等强度正交梁的二维湍流传感器*
2023-10-25宋大雷刘晓源韩德超陈小平宋源基王向东
宋大雷,刘晓源,韩德超,陈小平,宋源基,王向东
(1.中国海洋大学 工程学院,山东 青岛 266100;2.中国海洋大学海洋高等研究院,山东 青岛 266100;3.中国海洋大学基础教学中心,山东 青岛 266100)
0 引 言
湍流是引起海洋混合最重要的形式之一,海水中的能量(动量、热量、质量等)最终都是以湍流混合的形式耗散掉的,湍流对海水的温盐特性以及颗粒物在海洋中的分布有着十分显著的影响[1]。对湍流能量耗散的研究有利于对海洋内部运动的机理进行物理建模,而剪切传感器是海洋湍流观测的最常见的仪器[2]。剪切传感器最先应用在大气中湍流的测量,Osborn T[3]在1974 年首先将剪切传感器成功应用到海水中湍流的测量。文献[4]在压电陶瓷与剪切探头之间增加了悬臂梁结构,进一步提高了剪切传感器的灵敏度。进行海洋湍流观测时,衡量湍流混合强度的关键参数是湍流动能耗散率[5]。受实验手段和仪器的限制,国内外应用于海洋观测的湍流剪切传感器主要以一维为主,因此只能基于“均匀各向同性”[6]的假设,即仅能实现对湍流未知演化的一维数据观测。通常进行湍流观测时由2只一维传感器按照敏感轴正交方法进行安装,不可避免地存在安装误差,难以实现精准的单点多维观测。
1 二维湍流传感器工作机理
1.1 等强度正交梁式传感器结构
湍流在形成和消散过程中并非各向同性,在微尺度上具有一定的空间分布特性。Kolmogorov尺度下湍流理论[7]指出,在亚惯性尺度和耗散尺度[8]两种状态下,湍流在能量耗散方面比其他状态下有着更强的间歇性和相异性。只有获得高分辨率的矢量性湍流演化信息才能够更好地解释湍流的形成和混合扩散过程[9],因此湍流观测的二维湍流传感器的研究就十分必要。目前,测量湍流时常用2 只一维传感器正交放置来达到测量二维的效果,但2 只传感器最小间距为3 cm,这对研究微尺度湍流空间分布与能量耗散机理而言,探测维度和精度不够。因此,针对深海微尺度湍流观测,设计了高分辨率高灵敏度的MEMS 二维湍流传感器。等强度正交梁传感器结构如图1所示。
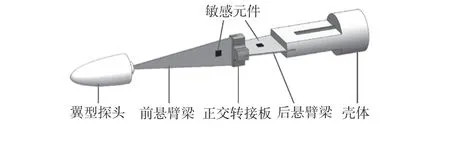
图1 等强度正交梁传感器结构
1.2 传感器感测机理
等强度正交梁结构的二维湍流传感器具体实现机理[10]如图2所示。
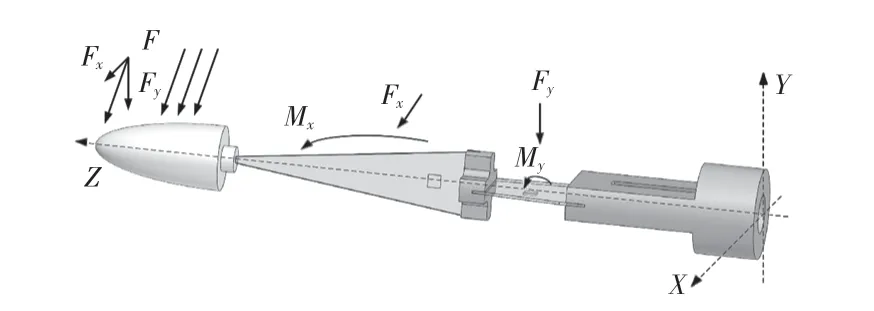
图2 等强度正交梁受力分析
剪切方向的湍流F作用于翼型探针时,探针的摆动对等强度三角形悬臂梁(X 轴方向)产生弯矩Mx,梯形悬臂梁(Y轴方向)产生弯矩My,等强度梁发生应力应变,集成于等强度梁的压敏电阻阻值发生变化,通过惠斯通电桥[11,12]提取该变化继而得到湍流信息。
根据等强度梁特性,同一悬臂梁各横截面上的最大正应力大小都相等。悬臂梁上某一点x应力分布为
式中 h为截面高度;Wz为截面惯性矩;M 为悬臂梁所产生的弯矩;n 为施加荷载处到截面的距离与截面宽度的比值。电阻产生应变时,由电阻率变化而产生的电阻相应变化为
式中 σl为纵向应力;σt为横向应力;γl为纵向压阻系数;γt为横向压阻系数。
在梁的纯弯曲形变过程中,横向应力可以忽略,因此式(2)可以简化为
正交悬臂梁检测电路所组成的惠斯通全桥如图3所示。
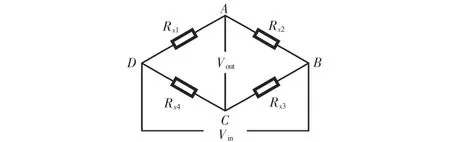
图3 惠斯通电桥检测电路
电压输出的变化量为
式中 Vout为MEMS 的输出电压,即惠斯通电桥的输出电压;Vin为MEMS的±5 V供电电压,也就是惠斯通电桥的通电电压。
翼型剪切探头在流体中受力分析得到探头受到剪切力
式中 U为合流速;α为流体与传感器轴线夹角;ρ为流体密度;A为探头受力面积;V 为剪切流速;u 为水平方向流速。
剪切力与输出电压的关系为
式中 π为压阻系数,其值为102.2 ×10-11m2/N。
传感器输出电压与剪切力成正比,在U 一定的情况下,Vout与sin2α成正比。定义灵敏度系数
式中 S为灵敏度,Vms2/kg;Vout为剪切探头输出的均方根电压,V。
从而建立剪切流速与电压的关系,通过灵敏度标定实验建立二者关系,由测量的电压大小便可反向推导出剪切流速大小,进而通过剪切流速由湍流反演算法得到海洋湍动能及耗散率。
2 等强度正交梁建模仿真
通过软件进行仿真[13],分析正交梁在不同水流冲击下的受力变化情况,进而确定敏感元件在两悬臂梁的等强度位置。通过Ansys建立传感器正交梁结构模型,根据材料结构、参数改变模型中正交梁结构及应变材料的应变系数,分析正交梁等强度位置,然后在仿真分析前后弹性梁形变量相同的位置对称贴传感器应变芯片,保证等强度设计要求。根据0.6 ~0.7 m/s 流速下计算出的剪切力加载到翼型探头上,得到悬臂梁内部结构变形云图。不断调整结构模型及贴片位置,得到最佳正交梁设计结构。图4(a)~(d)分别为正交梁从不同角度进行仿真受力分析。
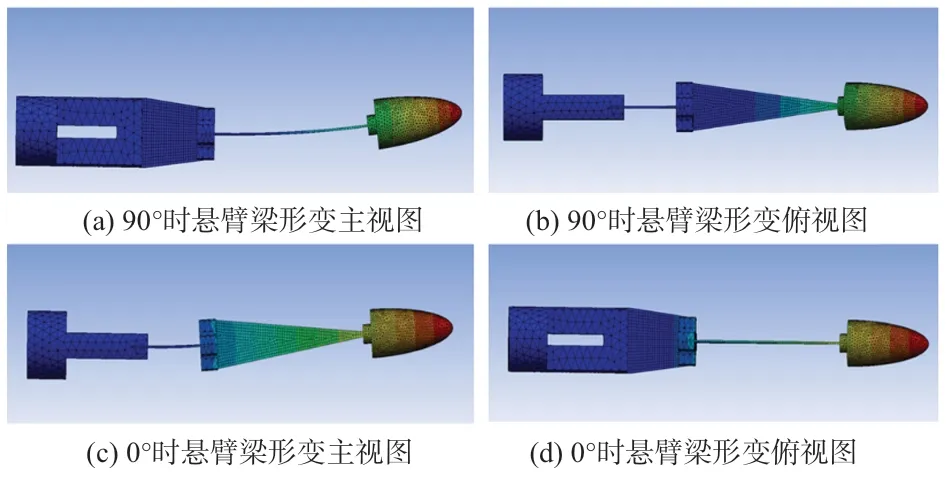
图4 正交梁仿真受力分析
仿真实验中,将水流与前梁和后梁分别呈0°、90°的倾角,形变云图显示了在水流的作用下前后梁的受力状况。且当水流冲击与前后梁均呈45°时两梁的受力形变程度一致。从而实现了传感器正交梁机械结构的等强度设计。在此基础上对二维湍流传感器进行校准标定实验来确定传感器的灵敏度参数。
3 剪切传感器的校准实验
在实验室设计了用于传感器灵敏度测量的标定系统[14],如图5所示。其标定原理是由灵敏度计算公式(7)得到,水的密度和射流流速为常数,所以灵敏度变为了输出电压与攻角α 的比值,两者呈线性关系,所以通过不断改变α的值得到相应的电压值,每2°得到1 个电压值,得到多组数据后,对所得数据进行拟合,最终得到灵敏度值。
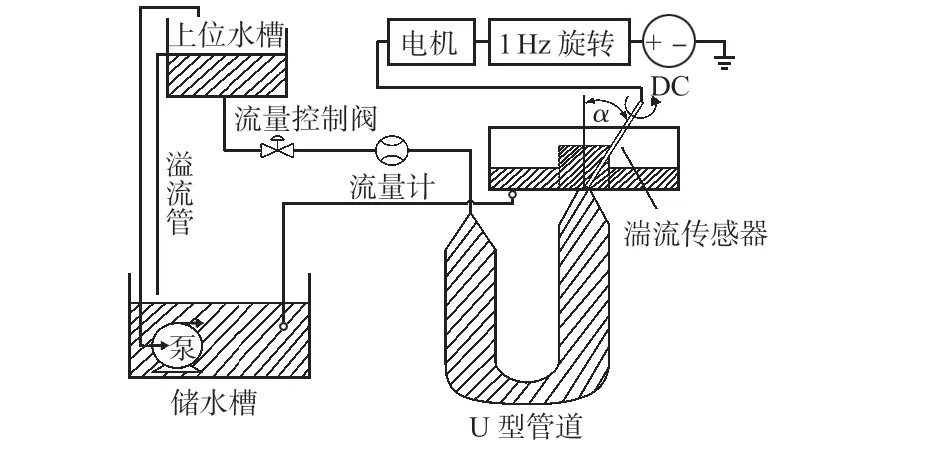
图5 标定系统原理
3.1 灵敏度标定实验
3.1.1 二维湍流传感器标定实验步骤
1)调整水流速度V 达到0.7 m/s 左右,并保持该流速不变。2)将传感器的倾角调节到10°,并尽可能使传感器灵敏轴的垂线方向与刻度盘平行,采集传感器输出电压信号,然后以2°的步长依次调整传感器的倾角从-10°~10°变化,并记录不同角度下的电压。3)关闭水阀,按照步骤(2)中的测量方法测量传感器在静水中的输出电压。4)将步骤(2)、步骤(3)中相对应的电压做差,得到修正后的电压Vout即为有用信号。5)根据S =Vout/ρU2sin 2α,将Vout/ρU2与sin2α进行多项式拟合,得到灵敏度S[15]。
3.1.2 实验结果
用0.7 m/s的水流来冲击传感器,由上位机软件对湍流数据进行采集并保存实时数据,再用仿真软件对采集的二维湍流数据进行处理,图6 为二维湍流传感器倾角为10°的时域输出信号,该信号经频域分析近似1 Hz 正弦规律变化,且2个敏感梁所测信号呈现正交,与传感器标定原理相符。
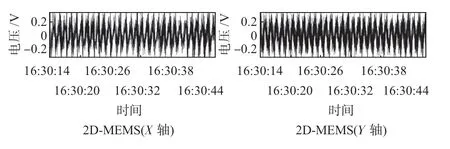
图6 二维湍流传感器输出信号
经低通滤波后得到传感器输出电压有效值,如表1所示。
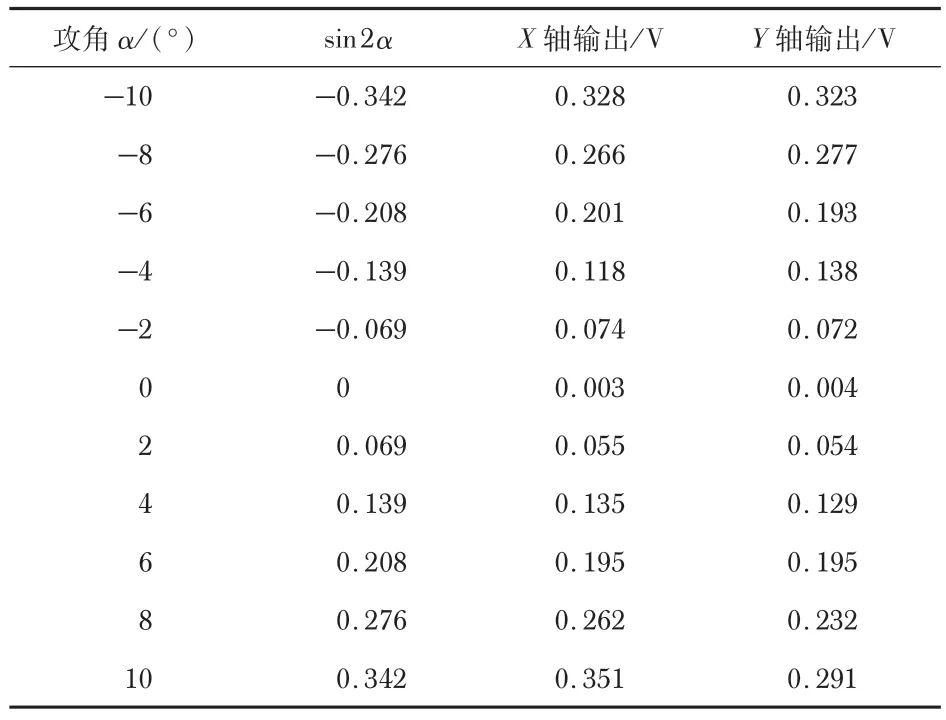
表1 传感器标定数据
由表1数据绘制标定拟合曲线,得到的旋转标定结果如图7所示。并根据灵敏度公式(7)求得X轴的灵敏度系数平均值为1.916 ×10-5Vms2/kg,Y 轴的灵敏度系数平均值为2.668 ×10-5Vms2/kg。通过拟合曲线可以看出,待测等强度正交梁二维湍流传感器2个轴(X、Y轴)的线性度显著,且传感器2 个轴灵敏度系数保持同一数量级,说明其一致性较好。
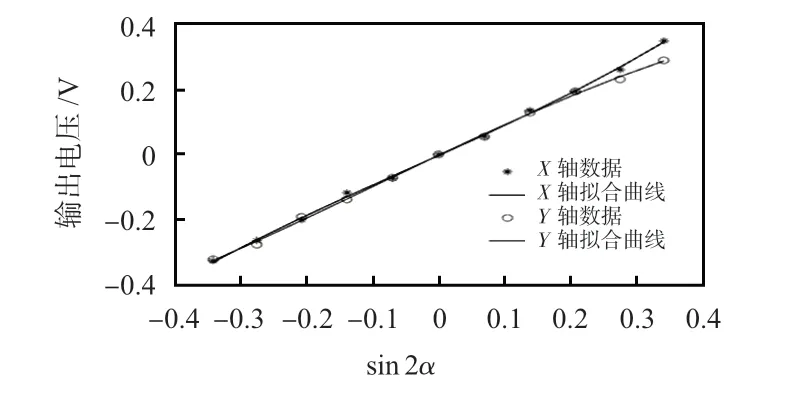
图7 等强度正交梁二维湍流传感器标定曲线
3.2 剪切传感器的湍流数据反演算法
剪切湍流传感器耗散率处理分为3 个步骤:时域到空间域数据处理、时域到频域数据处理和频域到波数域数据处理。
1)时域到空间域数据处理:从原始数据中提取出剪切探头受力产生的电压信号Ep,根据标定的传感器灵敏度系数和流速数据求得湍流流速脉动剪切时间序列∂u/∂t如下
式中 S为标定实验中得到的传感器灵敏度系数,U 为传感器相对于海水的运动速度(背景流速),u 为脉动速度。再经过泰勒冻结定理将速度脉动信号随时间的变换率准换为剪切信号
2)时域到频域数据处理:若发现能量谱中存在明显的噪声干扰,则说明传感器搭载平台振动对其产生了一定影响,会对剪切信号数据测量的准确性造成影响。为了消除噪声的影响,除了降低载体的振动外,对数据噪声进行后期处理。采用基于交叉谱的运动补偿校正算法,以此为理论依据消除平台运动过程中对湍流观测产生的影响[16]。
3)频域到波数域数据处理:将剪切能量谱利用泰勒冻结定理处理为波数谱,得到波数空间的剪切功率谱ψ(k),再进行空间范围的响应校正。在波数空间将其与标准Nasmyth理论谱进行拟合,经过积分迭代后计算出耗散率ε
式中 v为粘性系数,波数Kmin为积分下限,Kmax为积分上限。积分时通过计算出的柯尔莫哥洛夫波数不断地更新积分上限,从而不断迭代计算得到湍动能耗散率与积分截止波数,之后与标准经验谱进行对比检验对数据进行评价。
3.3 湖试实验
为了验证等强度正交梁二维湍流传感器的工作性能是否满足测湍要求,于2021年2月2~4日开展实验场相关试验,试验区域水深平均40 m,且保证传感器搭载平台下放速度为0.7 m/s左右。根据湍流反演算法理论对采集的数据进行耗散率谱图分析,得到的湍流耗散率谱如图8所示。
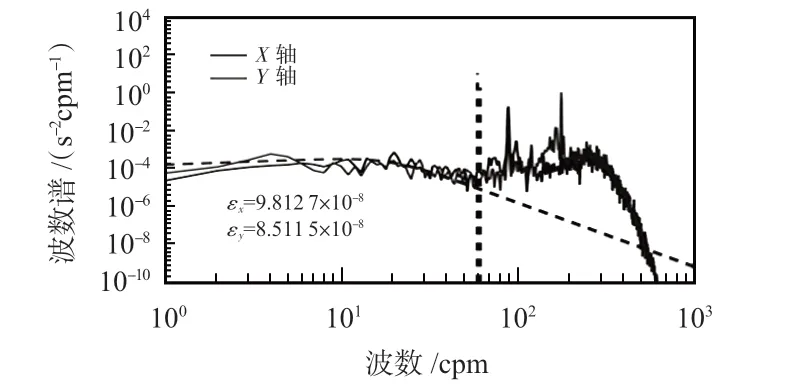
图8 二维湍流耗散率谱图
实验结果表明:所测湍流耗散率实际谱图与虚线的Nasmyth理论谱高度匹配,且前梁传感器所测湍流信号耗散率为9.81 ×10-8W/kg,后梁传感器所测湍流信号耗散率为8.51 ×10-8W/kg,说明剪切传感器X、Y 轴的一致性较好,结果比较理想。
4 结束语
本文提出了一种二维等强度正交梁结构的剪切湍流传感器,结合惠斯通电桥基于压敏效应,解决了传感器灵敏度与线性度间的矛盾以及不能同时测量单点多维度湍流的问题,达到了高灵敏度、高线性度的效果。
