9]、舰炮装舰结构参数、方位角和高低角范围、后坐运动/弹丸膛内运动参数、跟踪角速度、通讯时延等分别为
根据定点射击禁射解算模型,当不考虑舰艇摇荡条件时,获得舰面、舰外障碍对应的禁射点集合如下页图5 所示。其中,远离障碍点的定点射击角度都被省略;高低角和方位角范围是与禁射角相近区域,并不是固有射界。考虑摇摆条件时,不同舰炮射击诸元的禁射情况如图6 所示,其中,摇荡运动参数都选取半周期特征点计算,禁射结果都基于理想弹道轨迹得出,与实际射击环境存在一定差异,当其修正为刚体弹道模型时可得出与真实物理环境相近的禁射区域。

图5 静水条件下定点射击禁射角度集合Fig.5 Fixed-point firing prohibition angle set under the stationary water condition

图6 摇摆条件下定点射击禁射角度集合Fig.6 Fixed-point firing prohibition angle set under the swaying condition
通过分析定点射击解算结果可以得出:静水条件下,舰面障碍的禁射集合较为规整,舰外障碍的散布特征明显;摇摆条件下,舰面障碍和舰外障碍的禁射分布都存在较大差异;表现在静水条件下的禁射性质发生转变,部分由禁射点转变为风险点,部分由非禁射点转变为风险点或禁射点;静水条件下的射界轮廓曲线已然失效,摇摆条件对舰炮射击时机提出了更高的要求。


图8 摇摆条件下跟踪射击禁射区域Fig.8 Firing prohibition area of tracking shot under the swaying condition
通过分析跟踪射击解算结果可以得出:与定点射击禁射解算结果相比,跟踪射击结果并非其简单的外推轮廓曲线,且不同跟踪方式下的解分布具有差异性;与静水跟踪相比,摇摆条件禁射区域相对规整;在恰当的摇摆参数下能够避开原有禁射区域,禁射性质变化使得安全射界轮廓分布的实时性更强。
综上可知:摇摆条件下,无论是定点射击还是跟踪射击方式,舰炮安全射界轮廓都具有强实时性;在舰炮资源确定的情况下,所建解算控制模型能够判定当前射击诸元是否安全可靠,可为改善舰炮射界利用率提供依据。此外,将所建模型的障碍点扩展为跨平台武器弹道轨迹点,也可获得多舰情况下的火力干扰冲突条件,明确本舰武器射向交叉、射界重叠条件下的有效打击区域。
5 结论
为保障大口径舰炮射击安全可靠,建立了舰炮安全射界的解算控制模型。在定性识别出装舰结构、弹道特性、停射滞后现象、舰艇摇摆运动等主要影响因素的基础上,推导出摇摆作用下的舰炮指向运动、弹丸切向运动、弹丸飞行滞后及舰炮指令滞后响应等定量表征模型。再结合舰炮定点和跟踪射击方式,根据舰炮弹道冲突判定给出了禁射解算、禁射搜索模型,提出了安全射界解算控制流程。
仿真结果表明:对于障碍物约束,静水条件解算得出的固定/活动禁射轮廓在摇摆条件下会发生禁射性质变化,存在禁射点、风险点及非禁射点转换情形,恰当的摇摆参数能够避开原有舰炮禁射区域;摇摆条件下,跟踪射击禁射轮廓并非是定点射击轮廓的“滑行”结果,对舰炮射击指令下发时机要求更高;所建模型可以判断舰炮射击诸元在本舰火力打击与跨平台武器作战情况下是否处于禁射区域,能够实现舰炮射界轮廓动态优化,为舰艇编队多舰炮武器组织运用研究提供支撑。
