STEP 函数驱动铰链四杆机构双摇杆运动仿真研究
2023-10-24袁梅
袁 梅
(贵州航空职业技术学院,贵州 贵阳 550009)
0 引言
平面铰链四杆机构由四根长短不一的杆件,且两杆之间均用转动副相连。四根杆分别称为机架、连杆、连架杆(2 个)。机架为固定杆,固定杆对面的杆称为连杆,机架与连杆之间的2 个杆称为连架杆。
按照其各杆长度关系及结构形式的不同[1],铰链四杆机构的运动形式分为:曲柄摇杆、双曲柄、双摇杆三种。其中形成双摇杆机构的条件有两种:一种是最短杆与最长杆长度之和小于或等于其他两杆长度之和,且以最短杆的对边为机架。另一种是最短杆与最长杆长度之和大于其他两杆长度之和,任意杆为机架均为双摇杆机构。
本文应用UG 软件对铰链四杆机构进行运动仿真,而双摇杆机构,因为其主动连架杆是绕着旋转副的轴线在小于360°范围内往返摆动[2]。因此双摇杆机构的运动仿真必须确定主动连架杆的两个极限位置即摆角。
1 摆角确定
1.1 运动形式
以图1 为例,各杆的长度设置如下图所示,AD为主动杆。
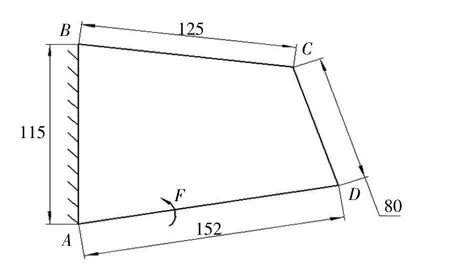
图1 铰链四杆机构尺寸
最短杆是连杆CD,其对边AB设为机架。由以上条件则该平面铰链四杆机构的运动形式为双摇杆。
1.2 最大摆角
以主动摇杆AD为研究对象。
(1)极限位置1:AD与DC拉直共线时,主动摇杆AD处于AD1位置,如图2 所示。
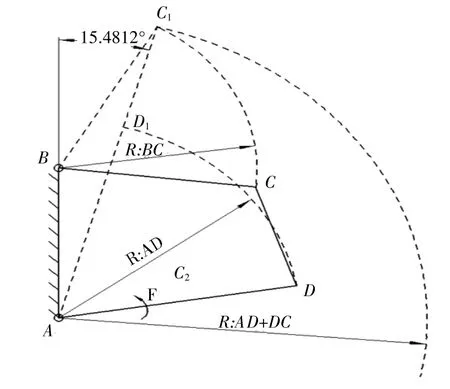
图2 极限位置1
求AD1与机架AB的夹角∠BAD1。
方法1:图解法。CAD 软件CAXA 电子图板为载体绘制图形。
①A点为圆心,AD+DC为半径画圆弧。
②B点为圆心,BC为半径画圆弧,两圆弧交于C1点。
③连接AC1。
④A点为圆心,AD为半径,交于AC1于D1点。
⑤测量∠BAD1= 15.4812°。
方法2:解析法
依据余弦定理:
因此∠BAD1的夹角,图解法与计算法结果一致。
(2)极限位置2:BC与CD拉直共线时,主动摇杆AD处于AD2位置;AD2与机架AB的角度99.377°,如图3 所示。
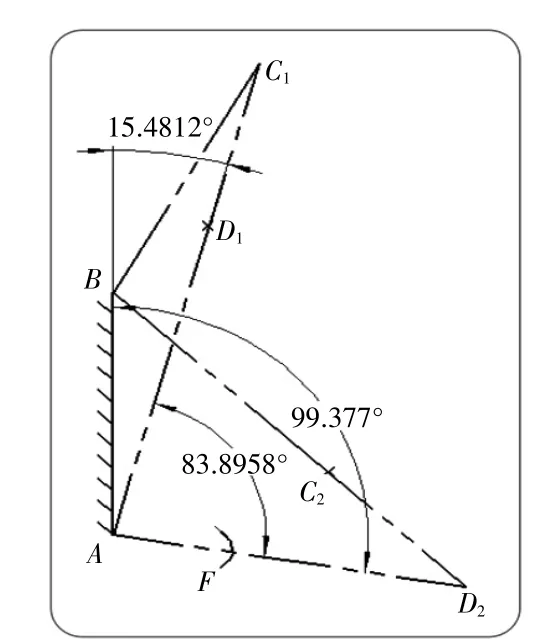
图3 极限位置2
(3)极限位置3:BC与CD拉直重叠时,主动摇杆AD处于AD3位置;AD3与机架AB的角度11.1169°,如图4 所示。
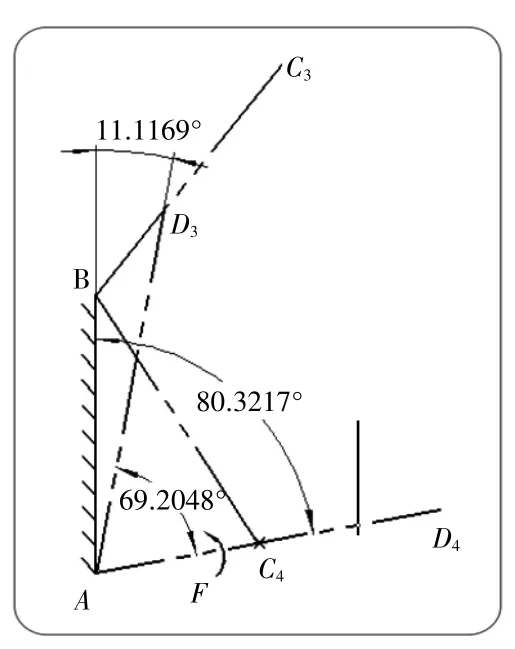
图4 极限位置3、4
(4)极限位置4:AD与DC拉直重叠时,主动摇杆AD处于AD4位置;AD4与机架AB的角度80.3217°,如图4 所示。
通过图解法在连杆与连架杆共线、重叠情况下,分析主动摇杆AD,与固定机架AB的夹角,并用解析法验证夹角,结论一致。确定主动摇杆AD两个极限位置AD2、AD3,其摆角确定为99.377° - 11.1169° =88.2601°。如图5 所示。
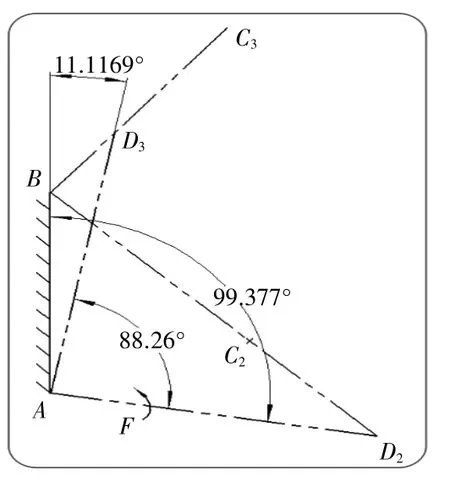
图5 最大摆角
2 初始位置
UG 软件仿真建模、装配4 个杆,因为摇杆做摇摆运动,装配时对主动摇杆仅约束同心、接触对齐。所以主动杆与机架的夹角不是其极限位置,有随机性。选择软件【分析】/【测量】/【简单角度】命令,参考全部选择【矢量】,得到平面铰链四杆机构主动摇杆AD与机架AB装配后随机的夹角64.5619°。如图6 所示。
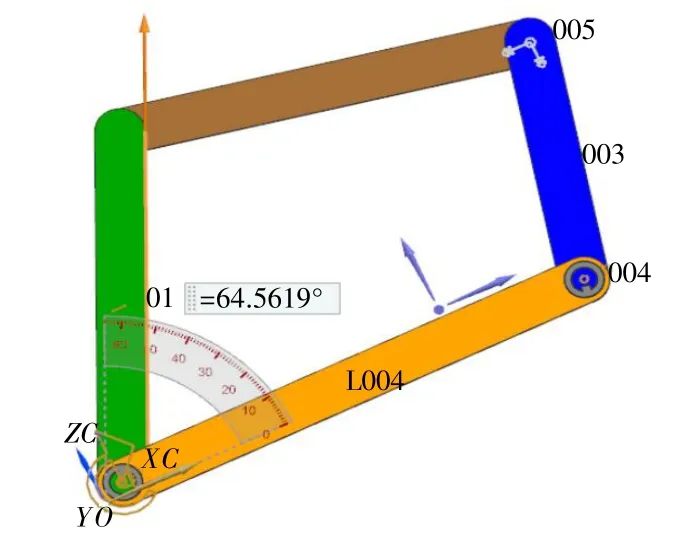
图6 AD 杆装配位置
3 STEP 函数驱动
3.1 STEP 函数特点
STEP 函数作为一种运动函数,其基本表达式为STEP(x,x0,h0,x1,h1),X为自变量,代表TIME 以及任意函数。STEP 函数可以是位移、速度和加速度、角度等运动函数[3]。
利用UG 自带的STEP 运动仿真函数可控制模型驱动的运动时间段,对双摇杆机构在运动极限范围内进行运动仿真[1]。
3.2 规划路径
在运动仿真中,需要将实际运动函数模型转为UG 仿真模块中的STEP 运动控制函数,从而控制机构的运动规律[4]。规划设计主动摇杆AD的运动路径,初始位置AD→AD2→AD3→AD2→AD3结束位置,如图7 所示。按照近似匀速的运动,主动摇杆摆动1°,按0.01 s 计算。
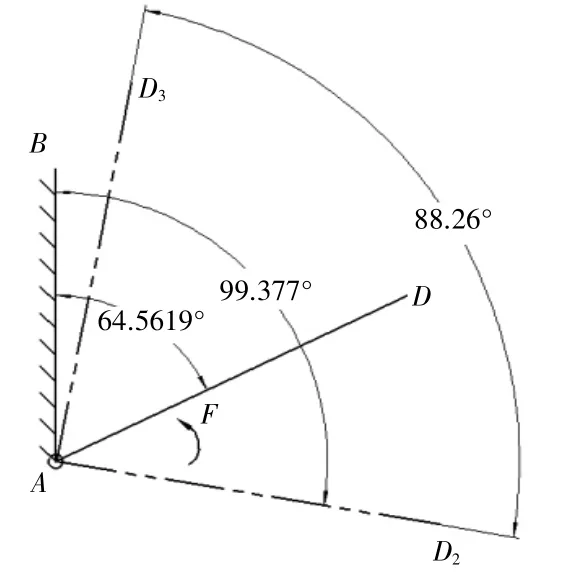
图7 AD 杆运动规划
3.3 编辑STEP 函数
STEP 函数编辑如下:
STEP (time,0,0,0.348151,34.8151) + STEP(time,0.348151,0,1.230752,-88.2601)+
STEP (time,1.230752,0,2.113353,88.2601) +STEP (time,2.113353,0,2.995954,-88.2601) + STEP(time,2.995954,0,3.878555,88.2601)
注:34.8151=99.377-64.5619 如图7 所示。
3.4 STEP 函数驱动仿真
仿真步骤如下:
进入UG 软件的运动仿真界面→设置连杆→运动副→驱动→解算方案→求解。“驱动”输入STEP 函数。连杆、运动副设置见图8 所示。
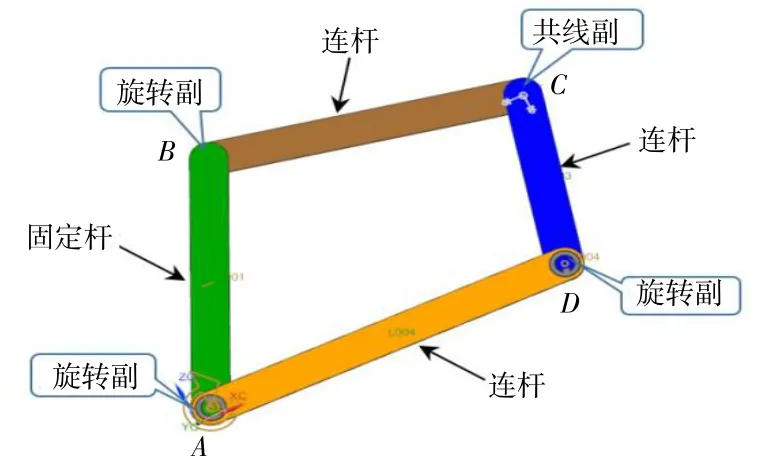
图8 铰链四杆机构仿真设置
通过双摇杆运动仿真可以得到各杆的运动特性。AD主动摇杆位移随时间变化的规律图,见图9。AD主动摇杆速度-角度幅值图,见图10。
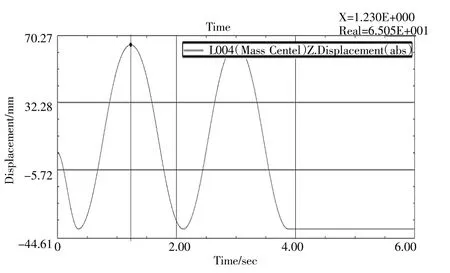
图9 AD 杆运动时间-位移
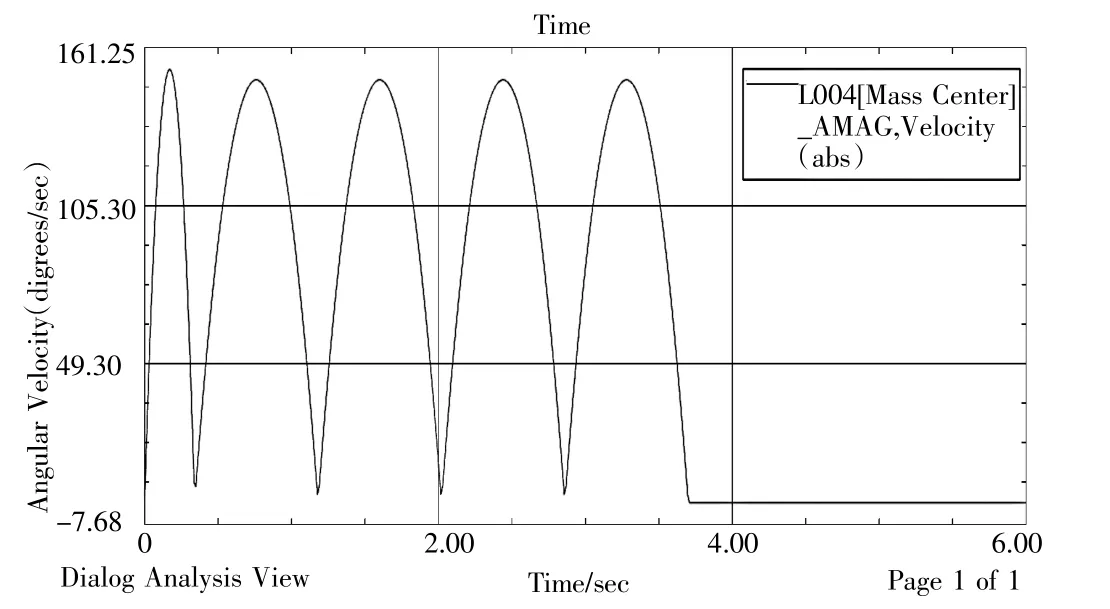
图10 AD 杆运动速度-角度幅值
3.5 仿真结果
依据主动摇杆AD当前在仿真软件中与机架的位置,及其两个极限的位置,即初始位置AD→AD2→AD3→AD2→AD3结束位置。主动摇杆每转1°按0.01秒计时的方法简化其匀速运动。STEP 函数根据规划的路径,设置时间与主动摇杆摆角的变化来驱动主动摇杆的运动。最后得到所需摇杆运动规律图。
4 结语
依据铰链四杆机构双摇杆运动规律分析,运用CAXA 电子图板或AUTOCAD 软件作为载体,绘制几何图形。研究分析铰链四杆机构主动摇杆的最大摆角,根据STEP 函数的特点,规划STEP 函数来驱动铰链四杆机构主动摇杆的运动,从而获得双摇杆的运动仿真,得到了双摇杆机构在极限夹角范围内、不同时间段的运动变化规律[4]。利用函数驱动构件的运动仿真[3],该方法对研究机构的设计、仿真和运动特性提供了一定思路。
