虚拟视景下数字化军校全息强化数据感知
2023-10-22李弘扬张利龙
李弘扬, 刘 洋, 张利龙
(海军工程大学, 武汉 430033)
0 引 言
随着军队院校智慧教室和智慧课堂的广泛应用,对智慧教室的硬件投入强度也不断增大,结合VR 的虚拟现实仿真技术,建立智慧教室的场景交换虚拟视景仿真模型,通过虚拟化的视觉重构和三维重建,应用在教学平台中,实现数字化军校教学管理。 在采用虚拟现实技术建立数字化军校教学场景的可视化分析模型中,数字化军校全息强化数据感知的基础,通过构建数字化军校全息强化数据感知模型,结合数据图像分析和云平台技术,实现对数字化军校教学场景的运维控制[1]。 研究虚拟视景下数字化军校全息强化数据感知技术,在促进院校的虚拟课堂教学环境搭建中具有重要意义。
对虚拟视景下数字化军校全息强化数据感知是建立在视觉信息特征重组基础上,通过对数字化军校教学场景分布设计,进行数字化军校教学场景的优化铺设控制,提高数字化军校教学场景铺设和运维管理的可靠性[2-3],文献[4]中提出结合Vega Prime 进行数字化军校教学场景三维可视化系统设计方法,采用3DStudio MAX 软件进行数字化军校教学场景分布融合设计,结合不规则点的三维空间重构,实现对军校教学运维管理数据的强化感知学习。文献[5]中结合3D 信息重构和VR 仿真技术,进行数字化军校教学场景融合处理,但传统方法进行全息数据感知的辨识度不高,三维视觉重构性能不好。对此,本文提出基于云端一体化数据融合和三维虚拟视景重构的数字化军校全息强化数据感知模型。首先,构建三维视觉信息采样模型,结合三维虚拟场景的层次化结构分析,进行数字化军校教学场景特征重组,然后通过数字化军校教学场景三维可视化重构和视景仿真过程中的误差补偿控制,提高数字化军校全息强化数据感知能力。 最后,进行仿真测试,展示了本文方法在提高数字化军校全息强化数据感知和视景重构能力方面的优越性能。
1 数字化军校全息强化数据感知结构构建
为了实现对数字化军校教学场景三维可视化系统的优化设计,需要构建虚拟视景下数字化军校全息强化数据感知,首先构建数字化军校教学场景三维可视化数据库,采用LightWave3D 可视化分析软件构建数字化军校教学场景的分布模型[6],在嵌入式的B/S 总线控制模型下,进行数字化军校教学场景三维可视化的图像采样和信息融合,结合三维虚拟场景的层次化结构分析,进行数字化军校教学场景的逻辑筛选、分离面裁剪等处理,建立数字化军校教学场景三维可视化的源图像,使用Vega Prime 编辑器进行数字化军校教学场景三维可视化程序加载,总体结构如图1 所示。
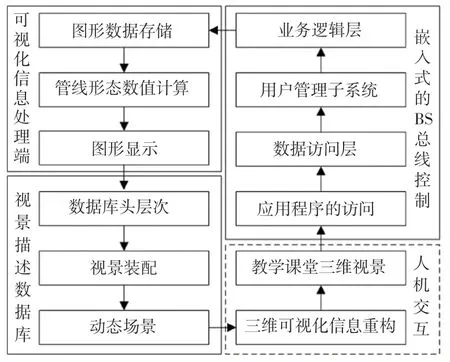
图1 数字化军校教学场景三维可视化感知结构模型Fig. 1 3D visual perception structure model of teaching scene in digital military academy
根据图1 的总体结构模型分析,采用总线传输控制和嵌入式的调度技术,进行高数字化军校教学场景可视化特征信息重组,在嵌入式ARM 系统中建立数字化军校教学场景可视化传输总线,在自适应传输控制协议下建立数字化军校教学场景可视化平台的内核结构[7],采用物联网直接通过网络接口与网络相连,在数字化军校教学场景的扩展模型中,通过iSCSI 技术实现视景重建和信息加载。 在数字化军校教学场景的三维虚拟现实可视化视景仿真中,可以充分利用纹理映射技术,采用Unity3D 的可视化重构,进行数字化军校教学场景三维可视化系统的主机引导控制,数字化军校教学场景三维可视化体系模型如图2 所示。

图2 数字化军校教学场景三维可视化体系模型Fig. 2 3D visualization system model of teaching scene in digital military academy
2 视觉特征采样模型及场景特征重组
2.1 数字化军校教学场景视觉特征采样模型
根据数字化军校教学场景三维可视化视景重构的选型方案,构建数字化军校教学场景三维可视化系统的静态视觉感知模型[8],军校教学场景三维全息感知的像素特征分布集用Fm(x,y) 表示,得到第m帧(x,y) 处数字化军校教学场景全息图像的像素灰度值,Bm(x,y) 表示从前一帧计算的相同属性值的数据点的集合,得到教学场景子带扫描的增强图模型参数输出为:
其中,m是当前帧采集的数字化军校教学场景的轮廓,Fi(x,y) 为动态帧序列的梯度序列。 当m逐渐变大时,根据断层序列图像上的外部真实像素,采用信息素增强技术,得到增强处理后的视觉样本序列为:
其中,λ为数字化军校教学场景三维可视化系统的实体视觉均衡度;Lg(φ) 为教学场景重建的光照强度;v(I) 为模糊匹配系数;Ag(φ) 为三维教学场景融合的特征分布信息。 基于图像梯度权系数分析方法,得到纹理渲染数据库的模型化特征参数用λ,ν表示,且λ >0, 各层图像轮廓线之间相互收敛,由此建立了数字化军校教学场景视觉特征采样模型,特征图模型参数识别和空间结构重组,进行视觉场景特征重构[9]。
2.2 视觉场景特征重组
结合三维虚拟场景的层次化结构分析,进行数字化军校教学场景特征重组,通过Insert Materials tool 生成数字化军校教学场景的等高线模型重建[10],得到重构模型参数为:
其中,w(z,v) 能够用来描述数字化军校教学场景三维可视化重组的边缘的廓;r(z,v) 为单层二维图像空间变换函数;ζ是特征点的坐标;H为稀疏性特征重建函数。 根据上述分析,采用虚拟现实VR技术进行视景重组[11],得到视景重组的特征分布公式如下所述:
在上述公式中,Rt是数字化军校教学场景三维轮廓提取之后的图像边缘分布矩阵;Rh是多余像素点;为轮廓点在Y方向位置信息偏移信息;为各个角度的图片进行三维模型恢复的偏移信息。
对教学场景进行全方位扫描从而生成点云信息,得到目标位置信息,其公式如下所述:
在上述公式中,hj能够用来描述三维模型的密集变化率;g(y,z,a) 为沿视线反向投影图的拼接特征函数;Tj是对应的灰度矩阵。 由此建立数字化军校教学的VR 视觉场景特征重组模型,在线程分配和用户自主交互的三维图模型中实现对数字化军校全息强化的数据特征筛选和清洗,基于场景渲染和帧误差补偿技术进行信息感知融合。
3 虚拟视景的全息强化信息感知
在上述构建的数字化军校全息视景重建模型的基础上,进行军校全息强化数据感知,基于三角形网格的表面模型分割,得到全息强化数据感知的特征点空间位置关系:
其中,为多视图立体特征分辨率;m为全息信息感知的动态强化分配参数;为多视图立体任务感知的逆变特征量;y为Sigmoid 激活子网信息;v为虚拟视景的空间位移转换系数;a为联合自相关分配系数。 用Q1 和Q2 表示成型点,点Q是视景重建的空间分配点线相交的位置。
综上分析,基于实例本身特征图模型参数分析,得到船舶动态重构的输出稳态特征值与Y轴平行。三维重建的空间分配成像点Q1 和Q2 在对应的图像重建的空间位置分别是(v1,w1) 和(v2,w2),c采用场景渲染和帧误差补偿技术,进行数字化军校教学场景三维可视化重构和视景仿真过程中的误差补偿控制,提高数字化军校全息强化数据感知能力[12]。
4 仿真测试
为了验证本文方法在实现对数字化军校教学的VR 视觉场景重建和全息强化数据感知的性能,在三维ICAD 系统中构建数字化军校教学场景的实体模型,通过Matlab 仿真进行全息数据感知的仿真分析,采用Creator Terrain Studio(CTS)实现对军校教学场景的虚拟视景仿真平台搭建,教学场景三维视景重建的参数分布见表1。

表1 教学场景三维视景重建的参数分布Tab. 1 Parameter distribution of three - dimensional visual reconstruction of teaching scene
根据表1 的参数分布,设定全息数据采样的样本大小为3 000,测试集为200,训练样本集为100,给出在某虚拟教学场景下三维重建灰度图如图3 所示。
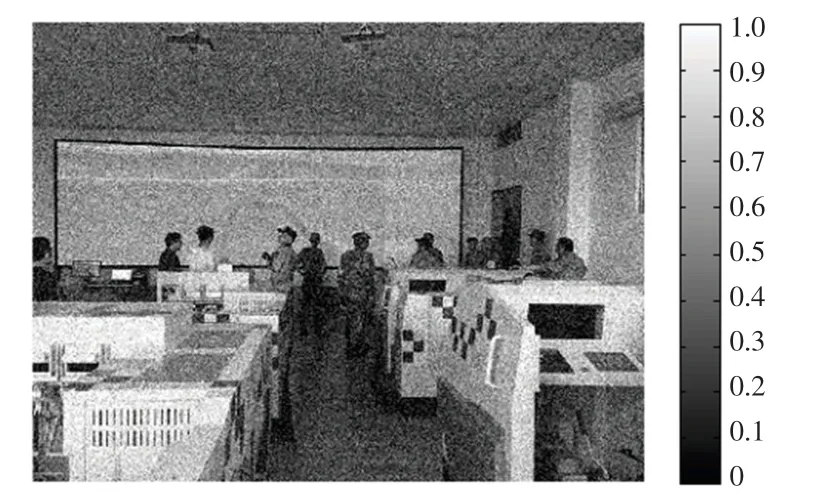
图3 虚拟教学场景三维重建灰度图Fig. 3 Three-dimensional reconstruction gray map of virtual teaching scene
以图3 的灰度图为测试对象,采用本文方法进行虚拟视景下数字化军校全息强化数据感知,得到数据感知结果如图4 所示。
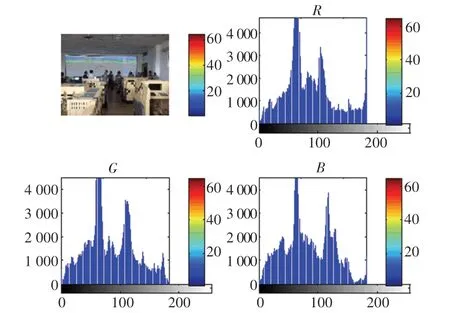
图4 RGB 三通道全息数据感知结果Fig. 4 Perception results of RGB three-channel holographic data
分析图4 得知,本文方法能有效实现对三通道的数据信息感知和特征采样,在此基础上,实现对数字化军校全息教学的三维虚拟视景重构,重构结果如图5 所示。 分析图5 得知,该方法进行数字化军校全息信息感知,提高了三维视景重构能力,视景重建的视觉逼真度较高。

图5 数字化军校全息教学的三维虚拟视景重构Fig. 5 3D virtual scene reconstruction of holographic teaching in digital military academy
测试不同方法进行全息数据感知的精度,得到对比结果如图6 所示。 分析图6 得知,本文方法对数据感知的精度较高,抗干扰能力较强。
5 结束语
通过构建数字化军校全息强化数据感知模型,结合数据图像分析和云平台技术,实现对数字化军校教学场景的运维控制。 本文提出基于云端一体化数据融合和三维虚拟视景重构的数字化军校全息强化数据感知模型。 结合三维虚拟场景的层次化结构分析,进行数字化军校教学场景特征重组,采用Unity3D 的可视化重构,进行数字化军校教学场景三维可视化系统的主机引导控制,对教学场景进行全方位扫描从而生成点云信息,进行数字化军校教学场景三维可视化重构。 分析得知,本文方法对军校管理数据的全息强化数据感知的精度较高,三维重构能力较好。
