智能网联汽车传感器检测与定位技术
2023-10-24陈林刘福华斯兴瑶王文慧
陈林 刘福华 斯兴瑶 王文慧

摘 要:智能网联汽车驾驶系统存在非线性、时变特性和不确定性等问题,无法满足不同工况下的控制需求。传感器感知与定位作为无人驾驶汽车核心技术,通过车辆的环境感知与定位使得无人车沿着目标轨迹行驶。首先,进行智能网联汽车传感器检测与安装,并记录毫米波雷达数据;然后对组合导航安装测量,采集定位地图,包括组合导航定位模式和融合定位导航;最后进行自动驾驶实验,利用联合仿真平台进行智能网联汽车控制研究,考察环境感知与定位技术效果。结果表明,优化智能网联汽车系统提升了可靠的控制性能。
关键词:智能网联汽车 定位技术 传感器检测 检测与安装
1 智能网联汽车背景分析
汽车的保有量逐年增加,导致了交通事故、交通拥挤、环境污染等问题[1]。另外,驾驶员的状态决定了汽车的行驶状态,技术成熟的无人驾驶系统比参差不齐的驾驶员技术更加可靠[2]。智能网联汽车环境检测技术是无人驾驶汽车关键技术之一,其性能的好坏直接影响到智能网联汽车对规划感知与规划的效果。由于汽车自身的强耦合、非线性、时变性等动力学特征,加上多变的行驶工况,因此,想要使无人驾驶汽车具有较好的感知与定位性能仍面临不小的挑战。增加传感器的方法能协调控制需求,一些关键技术还需要进行探索和研究[3]。
传感器感知与定位研究现状各个机构的进度和关注的技术点不尽相同,基本的智能网联汽车环境感知与定位技术是相似的,路径规划主要包括四个方面的能力:感知部分、规划部分、处理部分和执行部分[4]。在智能网联汽车中,多传感器融合,各种电器设备和执行机构共同组成了自动驾驶技术,由传感器感知的环境的传感器进行处理,转化为执行命令,实现智能网联汽车自动驾驶。除了汽车企业,部分互联网企业也对智能网联汽车驾驶技术进行了深入布局[5][6]。
环境检测的准确度直接影响智能网联汽车的可靠性。从智能网联汽车环境感知的准确性、实时性、稳定性以及易实现性等方面进行研究,安装雷达传感器和组合导航,采集定位地图,搭建出一种适合的智能网联汽车环境感知与定位联合仿真平台。在此基础上,利用联合仿真平台进行无人驾驶汽车环境感知与定位技术研究,以全面考察环境感知和定位效果。通过对国汽(北京)智联的智能网联汽车平台搭建,带动无人驾驶汽车环境感知与定位技术研究[7]。
2 智能网联汽车传感器检测安装
安装智能网联传感器是为了获取汽车环境及定位等信息,是环境感知融合和决策控制系统提供信号输入的器件或装置,主要包含激光雷达、毫米波雷达、视觉摄像头、超声波雷达、组合导航等。
2.1 毫米波雷达装调
在装调传感器之前,需要熟悉电路图和装配图,正确选择元器件和识别安装位置,正确理解传感器装配要求。
智能网联汽车传感器装调时,在智能化器件品质检测工位,并按正确的工艺进行装配,安装品质检测筛选合格的毫米波雷达。
首先用万用表检测确认电池电压为12V;然后把毫米波雷达CAN分析仪与电脑的USB接口链接,最后在整车上正确完成传感器电路与信号传输的调试。在上位机显示屏上出现数据和点迹,表示雷达检测正常,反之则需要重新检查。
2.2 毫米波雷达安装
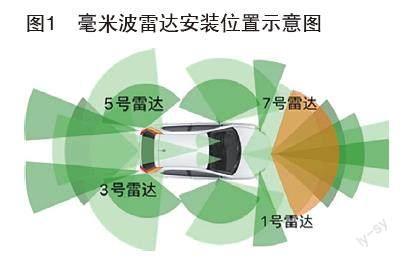
把毫米波雷达编号为1、3、5、7的雷达,1号雷达安装角度为水平40度即可。毫米波雷达具体安装步骤,以3号毫米波角雷达为例。毫米波雷达安装位置如图1所示。
首先使用内六角扳手将毫米波雷达安装到毫米波雷达支架上,然后进行螺丝紧固,最后将毫米波雷达线束插上,每个毫米波雷达有固定的位号,需将安装位置做好标记,使用红色油漆笔在毫米波雷达支架上标记“竖线”。
2.3 毫米波雷达数据检测
毫米波雷达是工作在毫米波波段探测的雷达,频段一般为 30 GHz ~ 300 GHz,波长 1~10mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的一些优点。车载毫米波雷达分配的频段各有不同,主要集中在24GHz和77GHz。
在电磁频谱中,毫米波长被视为短波长,是它在道路探测中的优势。毫米波雷达的波形具体如图2所示。毫米波雷达相比超声波雷达具有体积小、易集成和空间分辨率高的特点,极小的系统组件就能处理毫米波信号。短波长优势是高准确度,77GHz左右的毫米波系统能够检测零点几毫米的移动,有利于提高环境感知的准确率。
毫米波雷达利用高频电路产生特定调制频率(FMCW)的电磁波,同时对多个目标进行测距、测速以及方位角测量;通过计算返回接收天线的雷达波的频率变化计算目标相对于雷达的运动速度和飞行时间,得出目标物距离;方位测量通过天线的阵列收到同一目标反射的雷达波的相位差计算得到目标的水平方位角和垂直方位角。
调频连续波雷达发射功率低,尺寸小,成本低廉,测量目标距离和速度的性能与周围环境的光照情况无关,不用辅助光源提供照明。能够通过点云测出周边环境的情况,包含 2D/3D 位置、反射率和径向相对速度,进一步提升智能网联汽车的可靠性和安全性。
雷达数据集在城市环境中采集了多段数据,使用的雷达是Navtech开发的一款 76Ghz~77Ghz毫米波雷达,用窄波束进行机械扫描,波束宽度1.8°,每次间隔0.9°,即每旋转一圈获得400个角度向测量。机械旋转速度约4Hz,距离分辨率4.32cm,最大测距163m。
安装了毫米波雷达后,无论天气和周围的光照条件如何,雷达都能够可靠、准确地探测和定位障碍物。智能网联汽车传感器检测与定位更精准,能进一步提升安全性和舒适性。
3 组合导航
3.1 组合导航组件测量
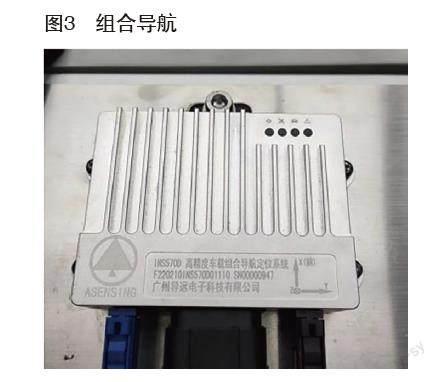
组合导航在出厂时已安装完毕,需测量并记录其安装数据。组合导航组件分为组合导航和定位天线,具体如图3和图4所示。
以汽车两后轮中心轴,后轮间距中点为原点,建立x、y、z三维坐标系,车头方向為y轴正半轴,右侧为x轴正半轴,上方为z轴的正半轴,记录组合导航与定位天线的安装位置坐标。其中汽车共有两个定位天线,只需记录后面的定位天线,测出天线底座坐标值。
组合导航与后定位天线的安装在后车轮距的正上方,组合导航的安装坐标与后定位天线的安装坐标值的x、y轴均为0,测量两者与地面的距离后,再减去车轮半径,得到z轴坐标。
4 定位地图
智能网联汽车的定位模式也分为两种,一种为组合导航定位模式,一种为融合定位模式。
4.1 特定地图的定位
当智能网联汽车在具有特定地图的环境中运动时,可以使用地图模板匹配。
使用毫米波雷达和图像识别传感器来感知环境,然后将感知结果与预存地图进行比较;若匹配成功,则可获得移动设备在具体环境中的位置与方向。模板地图需要提前采集,用于室外环境时,通常会与GPS一起使用,以确定设备的路面所在位置。
4.2 地标导航定位
地标导航地标技术用于已知环境下的导航。自然界特定的目标物和人工地标可以被检测识别到。地标导航具备一个保存特征与精确地理位置的数据库。
人工地标是为定位和导航而添加到环境中的物体,自然地标已经存在于环境中。每个地标有一个固定的位置。车辆装备有特征和位置的数据库。车辆能够从传感器输入可靠地识别地标,并以确定其自身位置的方式处理数据。
4.3 全球卫星导航定位
全球卫星导航用于室外导航,如:美国GPS导航、中国北斗卫星定位导航系统。
通过三边测量,地面接收机可以利用卫星信号的运行时间和当前位置信息来计算位置。接收机与卫星的确切距离已知时,可计算接收机的纬度、经度和高度,其中3个是理论上的最小距离,4个可以校正接收机的时钟偏差。只要有足够的卫星覆盖,GPS可为户外导航提供了良好的绝对定位。
4.4 组合导航定位
组合导航使用两种及两种以上的定位方法,以获得智能网联汽车更可靠的定位信息。
全球定位系统GPS接收器只需三颗卫星的距离,就可利用三边测量原理计算三维位置,用第四颗卫星来估计接收机时钟的偏移量。但GPS系统可能会出现信号阻塞、多径效应和信号中断等问题。为提供更精确的实时定位信息,GPS需要与其他具有互补特性的系统集成,以满足GPS问题情况下的导航定位。
组合导航系统可获得更高精度的位置与速度,可以得到更准确的姿态信息,具有较高的数据输出频率能解决GPS信号阻塞时的导航问题,进一步提升智能网联汽车可靠性。
5 自动驾驶测试实验
安装好了毫米波雷达并进行装调检测,安装组合导航,对定位地图的数据进行采集,准备完毕后,进行智能网联汽车自动驾驶实验。打开车辆调为N挡位,仪表板为READY,具体如图5所示。
在导航地图中设置目标点,查看座舱域网络连接下划mp5显示屏,点击WIFI连接,大概三分钟后,WIFI连接成功,等待WIFI连接成功后,点击cicv map图标,点击刷新地图,具体见图6中红框图标。
在地图上选取终点,按住车辆所行驶的车道,选取行驶终点,长按回弹出提示对话框,询问是否选择该点为终点。只能选取车辆所在车道作为行驶的中点,点击“确定”按钮,等待全局路径规划成功。具体如图7所示。
进入自动驾驶模式,首先松开刹车,然后抬起“P”按钮,待显示屏P档解除,按“A”按钮,进入自动驾驶模式,最后通過命令行登录两个控制器,启动智能化程序,开启融合定位、融合感知、决策规划、控制执行等,进行路径规划。在默认情况下,程序会在控制器上电时自启动,无需手动启动。智能网联汽车自动驾驶实验经过上述的测试,能够满足路径规划需求。
6 总结
对智能网联汽车传感器检测与定位技术研究,通过智能网联汽车传感器检测与安装,数据记录,组合导航安装测量,定位地图采集,进行自动驾驶实验,进一步对智能网联汽车环境感知与定位技术研究,进一步提高智能化水平。
项目来源:院级科研项目(y b z y sc 2 0-62),宜宾职业技术学院科技创新团队(y b z y 2 0 c x t d 0 5)和平台(ybzy20kypt04)建设计划赞助。
参考文献:
[1]李宇昊,赵又群.基于双层控制策略的四轮独立转向无人驾驶汽车路径跟踪[J].江苏大学学报(自然科学版),2022,43(04):386-393.
[2]张维刚,张朋,韦昊,熊觉振.一种基于LTVMPC改进的无人驾驶汽车路径跟踪控制算法[J].湖南大学学报(自然科学版),2021,48(10):67-73.
[3]贾长建.车联网技术视域下无人驾驶新能源汽车路径跟踪控制系统设计[J].工业加热,2020,49(12):47-49+52.
[4]吴小龙,夏甫根,陈静,徐佳.基于能量最优的无人驾驶汽车路径跟踪控制[J].系统仿真学报,2022,34(01):163-169.
[5]张家旭,周时莹,施正堂,赵健,朱冰.采用滑模条件积分的无人驾驶汽车弯道超车路径规划与跟踪控制[J].控制理论与应用,2021,38(02):197-205.
[6]张飞铁,奉山森,黄晶.无人驾驶汽车路径跟踪控制研究[J].计算机仿真,2019,36(06):175-178+407.
[7]郭应时,蒋拯民,白艳,唐杰帧.无人驾驶汽车路径跟踪控制方法拟人程度研究[J].中国公路学报,2018,31(08):189-196.